Development of a Regularized Dynamic System Response Curve for Real-Time Flood Forecasting Correction

Abstract
:1. Introduction
2. Materials and Methods
2.1. DSRC Method and Regularized DSRC Method (RDSRC)
2.1.1. DSRC Method and Its Flaws
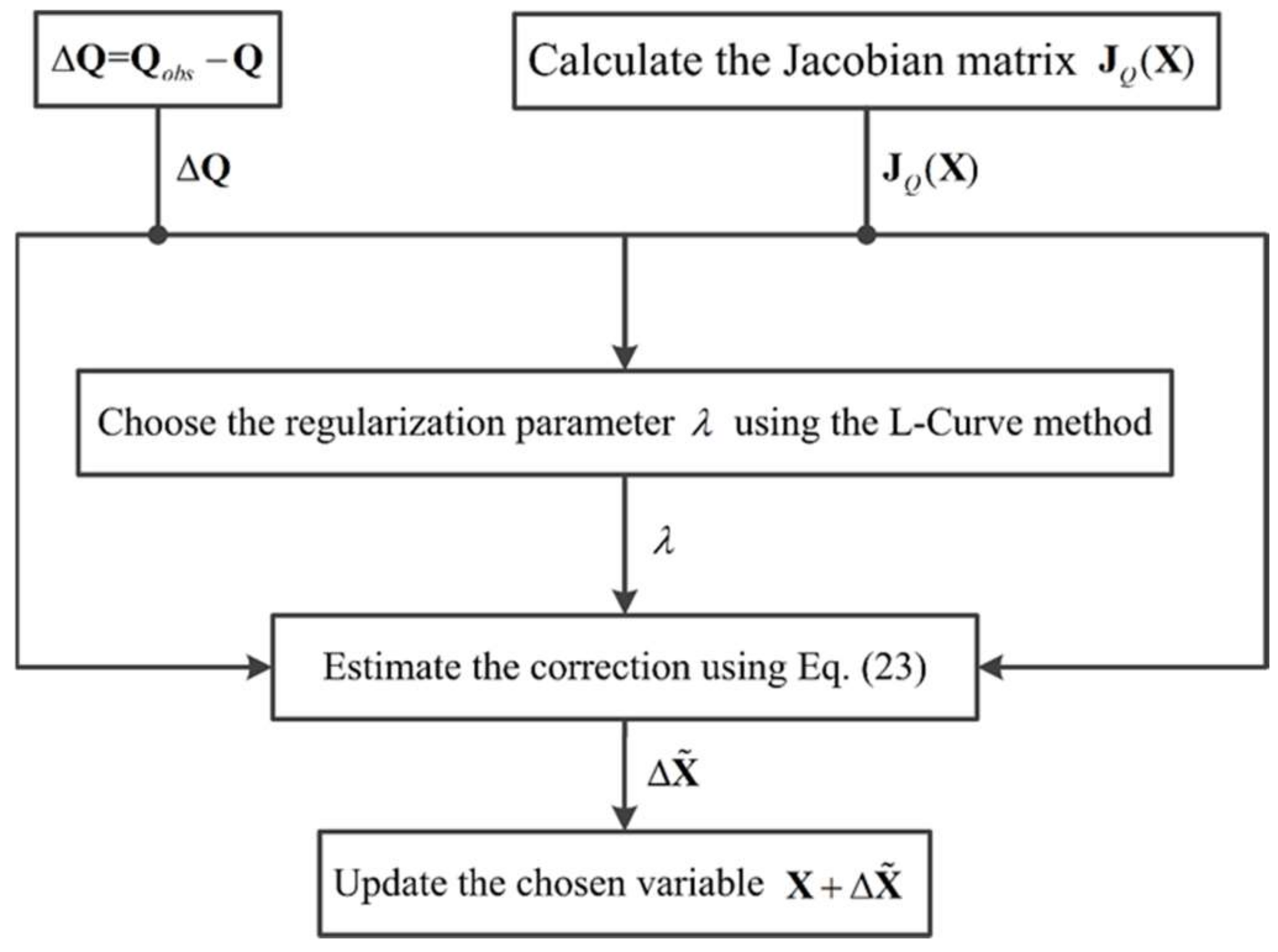
2.1.2. Regularization Techniques and RDSRC Method
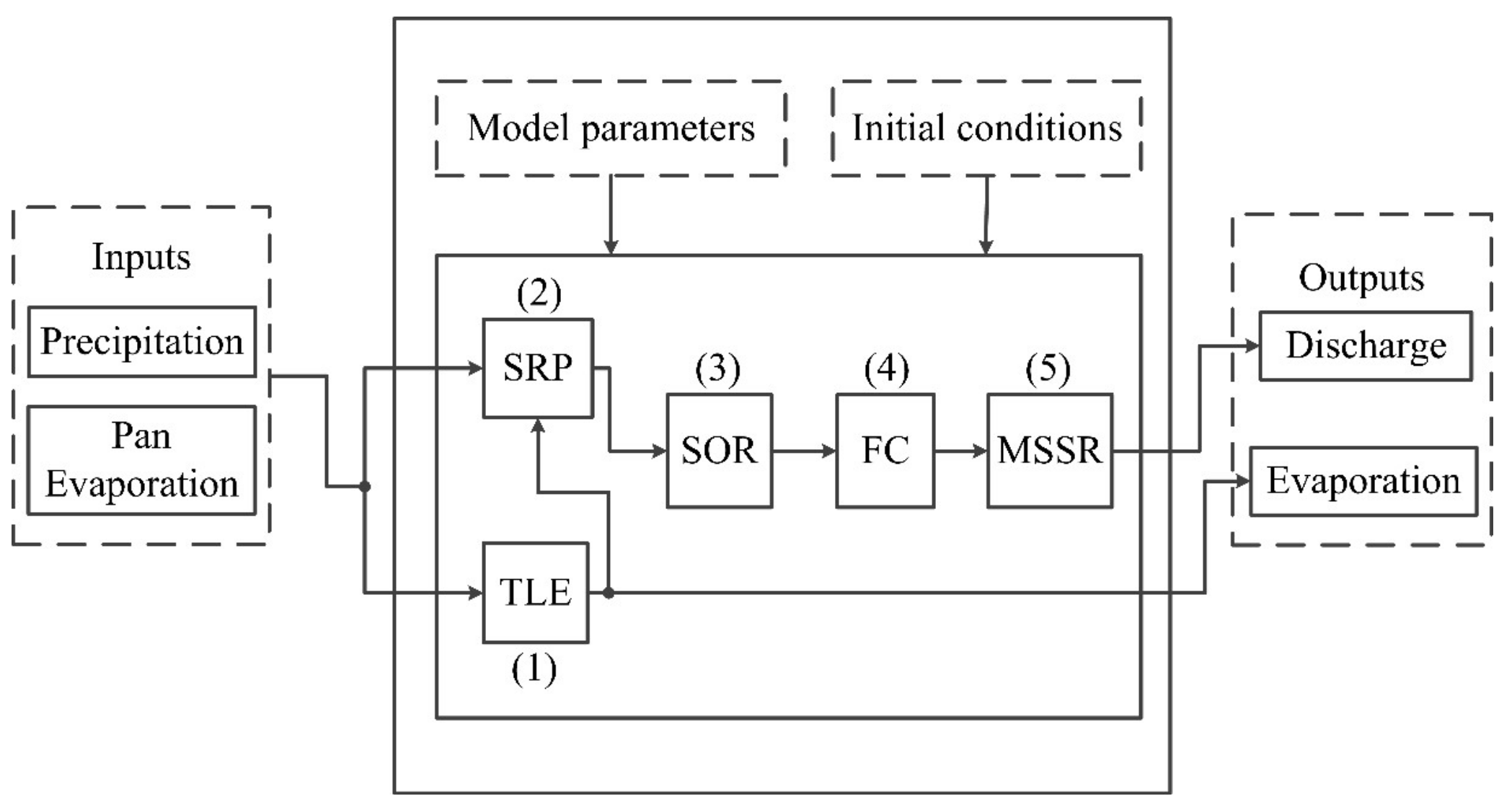
2.2. Hydrological Model
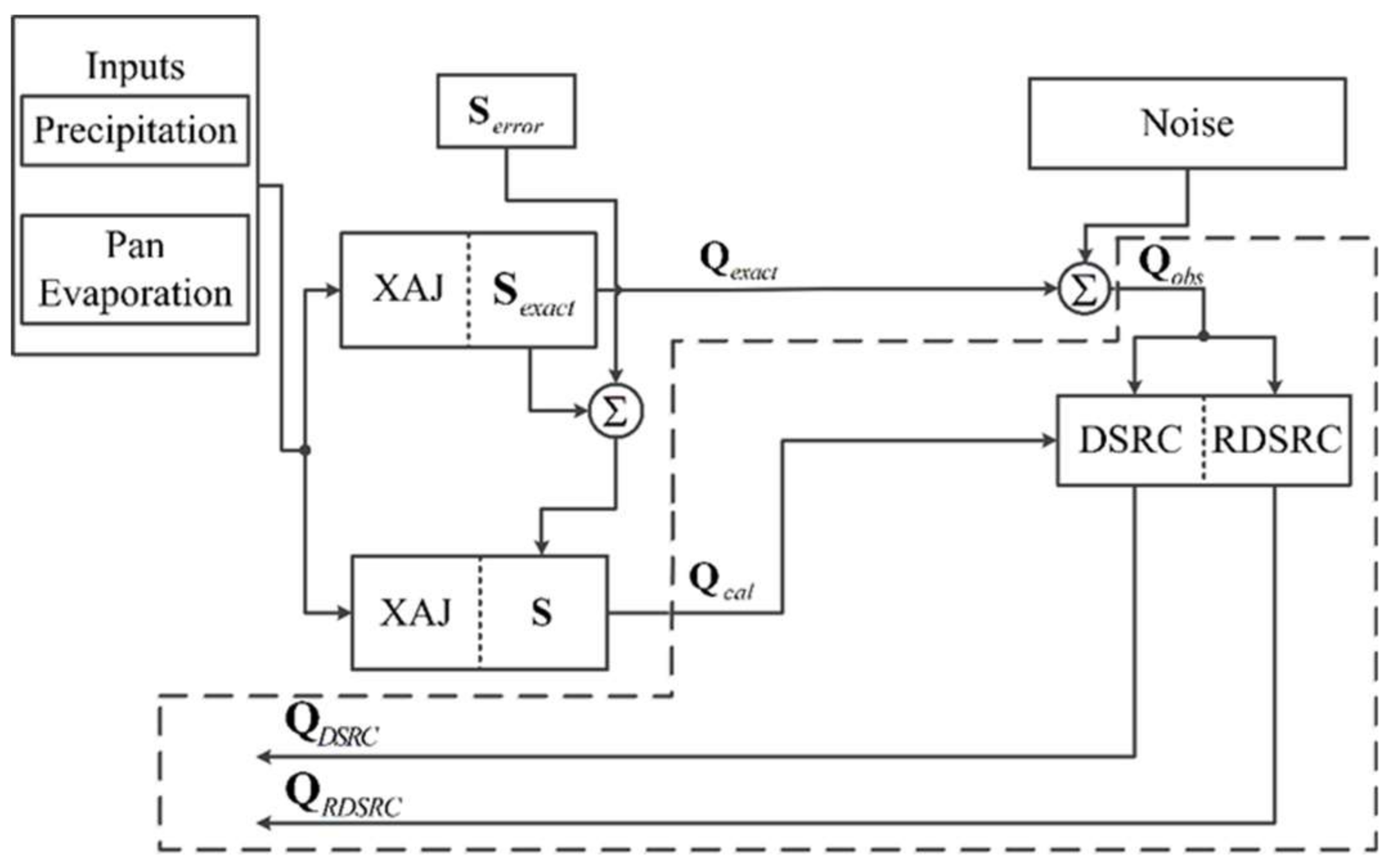
2.3. Synthetic Case
Data Basis
2.4. Real Case
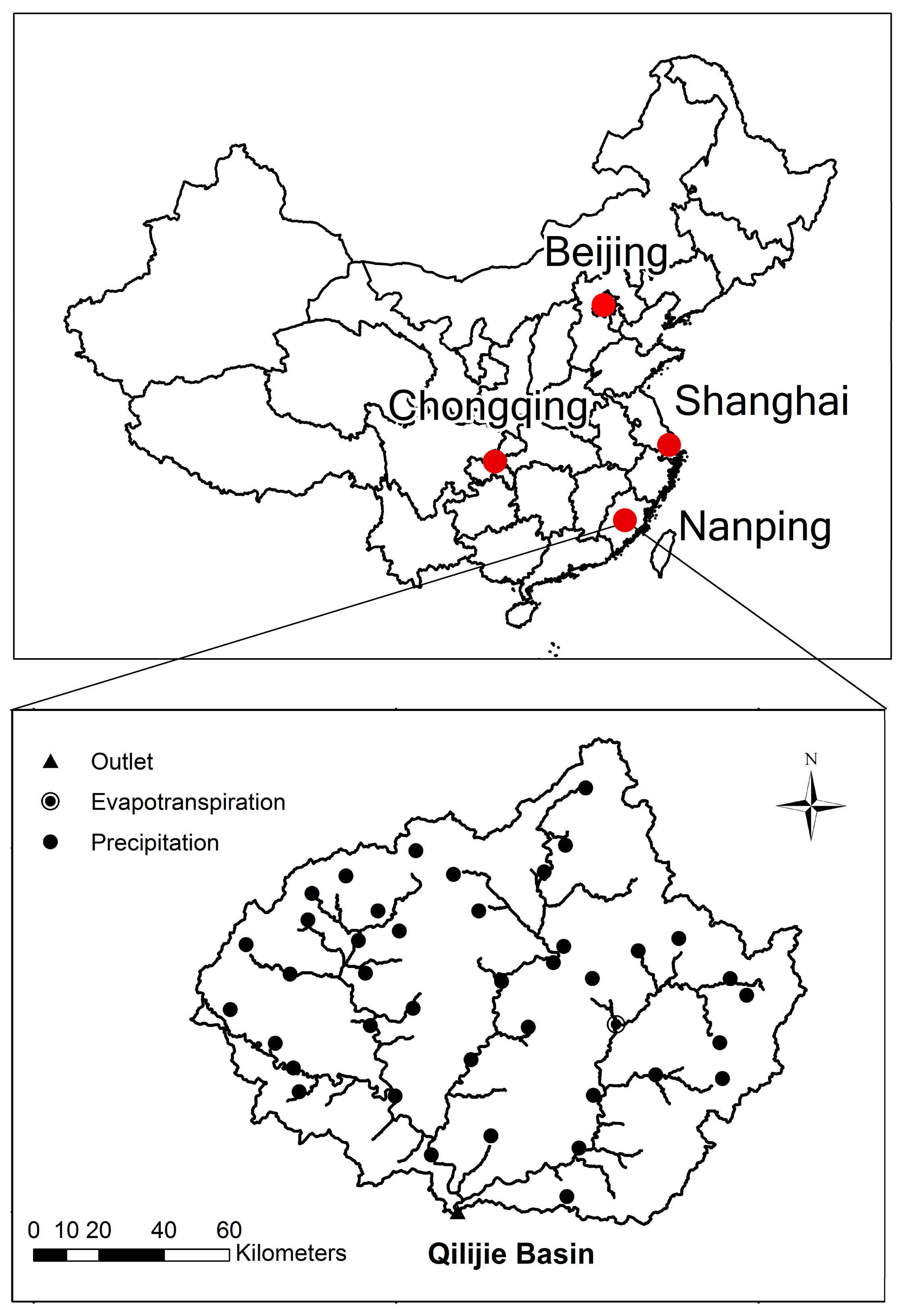
2.4.1. Study Area
2.4.2. Data Basis
3. Results and Discussion
3.1. Synthetic Case
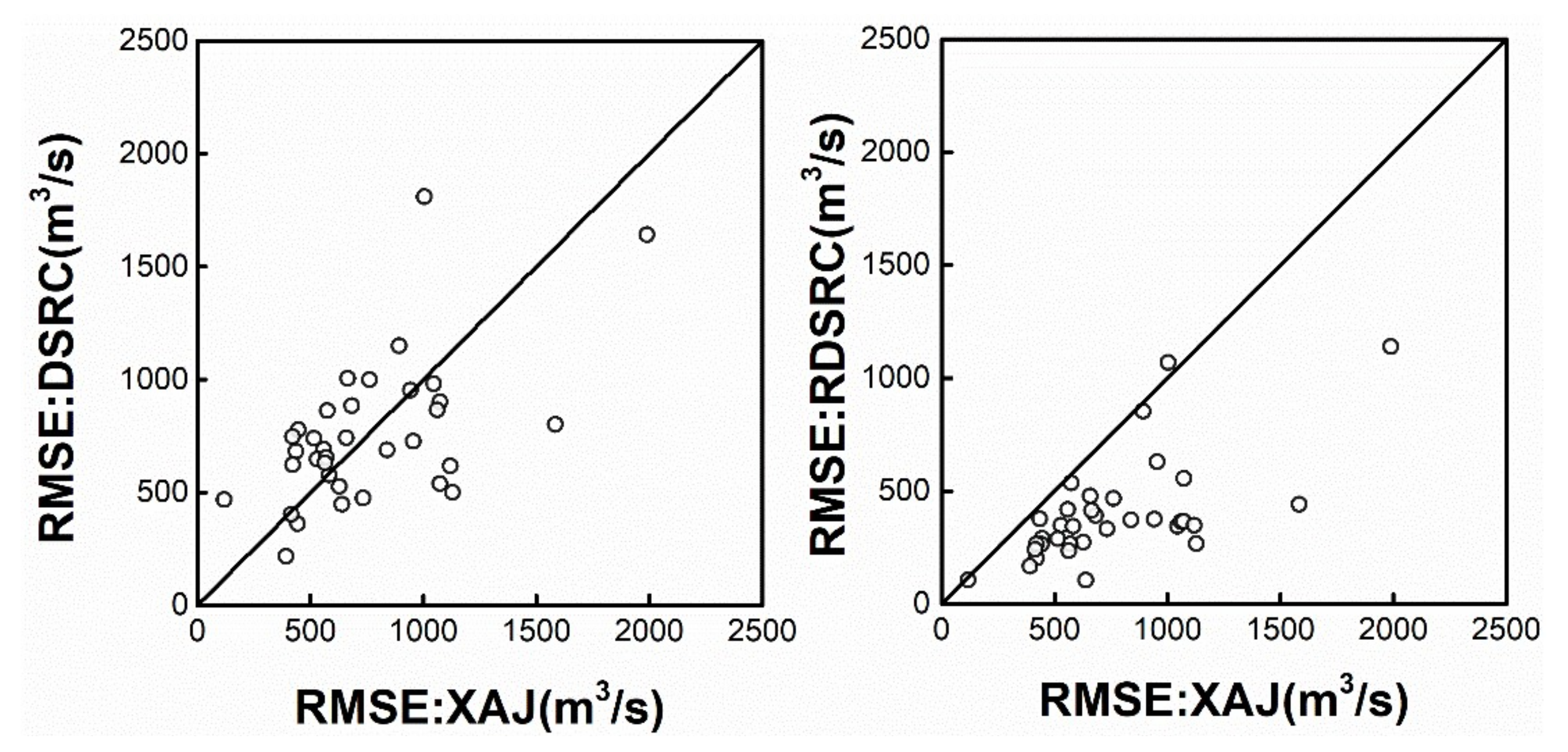
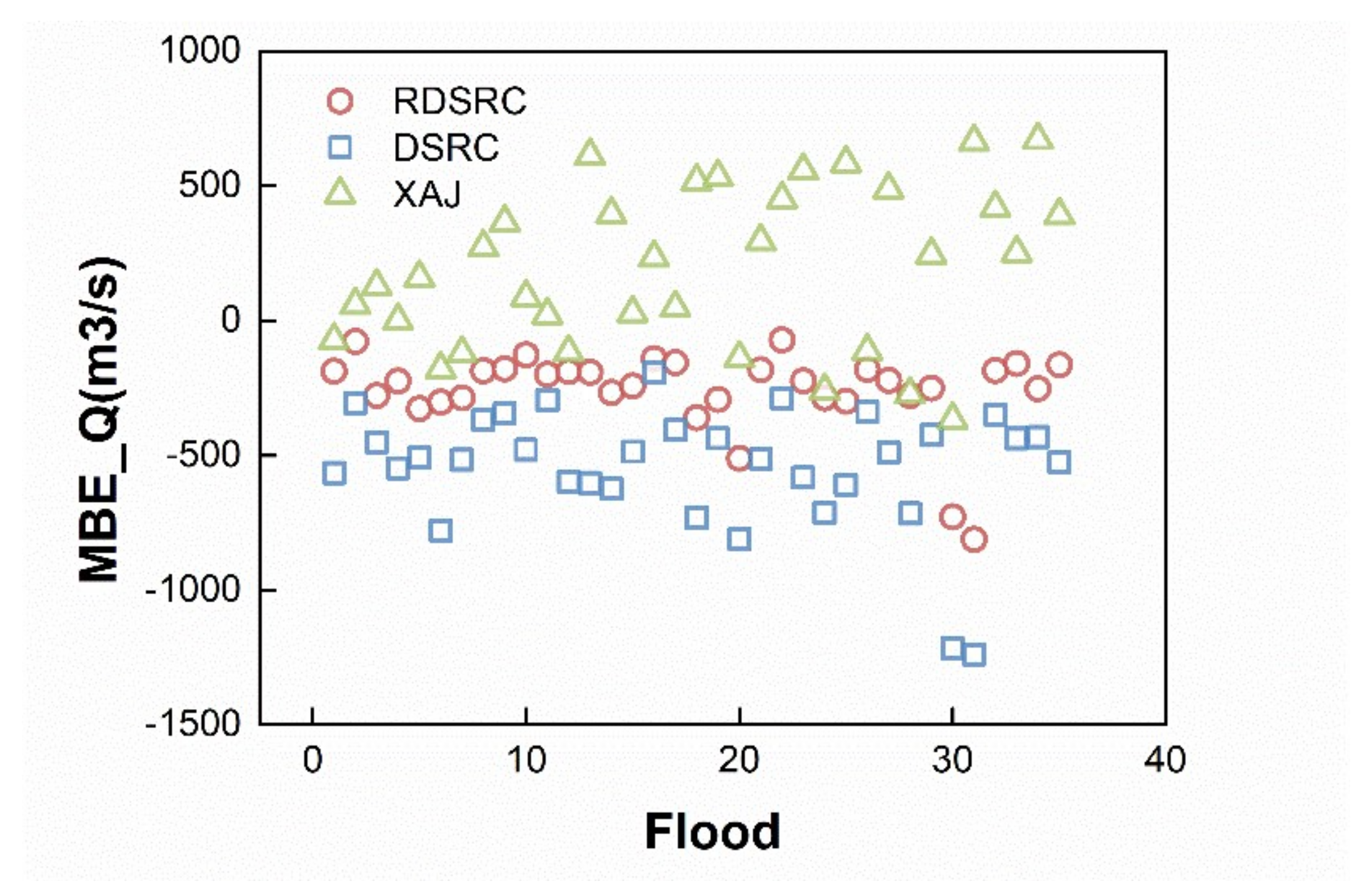
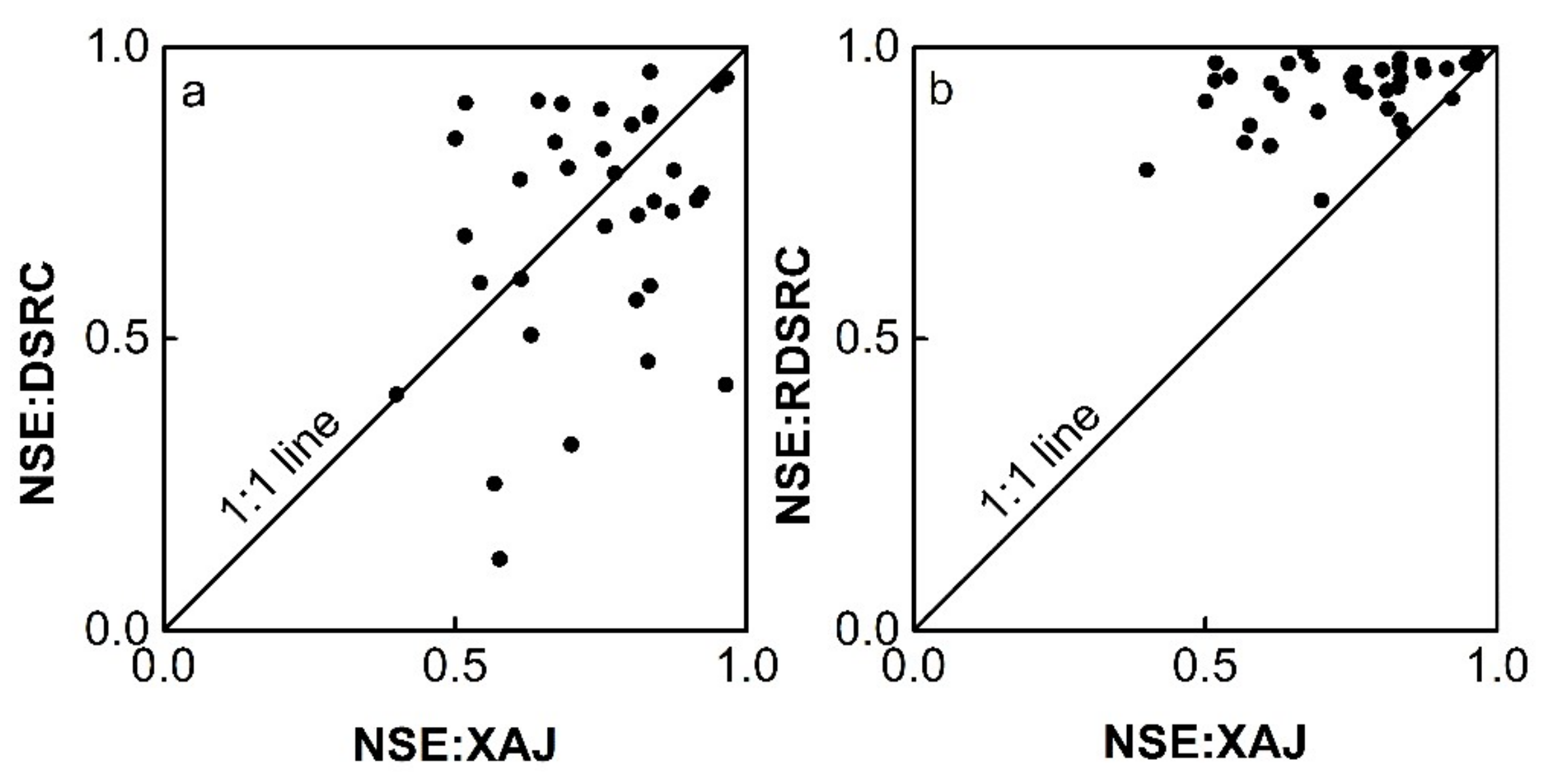
3.2. Real Case
4. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wang, Y.; Liu, R.; Guo, L.; Tian, J.; Zhang, X.; Ding, L.; Wang, C.; Shang, Y. Forecasting and providing warnings of flash floods for ungauged mountainous areas based on a distributed hydrological model. Water 2017, 9, 776. [Google Scholar] [CrossRef]
- Cheng, W.-M.; Huang, C.-L.; Hsu, N.-S.; Wei, C.-C. Risk analysis of reservoir operations considering short-term flood control and long-term water supply: A case study for the da-han creek basin in Taiwan. Water 2017, 9, 424. [Google Scholar] [CrossRef]
- Chen, J.; Zhong, P.-A.; Wang, M.-L.; Zhu, F.-L.; Wan, X.-Y.; Zhang, Y. A risk-based model for real-time flood control operation of a cascade reservoir system under emergency conditions. Water 2018, 10, 167. [Google Scholar] [CrossRef]
- Kan, G.; Tang, G.; Yang, Y.; Hong, Y.; Li, J.; Ding, L.; He, X.; Liang, K.; He, L.; Li, Z. An improved coupled routing and excess storage (crest) distributed hydrological model and its verification in Ganjiang River Basin, China. Water 2017, 9, 904. [Google Scholar] [CrossRef]
- Mai, D.T.; De Smedt, F. A combined hydrological and hydraulic model for flood prediction in Vietnam applied to the huong river basin as a test case study. Water 2017, 9, 879. [Google Scholar] [CrossRef]
