Regional Inundation Forecasting Using Machine Learning Techniques with the Internet of Things


Abstract
:1. Introduction
2. Methodology
3. Study Area and Datasets
4. Model Construction
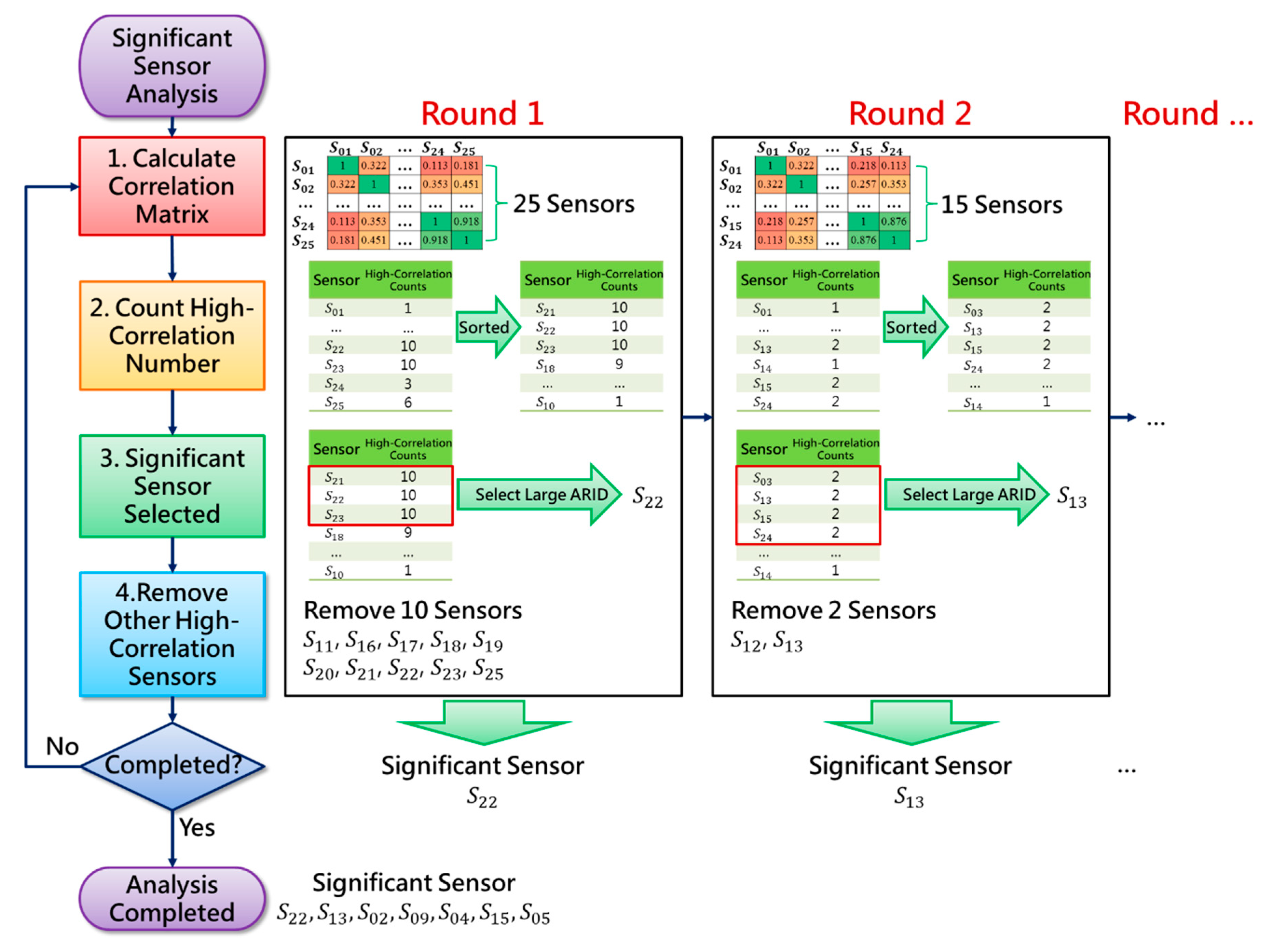
- Calculate the correlation matrix between sensors.
- Count the number of highly correlated (R2 > 0.9) sensors and sorting their number from large to small.
- Select a representative sensor from those sensors that have the highest number of correlated sensors; if the number is the same, compare their ARID and then select the sensor with the largest ARID for priority selection (as the representative sensor).
- Remove those highly correlated sensors with the above representative sensor to avoid repeated selection. For example, in the first round, was selected as the representative sensor (Figure 5). Before moving to the next round of selection, those sensors highly correlated with sensor (i.e., R2 > 0.9) would be removed from the correlation matrix. In this round, 10 sensors (including ) were removed.
