
Understanding the Mechanical Biases of Tipping-Bucket Rain Gauges: A Semi-Analytical Calibration Approach

 ,
,  ,
, 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Tipping Bucket Rain Gauge Characteristics
2.2. Rain Gauge Calibration
2.2.1. Static and Dynamic Calibrations
2.2.2. Semi-Analytical Calibration
2.2.3. Simplified Method
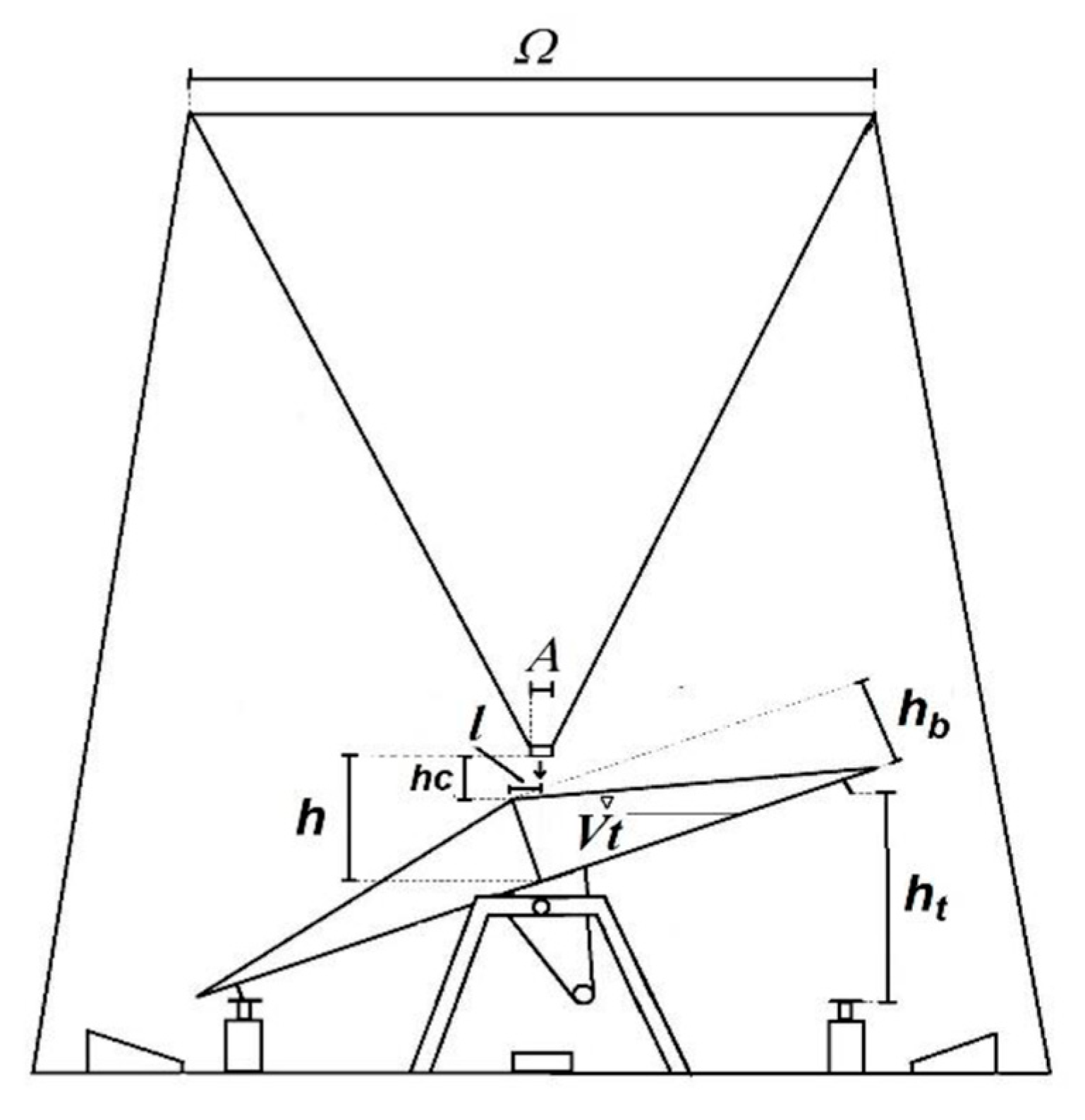
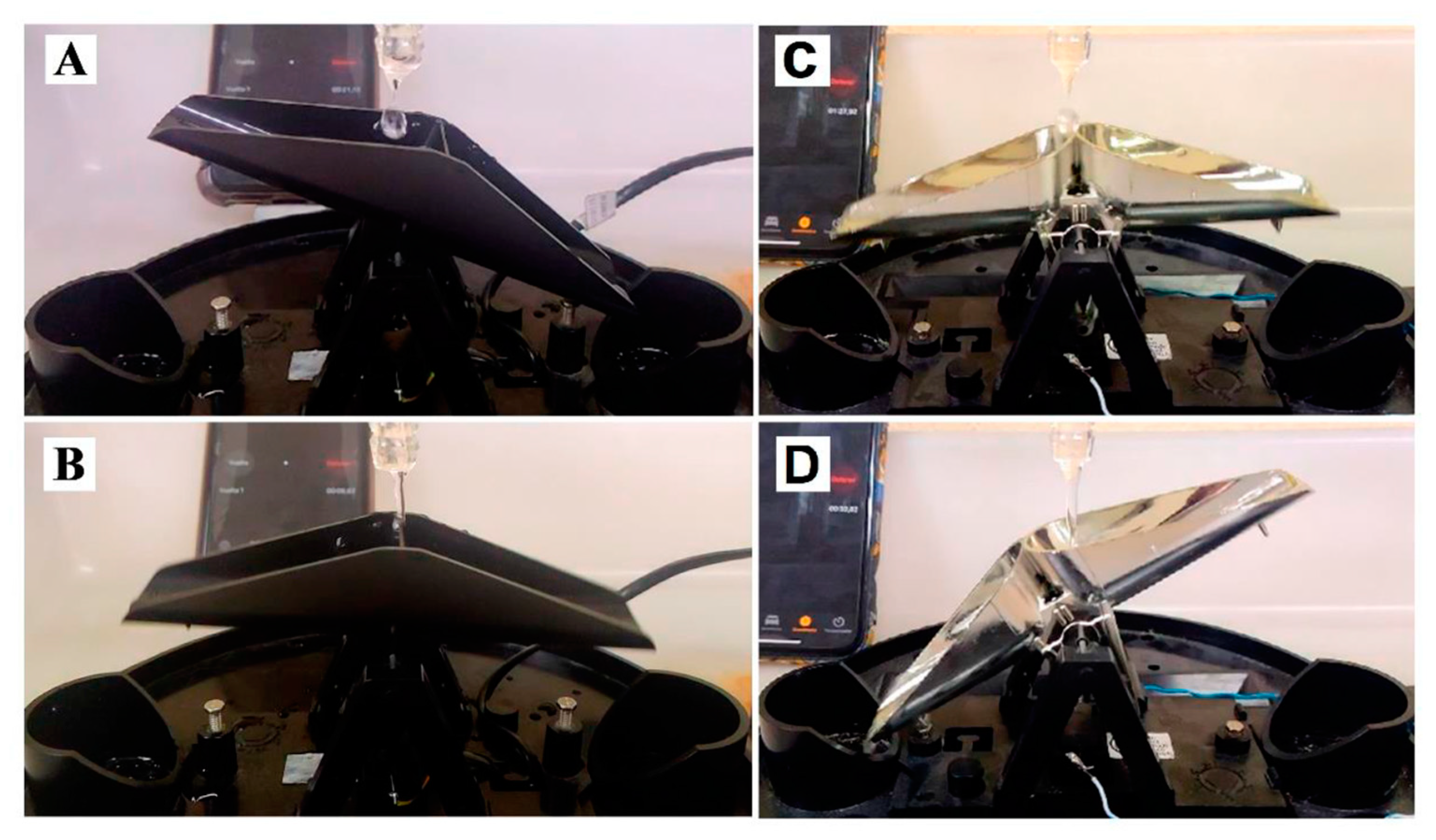
2.2.4. Tipping Movement Characterization
2.3. Mechanical Biases under Real Field Conditions
3. Results
3.1. Dynamic Calibration
3.2. Semi-Analytical Calibration
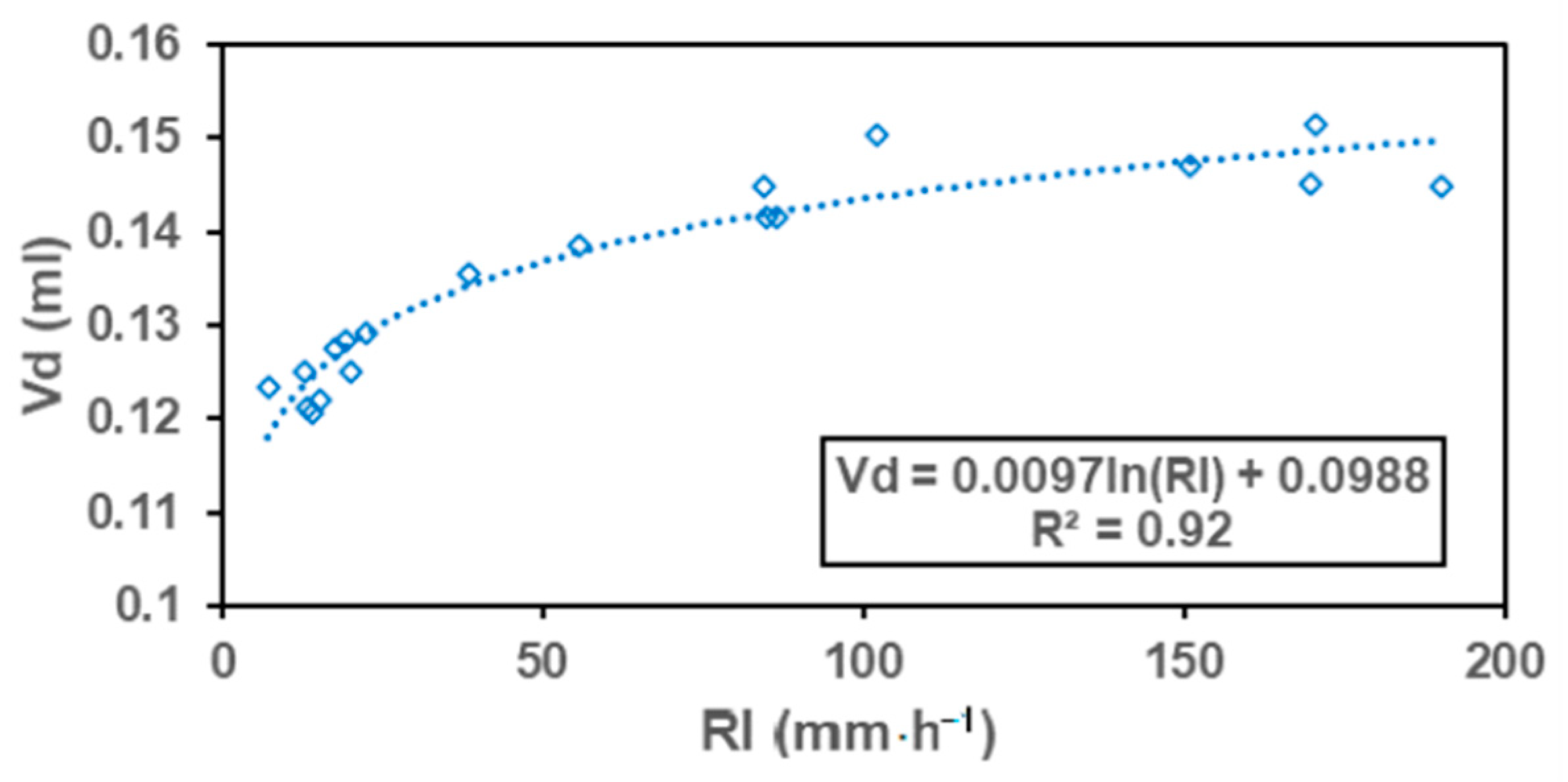
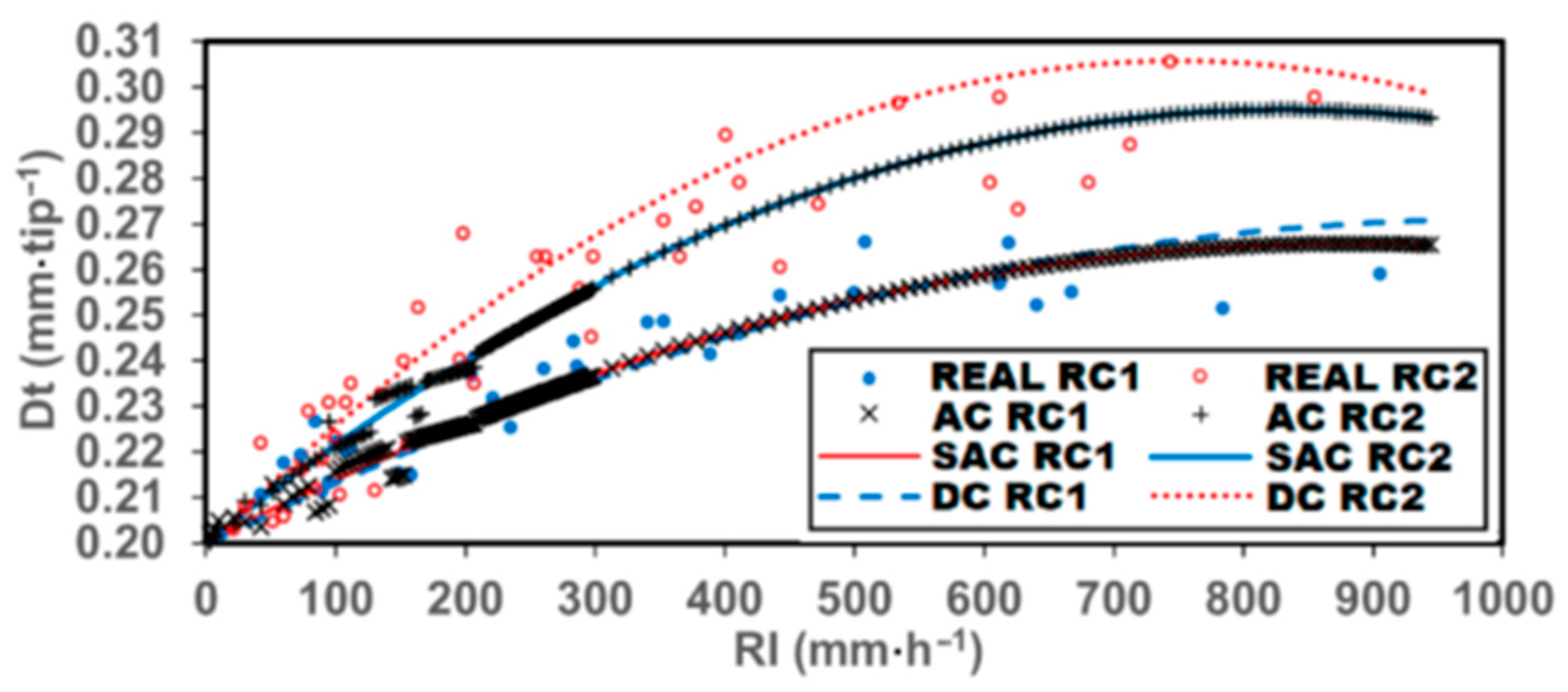
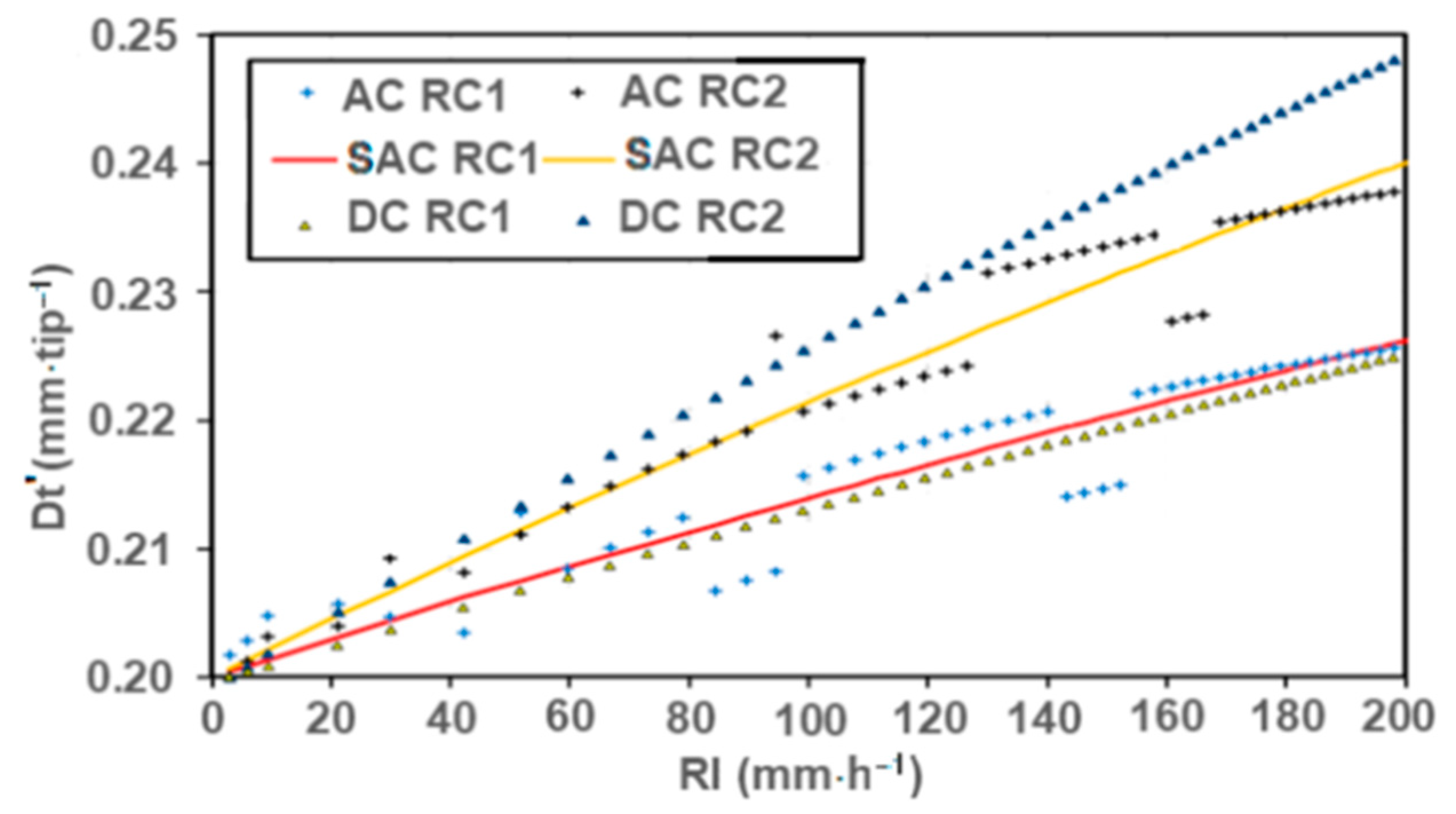
3.2.1. Drop Size
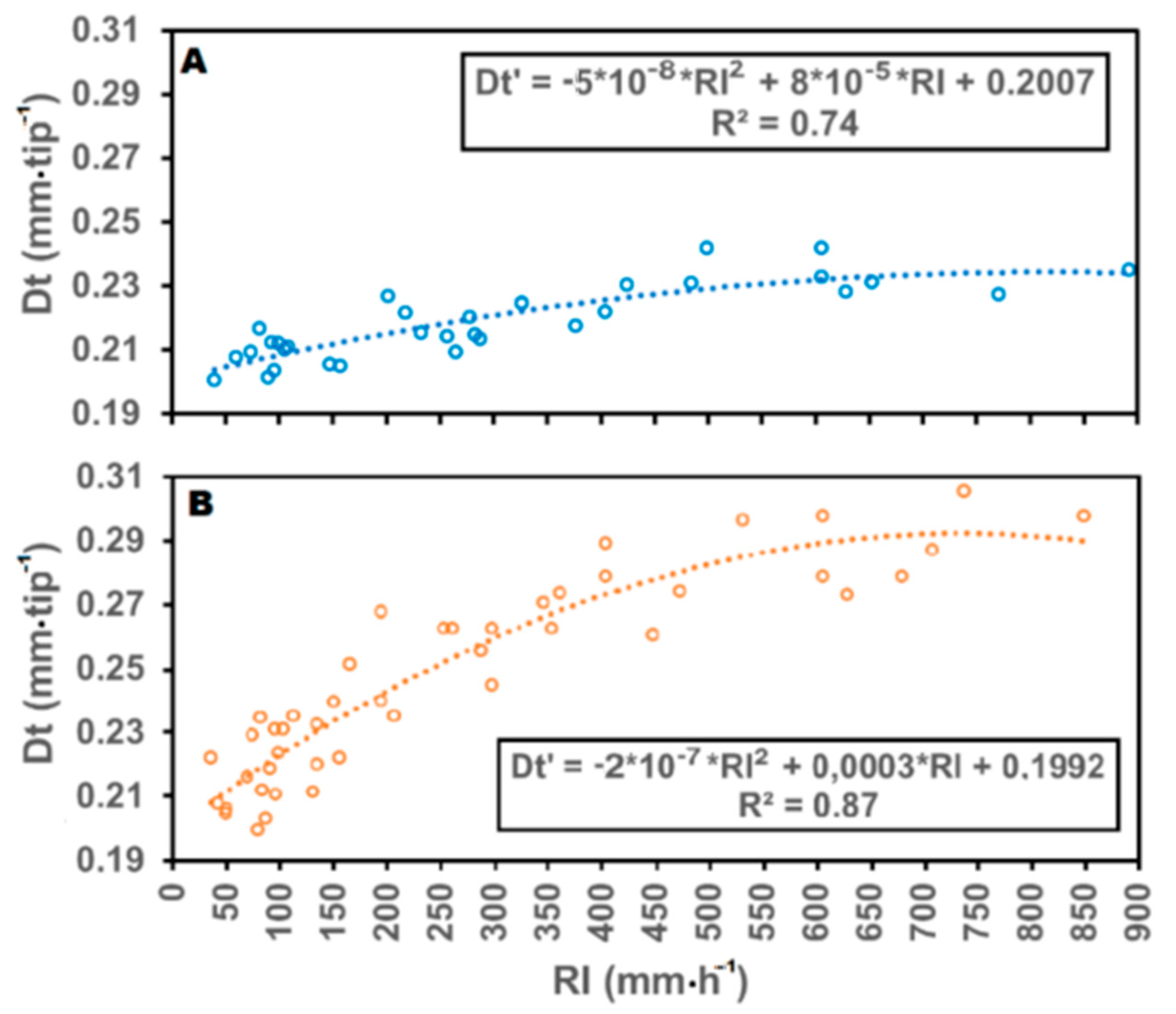
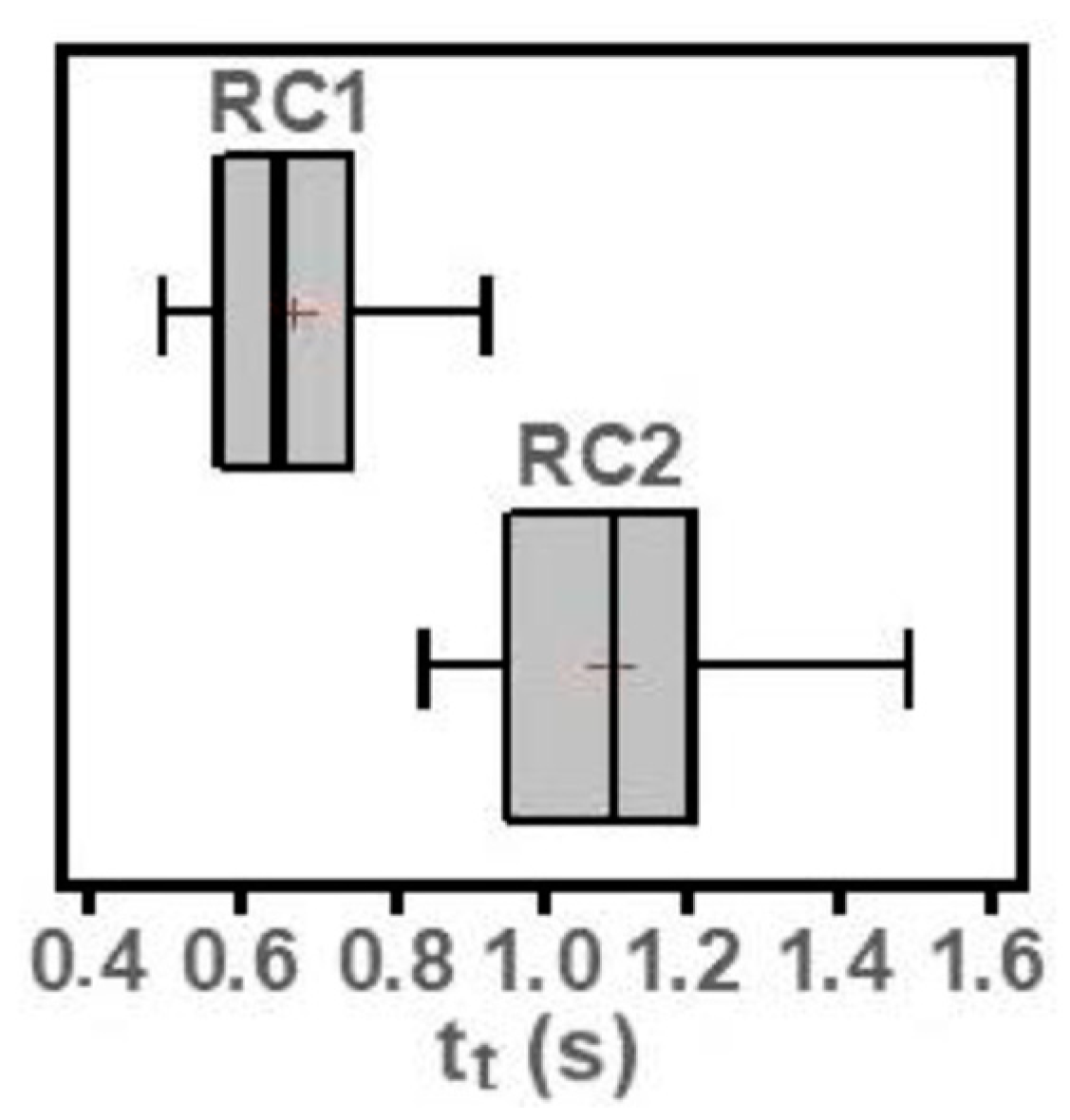
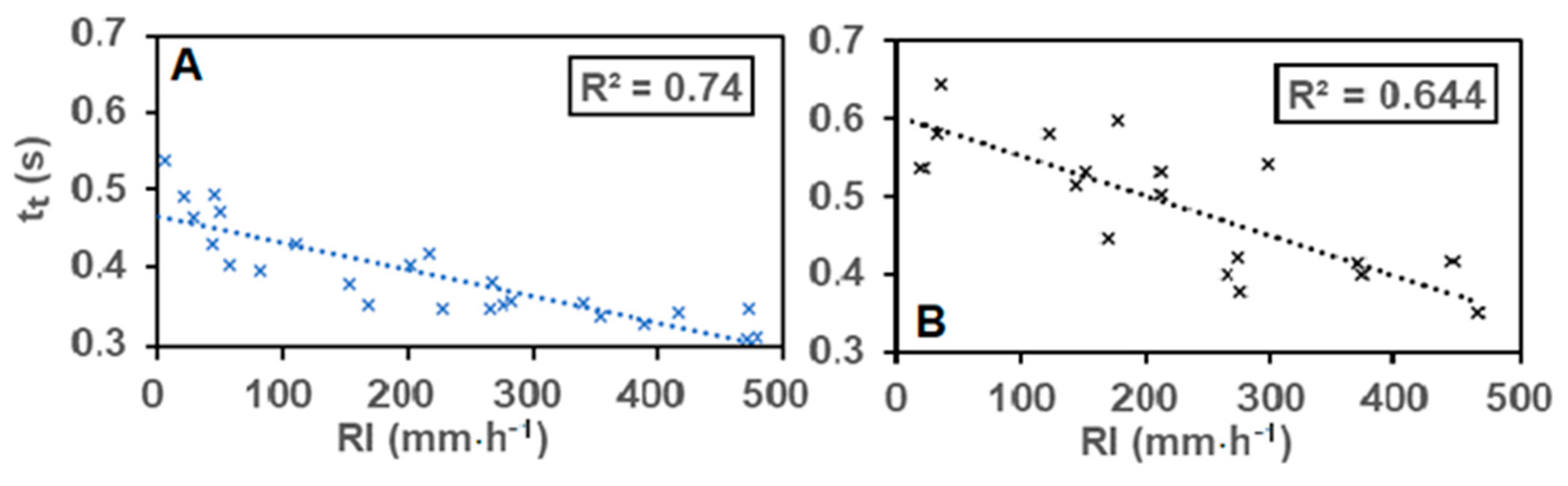
3.2.2. Tipping Time
3.2.3. Surplus Water
3.3. Root Mean Square Error
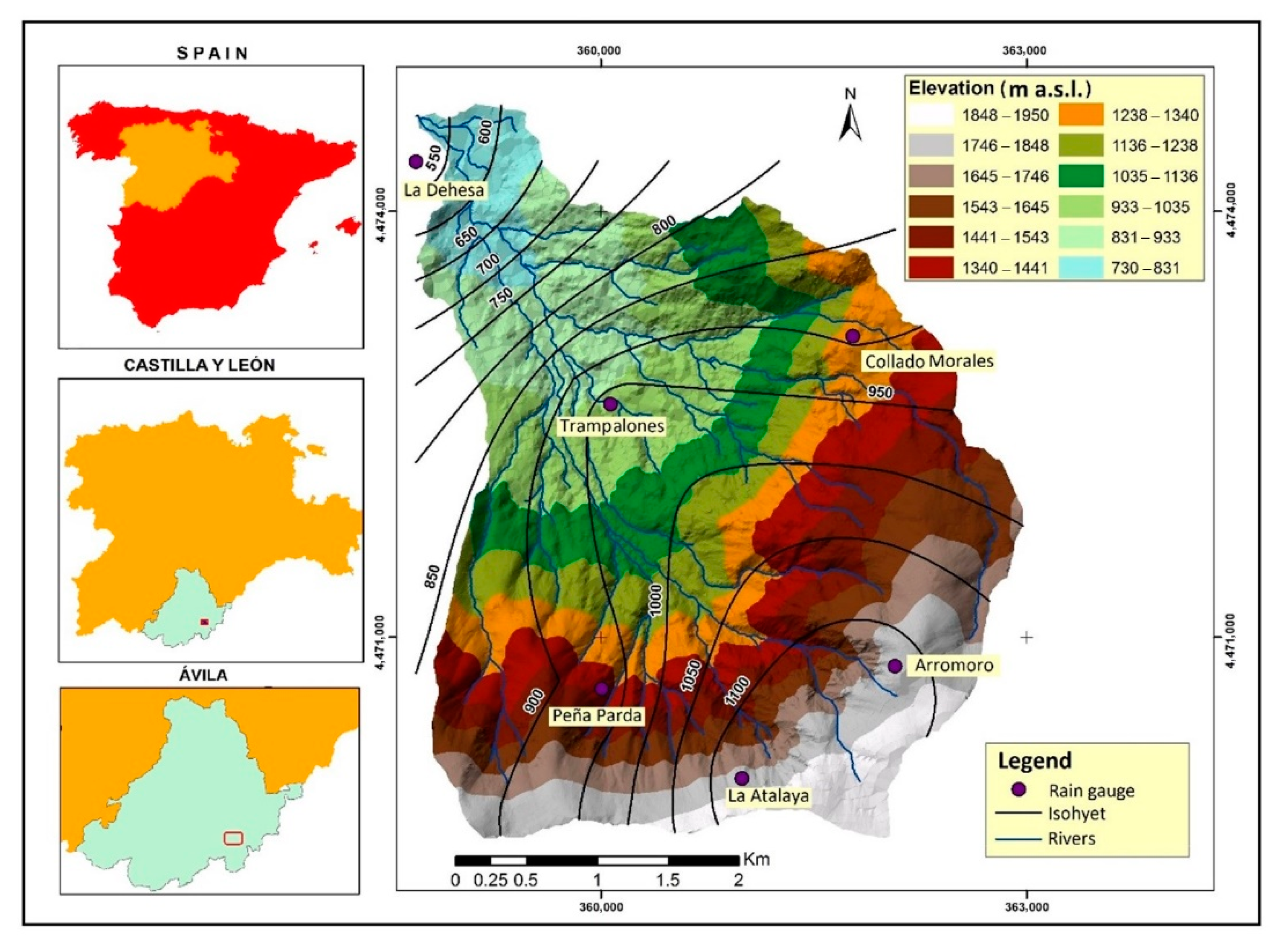
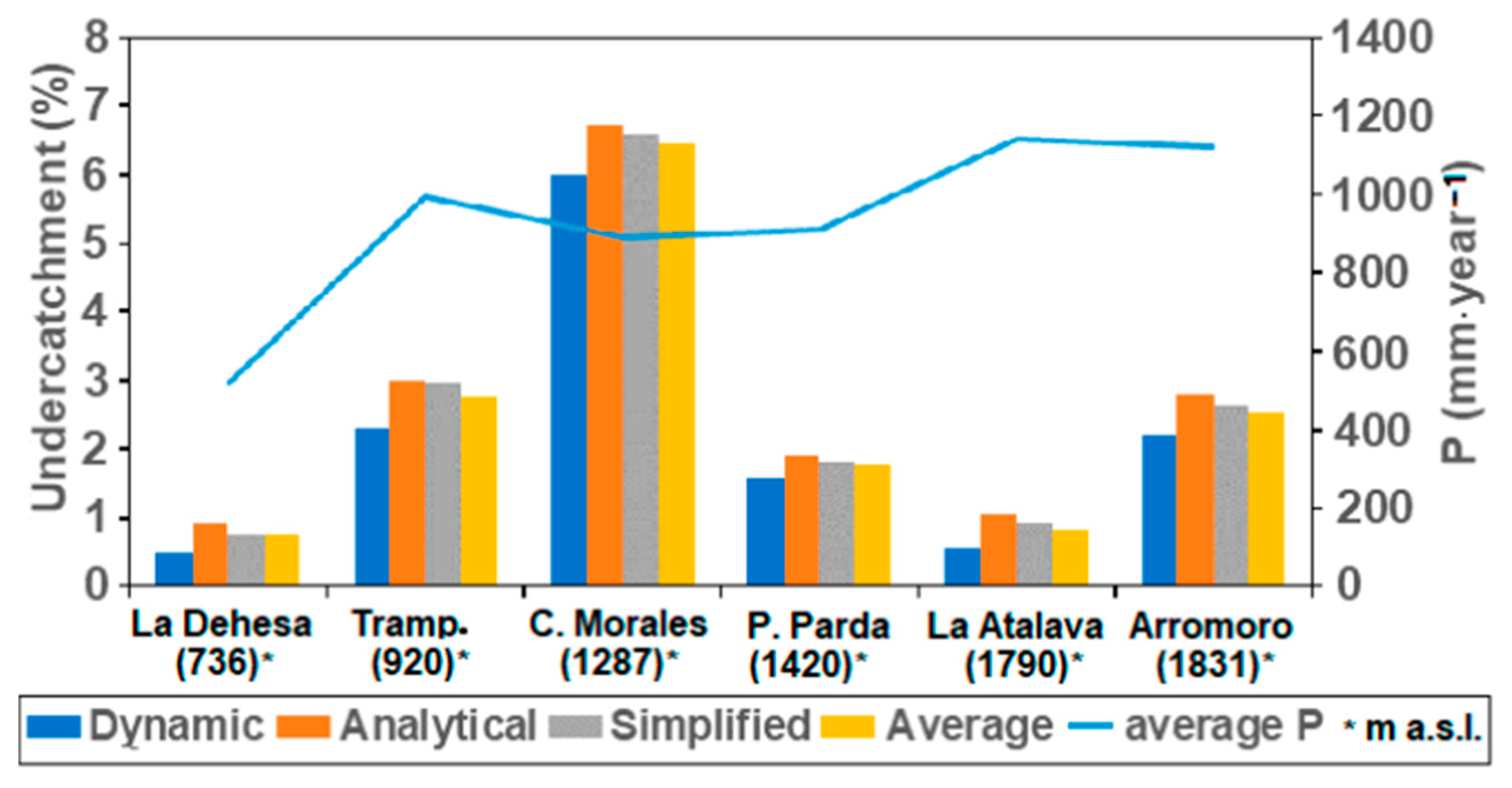
3.4. Assessment of the Rainfall Measurement Errors in Venero Claro Mountain Basin
4. Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kim, J.; Han, H. Evaluation of the CMORPH high-resolution precipitation product for hydrological applications over South Korea. Atmos. Res. 2021, 258, 105650. [Google Scholar] [CrossRef]
- Biswas, A.K. History of Hydrology; Elsevier Science Limited: Amsterdam, The Netherlands, 1970. [Google Scholar]