- Bárdossy, A.; Das, T. Influence of rainfall observation network on model calibration and application. Hydrol. Earth Syst. Sci. Discuss. 2006, 3, 3691–3726. [Google Scholar] [CrossRef]
- Kavetski, D.; Kuczera, G.; Franks, S.W. Bayesian analysis of input uncertainty in hydrological modeling: 2. Application. Water Resour. Res. 2006, 42. [Google Scholar] [CrossRef]
- Gupta, H.V.; Clark, M.P.; Vrugt, J.A.; Abramowitz, G.; Ye, M. Towards a comprehensive assessment of model structural adequacy. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Gupta, H.V.; Bouten, W.; Sorooshian, S. A shuffled complex evolution metropolis algorithm for optimization and uncertainty assessment of hydrologic model parameters. Water Resour. Res. 2003, 39. [Google Scholar] [CrossRef]
- Li, K.; Kan, G.; Ding, L.; Dong, Q.; Liu, K.; Liang, L. A novel flood forecasting method based on initial state variable correction. Water 2018, 10, 12. [Google Scholar] [CrossRef]
- Sunwoo, W.; Choi, M. Robust initial wetness condition framework of an event-based rainfall–runoff model using remotely sensed soil moisture. Water 2017, 9, 77. [Google Scholar] [CrossRef]
- Wang, J.; Liang, Z.; Jiang, X.; Li, B.; Chen, L. Bayesian theory based self-adapting real-time correction model for flood forecasting. Water 2016, 8, 75. [Google Scholar] [CrossRef]
- Madsen, H.; Skotner, C. Adaptive state updating in real-time river flow forecasting—A combined filtering and error forecasting procedure. J. Hydrol. 2005, 308, 302–312. [Google Scholar] [CrossRef]
- Bao, W.; Zhang, X.; Qu, S. Dynamic correction of roughness in the hydrodynamic model. J. Hydrodyn. Ser. B 2009, 21, 255–263. [Google Scholar] [CrossRef]
- Shamseldin, A.Y.; O’Connor, K.M. A non-linear neural network technique for updating of river flow forecasts. Hydrol. Earth Syst. Sci. 1987, 5, 577–597. [Google Scholar] [CrossRef]
- Valipour, M.; Banihabib, M.E.; Behbahani, S.M.R. Comparison of the arma, arima, and the autoregressive artificial neural network models in forecasting the monthly inflow of dez dam reservoir. J. Hydrol. 2013, 476, 433–441. [Google Scholar] [CrossRef]
