
GNSS-RO Deep Refraction Signals from Moist Marine Atmospheric Boundary Layer (MABL)


Abstract
:1. Introduction
2. Method and Data Analysis
2.1. GNSS-RO Bending in a Moist Atmosphere
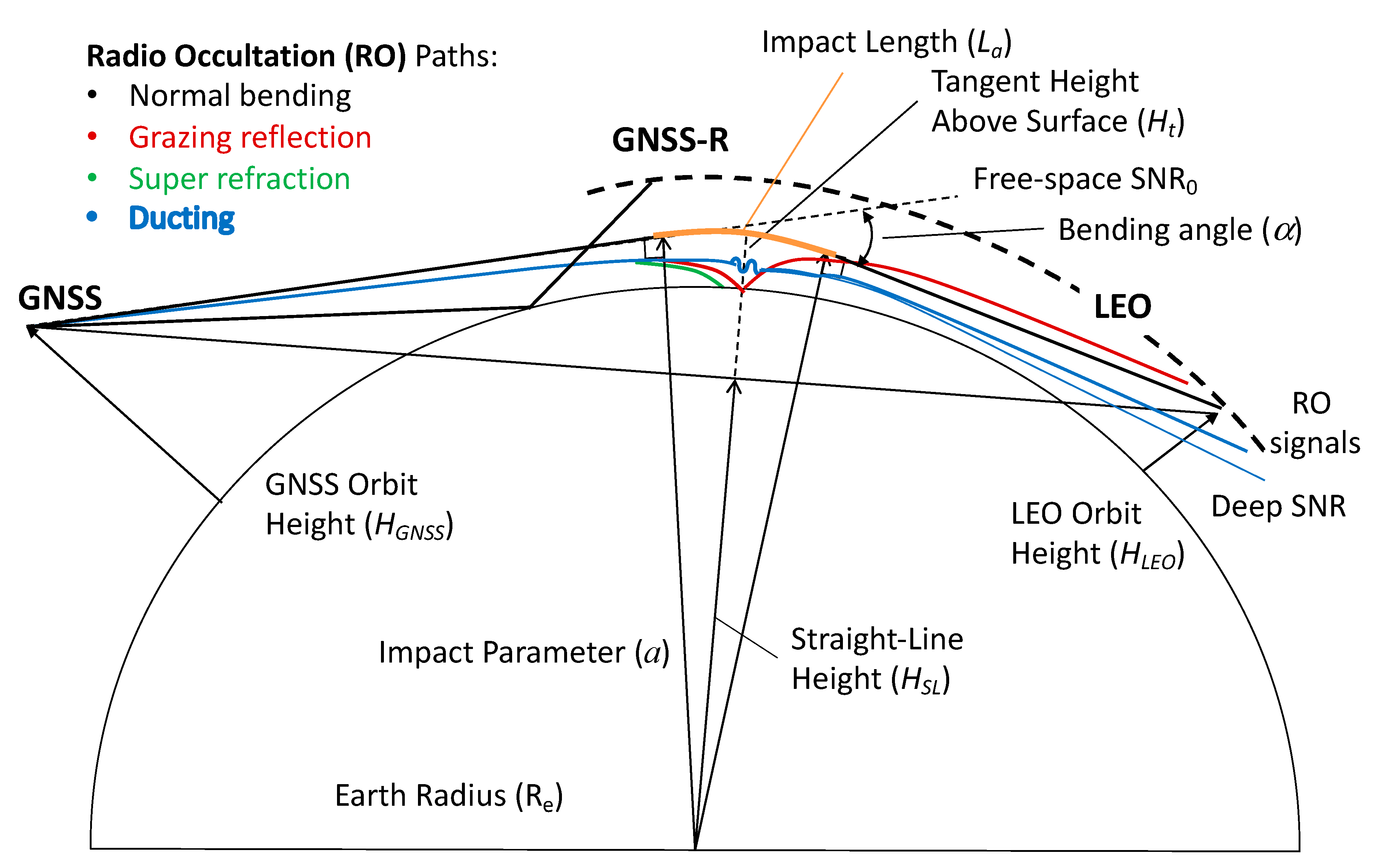
- Normal bending: As radio waves pass through the atmosphere, their paths are bended by the atmospheric refractivity N profile with a vertical gradient. This vertical N gradient acts as an optical prism to refract and diverge the RO beam, causing a weaker power per receiving area compared to the free-space case. This is known as the defocusing effect [17]. Thus, the RO signal amplitude, or SNR in voltage (V/V), decreases gradually at lower HSL due to the defocusing effect. In the presence of a sharp N vertical gradient, such as the ABL top, a threshold may be used to detect ABLH [9,23].