- If the selection has not been completed, return to step 1 and recalculate the correlation matrix of the remaining sensors until the selection is completed. That is, all the sensors will either be selected as the representative sensors or be removed during the selection process.
5. Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kalyanapu, A.J.; Shankar, S.; Pardyjak, E.R.; Judi, D.R.; Burian, S.J. Assessment of GPU computational enhancement to a 2D flood model. Environ. Model. Softw. 2011, 26, 1009–1016. [Google Scholar] [CrossRef]
- Nayak, P.C.; Sudheer, K.P.; Rangan, D.M.; Ramasastri, K.S. Short-term flood forecasting with a neurofuzzy model. Water Resour. Res. 2005, 41. [Google Scholar] [CrossRef] [Green Version]
- Mai, D.T.; De Smedt, F. A combined hydrological and hydraulic model for flood prediction in Vietnam applied to the Huong river basin as a test case study. Water 2017, 9, 879. [Google Scholar] [CrossRef] [Green Version]
- Adamowski, J.; Chan, H.F.; Prasher, S.O.; Ozga-Zielinski, B.; Sliusarieva, A. Comparison of multiple linear and nonlinear regression, autoregressive integrated moving average, artificial neural network, and wavelet artificial neural network methods for urban water demand forecasting in Montreal, Canada. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef]
- Rezaeianzadeh, M.; Tabari, H.; Yazdi, A.A.; Isik, S.; Kalin, L. Flood flow forecasting using ANN, ANFIS and regression models. Neural Comput. Appl. 2014, 25, 25–37. [Google Scholar] [CrossRef]
- Zare, M.; Koch, M. An analysis of MLR and NLP for use in river flood routing and comparison with the Muskingum method. In Proceedings of the ICHE 2014—11th International Conference on Hydroscience & Engineering, Hamburg, Germany, 28 September–2 October 2014; pp. 505–514. Available online: https://henry.baw.de/bitstream/handle/20.500.11970/99469/06_16.pdf?sequence=1&isAllowed=y (accessed on 31 May 2020).
- Valipour, M.; Banihabib, M.E.; Behbahani, S.M.R. Comparison of the ARMA, ARIMA, and the autoregressive artificial neural network models in forecasting the monthly inflow of Dez dam reservoir. J. Hydrol. 2013, 476, 433–441. [Google Scholar] [CrossRef]