- Abrahart, R.J.; See, L. Comparing neural network and autoregressive moving average techniques for the provision of continuous river flow forecasts in two contrasting catchments. Hydrol. Process. 2000, 14, 2157–2172. [Google Scholar] [CrossRef]
- Broersen, P.M.T.; Weerts, A.H. Automatic error correction of rainfall-runoff models in flood forecasting systems. In Proceedings of the 2005 IEEE Instrumentationand Measurement Technology Conference, Ottawa, ON, Canada, 16–19 May 2005; pp. 963–968. [Google Scholar]
- Kuczera, G.; Kavetski, D.; Franks, S.; Thyer, M. Towards a bayesian total error analysis of conceptual rainfall-runoff models: Characterising model error using storm-dependent parameters. J. Hydrol. 2006, 331, 161–177. [Google Scholar] [CrossRef]
- Liu, Y.; Gupta, H.V. Uncertainty in hydrologic modeling: Toward an integrated data assimilation framework. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef]
- McLaughlin, D. An integrated approach to hydrologic data assimilation: Interpolation, smoothing, and filtering. Adv. Water Resour. 2002, 25, 1275–1286. [Google Scholar] [CrossRef]
- Wagener, T.; McIntyre, N.; Lees, M.J.; Wheater, H.S.; Gupta, H.V. Towards reduced uncertainty in conceptual rainfall-runoff modelling: Dynamic identifiability analysis. Hydrol. Process. 2003, 17, 455–476. [Google Scholar] [CrossRef]
- Vrugt, J.A.; Bouten, W.; Gupta, H.V.; Sorooshian, S. Toward improved identifiability of hydrologic model parameters: The information content of experimental data. Water Resour. Res. 2002, 38, 48-1–48-13. [Google Scholar] [CrossRef]
- Misirli, F.; Gupta, H.V.; Sorooshian, S.; Thiemann, M. Bayesian recursive estimation of parameter and output uncertainty for watershed models. In Calibration of Watershed Models; American Geophysical Union: Washington, DC, USA, 2013; pp. 113–124. [Google Scholar]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. Trans. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Jazwinski, A.H. Stochastic Processes and Filtering Theory; Elsevier: New York, NY, USA, 1970. [Google Scholar]
