
Exploring the Spatial Autocorrelation in Soil Moisture Networks: Analysis of the Bias from Upscaling the Texas Soil Observation Network (TxSON)




Abstract
:1. Introduction
2. Material and Methods
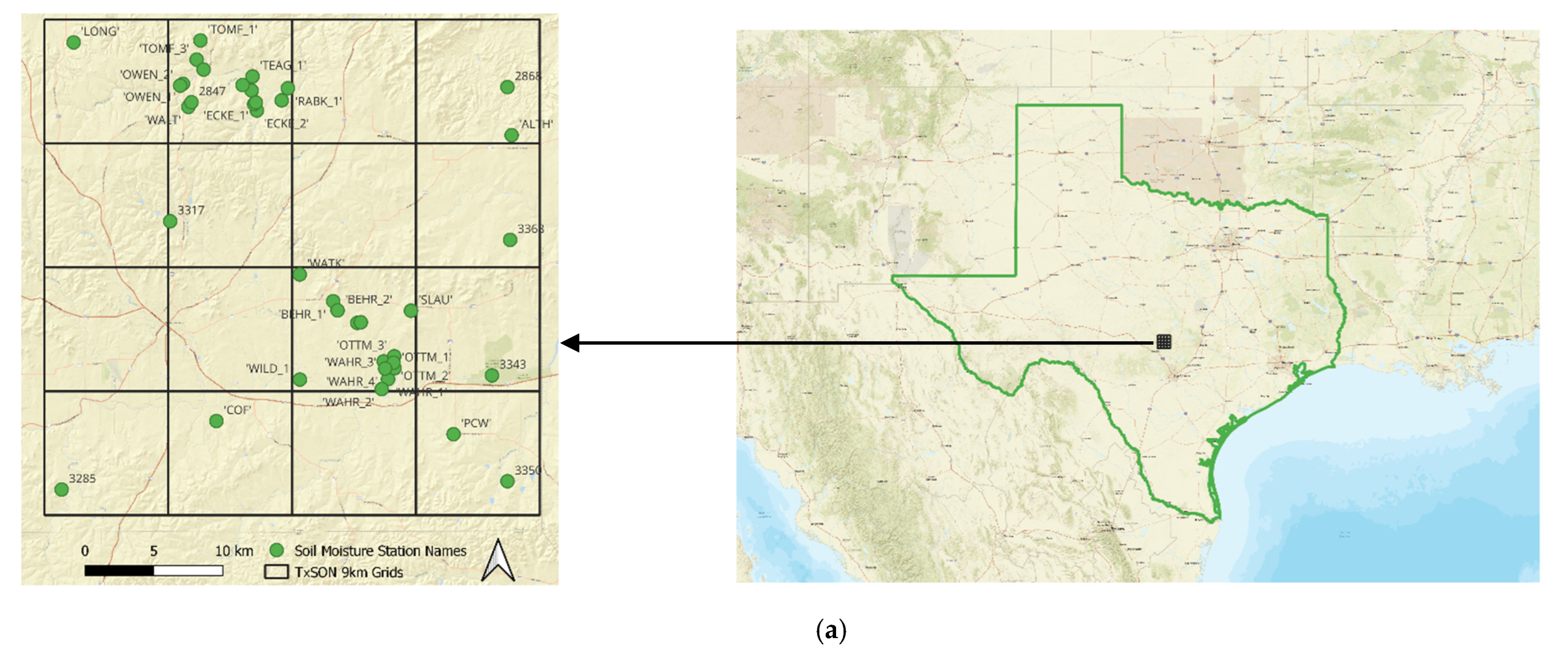