- Grazing reflection: Unlike GNSS-R, which acquires GNSS signals at a larger reflection angle, grazing reflection takes place at a bending angle similar to the RO sounding. The reflected signal at a grazing angle does not necessarily reverse polarization, which allows the direct and reflected signals to interfere with each other at the RO receiver. Thus, grazing reflection is a multi-path problem in GNSS-RO observations. The interference generates coherent or semi-coherent signals that manifest themselves in a radiohologram of the RO sounding. The reflective surface can be either a smooth ground surface or an elevated atmospheric layer (e.g., water vapor layer). Both RO grazing reflection and GNSS-R signals can be used to detect smooth, flat surfaces [24,25].
- Super-refraction (SR) effect: This occurs where atmospheric bending exceeds the Earth’s curvature (dN/dz < −157 N-unit/km). In such cases, the RO path is bended down more than the Earth’s curvature such that the signal is unable to reach the RO receiver [26]. However, the SR condition is sensitive to the angle of incidence with respect to the refractive surface in such an impact. As the GNSS-RO sounding progresses, especially during the open-loop operation, the incident angle would vary with HSL and allow the RO signal to re-emerge from a temporary loss. The re-appearing signals are still partially affected by the SR interface and can cause a systematic negative bias in the N retrieval (i.e., negative N-bias) [17].
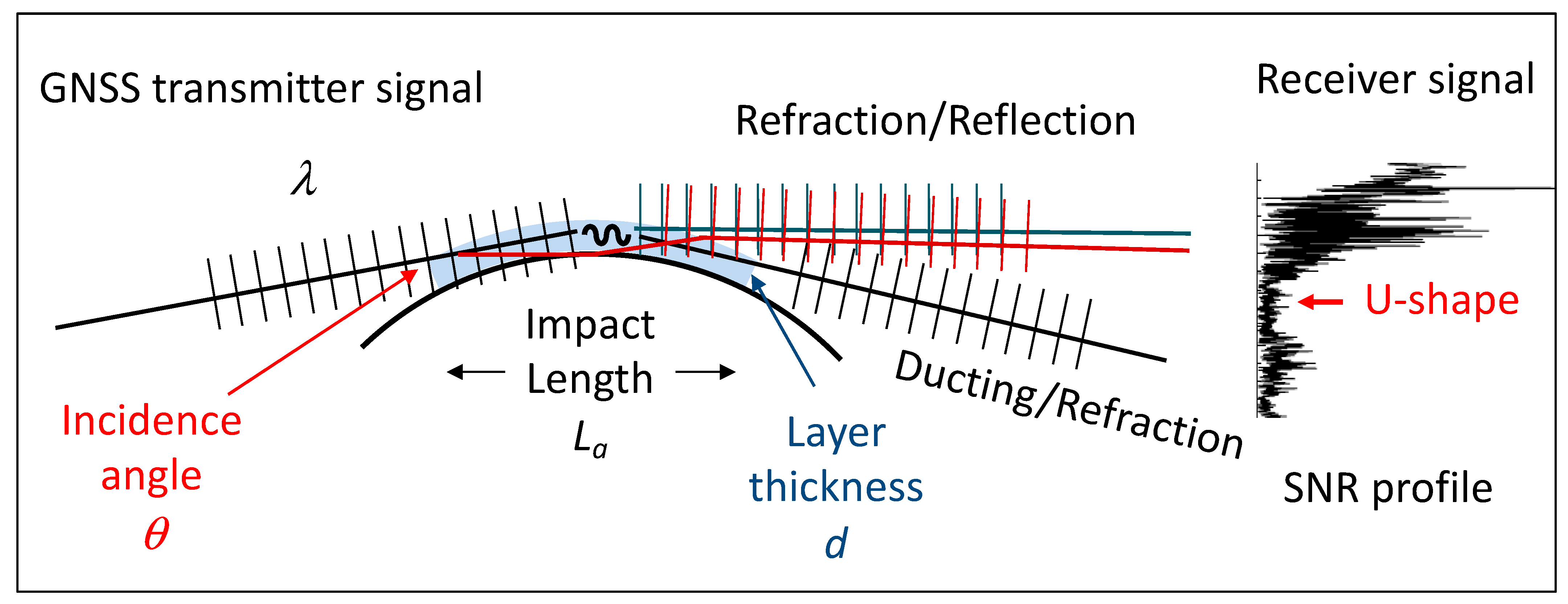
- Ducting effect: The RO propagation can be trapped in a thin atmospheric layer or between the surface and a reflective atmospheric layer (e.g., ABL top). Under a proper refraction–reflection condition, the layer can act as a duct to channel the RO propagation to reach a farther distance. Sokolovskiy et al. [22] studied the RO ducting effect with numerical model simulations and found that the length of ducting could play a key role in the deep HSL RO