- Holtschlag, D.J.; Grewal, M.S. Estimating ice-affected streamflow by extended kalman filtering. J. Hydrol. Eng. 1998, 3, 174–181. [Google Scholar] [CrossRef]
- Evensen, G. Sequential data assimilation with a nonlinear quasi-geostrophic model using monte carlo methods to forecast error statistics. J. Geophys. Res. Oceans 1994, 99, 10143–10162. [Google Scholar] [CrossRef]
- Yu, Z.; Fu, X.; Lü, H.; Luo, L.; Liu, D.; Ju, Q.; Xiang, L.; Wang, Z. Evaluating ensemble kalman, particle, and ensemble particle filters through soil temperature prediction. J. Hydrol. Eng. 2014, 19. [Google Scholar] [CrossRef]
- Xue, L. Application of the multimodel ensemble kalman filter method in groundwater system. Water 2015, 7, 528–545. [Google Scholar] [CrossRef]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-gaussian bayesian tracking. IEEE Trans. Signal. Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Bao, W.; Si, W.; Qu, S. Flow updating in real-time flood forecasting based on runoff correction by a dynamic system response curve. J. Hydrol. Eng. 2014, 19, 747–756. [Google Scholar]
- Si, W.; Bao, W.; Gupta, H.V. Updating real-time flood forecasts via the dynamic system response curve method. Water Resour. Res. 2015, 51, 5128–5144. [Google Scholar] [CrossRef]
- Bao, W.; Sun, Y.; Zhou, J.; Si, W.; Zhang, Q.; Cheng, X. A new version of system response method for error correction based on total least squares. J. Hydraul. Eng. 2017, 48, 560–567. (In Chinese) [Google Scholar]
- Neumaier, A. Solving ill-conditioned and singular linear systems: A tutorial on regularization. SIAM Rev. 1998, 40, 636–666. [Google Scholar] [CrossRef]
- Yeh, W.W.G. Review of parameter identification procedures in groundwater hydrology: The inverse problem. Water Resour. Res. 1986, 22, 95–108. [Google Scholar] [CrossRef]
- Becker, L.; Yeh, W.W.G. Identification of parameters in unsteady open channel flows. Water Resour. Res. 1972, 8, 956–965. [Google Scholar] [CrossRef]
