In Situ Water Quality Measurements Using an Unmanned Aerial Vehicle (UAV) System


Abstract
:1. Introduction
2. Materials and Methods
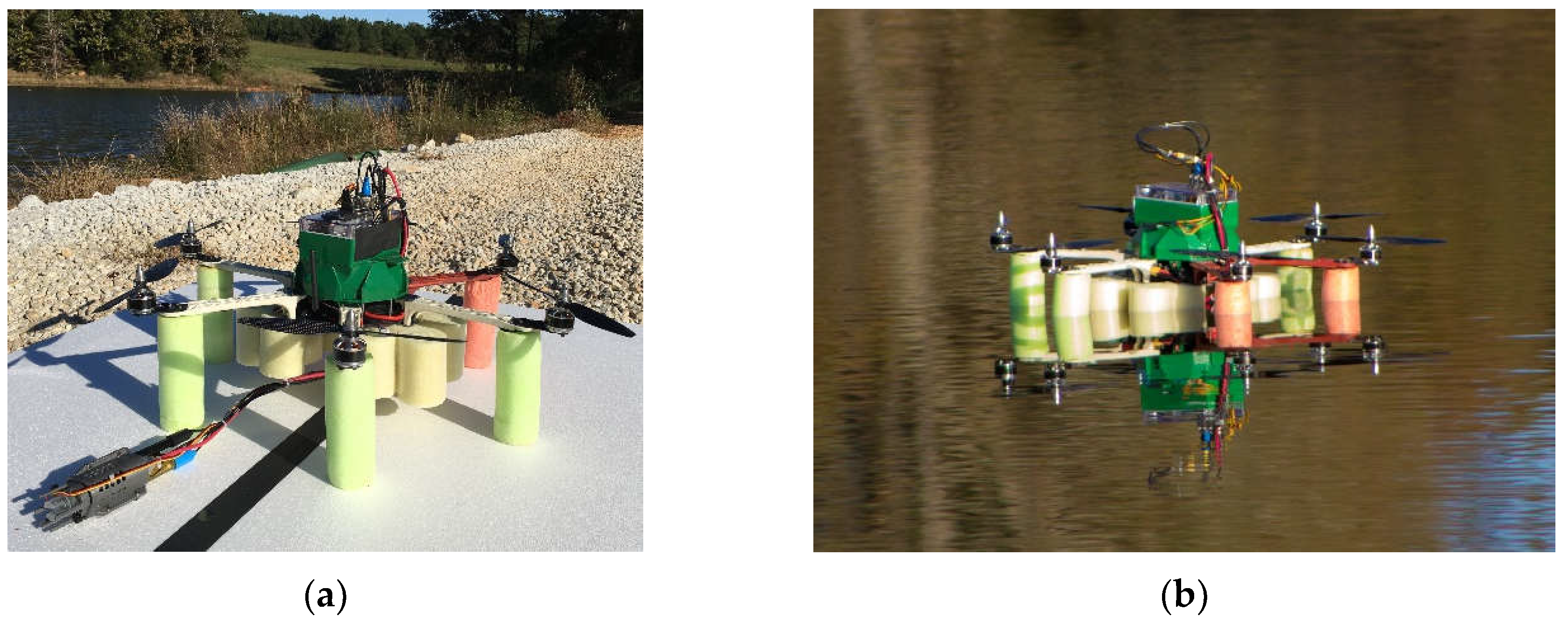
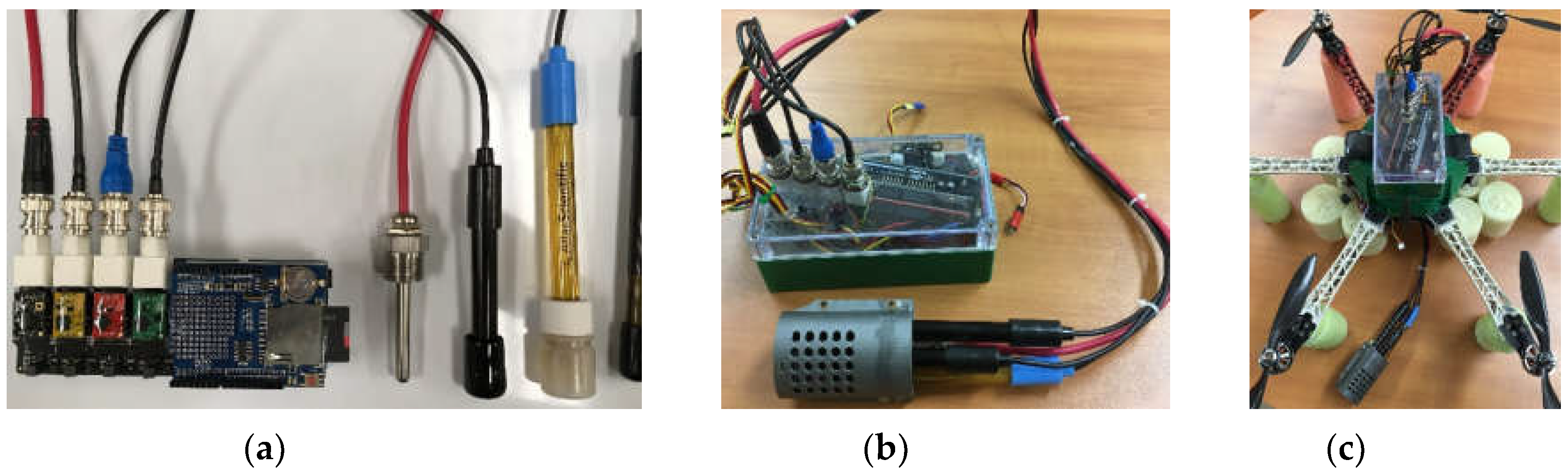
2.1. Design, Control, and Navigation
2.2. Accuracy Assessment
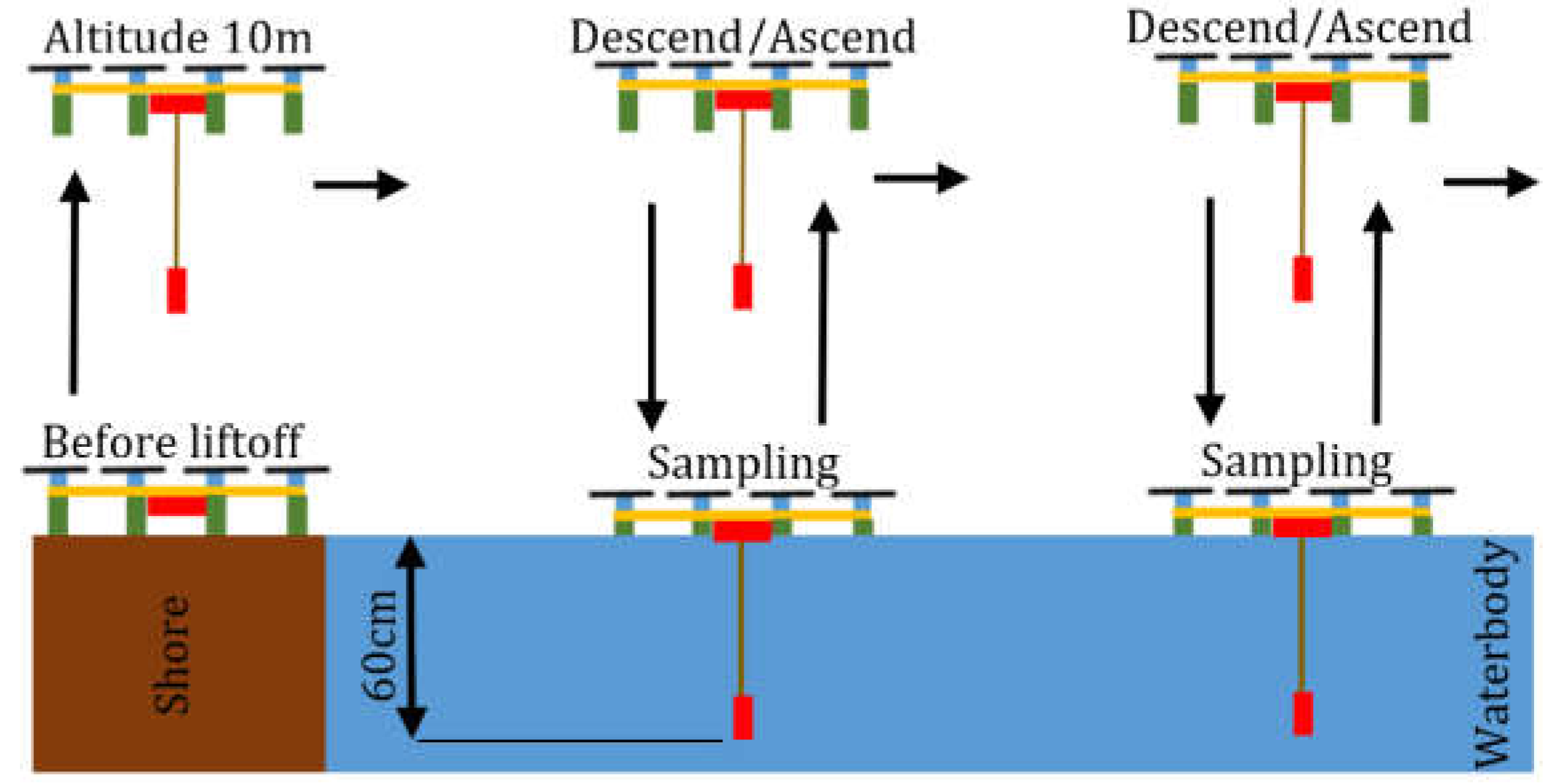
2.3. In Situ Data Collection with UAMS
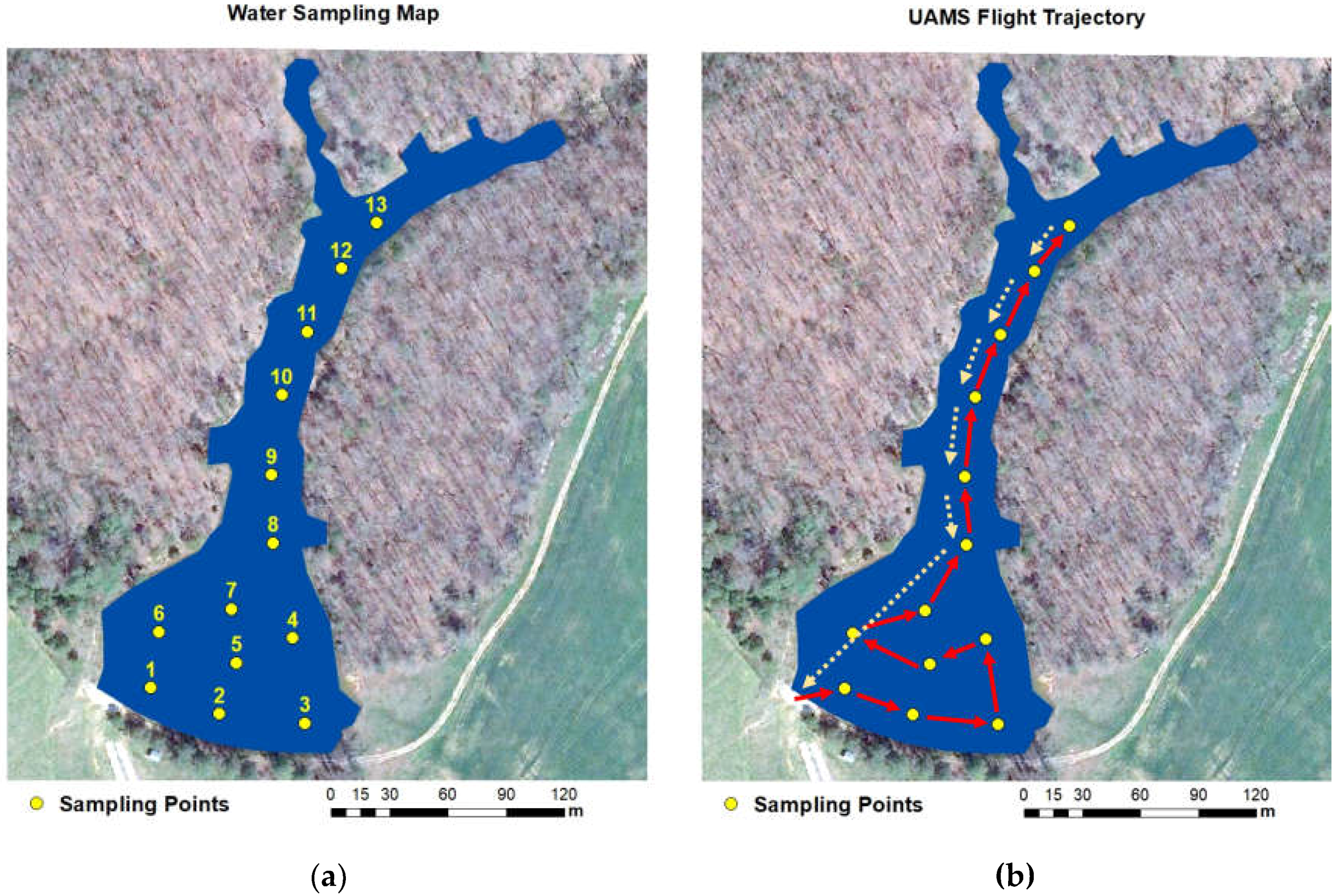
2.4. Experiment Site
3. Results
3.1. Accuracy Assessment Results
3.2. In Situ Water Quality Measurements Using the UAMS
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xu, Z.; Dong, Q.; Otieno, B.; Liu, Y.; Williams, I.; Cai, D.; Li, Y.; Lei, Y.; Li, B. Real-time in situ sensing of multiple water quality related parameters using micro-electrode array (mea) fabricated by inkjet-printing technology (ipt). Sens. Actuators B Chem. 2016, 237, 1108–1119. [Google Scholar] [CrossRef]
- Thomas, K.V.; Hurst, M.R.; Matthiessen, P.; Sheahan, D.; Williams, R.J. Toxicity characterisation of organic contaminants in stormwaters from an agricultural headwater stream in south east england. Water Res. 2001, 35, 2411–2416. [Google Scholar] [CrossRef]
- Kaizu, Y.; Iio, M.; Yamada, H.; Noguchi, N. Development of unmanned airboat for water-quality mapping. Biosyst. Eng. 2011, 109, 338–347. [Google Scholar] [CrossRef]