signals. The longer the duct length, the deeper the RO signal can reach. The simulations also showed that ducting can induce a temporary loss of RO signals or a U-shape in the SNR profile due to multi-path interference. The U-shape essentially bifurcates the RO signal, as illustrated by two blue lines Figure 1, and induces a minimal SNR before the signal re-emerges at a lower HSL.
- Diffraction effect: Like the light passing through a sharp edge object, the RO signal also experiences diffraction effects as it passes through a sharp layer such as ABL. The diffraction fringes are present in the RO signal amplitudes at deep HSL, as simulated from a sharp ABL [17,18,19,20,21,27]. Consequently, modeling with wave optics must be employed to comprehend the SNR signals in these situations. The RO diffraction effect is more pronounced in the object without an atmosphere, such as the lunar occultation [28], but it is often overwhelmed by the other aforementioned effects when an atmosphere is present.
2.2. GNSS-RO Radiometry
2.3. Geometric and Wave Optics
2.4. SRO on HSL Coordinate
2.5. SRO on Coordinate
2.6. Data Quality Control
2.7. MABL Sampling
3. Results
3.1. SRO Sensitivity to MABL H2O
3.2. Diurnal Variations of SRO
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. GNSS-RO SNR Variability and Receiver Noise





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LEO Satellites | Mission Lifetime | Init, Final Alt (km) | Sun-Syn (Asc ECT (1)) | Lat Coverage | Top RO Ht (km) | Tracked GNSS | Receiver Noise | |
|---|---|---|---|---|---|---|---|---|
| Setting | Rising | |||||||
| CHAMP | 2001–2008 | 450,330 | varying | 90° S/N | 140 | G | 11 | - |
| COSMIC-1 (2) constellation | 2006–2020 | 525,810 | varying | 90° S/N | 130 | G | 11 | 9 |
| MetOp-A | 2006–2021 | 820 | 19:00 (3) | 90° S/N | 90 | G | 14 | 11 |
| MetOp-B | 2012– | 820 | 19:00 | 90° S/N | 90 | G | 14 | 29 |
| MetOp-C | 2018– | 820 | 19:00 | 90° S/N | 90 | G | 14 | 12 |
| KOMPSAT-5 | 2015– | 560 | 06:00 | 90° S/N | 135 | G | 12 | 10 |