- Huang, Y.F.; Mirzaei, M.; Yap, W.K. Flood analysis in Langat river basin using stochastic model. Int. J. Geomate. 2016, 11, 2796–2803. [Google Scholar]
- Ab Razak, N.H.; Aris, A.Z.; Ramli, M.F.; Looi, L.J.; Juahir, H. Temporal flood incidence forecasting for Segamat River (Malaysia) using autoregressive integrated moving average modelling. J. Flood Risk Manag. 2018, 11, S794–S804. [Google Scholar] [CrossRef]
- Machekposhti, K.H.; Sedghi, H.; Telvari, A.; Babazadeh, H. Flood Predicting in Karkheh River Basin Using Stochastic ARIMA Model. Int. J. Agric. Biosyst. Eng. 2018, 12, 89–96. [Google Scholar]
- Kan, G.; He, X.; Ding, L.; Li, J.; Liang, K.; Hong, Y. Study on applicability of conceptual hydrological models for flood forecasting in humid, semi-humid semi-arid and arid basins in China. Water 2017, 9, 719. [Google Scholar] [CrossRef] [Green Version]
- Chiang, Y.M.; Chang, L.C.; Tsai, M.J.; Wang, Y.F.; Chang, F.J. Dynamic neural networks for real-time water level predictions of Sewerage systems-covering gauged and unguaged sites. Hydrol. Earth Syst. Sci. 2010, 14, 1309–1319. [Google Scholar] [CrossRef] [Green Version]
- Chang, F.J.; Chen, P.A.; Liu, C.W.; Liao, V.H.C.; Liao, C.M. Regional estimation of groundwater arsenic concentrations through systematical dynamic-neural modeling. J. Hydrol. 2013, 499, 265–274. [Google Scholar] [CrossRef]
- Ruslan, F.A.; Samad, A.M.; Zain, Z.M.; Adnan, R. Flood water level modeling and prediction using NARX neural network: Case study at Kelang river. In Proceedings of the 2014 IEEE 10th International Colloquium on Signal Processing and its Applications IEEE, Kuala Lumpur, Malaysia, 7–9 March 2014; pp. 204–207. [Google Scholar] [CrossRef]
- Mosavi, A.; Ozturk, P.; Chau, K.W. Flood prediction using machine learning models: Literature review. Water 2018, 10, 1536. [Google Scholar] [CrossRef] [Green Version]
- Noymanee, J.; Nikitin, N.O.; Kalyuzhnaya, A.V. Urban pluvial flood forecasting using open data with machine learning techniques in pattani basin. Procedia Comput. Sci. 2017, 119, 288–297. [Google Scholar] [CrossRef]
- Puttinaovarat, S.; Horkaew, P. Flood Forecasting System Based on Integrated Big and Crowdsource Data by Using Machine Learning Techniques. IEEE Access 2020, 8, 5885–5905. [Google Scholar] [CrossRef]
