Sensitivity of Soil Moisture Analyses to Contrasting Background and Observation Error Scenarios




Abstract
:1. Introduction
2. Methodology
2.1. The ECMWF Soil Moisture Analysis
2.2. Errors Specification
2.3. Experiment Types
- (i)
- OL: Open-loop configuration where the soil moisture state evolves freely in the 12 h land assimilation window without any additional observational constraint, i.e., no soil moisture analysis is performed.
- (ii)
- SLV: Screen-level variables assimilation only, which updates the soil moisture state based on indirect information provided by in situ observations of 2 m temperature and 2 m relative humidity.
- (iii)
- SMOS: SMOS assimilation only, with the model background error static during the whole assimilation cycle.
- (iv)
- SLV+SMOS: Combined assimilation of screen-level variables and SMOS with observation errors and background errors as defined in Section 2.2.
- (v)
- SMOS+Bprop: SMOS assimilation only, but enabling the propagation of the background error according to the SEKF equations. In this experiment, the model error was set to 0.01 mm at the start of the assimilation window for each model layer.
- (vi)
- SMOS+PI: In this case, the soil moisture analyses were substituted by the observed SMOS projected into control space. Thus, the soil moisture analysis is obtained by inverting the observation operator applied to the observed . This approach gives maximum weight to the observations. The term PI (pseudo-insertion) refers to the fact that SMOS observations are still subjected to the different quality controls applied in the ECMWF SEKF, so at each time the observation was rejected the analysed soil moisture value is equal to its background value.
- (vii)
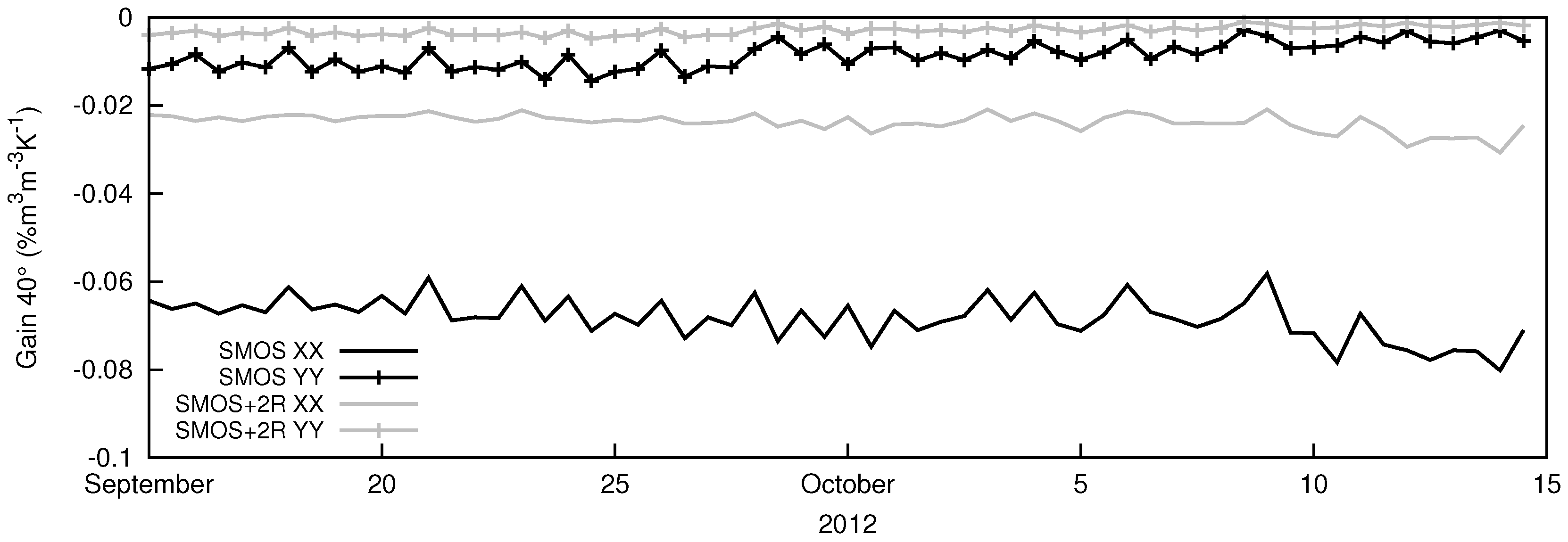
- SMOS+2R: SMOS assimilation only, but the default error assigned to each observation was doubled, and therefore decreasing the influence of the observations.