- Liu, R.; Xu, F.; Zhang, P.; Yu, W.; Men, C. Identifying non-point source critical source areas based on multi-factors at a basin scale with swat. J. Hydrol. 2016, 533, 379–388. [Google Scholar] [CrossRef]
- Ma, Y.; Egodawatta, P.; McGree, J.; Liu, A.; Goonetilleke, A. Human health risk assessment of heavy metals in urban stormwater. Sci. Total Environ. 2016, 557–558, 764–772. [Google Scholar] [CrossRef] [PubMed]
- Neumann, M.; Liess, M.; Schulz, R. A qualitative sampling method for monitoring water quality in temporary channels or point sources and its application to pesticide contamination. Chemosphere 2003, 51, 509–513. [Google Scholar] [CrossRef]
- Glasgow, H.B.; Burkholder, J.M.; Reed, R.E.; Lewitus, A.J.; Kleinman, J.E. Real-time remote monitoring of water quality: A review of current applications, and advancements in sensor, telemetry, and computing technologies. J. Exp. Mar. Biol. Ecol. 2004, 300, 409–448. [Google Scholar] [CrossRef]
- Weiss, P.T.; Erickson, A.J.; Gulliver, J.S.; Hozalski, R.M.; Mohseni, O.; Herb, W.R. Stormwater Treatment: Assessment and Maintenance; University of Minnesota, st. Anthony Falls Laboratory: Minneapolis, MN, USA, 2010. [Google Scholar]
- Blaas, H.; Kroeze, C. Excessive nitrogen and phosphorus in european rivers: 2000–2050. Ecol. Indic. 2016, 67, 328–337. [Google Scholar] [CrossRef]
- McGowan, S. Chapter 2—Algal blooms a2—Shroder, john f. In Biological and Environmental Hazards, Risks, and Disasters; Sivanpillai, R., Ed.; Academic Press: Boston, MA, USA, 2016; pp. 5–43. [Google Scholar]