- PB, L.P.; Bhakthavathsalam, R.; Vishruth, K. Urban Flood Forecast using Machine Learning on Real Time Sensor Data. Trans. Mach. Learn. Artif. Intell. 2017, 5, 69. Available online: https://journals.scholarpublishing.org/index.php/TMLAI/article/view/3552/2104 (accessed on 31 May 2020). [CrossRef]
- Tayfur, G.; Singh, V.P.; Moramarco, T.; Barbetta, S. Flood hydrograph prediction using machine learning methods. Water 2018, 10, 968. [Google Scholar] [CrossRef] [Green Version]
- Leontaritis, I.J.; Billings, S.A. Input-output parametric models for non-linear systems Part I: Deterministic non-linear systems, Part II: Stochastic non-linear systems. Int. J. Control 1985, 41, 303–344. [Google Scholar] [CrossRef]
- Tian, C.; Horne, R.N. Recurrent neural networks for permanent downhole gauge data analysis. In SPE Annual Technical Conference and Exhibition; Society of Petroleum Engineers: Calgary, AB, Canada, 2017. [Google Scholar] [CrossRef]
- Koschwitz, D.; Frisch, J.; Van Treeck, C. Data-driven heating and cooling load predictions for non-residential buildings based on support vector machine regression and NARX Recurrent Neural Network: A comparative study on district scale. Energy 2018, 165, 134–142. [Google Scholar] [CrossRef]
- Abou Rjeily, Y.; Abbas, O.; Sadek, M.; Shahrour, I.; Hage Chehade, F. Flood forecasting within urban drainage systems using NARX neural network. Water Sci. Technol. 2017, 76, 2401–2412. [Google Scholar] [CrossRef]
- Khalid, E.G.; Jamal, E.K.; Isam, S.; Aziz, S. Comparison of M5 Model Tree and Nonlinear Autoregressive with eXogenous inputs (NARX) Neural Network for urban stormwater discharge modelling. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2019; Volume 295, p. 02002. [Google Scholar] [CrossRef]
- Zainorzuli, S.M.; Abdullah, S.A.C.; Adnan, R.; Ruslan, F.A. Comparative Study of Elman Neural Network (ENN) and Neural Network Autoregressive with Exogenous Input (NARX) For Flood Forecasting. In Proceedings of the 2019 IEEE 9th Symposium on Computer Applications & Industrial Electronics (ISCAIE), Kota Kinabalu, Sabah, Malaysia, 27–28 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 11–15. [Google Scholar] [CrossRef]