- (viii)
- SMOS+Btext: SMOS assimilation only, but the background error was a function of the water holding capacity (WHC), defined as the difference between the soil capacity and the wilting point. Given that the land model used in this study used a global map of soil texture types, each of them with its own saturation and wilting point, the error in this experiment is a function of the soil texture type, and it will be larger for those soils with larger holding capacity, as organic type. An error of 10% of the WHC was assumed which for a medium soil texture type is equivalent to 20 mm of error integrated over the first metre of soil.
- (ix)
- SMOS+3DB: SMOS assimilation only, but assuming a background model error that depends on both the horizontal and the vertical dimension (3DB). In this case, it is assumed that the short term variability and precipitation errors affect mainly the top layer, whereas the root-zone is less affected. An error of 20% of the WHC was set for the top layer, whereas this error was halved for the second soil layer (7–28 cm), and it was assumed to be only 5% of the WHC for the third layer (28–100 cm).
- Group I (OL, SLV, SMOS and SLV+SMOS): This first group of experiments was created to study the impact of the different type of observation assimilated in the SEKF. In this group, the OL experiment was used as the control experiment.
- Group II (SMOS+PI, SMOS, and SMOS+2R): This second group of experiments was intended to investigate the effect of giving different weights to SMOS when only this type of observation was assimilated. The SMOS experiment was used as control in this group.
- Group III (SMOS, SMOS+Bprop, SMOS+Btext, and SMOS+3DB): In this group, the influence of different definitions of the background error covariance matrix in the analyses of soil moisture was investigated. Experiment SMOS was used as control as well.
2.4. Evaluation and Verification Strategy
3. Results
3.1. Soil Moisture Evaluation
3.1.1. Group I