- Yetkin, M.; Berber, M. Application of the sign-constrained robust least-squares method to surveying networks. J. Surv. Eng. 2013, 139, 59–65. [Google Scholar] [CrossRef]
- Zhao, B.; Tung, Y.-K.; Yang, J.-C. Estimation of unit hydrograph by ridge least-squares method. J. Irrig. Drain. Eng. 1995, 121, 253–259. [Google Scholar] [CrossRef]
- Phillips, D.L. A technique for the numerical solution of certain integral equations of the first kind. J. ACM 1962, 9, 84–97. [Google Scholar] [CrossRef]
- Twomey, S. On the numerical solution of fredholm integral equations of the first kind by the inversion of the linear system produced by quadrature. J. ACM 1963, 10, 97–101. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.Y. Solutions of Ill-Posed Problems; V.H. Winston & Sons: Washington, DC, USA, 1977. [Google Scholar]
- Tikhonov, A.N.; Goncharsky, A.; Stepanov, V.; Yagola, A.G. Numerical Methods for the Solution of Ill-Posed Problems; Volume 328, Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Delves, L.M.; Mohamed, J.L. Computational Methods for Integral Equations; Cambridge University Press: Cambridge, UK, 1988. [Google Scholar]
- Hansen, P.C. Rank-Deficient and Discrete Ill-Posed Problems: Numerical Aspects of Linear Inversion; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1998. [Google Scholar]
- Engl, H.W.; Hanke, M.; Neubauer, A. Regularization of Inverse Problems; Volume 375, Springer Science & Business Media: Berlin, Germany, 1996. [Google Scholar]
- Varah, J. A practical examination of some numerical methods for linear discrete ill-posed problems. SIAM Rev. 1979, 21, 100–111. [Google Scholar] [CrossRef]
- Hansen, P.C. The truncatedSVD as a method for regularization. BIT Numer. Math. 1987, 27, 534–553. [Google Scholar] [CrossRef]
- Golub, G.H.; Heath, M.; Wahba, G. Generalized cross-validation as a method for choosing a good ridge parameter. Technometrics 1979, 21, 215–223. [Google Scholar] [CrossRef]