- Chang, F.J.; Chen, P.A.; Lu, Y.R.; Huang, E.; Chang, K.Y. Real-time multi-step-ahead water level forecasting by recurrent neural networks for urban flood control. J. Hydrol. 2014, 517, 836–846. [Google Scholar] [CrossRef]
- Shen, H.Y.; Chang, L.C. Online multistep-ahead inundation depth forecasts by recurrent NARX networks. Hydrol. Earth Syst. Sci. 2013, 17, 935–945. [Google Scholar] [CrossRef] [Green Version]
- Chang, L.C.; Shen, H.Y.; Chang, F.J. Regional flood inundation nowcast using hybrid SOM and dynamic neural networks. J. Hydrol. 2014, 519, 476–489. [Google Scholar] [CrossRef]
- Chang, L.C.; Amin, M.Z.M.; Yang, S.N.; Chang, F.J. Building ANN-based regional multi-step-ahead flood inundation forecast models. Water 2018, 10, 1283. [Google Scholar] [CrossRef] [Green Version]
- Bande, S.; Shete, V.V. Smart flood disaster prediction system using IoT & neural networks. In Proceedings of the 2017 International Conference On Smart Technologies For Smart Nation (SmartTechCon), Bengaluru, India, 17–19 August 2017; IEEE: Piscataway, NJ, USA; pp. 189–194. [Google Scholar] [CrossRef]
- Babu, V.; Rajan, V. Flood and Earthquake Detection and Rescue Using IoT Technology. In Proceedings of the 2019 International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 17–19 July 2019; IEEE: Piscataway, NJ, USA; pp. 1256–1260. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, X.; Wang, L.; Min, G. Effective IoT-Facilitated Storm Surge Flood Modeling Based on Deep Reinforcement Learning. In IEEE Internet of Things Journal; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Han, K.; Zhang, D.; Bo, J.; Zhang, Z. Hydrological monitoring system design and implementation based on IOT. Phys. Procedia 2012, 33, 449–454. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Yang, X. An Automatic Online Disaster Monitoring Network: Network Architecture and a Case Study Monitoring Slope Stability. Int. J. Online Biomed. Eng. 2018, 14, 4–19. [Google Scholar] [CrossRef]
- Puttinaovarat, S.; Horkaew, P. Application Programming Interface for Flood Forecasting from Geospatial Big Data and Crowdsourcing Data. Int. J. Interact. Mob. Technol. 2019, 13, 137–156. [Google Scholar] [CrossRef]