3.1.2. Group II
3.1.3. Group III
3.1.4. Intercomparison of All Experiments
3.2. Near-Surface Atmospheric Impact
3.2.1. Two-Metre Temperature and Dew Point Temperature Validation
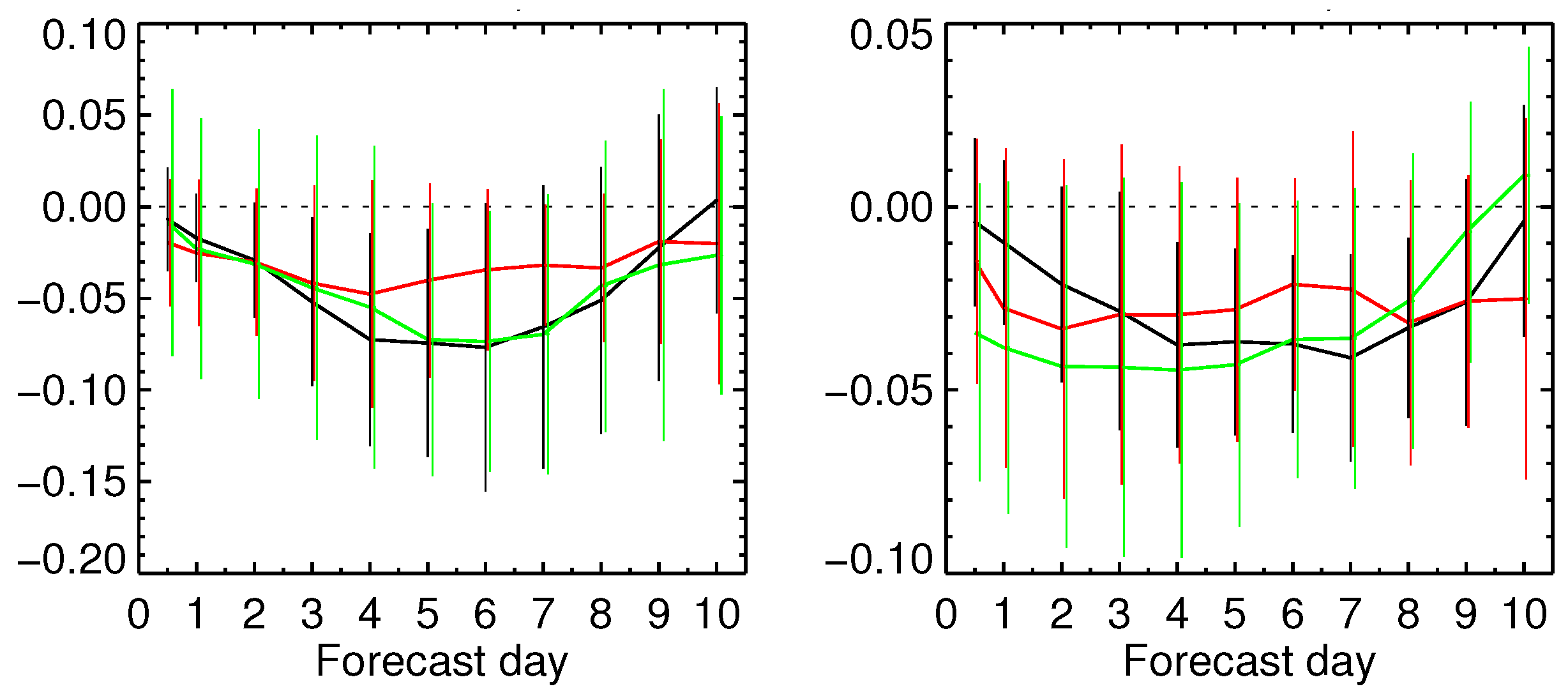
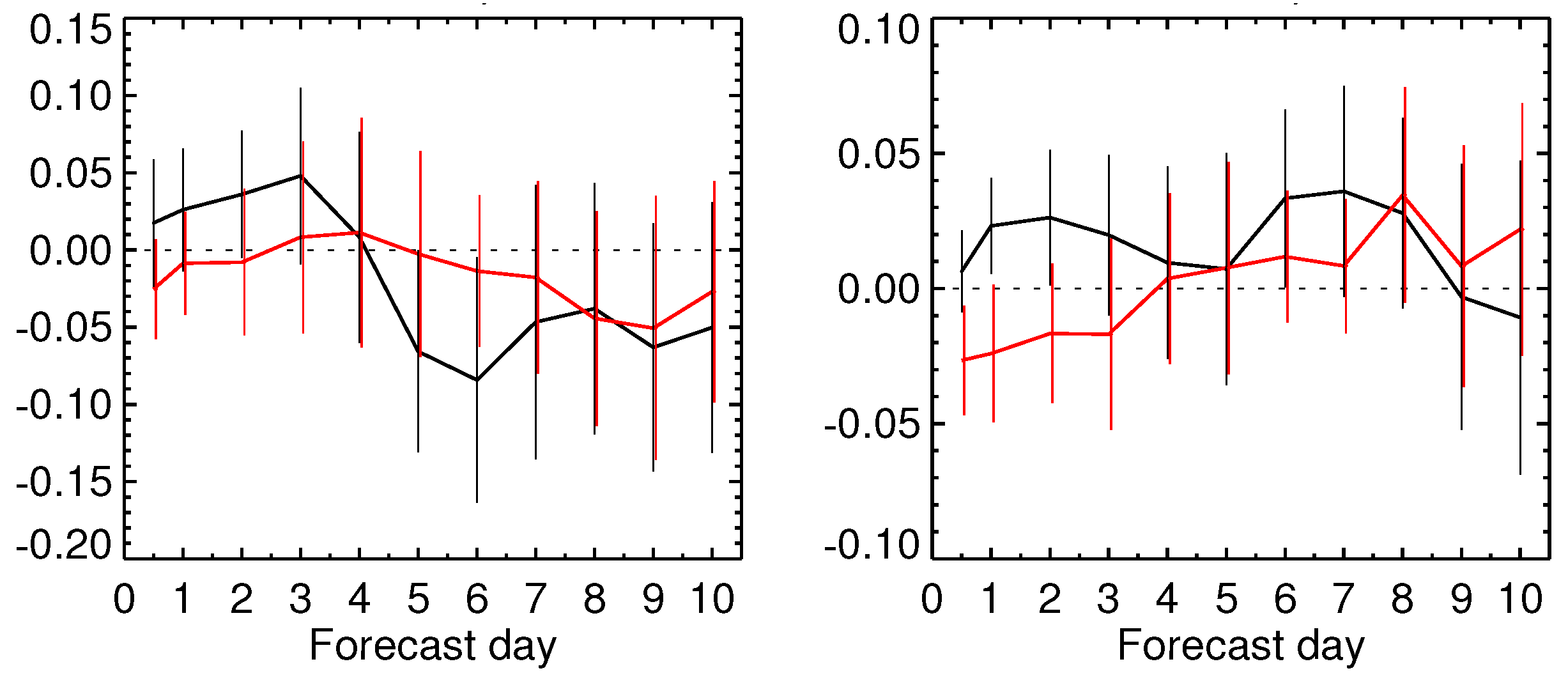
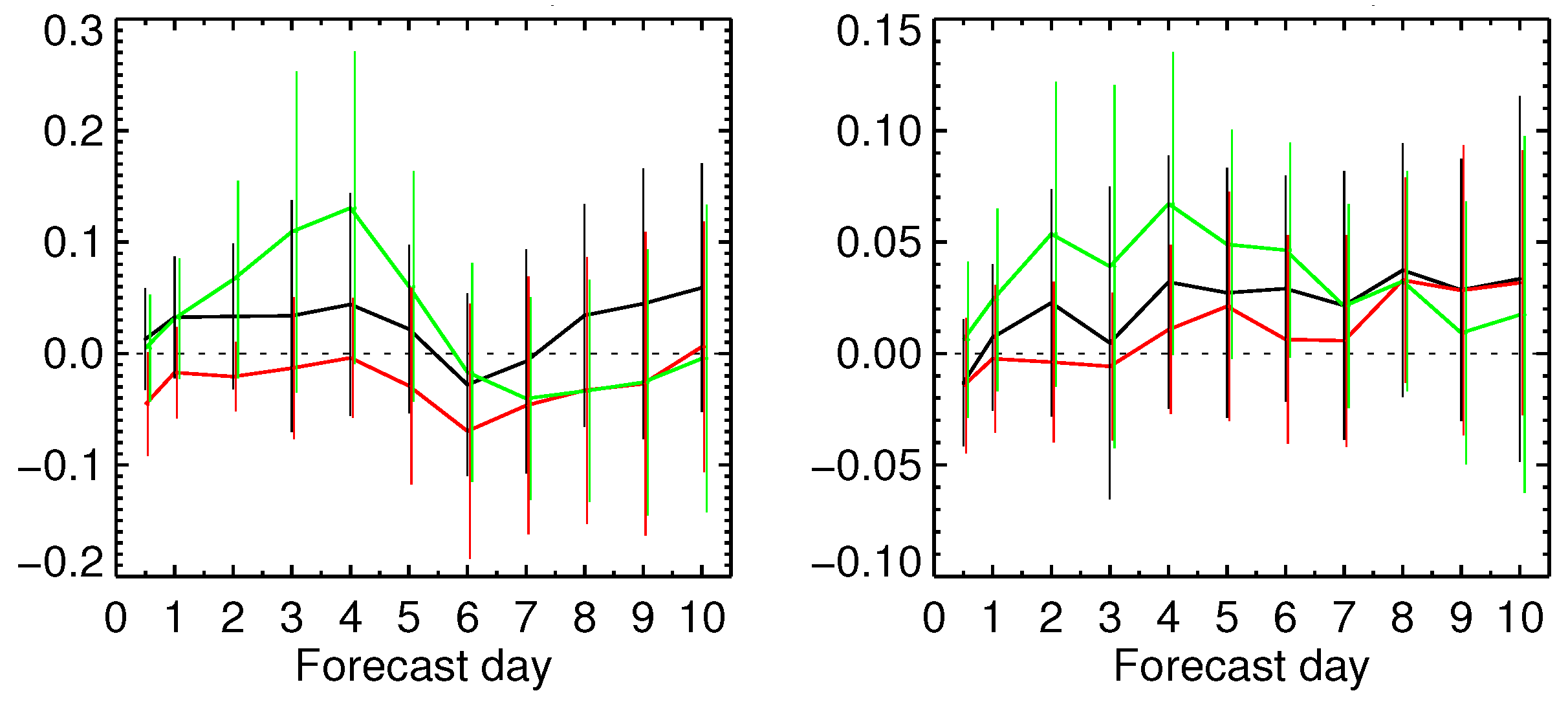
3.2.2. Near-Surface Atmospheric Scores
4. Summary and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ESA | European Space Agency |
| ECMWF | European Centre for Medium Range Weather Forecasts |
| IFS | Integrated Forecasting System |
| SMOS | Soil Moisture and Ocean Salinity |
| NWP | Numerical Weather Prediction |
| SEKF | Simplified Extended Kalman Filter |
| RMSD | Root Mean Squared Difference |
| ubRMSD | unbiased RMSD |
| Brightness Temperatures | |
| FAO | Food and Agriculture Organization |
| NRT | Near Real Time |
| RFI | Radio Frequency Interference |
| WHC | Water Holding Capacity |
References
- Shukla, J.; Mintz, Y. Influence of land-surface evapotranspiration on the Earth’s climate. Science 1982, 215, 1498–1501. [Google Scholar] [CrossRef] [PubMed]
- Koster, R.; Suarez, M.J. Relative contributions of land and ocean processes to precipitation variability. J. Geophys. Res. 1992, 100, 13775–13790. [Google Scholar] [CrossRef]
- Beljaars, A.C.M.; Viterbo, P.; Miller, M. The Anomalous Rainfall over the United States during July 1993: Sensitivity to Land Surface Parameterization and Soil Moisture Anomalies. J. Hydrometeorol. 1996, 124, 362–383. [Google Scholar] [CrossRef] [Green Version]
- Douville, H.; Viterbo, P.; Mahfouf, J.; Beljaars, A. Evaluation of optimal interpolation and nudging techniques for soil moisture analysis using FIFE data. Mon. Weather Rev. 2000, 128, 1733–1756. [Google Scholar] [CrossRef]
- Drusch, M.; Viterbo, P. Assimilation of screen-level variables in ECMWF’s Integrated Forecast System: A study on the impact of the forecast quality and analyzed soil moisture. Mon. Weather Rev. 2007, 135, 300–314. [Google Scholar] [CrossRef]