- Van der Merwe, D. Chapter 31—Cyanobacterial (blue-green algae) toxins a2—Gupta, ramesh c. In Handbook of Toxicology of Chemical Warfare Agents, 2nd ed.; Academic Press: Boston, MA, USA, 2015; pp. 421–429. [Google Scholar]
- Schaeffer, B.A.; Schaeffer, K.G.; Keith, D.; Lunetta, R.S.; Conmy, R.; Gould, R.W. Barriers to adopting satellite remote sensing for water quality management. Inter. J. Remote Sens. 2013, 34, 7534–7544. [Google Scholar] [CrossRef]
- Wernersson, A.-S.; Carere, M.; Maggi, C.; Tusil, P.; Soldan, P.; James, A.; Sanchez, W.; Dulio, V.; Broeg, K.; Reifferscheid, G.; et al. The european technical report on aquatic effect-based monitoring tools under the water framework directive. Environ. Sci. Eur. 2015, 27, 7. [Google Scholar] [CrossRef] [Green Version]
- Winkelbauer, A.; Fuiko, R.; Krampe, J.; Winkler, S. Crucial elements and technical implementation of intelligent monitoring networks. Water Sci. Technol. 2014, 70, 1926–1933. [Google Scholar] [CrossRef] [PubMed]
- Winkler, S.; Zessner, M.; Saracevic, E.; Fleischmann, N. Intelligent monitoring networks—Transformation of data into information for water management. Water Sci. Technol. 2008, 58, 317–322. [Google Scholar] [CrossRef] [PubMed]