- Morozov, V.A. On the solution of functional equations by the method of regularization. Dokl. Math. 1966, 7, 414–417. [Google Scholar]
- Hansen, P.C.; O’Leary, D.P. The use of the L-curve in the regularization of discrete ill-posed problems. SIAM J. Sci. Comput. 1993, 14, 1487–1503. [Google Scholar] [CrossRef]
- Hansen, P.C. Analysis of discrete ill-posed problems by means of the L-curve. SIAM Rev. 1992, 34, 561–580. [Google Scholar] [CrossRef]
- Hansen, P.C. The discrete picard condition for discrete ill-posed problems. BIT Numer. Math. 1990, 30, 658–672. [Google Scholar] [CrossRef]
- Zhao, R.J. The Xinanjiang model applied in china. J. Hydrol. 1992, 135, 371–381. [Google Scholar]
- Shi, P.; Zhou, M.; Qu, S.; Chen, X.; Qiao, X.; Zhang, Z.; Ma, X. Testing a conceptual lumped model in karst area, Southwest China. J. Appl. Math. 2013, 2013, 10. [Google Scholar] [CrossRef]
- Bao, W.; Li, Q. Estimating selected parameters for the XAJ model under multicollinearity among watershed characteristics. J. Hydrol. Eng. 2012, 10, 118–128. [Google Scholar]
- Bao, W.; Li, Q.; Qu, S. Efficient calibration technique under irregular response surface. J. Hydrol. Eng. 2013, 18, 1140–1147. [Google Scholar] [CrossRef]
- Lü, H.; Hou, T.; Horton, R.; Zhu, Y.; Chen, X.; Jia, Y.; Wang, W.; Fu, X. The streamflow estimation using the Xinanjiang rainfall runoff model and dual state-parameter estimation method. J. Hydrol. 2013, 480, 102–114. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models part I—A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Schaefli, B.; Gupta, H.V. Do nash values have value? Hydrol. Process. 2007, 21, 2075–2080. [Google Scholar] [CrossRef]
- Golub, G.H.; Hansen, P.C.; O’Leary, D.P. Tikhonov regularization and total least squares. SIAM J. Matrix Anal. Appl. 2010, 21, 185–194. [Google Scholar] [CrossRef]
- Liu, Y.; Weerts, A.; Clark, M.; Hendricks Franssen, H.-J.; Kumar, S.; Moradkhani, H.; Seo, D.-J.; Schwanenberg, D.; Smith, P.; Van Dijk, A. Advancing data assimilation in operational hydrologic forecasting: Progresses, challenges, and emerging opportunities. Hydrol. Earth Syst. Sci. 2012, 16, 3863–3887. [Google Scholar] [CrossRef] [Green Version]