- Koster, R.D.; Mahanama, S.P.P.; Yamada, T.J.; Balsamo, G.; Berg, A.A.; Boisserie, M.; Dirmeyer, P.A.; Doblas-Reyes, F.J.; Drewitt, G.; Gordon, C.T.; et al. The second phase of the global land-atmosphere coupling experiment: Soil moisture contribution to subseasonal forecast skill. J. Hydrometeorol. 2011, 12, 805–822. [Google Scholar] [CrossRef]
- Reichle, R.; Koster, R.D.; Liu, P.; Mahanama, S.P.P.; Njoku, E.G.; Owe, M. Comparison and assimilation of global soil moisture retrievals from the Advanced Microwave Scanning Radiometer for the Earth Observing System (AMSR-E) and the Scanning Multichannel Microwave Radiometer (SMMR). J. Geophys. Res. 2007, 112, D09108. [Google Scholar] [CrossRef]
- Draper, C.S.; Mahfouf, J.F.; Walker, J.P. Root zone soil moisture from the assimilation of screen-level variables and remotely sensed soil moisture. J. Geophys. Res. 2011, 116, D02127. [Google Scholar] [CrossRef]
- Ridler, M.; Madsen, M.; Stisen, S.; Bircher, S.; Fensholt, R. Assimilation of SMOS-derived soil moisture in a fully integrated hydrological and soil-vegetation-atmosphere transfer model in Western Denmark. Water Resour. Res. 2014, 50, 8962–8981. [Google Scholar] [CrossRef] [Green Version]
- Muñoz-Sabater, J. Incorporation of passive microwave brightness temperatures in the ECMWF soil moisture analysis. Remote Sens. 2015, 7, 5758–5784. [Google Scholar] [CrossRef]
- Muñoz-Sabater, J.; Jarlan, L.; Calvet, J.; Bouyssel, F.; de Rosnay, P. From near surface to root-zone soil moisture using different assimilation techniques. J. Hydrometeorol. 2007, 8, 194–206. [Google Scholar] [CrossRef]
- Sabater, J.M.; Rüdiger, C.; Calvet, J.C.; Fritz, N.; Jarlan, L.; Kerr, Y. Joint assimilation of surface soil moisture and LAI observations into a land surface model. Agric. For. Meteorol. 2008, 148, 1362–1373. [Google Scholar] [CrossRef] [Green Version]