- Tyler, A.N.; Hunter, P.D.; Carvalho, L.; Codd, G.A.; Elliott, J.A.; Ferguson, C.A.; Hanley, N.D.; Hopkins, D.W.; Maberly, S.C.; Mearns, K.J.; et al. Strategies for monitoring and managing mass populations of toxic cyanobacteria in recreational waters: A multi-interdisciplinary approach. Environ. Health 2009, 8, S11. [Google Scholar] [CrossRef] [PubMed]
- Gholizadeh, M.; Melesse, A.; Reddi, L. A comprehensive review on water quality parameters estimation using remote sensing techniques. Sensors 2016, 16, 1298. [Google Scholar] [CrossRef] [PubMed]
- Karimanzira, D.; Jacobi, M.; Pfuetzenreuter, T.; Rauschenbach, T.; Eichhorn, M.; Taubert, R.; Ament, C. First testing of an auv mission planning and guidance system for water quality monitoring and fish behavior observation in net cage fish farming. Inf. Proc. Agric. 2014, 1, 131–140. [Google Scholar] [CrossRef]
- Dunbabin, M.; Grinham, A.; Udy, J. An autonomous surface vehicle for water quality monitoring. In Proceedings of the 2009 Australasian Conference on Robotics and Automation (ACRA), Sydney, Australia, 2–4 December 2009; Australian Robotics and Automation Association: Sydney, Australia, 2009; pp. 1–6. [Google Scholar]
- Peters, C.B.; Zhan, Y.; Schwartz, M.W.; Godoy, L.; Ballard, H.L. Trusting land to volunteers: How and why land trusts involve volunteers in ecological monitoring. Biol. Conserv. 2017, 208, 48–54. [Google Scholar] [CrossRef]
- Partyka, M.L.; Bond, R.F.; Chase, J.A.; Atwill, E.R. Monitoring bacterial indicators of water quality in a tidally influenced delta: A sisyphean pursuit. Sci. Total Environ. 2017, 578, 346–356. [Google Scholar] [CrossRef] [PubMed]