- Basha, E.A.; Ravela, S.; Rus, D. Model-based monitoring for early warning flood detection. In SenSys ’08: Proceedings of the 6th ACM Conference on Embedded Network Sensor Systems; ACM: New York, NY, USA, 2008; pp. 295–308. [Google Scholar] [CrossRef] [Green Version]
- Mitra, P.; Ray, R.; Chatterjee, R.; Basu, R.; Saha, P.; Raha, S.; Barman, R.; Patra, S.; Biswas, S.S.; Saha, S. Flood forecasting using Internet of things and artificial neural networks. In Proceedings of the 2016 IEEE 7th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 13–15 October 2016; IEEE: Piscataway, NJ, USA; pp. 1–5. [Google Scholar] [CrossRef]
- Pasi, A.A.; Bhave, U. Flood detection system using wireless sensor network. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2015, 5. [Google Scholar] [CrossRef]
- Chang, L.C.; Chang, F.J.; Yang, S.N.; Kao, I.F.; Ku, Y.Y.; Kuo, C.L.; bin Mat, M.Z. Building an intelligent hydroinformatics integration platform for regional flood inundation warning systems. Water 2019, 11, 9. [Google Scholar] [CrossRef] [Green Version]
- Sood, S.K.; Sandhu, R.; Singla, K.; Chang, V. IoT, big data and HPC based smart flood management framework. Sustain. Comput. Inform. Syst. 2018, 20, 102–117. [Google Scholar] [CrossRef] [Green Version]
- Mishra, B.K.; Thakker, D.; Mazumdar, S.; Neagu, D.; Simpson, S. Using Deep Learning for IoT-enabled Smart Camera: A Use Case of Flood Monitoring. In Proceedings of the 2019 10th International Conference on Dependable Systems, Services and Technologies (DESSERT), Leeds, UK, 5–7 June 2019. [Google Scholar] [CrossRef]
- Bowden, G.J.; Dandy, G.C.; Maier, H.R. Input determination for neural network models in water resources applications. Part 1—background and methodology. J. Hydrol. 2005, 301, 75–92. [Google Scholar] [CrossRef]
- Galelli, S.; Humphrey, G.B.; Maier, H.R.; Castelletti, A.; Dandy, G.C.; Gibbs, M.S. An evaluation framework for input variable selection algorithms for environmental data-driven models. Environ. Model. Softw. 2014, 62, 33–51. [Google Scholar] [CrossRef] [Green Version]