- Mahfouf, J.F.; Bergaoui, K.; Draper, C.; Bouyssel, F.; Taillefer, F.; Taseva, L. A comparison of two off-line soil analysis schemes for assimilation of screen level observations. J. Geophys. Res. 2009, 114, D08105. [Google Scholar] [CrossRef]
- Zwieback, S.; Scipal, K.; Dorigo, W.; Wagner, W. Structural and statistical properties of the collocation technique for error characterization. Nonlinear Process. Geophys. 2012, 19, 69–80. [Google Scholar] [CrossRef] [Green Version]
- Pierdicca, N.; Fascetti, F.; Pulvirenti, L.; Crapolicchio, R.; Muñoz-Sabater, J. Analysis of ASCAT, SMOS, in-situ and land model soil moisture as a regionalized variable over Europe and North Africa. Remote Sens. Environ. 2015, 170, 280–289. [Google Scholar] [CrossRef]
- Drusch, M.; de Rosnay, P.; Balsamo, G.; Andersson, E.; Bougeault, P.; Viterbo, P. Towards a Kalman filter based soil moisture analysis system for the operational ECMWF Integrated Forecast System. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef]
- De Rosnay, P.; Drusch, M.; Vasiljevic, D.; Balsamo, G.; Albergel, C.; Isaksen, L. A Simplified Extended Kalman Filter for the global operational soil moisture analysis at ECMWF. Q. J. R. Meteorol. Soc. 2012, 139, 1199–1213. [Google Scholar] [CrossRef]
- Balsamo, G.; Viterbo, P.; Beljaars, A.; van den Hurk, B.; Hirschi, M.; Betts, A.; Scipal, K. A revised hydrology for the ECMWF model: Verification from field site to terrestrial water storage and impact in the Integrated Forecast System. J. Hydrometeorol. 2009, 10, 623–643. [Google Scholar] [CrossRef]
- Muñoz-Sabater, J.; Fouilloux, A.; de Rosnay, P. Technical implementation of SMOS data in the ECMWF Integrated Forecasting System. Geosci. Remote Sens. Lett. 2012, 9, 252–256. [Google Scholar] [CrossRef]
- Daley, R. Atmospheric Data Analysis; Number 2; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Salgado, R. Global Soil Maps of Sand and Clay Fractions and of the Soil Depth for MESONH Simulation Based on FAO/UNESCO Soil Maps; Technical Report 59; CNRM: Météo, France, 1999. [Google Scholar]