- Rao, C.V.; Rawlings, J.B.; Mayne, D.Q. Constrained state estimation for nonlinear discrete-time systems: Stability and moving horizon approximations. IEEE Trans. Autom. Control 2003, 48, 246–258. [Google Scholar] [CrossRef]
- Simon, D.; Chia, T.L. Kalman filtering with state equality constraints. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 128–136. [Google Scholar] [CrossRef]
- Ungarala, S.; Dolence, E.; Li, K. Constrained extended kalman filter for nonlinear state estimation. IFAC Proc. Vol. 2007, 40, 63–68. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Function | Methods | Parameter | Meaning | Unit |
|---|---|---|---|---|---|
| TLE | Evapotranspiration | Three-layer soil moisture model | K | Ratio of potential evapotranspiration to pan evaporation | - |
| WUM | Areal mean tension water capacity of the upper layer | mm | |||
| WLM | Areal mean tension water capacity of the lower layer | mm | |||
| WDM | Areal mean tension water capacity of the deeper layer | mm | |||
| C | Coefficient of deep evapotranspiration | - | |||
| IM | Ratio of impervious area | - | |||
| SRP | Runoff production | Runoff formation on storage repletion | WM | Areal mean tension water capacity | mm |
| B | Exponent of the tension water capacity distribution curve | - | |||
| SOR | Runoff separation | Free water storage model | SM | Areal mean free water capacity of the surface soil layer | mm |
| EX | Exponent of the free water capacity curve | - | |||
| KI | Outflow coefficients of the free water storage to interflow | - | |||
| KG | Outflow coefficients of the free water storage to groundwater | - | |||
| FC | Runoff concentration | Linear reservoir | CS | Recession constant of the surface water storage | - |
| CI | Recession constant of the interflow storage | - | |||
| CG | Recession constant of the groundwater storage | - | |||
| MSSR | Flood routing | Muskingum method | KE | Storage-time constant | - |