- Ravalli, A.; Rossi, C.; Marrazza, G. Bio-inspired fish robot based on chemical sensors. Sens. Actuators B Chem. 2017, 239, 325–329. [Google Scholar] [CrossRef]
- Ardupilot. Installing Mission Planner. Available online: http://ardupilot.org/planner/docs/common-install-mission-planner.html (accessed on 25 May 2017).
- Gupta, A.K.; Jha, V.; Gupta, V.K. Design and development of remote controlled autonomous synchronic hexaroter aerial (asha) robot. Proced. Technol. 2014, 14, 51–58. [Google Scholar] [CrossRef]
- Koparan, C.; Bulent Koc, A. Unmanned aerial vehicle (uav) assisted water sampling. In 2016 ASABE Annual International Meeting; ASABE: St. Joseph, MI, USA, 2016; p. 1. [Google Scholar]
- Lynch, K.M.; Marchuk, N.; Elwin, M.L. Chapter 13–i2c communication. In Embedded Computing and Mechatronics with the Pic32; Newnes: Oxford, MS, USA, 2016; pp. 191–211. [Google Scholar]
- Koparan, C.; Koc, A.B. Unmanned Aerial Vehicle (Uav) Assisted Water Sampling. In Proceedings of the 2016 ASABE Annual International Meeting, Orlando, FA, USA, 17–20 July 2016; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2016; p. 1. [Google Scholar]
- Ardupilot. Mavlink Mission Command Messages. Available online: http://ardupilot.org/planner/docs/common-mavlink-mission-command-messages-mav_cmd.html (accessed on 10 December 2017).