- Lannoy, G.D.; Reichle, R. Global Assimilation of Multiangle and Multipolarization SMOS Brightness Temperature Observations into the GEOS-5 Catchment Land Surface Model for Soil Moisture Estimation. JHs 2016, 17, 669–691. [Google Scholar] [CrossRef]
- Lievens, H.; Tomer, S.; Bitar, A.A.; Lannoy, G.D.; Drusch, M.; Dumedah, G.; Franssen, H.; Kerr, Y.; Martens, B.; Pan, M.; et al. SMOS soil moisture assimilation for improved hydrologic simulation in the Murray Darling Basin, Australia. RSEs 2015, 168, 146–162. [Google Scholar] [CrossRef] [Green Version]
- Muñoz-Sabater, J.; de Rosnay, P.; Jiménez, C.; Isaksen, L. SMOS brightness temperatures angular noise: Characterization, filtering and validation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5827–5839. [Google Scholar] [CrossRef]
- Kerr, Y.; Waldteufel, P.; Wigneron, J.P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS mission: New tool for monitoring key elements of the Global Water Cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef] [Green Version]
- Draper, C.; Reichle, R.; de Lannoy, G.; Liu, Q. Assimilation of passive and active microwave soil moisture retrievals. Geophys. Res. Lett. 2012, 39, L04401. [Google Scholar] [CrossRef]
- De Rosnay, P.; Muñoz-Sabater, J.; Albergel, C.; Isaksen, L. Comparing ERA-Interim based L-band brightness temperatures with SMOS observations: Configuration of the Community Microwave emission Modelling Platform, bias correction and SMOS long term monitoring results. 2018; unpublished. [Google Scholar]
- Albergel, C.; Dorigo, W.; Balsamo, G.; Muñoz-Sabater, J.; de Rosnay, P.; Isaksen, L.; Brocca, L.; de Jeu, R.; Wagner, W. Monitoring Multidecadal satellite Earth observation of soil moisture products through land surface reanalysis. Remote Sens. Environ. 2013, 138, 77–89. [Google Scholar] [CrossRef]
- Entekhabi, D.; Reichle, R.H.; Koster, R.D.; Crow, W.T. Performance Metrics for Soil Moisture Retrievals and Application Requirements. J. Hydrometeorol. 2010, 11, 832–840. [Google Scholar] [CrossRef]