- Gnecco, I.; Palla, A.; La Barbera, P. A dimensionless approach for the runoff peak assessment: Effects of the rainfall event structure. Hydrol. Earth Syst. Sci. 2018, 22, 943–956. [Google Scholar] [CrossRef] [Green Version]
- Habib, E.H.; Meselhe, E.A.; Aduvala, A. V Effect of local errors of tipping-bucket rain gauges on rainfall-runoff simulations. J. Hydrol. Eng. 2008, 13, 488–496. [Google Scholar] [CrossRef]
- Villarini, G.; Mandapaka, P.V.; Krajewski, W.F.; Moore, R.J. Rainfall and sampling uncertainties: A rain gauge perspective. J. Geophys. Res. Atmos. 2008, 113, 1–12. [Google Scholar] [CrossRef]
- Agarwal, A.; Mishra, S.K.; Ram, S.; Singh, J.K. Simulation of Runoff and Sediment Yield using Artificial Neural Networks. Biosyst. Eng. 2006, 94, 597–613. [Google Scholar] [CrossRef]
- Pasculli, A.; Cinosi, J.; Turconi, L.; Sciarra, N. Learning case study of a shallow-water model to assess an early-warning system for fast alpine muddy-debris-flow. Water 2021, 13, 750, ISBN 3908713556159. [Google Scholar] [CrossRef]
- Bowman, K.P. Comparison of TRMM precipitation retrievals with rain gauge data from ocean buoys. J. Clim. 2005, 18, 178–190. [Google Scholar] [CrossRef]
- Tapiador, F.J.; Navarro, A.; García-Ortega, E.; Merino, A.; Sánchez, J.L.; Marcos, C.; Kummerow, C. The Contribution of Rain Gauges in the Calibration of the IMERG Product: Results from the First Validation over Spain. J. Hydrometeorol. 2020, 21, 161–182. [Google Scholar] [CrossRef]