| TSX | 2009– | 520 | 18:00 | 90° S/N | 135 | G | 11 | - |
| TDX | 2016– | 520 | 18:00 | 90° S/N | 135 | G | - | 9 |
| GRACE | 2007–2017 | 475,300 | varying | 90° S/N | 140 | G | 10 | - |
| COSMIC-2 (4) constellation | 2019– | 715,545 | varying | 44° S/N | 90–130 | G R | 18 14 | 18 14 |
| PAZ | 2018– | 520 | 18:00 | 90° S/N | 135 | G | 10 | - |
| Spire (5) Constellation | 2018– | varying | varying | 90° S/N | 170–400 | G R E | 9 18 8 | 9 17 8 |
Appendix B. GNSS-RO Grazing Reflection Features






Appendix C. Excess Phase, Bending Angle, and Refractivity
Appendix D. GNSS Signal Jamming


References
- Stull, B.R. An Introduction to Boundary Layer Meteorology; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Bretherton, C.S.; Uttal, T.; Fairall, C.W.; Yuter, S.; Weller, R.; Baumgardner, D.; Comstock, K.; Wood, R.; Raga, G. The EPIC 2001 stratocumulus study. Bull. Am. Meteor. Soc. 2004, 85, 967–977. [Google Scholar] [CrossRef]
- Teixeira, J.; Stevens, B.; Bretherton, C.S.; Cederwall, R.; Doyle, J.D.; Golaz, J.C.; Holtslag, A.A.M.; Klein, S.A.; Lundquist, J.K.; Randall, D.A.; et al. The parameterization of the atmospheric boundary layer: A view from just above the inversion. Bull. Am. Meteor. Soc. 2008, 89, 453–458. [Google Scholar] [CrossRef]
- Pincus, R.; Winker, D.; Bony, S.; Stevens, B. Shallow Clouds, Water Vapor, Circulation, and Climate Sensitivity; Space Sciences Series of ISSI; Springer: Berlin/Heidelberg, Germany, 2017; Volume 65, ISBN 978-3-319-77272-1. [Google Scholar]
- Bony, S.; Dufresne, J.L. Marine boundary layer clouds at the heart of tropical cloud feedback uncertainties in climate models. Geophys. Res. Lett. 2005, 32, L20806. [Google Scholar] [CrossRef]
- Wentz, F.J.; Meissner, T. AMSR Ocean Algorithm; Version 2; Technical Report 121599A-1; Remote Sensing Systems: Santa Rosa, CA, USA, 2000; p. 66. Available online: http://eospso.gsfc.nasa.gov/sites/default/files/atbd/atbd-amsr-ocean.pdf (accessed on 30 April 2022).