2.1. Datasets and Study Area
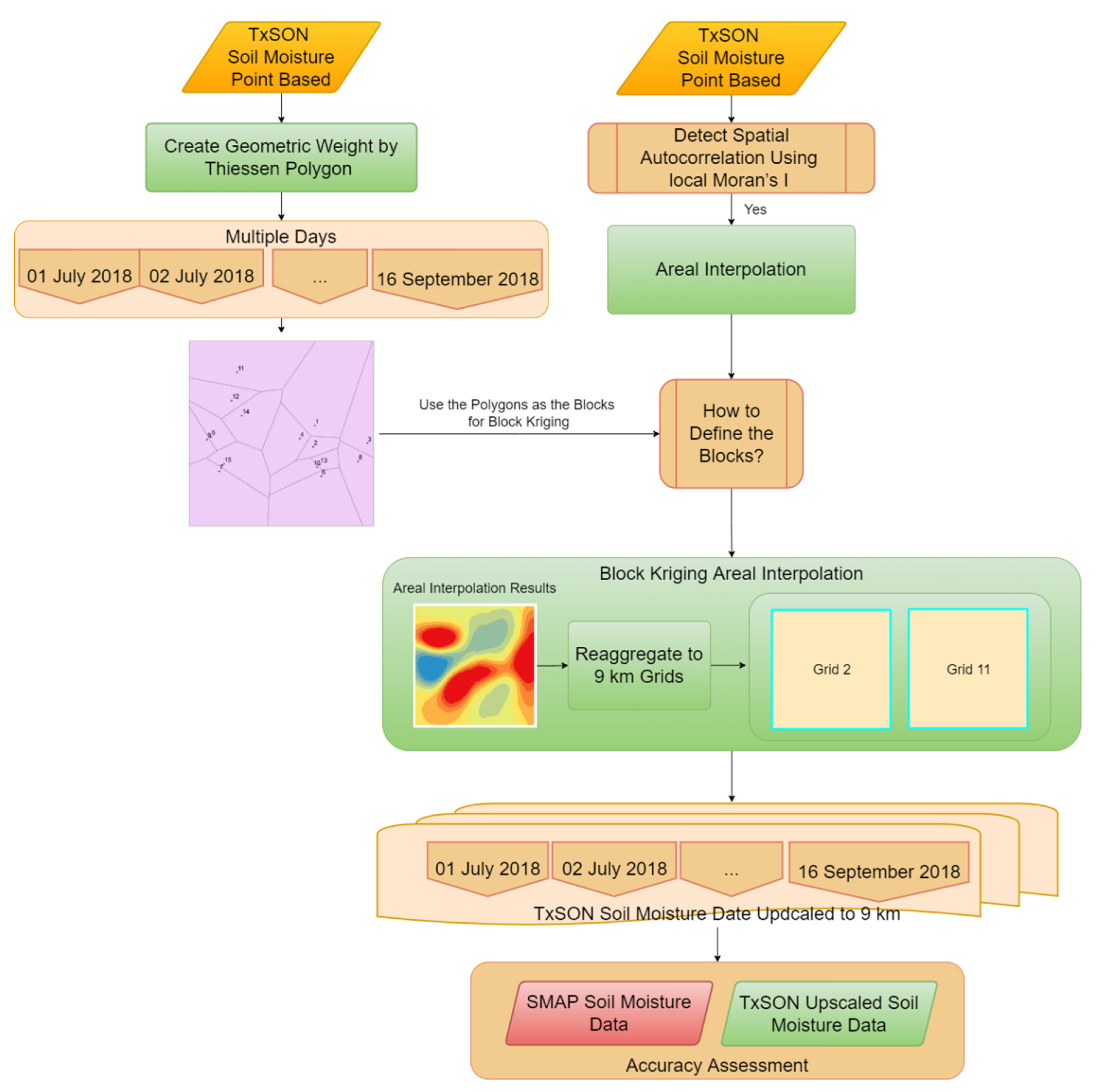
2.2. Methodology Overview
2.3. Spatial Autocorrelation Detection with Moran’s I
2.4. Soil Moisture Upscaling Common Models