- Borup, M.; Grum, M.; Linde, J.J.; Mikkelsen, P.S. Dynamic gauge adjustment of high-resolution X-band radar data for convective rain storms: Model-based evaluation against measured combined sewer overflow. J. Hydrol. 2016, 539, 687–699. [Google Scholar] [CrossRef] [Green Version]
- Ochoa-Rodriguez, S.; Wang, L.P.; Willems, P.; Onof, C. A Review of Radar-Rain Gauge Data Merging Methods and Their Potential for Urban Hydrological Applications. Water Resour. Res. 2019, 55, 6356–6391. [Google Scholar] [CrossRef]
- Todini, E. A Bayesian technique for conditioning radar precipitation estimates to rain-gauge measurements. Hydrol. Earth Syst. Sci. 2001, 5, 187–199. [Google Scholar] [CrossRef] [Green Version]
- Tokay, A.; Bashor, P.G.; McDowell, V.L. Comparison of rain gauge measurements in the mid-atlantic region. J. Hydrometeorol. 2010, 11, 553–565. [Google Scholar] [CrossRef]
- Habib, E.; Krajewski, W.F.; Kruger, A. Sampling errors of tipping-bucket rain gauge measurements. J. Hydrol. Eng. 2001, 6, 159–166. [Google Scholar] [CrossRef]
- Sexton, A.M.; Sadeghi, A.M.; Zhang, X.; Srinivasan, R.; Shirmohammadi, A. Using NEXRAD and rain gauge precipitation data for hydrologic calibration of SWAT in a northeastern watershed. Trans. ASABE 2010, 53, 1501–1510. [Google Scholar] [CrossRef]
- Sun, X.; Mein, R.G.; Keenan, T.D.; Elliott, J.F. Flood estimation using radar and raingauge data. J. Hydrol. 2000, 239, 4–18. [Google Scholar] [CrossRef]