- Gao, B.-C.; Kaufman, Y.J. Water vapor retrievals using Moderate Resolution Imaging Spectroradiometer (MODIS) near-infrared channels. J. Geophys. Res. 2003, 108, 2156–2202. [Google Scholar] [CrossRef]
- Millan, L.; Lebsock, M.; Fishbein, E.; Kalmus, P.; Teixeira, J. Quantifying marine boundary layer water vapor beneath low clouds with near-infrared and microwave imagery. J. Appl. Meteorol. Clim. 2016, 55, 213–225. [Google Scholar] [CrossRef]
- Ao, C.O.; Waliser, D.E.; Chan, S.K.; Li, J.-L.; Tian, B.; Xie, F.; Mannucci, A.J. Planetary boundary layer heights from GPS radio occultation refractivity and humidity profiles. J. Geophys. Res. 2012, 117, D16117. [Google Scholar] [CrossRef]
- Chan, K.M.; Wood, R. The seasonal cycle of planetary boundary layer depth determined using COSMIC radio occultation data. J. Geophys. Res. Atmos. 2013, 118, 12422–12434. [Google Scholar] [CrossRef]
- Ho, S.P.; Peng, L.; Anthes, R.A.; Kuo, Y.H.; Lin, H.C. Marine boundary layer heights and their longitudinal, diurnal, and interseasonal variability in the southeastern Pacific using COSMIC, CALIOP, and radiosonde data. J. Clim. 2015, 28, 2856–2872. [Google Scholar] [CrossRef]
- Ganethan, M.; Wu, D.L. An investigation of the Arctic inversion using COSMIC RO observations. J. Geophys. Res. Atmos. 2015, 120, 9338–9351. [Google Scholar] [CrossRef]
- Ho, S.; Zhou, X.; Kuo, Y.H.; Hunt, D.; Wang, J. Global evaluation of radiosonde water vapor systematic biases using GPS radio occultation from COSMIC and ECMWF analysis. Remote Sens. 2010, 2, 1320. [Google Scholar] [CrossRef]
- Sun, B.; Reale, A.; Seidel, D.J.; Hunt, D.C. Comparing radiosonde and COSMIC atmospheric profile data to quantify differences among radiosonde types and the effects of imperfect collocation on comparison statistics. J. Geophys. Res. Atmos. 2010, 115, 1–16. [Google Scholar] [CrossRef]
- Wang, B.R.; Liu, X.Y.; Wang, J.K. Assessment of COSMIC radio occultation retrieval product using global radiosonde data. Atmos. Meas. Tech. 2013, 6, 1073–1083. [Google Scholar] [CrossRef]
- Ao, C.O.; Meehan, T.K.; Hajj, G.A.; Mannucci, A.J.; Beyerle, G. Lower troposphere refractivity bias in GPS occultation retrievals. J. Geophys. Res. 2003, 108, 4577. [Google Scholar] [CrossRef]
- Xie, F.; Wu, D.L.; Ao, C.O.; Kursinski, E.R.; Mannucci, A.J.; Syndergaard, S. Super-refraction effects on GPS radio occultation refractivity in marine boundary layers. Geophys. Res. Lett. 2010, 37, L11805. [Google Scholar] [CrossRef]
- Poli, P.; Healy, S.B.; Dee, D.P. Assimilation of global positioning system radio occultation data in the ECMWF ERA-Interim reanalysis. Q. J. R. Meteor. Soc. 2010, 136, 1972–1990. [Google Scholar] [CrossRef]
- Tyler, G.L. Voyager Radio Science Observations of Neptune and Triton. Science 1989, 246, 1466. [Google Scholar] [CrossRef]
- Hajj, G.A.; Ao, C.O.; Iijima, B.A.; Kuang, D.; Kursinski, E.R.; Mannucci, A.J.; Meehan, T.K.; Romans, L.J.; de la TorreJuarez, M.; Yunck, T.P. CHAMP and SAC-C atmospheric occultation results and intercomparisons. J. Geophys. Res. 2004, 109, D06109. [Google Scholar] [CrossRef]