| XE | Weight factor | - |
| Variable | Units | Description |
|---|---|---|
| RS | mm | Surface runoff |
| RI | mm | Interflow runoff |
| RG | mm | Groundwater runoff |
| S | mm | Free water storage |
| Module | |||||||
|---|---|---|---|---|---|---|---|
| TLE and SRP | SOR | FC | MSSR | ||||
| Parameter | Value | Parameter | Value | Parameter | Value | Parameter | Value |
| K | 0.8 | SM | 30 | CS | 0.875 | KE | 1 |
| WUM | 20 | EX | 1.5 | CI | 0.925 | XE | 0.49 |
| WLM | 80 | KI | 0.35 | CG | 0.995 | ||
| WDM | 30 | KG | 0.35 | ||||
| C | 0.16 | ||||||
| IM | 0.01 | ||||||
| WM | 130 | ||||||
| B | 0.4 | ||||||
| Module | |||||||
|---|---|---|---|---|---|---|---|
| TLE and SRP | SOR | FC | MSSR | ||||
| Parameter | Value | Parameter | Value | Parameter | Value | Parameter | Value |
| K | 1.18 | SM | 34 | CS | 0.798 | KE | 1 |
| WUM | 20 | EX | 1.5 | CI | 0.9 | XE | 0.38 |
| WLM | 80 | KI | 0.379 | CG | 0.995 | ||
| WDM | 50 | KG | 0.321 | ||||
| C | 0.16 | ||||||
| IM | 0.001 | ||||||
| WM | 150 | ||||||
| B | 0.4 | ||||||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Bao, W.; Jiang, P.; Si, W.; Zhou, J.; Zhang, Q. Development of a Regularized Dynamic System Response Curve for Real-Time Flood Forecasting Correction. Water 2018, 10, 450. https://doi.org/10.3390/w10040450
Sun Y, Bao W, Jiang P, Si W, Zhou J, Zhang Q. Development of a Regularized Dynamic System Response Curve for Real-Time Flood Forecasting Correction. Water. 2018; 10(4):450. https://doi.org/10.3390/w10040450
Chicago/Turabian StyleSun, Yiqun, Weimin Bao, Peng Jiang, Wei Si, Junwei Zhou, and Qian Zhang. 2018. "Development of a Regularized Dynamic System Response Curve for Real-Time Flood Forecasting Correction" Water 10, no. 4: 450. https://doi.org/10.3390/w10040450
APA StyleSun, Y., Bao, W., Jiang, P., Si, W., Zhou, J., & Zhang, Q. (2018). Development of a Regularized Dynamic System Response Curve for Real-Time Flood Forecasting Correction. Water, 10(4), 450. https://doi.org/10.3390/w10040450