- Humphrey, M.D.; Istok, J.D.; Lee, J.Y.; Hevesi, J.A.; Flint, A.L. A New Method for Automated Dynamic Calibration of Tipping-Bucket Rain Gauges. J. Atmos. Ocean. Technol. 1997, 14, 1513–1519. [Google Scholar] [CrossRef]
- Marsalek, J. Calibration of the tipping-bucket raingage. J. Hydrol. 1981, 53, 343–354. [Google Scholar] [CrossRef]
- WMO. Guide to Meteorological Instruments and Methods of Observation (WMO-No. 8); World Meteorological Organization: Geneva, Switzerland, 2008. [Google Scholar]
- Cauteruccio, A.; Colli, M.; Freda, A.; Stagnaro, M.; Lanza, L.G. The role of free-stream turbulence in attenuating the wind updraft above the collector of precipitation gauges. J. Atmos. Ocean. Technol. 2020, 37, 103–113. [Google Scholar] [CrossRef]
- Duchon, C.E.; Biddle, C.J. Undercatch of tipping-bucket gauges in high rain rate events. Adv. Geosci. 2010, 25, 11–15. [Google Scholar] [CrossRef] [Green Version]
- Hoffmann, M.; Schwartengräber, R.; Wessolek, G.; Peters, A. Comparison of simple rain gauge measurements with precision lysimeter data. Atmos. Res. 2016, 174–175, 120–123. [Google Scholar] [CrossRef]
- Michelson, D.B. Systematic correction of precipitation gauge observations using analyzed meteorological variables. J. Hydrol. 2004, 290, 161–177. [Google Scholar] [CrossRef]
- Sevruk, B.; Ondrás, M.; Chvíla, B. The WMO precipitation measurement intercomparisons. Atmos. Res. 2009, 92, 376–380. [Google Scholar] [CrossRef]