- Hu, J.H.; Tsai, W.P.; Cheng, S.T.; Chang, F.J. Explore the relationship between fish community and environmental factors by machine learning techniques. Environ. Res. 2020, 184, 109262. [Google Scholar] [CrossRef] [PubMed]
- Muttil, N.; Chau, K.W. Machine-learning paradigms for selecting ecologically significant input variables. Eng. Appl. Artif. Intell. 2007, 20, 735–744. [Google Scholar] [CrossRef] [Green Version]
- Taormina, R.; Chau, K.W. Data-driven input variable selection for rainfall–runoff modeling using binary-coded particle swarm optimization and extreme learning machines. J. Hydrol. 2015, 529, 1617–1632. [Google Scholar] [CrossRef]
- Chang, F.J.; Chen, P.A.; Chang, L.C.; Tsai, Y.H. Estimating spatio-temporal dynamics of stream total phosphate concentration by soft computing techniques. Sci. Total Environ. 2016, 562, 228–236. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event Number | Event Name | Average Rainfall (mm/h) | Total Rainfall (mm) | Average Inundation (m) | Max Inundation (m) |
|---|---|---|---|---|---|
| Training phase (number of data: 391 h) | |||||
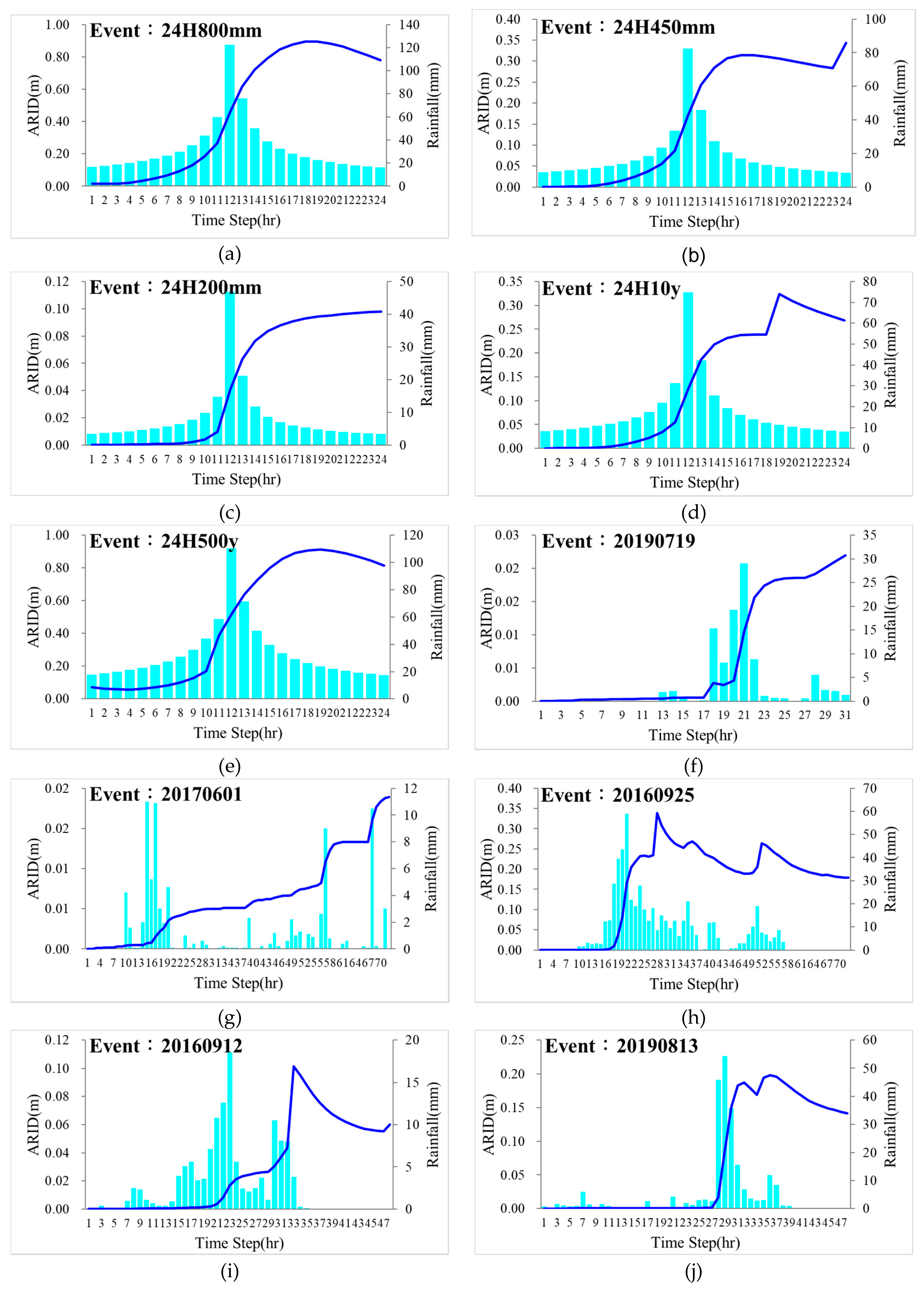
| 1 | 24H800 mm1 | 33.3 | 800 | 0.46 | 0.89 |
| 2 | 24H450 mm | 18.8 | 450.1 | 0.17 | 0.34 |
| 3 | 24H200 mm | 8.3 | 200 | 0.05 | 0.10 |
| 4 | 24H10 y | 17.4 | 417.6 | 0.14 | 0.32 |
| 5 | 24H500 y2 | 33.5 | 803.7 | 0.49 | 0.91 |
| 6 | 201907193 | 3.2 | 99.7 | 0.01 | 0.02 |
| 7 | 20170601 | 1.2 | 86.7 | 0.01 | 0.02 |
| 8 | 20160925 | 7.6 | 550.1 | 0.16 | 0.34 |
| 9 | 20160912 | 2.7 | 128.7 | 0.03 | 0.10 |
| 10 | 20190813 | 4.7 | 226.2 | 0.07 | 0.20 |
| Validation phase (number of data: 144 h) | |||||
| 11 | 24H50 y | 24.1 | 578 | 0.22 | 0.43 |
| 12 | 24H400 mm | 16.7 | 400 | 0.16 | 0.29 |
| 13 | 24H5 y | 14.4 | 344.8 | 0.11 | 0.27 |
| 14 | 20170613 | 1.4 | 100.2 | 0.01 | 0.03 |
| Testing phase (number of data: 96 h) | |||||
| 15 | 24H100 y | 26.9 | 646.1 | 0.26 | 0.52 |
| 16 | 24H2 y | 9.8 | 234.7 | 0.06 | 0.11 |
| 17 | 24H500 mm | 20.9 | 500.5 | 0.17 | 0.34 |
| 18 | 24H300 mm | 12.5 | 300 | 0.11 | 0.25 |
| Parameters | Model 1 | Model 2 | Model 3 |
|---|---|---|---|
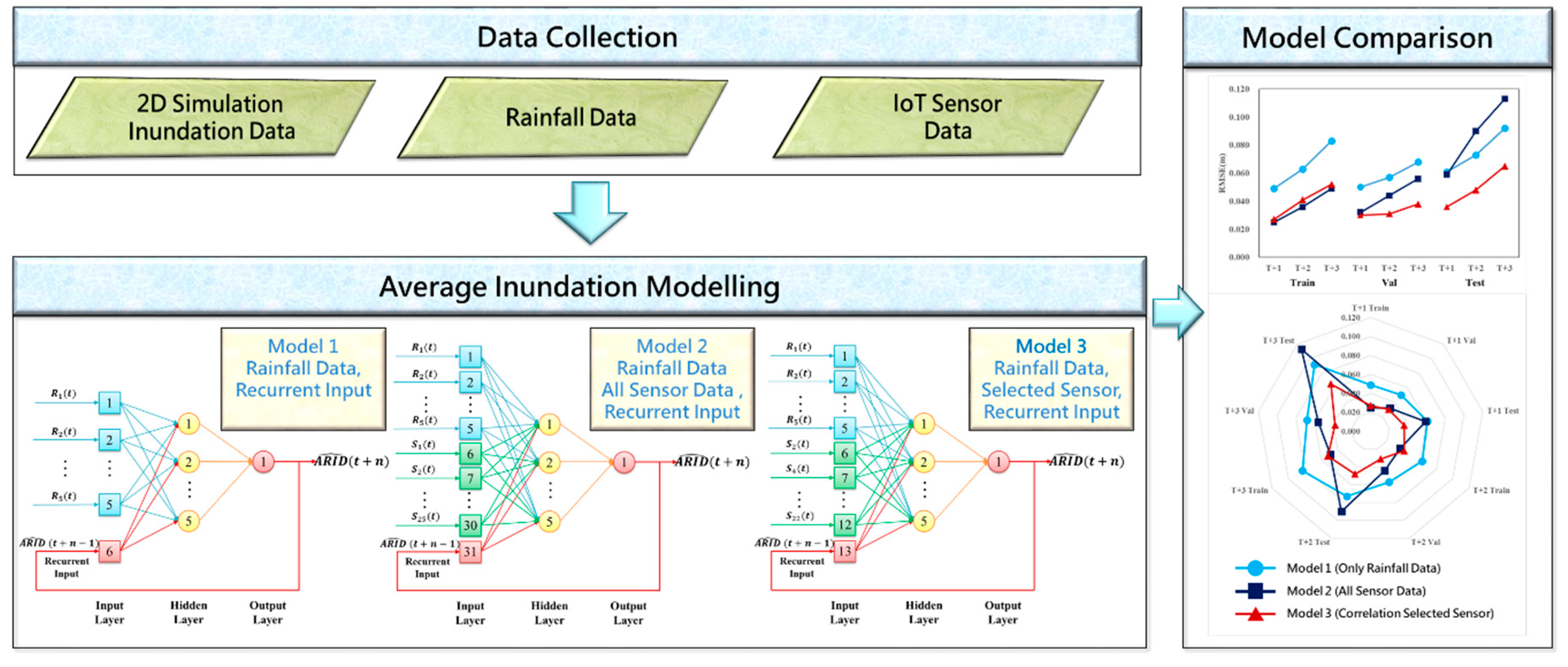