- Albergel, C.; Calvet, J.; de Rosnay, P.; Balsamo, G.; Wagner, W.; Hasenauer, S.; Naeimi, V.; Martin, E.; Bazile, E.; Bouyssel, F.; et al. Cross-evaluation of modelled and remotely sensed surface soil moisture with in situ data in southwestern France. Hydrol. Earth Syst. Sci. 2010, 14, 2177–2191. [Google Scholar] [CrossRef] [Green Version]
- Geer, A. Significance of Changes in Medium-Range Forecast Scores; Technical Report 766; European Centre for Medium-Range Weather Forecasts: Reading, UK, 2015. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Analysis | SLV | SMOS | |||
|---|---|---|---|---|---|---|
| OL | no | no | no | - | - | - |
| SLV | yes | yes | no | [1K, 4%] | - | 0.01 |
| SMOS+SLV | yes | yes | yes | [1K, 4%] | RA | 0.01 |
| SMOS | yes | no | yes | - | RA | 0.01 |
| SMOS-Bprop | yes | no | yes | - | RA | 0.01 |
| SMOS+PI | yes | no | yes | - | 0.01 | |
| SMOS+2R | yes | no | yes | - | 2 × RA | 0.01 |
| SMOS-Btext | yes | no | yes | - | RA | |
| SMOS-3DB | yes | no | yes | - | RA |
| USCRN | SCAN | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| expt | Bias | ubRMSD | R | N | Bias | ubRMSD | R | N | |
| 0–7 cm | OL | −0.140 | 0.031 | 0.68 | 38 | −0.063 | 0.032 | 0.63 | 58 |
| SLV | −0.140 | 0.030 | 0.68 | 38 | −0.062 | 0.031 | 0.64 | 58 | |
| SMOS+SLV | −0.120 | 0.037 | 0.70 | 38 | −0.044 | 0.035 | 0.65 | 58 | |
| SMOS | −0.114 | 0.034 | 0.64 | 38 | −0.031 | 0.034 | 0.61 | 58 | |
| 0–100 cm | OL | −0.104 | 0.014 | 0.76 | 38 | −0.041 | 0.016 | 0.67 | 58 |
| SLV | −0.103 | 0.014 | 0.75 | 38 | −0.040 | 0.016 | 0.64 | 58 | |
| SMOS+SLV | −0.101 | 0.014 | 0.61 | 38 | −0.038 | 0.016 | 0.65 | 58 | |
| SMOS | −0.092 | 0.017 | 0.73 | 38 | −0.031 | 0.018 | 0.54 | 58 | |
| USCRN | SCAN | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| expt | Bias | ubRMSD | R | N | Bias | ubRMSD | R | N | |
| 0–7 cm | SMOS+PI | −0.013 | 0.029 | 0.58 | 38 | −0.054 | 0.035 | 0.57 | 49 |
| SMOS | −0.011 | 0.037 | 0.61 | 38 | −0.031 | 0.036 | 0.61 | 49 | |