- Molini, A.; La Barbera, P.; Lanza, L.G.; Stagi, L. Rainfall intermittency and the sampling error of tipping-bucket rain gauges. Phys. Chem. Earth Part C Solar Terr. Planet. Sci. 2001, 26, 737–742. [Google Scholar] [CrossRef]
- Ren, Z.; Li, M. Errors and correction of precipitation measurements in China. Adv. Atmos. Sci. 2007, 24, 449–458. [Google Scholar] [CrossRef]
- Duchon, C.E.; Essenberg, G.R. Comparative rainfall observations from pit and aboveground rain gauges with and without wind shields. Water Resour. Res. 2001, 37, 3253–3263. [Google Scholar] [CrossRef] [Green Version]
- Simić, M.M. Effect of the siphon control on the dynamic characteristics of a tipping bucket raingauge. Hydrol. Sci. J. 1994, 39, 35–46. [Google Scholar] [CrossRef]
- Niemczynowicz, J. The Dynamic Calibration of Tipping-Bucket Raingauges. Hydrol. Res. 1986, 17, 203–214. [Google Scholar] [CrossRef]
- Calder, I.R.; Kidd, C.H.R. A note on the dynamic calibration of tipping-bucket gauges. J. Hydrol. 1978, 39, 383–386. [Google Scholar] [CrossRef]
- Costello, T.A.; Williams, H.J. Short duration rainfall intensity measured using calibrated time-of-tip data from a tipping bucket raingage. Agric. For. Meteorol. 1991, 57, 144–155. [Google Scholar] [CrossRef]
- Luyckx, G.; Berlamont, J. Simplified method to correct rainfall measurements from tipping bucket rain gauges. Urban Drain. Model. 2001, 767–776. [Google Scholar] [CrossRef]