- Melbourne, W.G. Radio Occultations Using Earth Satellites: A Wave Theory Treatment; Monograph 6, Deep Space Communications and Navigation Series; Yuen, J.H., Ed.; Jet Propulsion Laboratory: Pasadena, CA, USA; California Institute of Technology: Pasadena, CA, USA, 2004; p. 610. [Google Scholar]
- Sokolovskiy, S.; Schreiner, W.; Zeng, Z.; Hunt, D.; Lin, Y.-C.; Kuo, Y.-H. Observation, analysis, and modeling of deep radio occultation signals: Effects of tropospheric ducts and interfering signals. Radio Sci. 2014, 49, 954–970. [Google Scholar] [CrossRef]
- Guo, P.; Kuo, Y.-H.; Sokolovskiy, S.V.; Lenschow, D.H. Estimating atmospheric boundary layer depth using COSMIC radio occultation data. J. Atmos. Sci. 2011, 68, 1703–1713. [Google Scholar] [CrossRef]
- Aparicio, J.M.; Cardellach, E.; Rodríguez, H. Information content in reflected signals during GPS Radio Occultation observations. Atmos. Meas. Tech. 2018, 11, 1883–1900. [Google Scholar] [CrossRef]
- Semmling, A.M.; Rösel, A.; Divine, D.V.; Gerland, S.; Stienne, G.; Reboul, S.; Ludwig, M.; Wickert, J.; Schuh, H. Sea-ice concentration derived from GNSS reflection measurements in fram strait. IEEE Trans. Geosci. Remote Sens. 2019, 57, 10350–10361. [Google Scholar] [CrossRef]
- Sokolovskiy, S. Effect of superrefraction on inversions of radio occultation signals in the lower troposphere. Radio Sci. 2003, 38, 1058. [Google Scholar] [CrossRef]
- Karayel, E.; Hinson, D. Sub-Fresnel Scale Vertical Resolution in Atmospheric Profiles from Radio Occultation. Radio Sci. 1997, 32, 411–423. [Google Scholar] [CrossRef]
- Hazard, C.; Mackey, M.; Shimmins, A. Investigation of the Radio Source 3C 273 by the Method of Lunar Occultations. Nature 1963, 197, 1037–1039. [Google Scholar] [CrossRef]
- Kursinski, E.R.; Hajj, G.A.; Schofield, J.T.; Linfield, R.P.; Hardy, K.R. Observing Earth’s atmosphere with radio occultation measurements using the global positioning system. J. Geophys. Res. 1997, 102, 23429–23465. [Google Scholar] [CrossRef]
- Zeng, Z.; Sokolovskiy, S.; Schreiner, W.S.; Hunt, D. Representation of vertical atmospheric structures by radio occultation observations in the upper troposphere and lower stratosphere: Comparison to high-resolution radiosonde profiles. Terr. Atmos. Ocean. Sci. 2019, 36, 655–670. [Google Scholar] [CrossRef]
- Zeng, Z.; Sokolovskiy, S. Effect of sporadic E clouds on GPSradio occultation signals. Geophys. Res. Lett. 2010, 37, L18817. [Google Scholar] [CrossRef]
- Esterhuizen, S.; Franklin, G.; Hurst, K.; Mannucci, A.; Meehan, T.; Webb, F.; Young, L. TriG—A GNSS Precise Orbit and Radio Occultation Space Receiver. In Proceedings of the 22nd International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2009), Savannah, GA, USA, 22–25 September 2009; pp. 1442–1446. [Google Scholar]
- Meehan, T.K.; Tien, J.; Roberts, M.; Ao, C.; Wang, E. Performance of the TGRS Radio Occultation Instrument. In Proceedings of the 100th American Meteorological Society Annual Meeting, Boston, MA, USA, 12–16 January 2020; Available online: http://hdl.handle.net/2014/52393 (accessed on 30 April 2022).