- Ahmad, H.R.; Aziz, T.; Rehman, Z.R. Saifullah. Chapter 15—Spatial mapping of metal-contaminated soils a2—hakeem, khalid rehman. In Soil Remediation and Plants; Sabir, M., Öztürk, M., Mermut, A.R., Eds.; Academic Press: San Diego, CA, USA, 2015; pp. 415–431. [Google Scholar]
- Ritchie, J.C.; Zimba, P.V.; Everitt, J.H. Remote sensing techniques to assess water quality. Photogramm. Eng. Remote Sens. 2003, 69, 695–704. [Google Scholar] [CrossRef]
- Su, T.-C.; Chou, H.-T. Application of multispectral sensors carried on unmanned aerial vehicle (uav) to trophic state mapping of small reservoirs: A case study of tain-pu reservoir in kinmen, taiwan. Remote Sens. 2015, 7, 10078–10097. [Google Scholar] [CrossRef]
- Rivas Casado, M.; Ballesteros Gonzalez, R.; Wright, R.; Bellamy, P. Quantifying the effect of aerial imagery resolution in automated hydromorphological river characterisation. Remote Sens. 2016, 8, 650. [Google Scholar] [CrossRef]
- Ore, J.-P.; Elbaum, S.; Burgin, A.; Detweiler, C. Autonomous aerial water sampling. J. Field Robot. 2015, 32, 1095–1113. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Command Order | UAMS Position | Command | UAMS’s Response | Delay (s) | Latitude | Longitude | Altitude (m) |
|---|---|---|---|---|---|---|---|
| 1 | Home | TAKEOFF | Take off and ascend | 0 | 34.656951 | −82.820333 | 10 |
| 2 | Home | WAYPOINT | Navigate to WP1 | 0 | 34.656996 | −82.820065 | 10 |
| 3 | WP1 | LAND | Land at WP1 | 0 | 34.656996 | −82.820065 | 0 |
| 4 | WP1 | DO_SET_RELAY | Activate data recording | 0 | 34.656996 | −82.820065 | 0 |
| 5 | WP1 | WAYPOINT | Float for 60s | 60 | - | - | 0 |
| 6 | WP1 | TAKEOFF | Take off and ascend | 0 | 34.656996 | −82.820065 | 10 |
| 7 | WP1 | WAYPOINT | Navigate to WP2 | 0 | 34.656884 | −82.819681 | 10 |
| 8 | WP2 | LAND | Land at WP2 | 0 | 34.656884 | −82.819681 | 0 |
| 9 | WP2 | DO_SET_RELAY | Activate data recording | 0 | 34.656884 | −82.819681 | 0 |
| 10 | WP2 | WAYPOINT | Float for 60s | 60 | - | - | 0 |