- Shedekar, V.S.; King, K.W.; Fausey, N.R.; Soboyejo, A.B.O.; Harmel, R.D.; Brown, L.C. Assessment of measurement errors and dynamic calibration methods for three different tipping bucket rain gauges. Atmos. Res. 2016, 178–179, 445–458. [Google Scholar] [CrossRef] [Green Version]
- Shimizu, T.; Kobayashi, M.; Iida, S.; Levia, D.F. A generalized correction equation for large tipping-bucket flow meters for use in hydrological applications. J. Hydrol. 2018, 563, 1051–1056. [Google Scholar] [CrossRef]
- Sypka, P. Dynamic real-time volumetric correction for tipping-bucket rain gauges. Agric. For. Meteorol. 2019, 271, 158–167. [Google Scholar] [CrossRef]
- Kohfahl, C.; Saaltink, M.W. Comparing precision lysimeter rainfall measurements against rain gauges in a coastal dune belt, Spain. J. Hydrol. 2020, 591, 125580. [Google Scholar] [CrossRef]
- Vasvári, V. Calibration of tipping bucket rain gauges in the Graz urban research area. Atmos. Res. 2005, 77, 18–28. [Google Scholar] [CrossRef]
- Wang, J.; Fisher, B.L.; Wolff, D.B. Estimating rain rates from tipping-bucket rain gauge measurements. J. Atmos. Ocean. Technol. 2008, 25, 43–56. [Google Scholar] [CrossRef] [Green Version]
- Bergmann, H.; Breinhälter, H.; Hable, O.; Krainer, R. Calibration of tipping bucket hyetographs. Phys. Chem. Earth, Part C Solar, Terr. Planet. Sci. 2001, 26, 731–736. [Google Scholar] [CrossRef]
- Ciach, G.J. Local random errors in tipping-bucket rain gauge measurements. J. Atmos. Ocean. Technol. 2003, 20, 752–759. [Google Scholar] [CrossRef]