- Xie, F.; Wu, D.L.; Ao, C.O.; Mannucci, A.J.; Kursinski, E.R. Advances and limitations of atmospheric boundary layer observations with GPS occultation over southeast Pacific Ocean. Atmos. Chem. Phys. 2012, 12, 903–918. [Google Scholar] [CrossRef]
- Sandu, I.; Stevens, B. On the factors modulating the stratocumulus to cumulus transitions. J. Atmos. Sci. 2011, 68, 1865–1881. [Google Scholar] [CrossRef]
- Johnston, B.R.; Randel, W.J.; Sjoberg, J.P. Evaluation of Tropospheric Moisture Characteristics Among COSMIC-2, ERA5 and MERRA-2 in the Tropics and Subtropics. Remote Sens. 2021, 13, 880. [Google Scholar] [CrossRef]
- Kalmus, P.; Wong, S.; Teixeira, J. The Pacific subtropical cloud transition: A MAGIC assessment of AIRS and ECMWF thermodynamic structure. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1586–1590. [Google Scholar] [CrossRef]
- Rozendaal, M.A.; Leovy, C.B.; Klein, S.A. An observational study of the diurnal cycle of marine stratiform cloud. J. Clim. 1995, 8, 1795–1809. [Google Scholar] [CrossRef]
- Wood, R.; Bretherton, C.S.; Hartmann, D.L. Diurnal cycle of liquid water path over the subtropical and tropical oceans. Geophys. Res. Lett. 2002, 29, 2092. [Google Scholar] [CrossRef]
- Garreaud, R.D.; Munoz, R. The diurnal cycle in circulation and cloudiness over the subtropical southeast Pacific: A. modeling study. J. Clim. 2004, 17, 1699–1710. [Google Scholar] [CrossRef]
- Burleyson, C.D.; Yuter, S. Patterns of diurnal marine stratocumulus cloud fraction variability. J. Appl. Meteorol. Climatol. 2015, 54, 847–866. [Google Scholar] [CrossRef]
- Sherwood, S.C.; Bony, S.; Boucher, O.; Bretherton, C.; Forster, P.M.; Gregory, J.M.; Stevens, B. Adjustments in the forcing-feedback framework for understanding climate change. Bull. Am. Meteorol. Soc. 2015, 96, 217–228. [Google Scholar] [CrossRef]
- Beyerle, G.; Hocke, K.; Wickert, J.; Schmidt, T.; Marquardt, C.; Reigber, C. GPS radio occultations with CHAMP: A radio holographic analysis of GPS signal propagation in the troposphere and surface reflections. J. Geophys. Res. 2002, 107, ACL27-1–ACL27-14. [Google Scholar] [CrossRef]
- Gorbunov, M.E.; Cardellach, E.; Lauritsen, K.B. Reflected ray retrieval from radio occultation data using radio holographic filtering of wave fields in ray space. Atmos. Meas. Tech. 2018, 11, 1181–1191. [Google Scholar] [CrossRef]
- Chen, W.; Xiong, Y.; Li, X.; Zhao, B.; Zhang, R.; Xu, S. Preliminary Validation of Surface Reflections from Fengyun-3C Radio Occultation Data. Remote Sens. 2021, 13, 1980. [Google Scholar] [CrossRef]
- Murrian, M.J.; Narula, L.; Iannucci, P.A.; Budzien, S.A.; O’Hanlon, B.W.; Humphreys, T.E. GNSS Interference Monitoring from Low Earth Orbit. J. Inst. Navig. 2020, 68, 673–685. [Google Scholar]
- Murrian, M.J.; Narula, L.; Iannucci, P.A.; Budzien, S.A.; O’Hanlon, B.W.; Psiaki, M.L.; Humphreys, T.E. First results from three years of GNSS interference monitoring from low Earth orbit. Navig. J. Inst. Navig. 2021, 68, 673–685. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, D.L.; Gong, J.; Ganeshan, M. GNSS-RO Deep Refraction Signals from Moist Marine Atmospheric Boundary Layer (MABL). Atmosphere 2022, 13, 953. https://doi.org/10.3390/atmos13060953
Wu DL, Gong J, Ganeshan M. GNSS-RO Deep Refraction Signals from Moist Marine Atmospheric Boundary Layer (MABL). Atmosphere. 2022; 13(6):953. https://doi.org/10.3390/atmos13060953
Chicago/Turabian StyleWu, Dong L., Jie Gong, and Manisha Ganeshan. 2022. "GNSS-RO Deep Refraction Signals from Moist Marine Atmospheric Boundary Layer (MABL)" Atmosphere 13, no. 6: 953. https://doi.org/10.3390/atmos13060953
APA StyleWu, D. L., Gong, J., & Ganeshan, M. (2022). GNSS-RO Deep Refraction Signals from Moist Marine Atmospheric Boundary Layer (MABL). Atmosphere, 13(6), 953. https://doi.org/10.3390/atmos13060953