| Input | 1. Rainfall Data 2. Recurrent Model Output | 1. Rainfall Data 2. All Sensor Data 3. Recurrent Model Output | 1. Rainfall Data 2. Correlation Selected Sensor 3. Recurrent Model Output |
| Input Dimension Counts | Rainfall = 5 Sensor = 0 Recurrent = 1 | Rainfall = 5 Sensor = 25 Recurrent = 1 | Rainfall = 5 Sensor = 7 Recurrent = 1 |
| Hidden Neuron Counts | 5 | 5 | 5 |
| Weights Counts | 41 | 166 | 76 |
| Model | RMSE (m) | R2 | NSE | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Time Step | Train | Val | Test | Train | Val | Test | Train | Val | Test | |
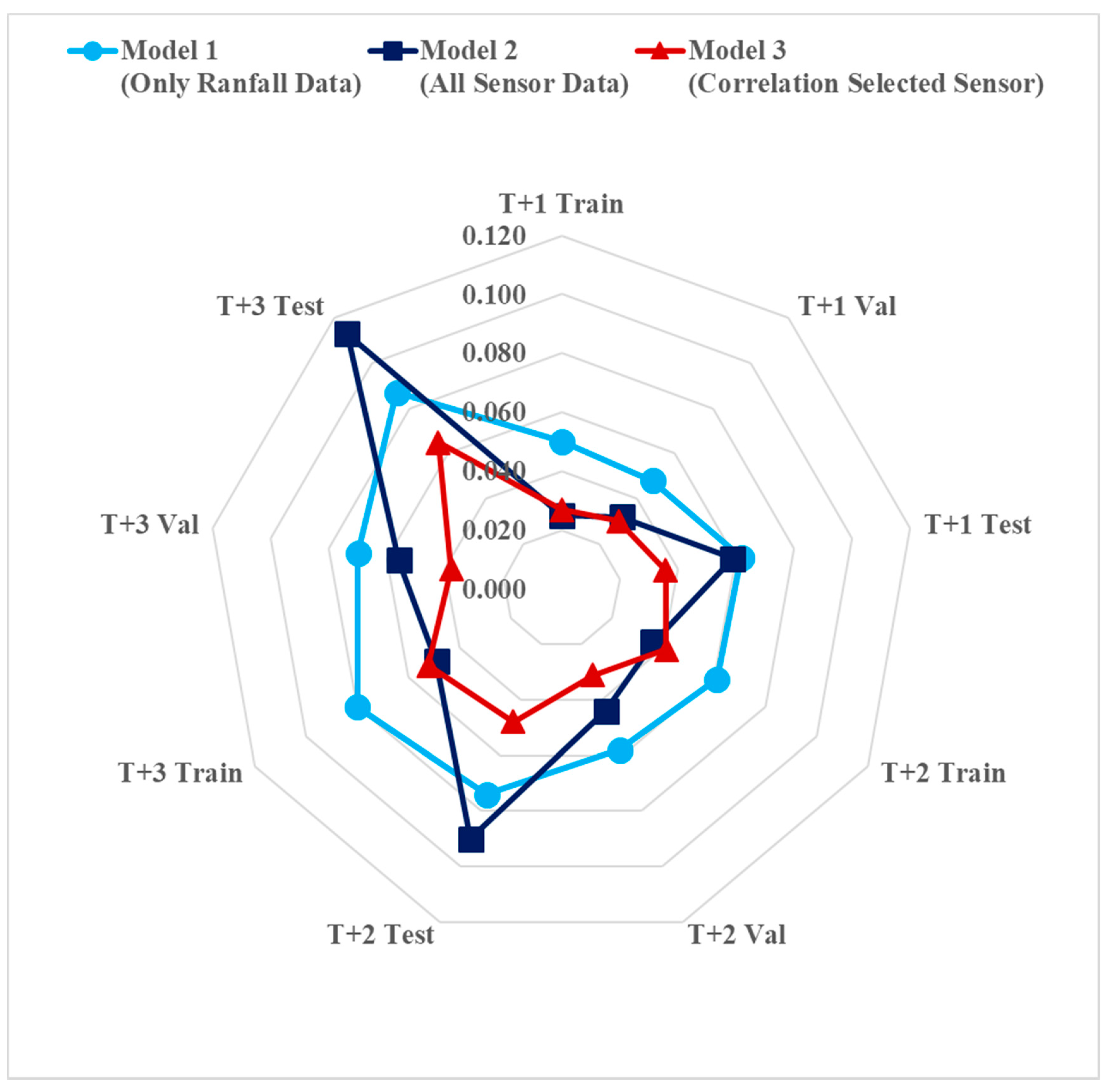
| Model 1 | T + 1 | 0.049 | 0.050 | 0.061 | 0.940 | 0.920 | 0.860 | 0.943 | 0.867 | 0.858 |
| T + 2 | 0.063 | 0.057 | 0.073 | 0.910 | 0.930 | 0.900 | 0.917 | 0.805 | 0.792 | |
| T + 3 | 0.083 | 0.068 | 0.092 | 0.860 | 0.870 | 0.830 | 0.859 | 0.723 | 0.710 | |
| Model 2 | T + 1 | 0.025 | 0.032 | 0.059 | 0.991 | 0.953 | 0.873 | 0.986 | 0.939 | 0.864 |
| T + 2 | 0.036 | 0.044 | 0.090 | 0.981 | 0.899 | 0.696 | 0.971 | 0.887 | 0.685 | |
| T + 3 | 0.049 | 0.056 | 0.113 | 0.965 | 0.828 | 0.539 | 0.947 | 0.822 | 0.510 | |
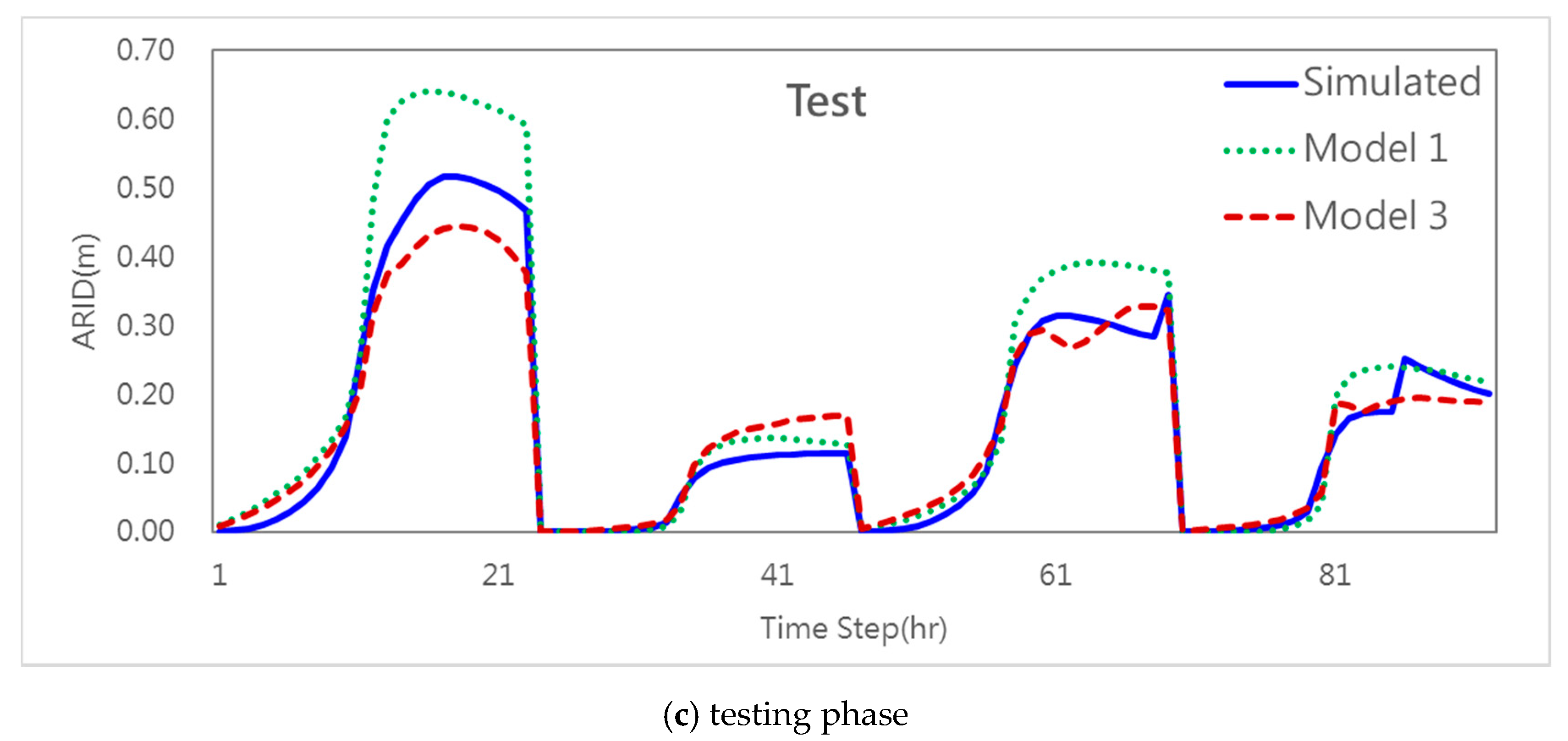
| Model 3 | T + 1 | 0.027 | 0.030 | 0.036 | 0.986 | 0.968 | 0.967 | 0.984 | 0.947 | 0.951 |
| T + 2 | 0.041 | 0.031 | 0.048 | 0.964 | 0.954 | 0.931 | 0.963 | 0.946 | 0.913 | |
| T + 3 | 0.052 | 0.038 | 0.065 | 0.941 | 0.922 | 0.900 | 0.939 | 0.916 | 0.839 | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, S.-N.; Chang, L.-C. Regional Inundation Forecasting Using Machine Learning Techniques with the Internet of Things. Water 2020, 12, 1578. https://doi.org/10.3390/w12061578
Yang S-N, Chang L-C. Regional Inundation Forecasting Using Machine Learning Techniques with the Internet of Things. Water. 2020; 12(6):1578. https://doi.org/10.3390/w12061578
Chicago/Turabian StyleYang, Shun-Nien, and Li-Chiu Chang. 2020. "Regional Inundation Forecasting Using Machine Learning Techniques with the Internet of Things" Water 12, no. 6: 1578. https://doi.org/10.3390/w12061578
APA StyleYang, S. -N., & Chang, L. -C. (2020). Regional Inundation Forecasting Using Machine Learning Techniques with the Internet of Things. Water, 12(6), 1578. https://doi.org/10.3390/w12061578