- Colli, M.; Lanza, L.G.; La Barbera, P.; Chan, P.W. Measurement accuracy of weighing and tipping-bucket rainfall intensity gauges under dynamic laboratory testing. Atmos. Res. 2014, 144, 186–194. [Google Scholar] [CrossRef]
- Fankhauser, R. Measurement properties of tipping bucket rain gauges and their influence on urban runoff simulation. Water Sci. Technol. 1997, 36, 7–12. [Google Scholar] [CrossRef]
- La Barbera, P.; Lanza, L.G.; Stagi, L. Tipping bucket mechanical errors and their influence on rainfall statistics and extremes. Water Sci. Technol. 2002, 45, 1–9. [Google Scholar] [CrossRef]
- Liao, M.; Liao, A.; Liu, J.; Cai, Z.; Liu, H.; Ma, T. A novel method and system for the fast calibration of tipping bucket rain gauges. J. Hydrol. 2020, 125782. [Google Scholar] [CrossRef]
- Molini, A.; Lanza, L.G.; La Barbera, P. Improving the accuracy of tipping-bucket rain records using disaggregation techniques. Atmos. Res. 2005, 77, 203–217. [Google Scholar] [CrossRef]
- Song, Y.; Han, D.; Rico-Ramirez, M.A. High Temporal Resolution Rainfall Information Retrieval from Tipping-Bucket Rain Gauge Measurements. Procedia Eng. 2016, 154, 1193–1200. [Google Scholar] [CrossRef] [Green Version]
- Davis Instruments Corp. Rain Collector 7852. Available online: www.davisinstruments.com/product_documents/weather/manuals/07395-334_IM_7852.pdf (accessed on 16 June 2021).