| 11 | WP2 | TAKEOFF | Take off and ascend | 0 | 34.656884 | −82.819681 | 10 |
| 12 | WP2 | WAYPOINT | Navigate to WP3 | 0 | 34.656909 | −82.819256 | 10 |
| Quality Parameter | OSMM | CMM | Difference (%) | t Value (DF) | p Value | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| N | Mean | SD | N | Mean | SD | |||||
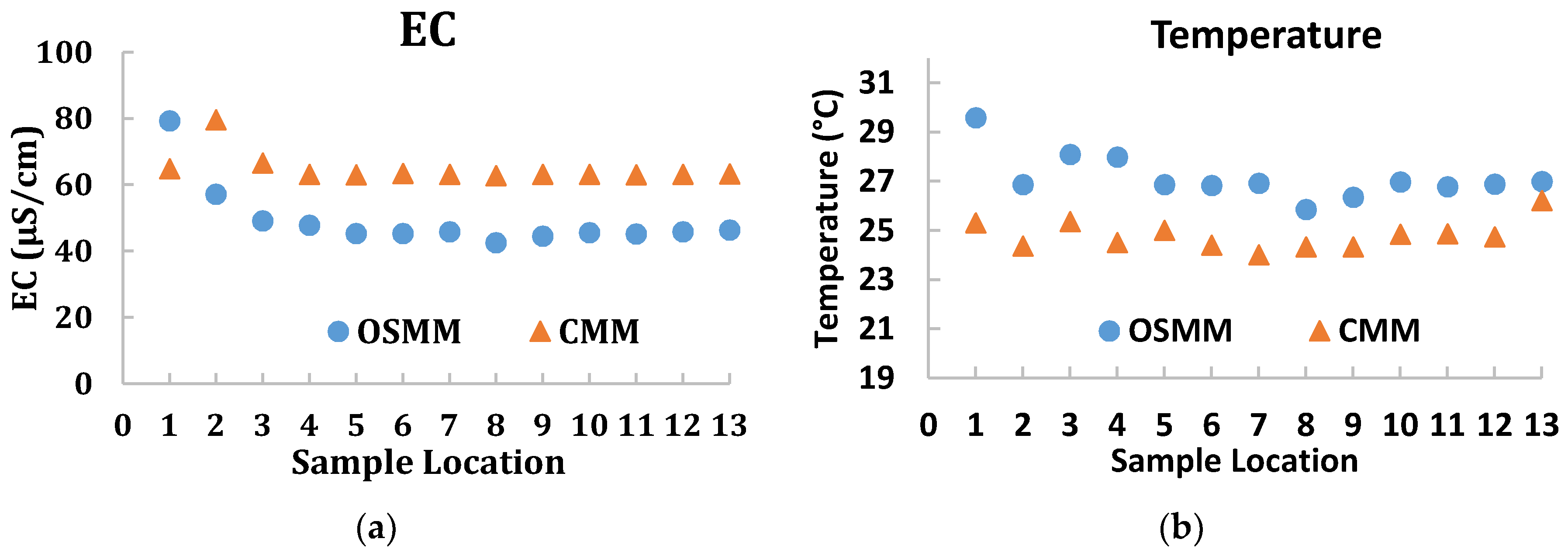
| Temp. (°C) | 195 | 27.15 | 0.93 | 39 | 24.79 | 0.58 | 2.33 | 9.7 (12) | 0.0001 *** | |
| EC (µS/cm) | 195 | 49.2 | 9.69 | 39 | 64.73 | 4.57 | 3.43 | 6.1 (12) | 0.0001 *** | |
| pH | 195 | 8.43 | 0.86 | 39 | 8.12 | 0.36 | 3.76 | 1.76 (12) | 0.05 | |
| DO (mg/L) | 195 | 9.05 | 0.27 | 39 | 8.87 | 0.49 | 2.08 | 1.34 (12) | 0.1 | |
| Quality Parameter | OSMM | CMM | Difference (%) | t Value (DF) | p Value | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| N | Mean | SD | N | Mean | SD | |||||
| Temp. (°C) | 195 | 24.82 | 0.93 | 39 | 24.79 | 0.58 | 0.13 | 0.13 (12) | 0.45 | |
| EC (µS/cm) | 195 | 66.95 | 9.69 | 39 | 64.73 | 4.57 | 3.43 | 0.87 (12) | 0.2 | |
| pH | 195 | 8.43 | 0.86 | 39 | 8.12 | 0.36 | 3.76 | 1.76 (12) | 0.05 | |
| DO (mg/L) | 195 | 9.05 | 0.27 | 39 | 8.87 | 0.49 | 2.08 | 1.34 (12) | 0.1 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koparan, C.; Koc, A.B.; Privette, C.V.; Sawyer, C.B. In Situ Water Quality Measurements Using an Unmanned Aerial Vehicle (UAV) System. Water 2018, 10, 264. https://doi.org/10.3390/w10030264
Koparan C, Koc AB, Privette CV, Sawyer CB. In Situ Water Quality Measurements Using an Unmanned Aerial Vehicle (UAV) System. Water. 2018; 10(3):264. https://doi.org/10.3390/w10030264
Chicago/Turabian StyleKoparan, Cengiz, Ali Bulent Koc, Charles V. Privette, and Calvin B. Sawyer. 2018. "In Situ Water Quality Measurements Using an Unmanned Aerial Vehicle (UAV) System" Water 10, no. 3: 264. https://doi.org/10.3390/w10030264
APA StyleKoparan, C., Koc, A. B., Privette, C. V., & Sawyer, C. B. (2018). In Situ Water Quality Measurements Using an Unmanned Aerial Vehicle (UAV) System. Water, 10(3), 264. https://doi.org/10.3390/w10030264