| SMOS+2R | −0.011 | 0.031 | 0.67 | 38 | −0.044 | 0.032 | 0.65 | 49 | |
| 0–100 cm | SMOS+PI | −0.096 | 0.018 | 0.48 | 38 | −0.043 | 0.019 | 0.53 | 49 |
| SMOS | −0.095 | 0.016 | 0.52 | 38 | −0.037 | 0.017 | 0.53 | 49 | |
| SMOS+2R | −0.095 | 0.016 | 0.58 | 38 | −0.039 | 0.016 | 0.69 | 49 | |
| USCRN | SCAN | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| expt | Bias | ubRMSD | R | N | Bias | ubRMSD | R | N | |
| 0–7 cm | SMOS | −0.097 | 0.036 | 0.62 | 41 | −0.027 | 0.036 | 0.62 | 51 |
| SMOS-Bprop | −0.096 | 0.036 | 0.64 | 41 | −0.029 | 0.036 | 0.63 | 51 | |
| SMOS-Btext | −0.086 | 0.042 | 0.59 | 41 | −0.015 | 0.042 | 0.54 | 51 | |
| SMOS-3DB | −0.085 | 0.044 | 0.58 | 41 | −0.017 | 0.043 | 0.52 | 51 | |
| 0–100 cm | SMOS | −0.080 | 0.015 | 0.57 | 41 | −0.029 | 0.019 | 0.51 | 51 |
| SMOS-Bprop | −0.079 | 0.016 | 0.53 | 41 | −0.028 | 0.019 | 0.58 | 51 | |
| SMOS-Btext | −0.079 | 0.015 | 0.50 | 41 | −0.028 | 0.019 | 0.55 | 51 | |
| SMOS-3DB | −0.078 | 0.016 | 0.49 | 41 | −0.027 | 0.019 | 0.51 | 51 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muñoz-Sabater, J.; De Rosnay, P.; Albergel, C.; Isaksen, L. Sensitivity of Soil Moisture Analyses to Contrasting Background and Observation Error Scenarios. Water 2018, 10, 890. https://doi.org/10.3390/w10070890
Muñoz-Sabater J, De Rosnay P, Albergel C, Isaksen L. Sensitivity of Soil Moisture Analyses to Contrasting Background and Observation Error Scenarios. Water. 2018; 10(7):890. https://doi.org/10.3390/w10070890
Chicago/Turabian StyleMuñoz-Sabater, Joaquín, Patricia De Rosnay, Clément Albergel, and Lars Isaksen. 2018. "Sensitivity of Soil Moisture Analyses to Contrasting Background and Observation Error Scenarios" Water 10, no. 7: 890. https://doi.org/10.3390/w10070890
APA StyleMuñoz-Sabater, J., De Rosnay, P., Albergel, C., & Isaksen, L. (2018). Sensitivity of Soil Moisture Analyses to Contrasting Background and Observation Error Scenarios. Water, 10(7), 890. https://doi.org/10.3390/w10070890