- Davis Instruments Corp. Installation Manual: Rain Collector II. Available online: www.davisnet.com/product_documents/weather/manuals/07395-224_IM_7852.pdf (accessed on 16 June 2021).
- Ruiz-Villanueva, V.; Bodoque, J.M.; Díez-Herrero, A.; Eguibar, M.A.; Pardo-Igúzquiza, E. Reconstruction of a flash flood with large wood transport and its influence on hazard patterns in an ungauged mountain basin. Hydrol. Process. 2013, 27, 3424–3437. [Google Scholar] [CrossRef]
- Molini, A.; Lanza, L.G.; La Barbera, P. The impact of tipping-bucket raingauge measurement errors on design rainfall for urban-scale applications. Hydrol. Process. 2005, 19, 1073–1088. [Google Scholar] [CrossRef]
- Muñoz, P.; Célleri, R.; Feyen, J. Effect of the resolution of tipping-bucket rain gauge and calculation method on rainfall intensities in an andean mountain gradient. Water 2016, 8, 534. [Google Scholar] [CrossRef] [Green Version]
- Marra, F.; Borga, M.; Morin, E. A Unified Framework for Extreme Subdaily Precipitation Frequency Analyses Based on Ordinary Events. Geophys. Res. Lett. 2020, 47, e2020GL091498. [Google Scholar] [CrossRef]
- Kochendorfer, J.; Earle, M.E.; Hodyss, D.; Reverdin, A.; Roulet, Y.A.; Nitu, R.; Rasmussen, R.; Landolt, S.; Buisán, S.; Laine, T. Undercatch adjustments for tipping-bucket gauge measurements of solid precipitation. J. Hydrometeorol. 2020, 21, 1193–1205. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| METHOD | RC1 | RC2 | ||||||
|---|---|---|---|---|---|---|---|---|
| 0–100 | 100–200 | 200–900 | 0–900 | 0–100 | 100–200 | 200–900 | 0–900 | |
| Simplified | 2.7 | 3.3 | 7.8 | 6.6 | 5.2 | 6.0 | 6.5 | 6.3 |
| S-analytical | 2.0 | 3.3 | 7.8 | 6.6 | 5.1 | 6.3 | 6.5 | 6.4 |
| Dynamic | 2.6 | 2.9 | 3.1 | 2.9 | 5.8 | 6.3 | 9.3 | 7.8 |
| Static | 4.8 | 6.2 | 13.2 | 10.9 | 9.4 | 14.5 | 38.0 | 28.0 |
| RI Intervals (mm·h−1) | Arromoro (%) | Collado Morales (%) | La Atalaya (%) | La Dehesa (%) | Peña Parda (%) | Trampalones (%) |
|---|---|---|---|---|---|---|
| 0–10 | 64.64 | 53.75 | 63.89 | 67.14 | 67.18 | 32.90 |
| 10–20 | 4.52 | 9.28 | 3.42 | 3.48 | 8.50 | 4.67 |
| 20–40 | 1.68 | 6.70 | 2.62 | 3.32 | 6.57 | 4.83 |
| 40–60 | 0.00 | 2.63 | 3.14 | 1.21 | 2.12 | 6.73 |
| 60–100 | 1.44 | 1.87 | 4.68 | 0.00 | 1.96 | 14.22 |
| 100–150 | 5.37 | 1.40 | 1.79 | 5.46 | 1.18 | 9.24 |
| 150–200 | 0.00 | 0.00 | 3.93 | 3.64 | 3.09 | 4.71 |
| >200 | 21.84 | 24.36 | 16.54 | 15.74 | 10.50 | 22.69 |
| ZONE | CALIBRATION METHOD | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Static | Dynamic | Semi-Analytical | Simplified | |||||||
| Total | mm | % | Total | mm | % | Total | mm | % | ||
| Arromoro | 10,888.9 | 11,126.3 | 237.4 | 2.2 | 11,191.3 | 302.4 | 2.8 | 11,177.8 | 288.9 | 2.7 |
| C. Morales | 10,432.3 | 11,058.9 | 626.6 | 6.0 | 11,133.3 | 701.0 | 6.7 | 11,119.1 | 686.8 | 6.6 |
| La Dehesa | 5515.4 | 5541.6 | 26.2 | 0.5 | 5567.2 | 51.8 | 0.9 | 5558.3 | 42.9 | 0.8 |
| Peña Parda | 12,869.8 | 13,072.3 | 202.5 | 1.6 | 13,117.7 | 247.9 | 1.9 | 13,100.4 | 230.6 | 1.8 |
| La Atalaya | 14,412.2 | 14,489.5 | 77.3 | 0.5 | 14,561.7 | 149.5 | 1.0 | 14,542.4 | 130.2 | 0.9 |
| Trampalones | 7840.8 | 8021.6 | 180.8 | 2.3 | 8077.0 | 236.2 | 3.0 | 8072.4 | 231.6 | 3.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Segovia-Cardozo, D.A.; Rodríguez-Sinobas, L.; Díez-Herrero, A.; Zubelzu, S.; Canales-Ide, F. Understanding the Mechanical Biases of Tipping-Bucket Rain Gauges: A Semi-Analytical Calibration Approach. Water 2021, 13, 2285. https://doi.org/10.3390/w13162285
Segovia-Cardozo DA, Rodríguez-Sinobas L, Díez-Herrero A, Zubelzu S, Canales-Ide F. Understanding the Mechanical Biases of Tipping-Bucket Rain Gauges: A Semi-Analytical Calibration Approach. Water. 2021; 13(16):2285. https://doi.org/10.3390/w13162285
Chicago/Turabian StyleSegovia-Cardozo, Daniel A., Leonor Rodríguez-Sinobas, Andrés Díez-Herrero, Sergio Zubelzu, and Freddy Canales-Ide. 2021. "Understanding the Mechanical Biases of Tipping-Bucket Rain Gauges: A Semi-Analytical Calibration Approach" Water 13, no. 16: 2285. https://doi.org/10.3390/w13162285
APA StyleSegovia-Cardozo, D. A., Rodríguez-Sinobas, L., Díez-Herrero, A., Zubelzu, S., & Canales-Ide, F. (2021). Understanding the Mechanical Biases of Tipping-Bucket Rain Gauges: A Semi-Analytical Calibration Approach. Water, 13(16), 2285. https://doi.org/10.3390/w13162285