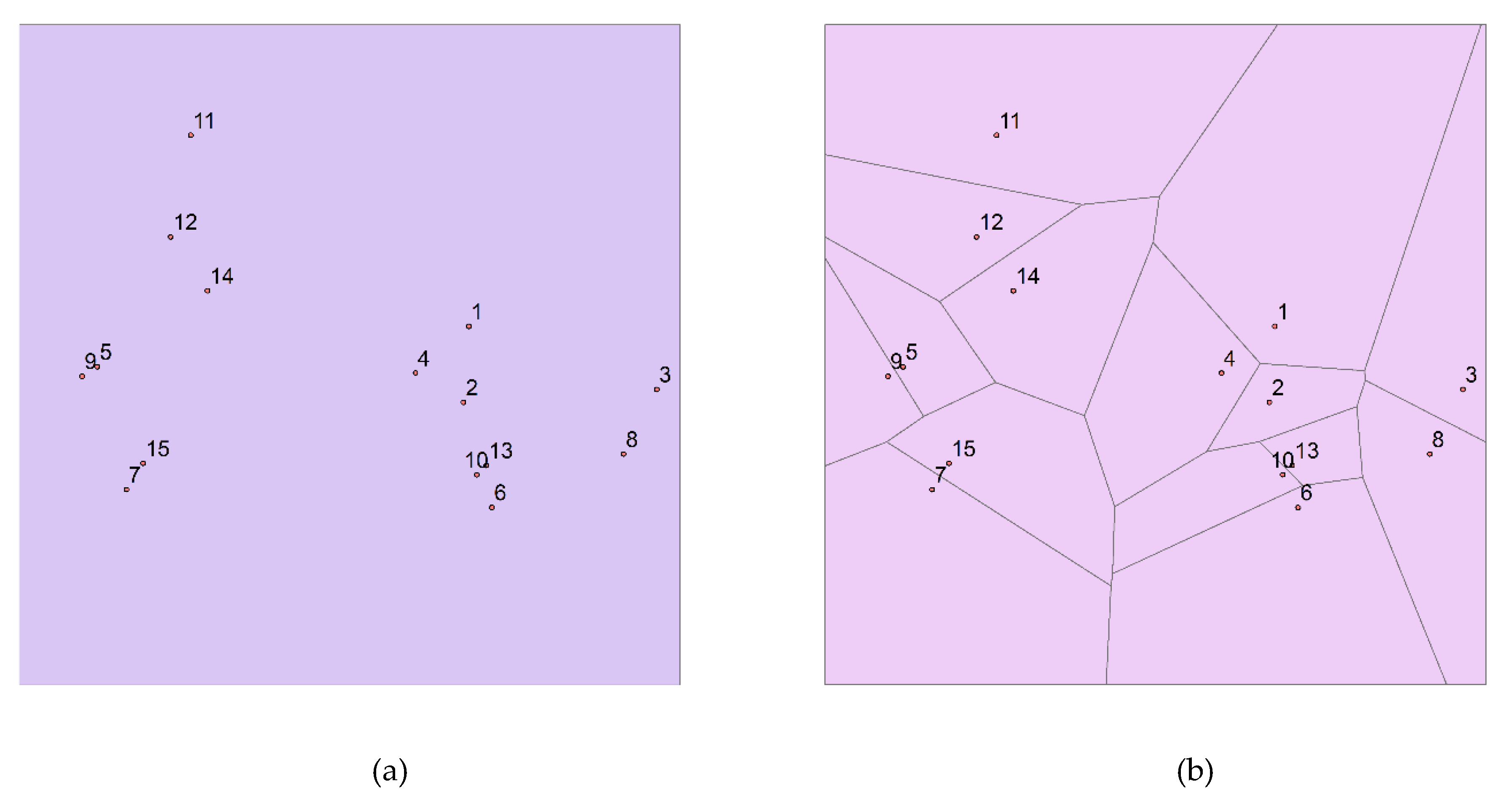
2.4.1. Thiessen Polygon
2.4.2. Arithmetic Average
2.4.3. Gaussian-Weighted Average
2.5. Our Method: Thiessen-Polygon-Based Block Kriging (TPB Kriging)
2.6. Accuracy Assessment
3. Results
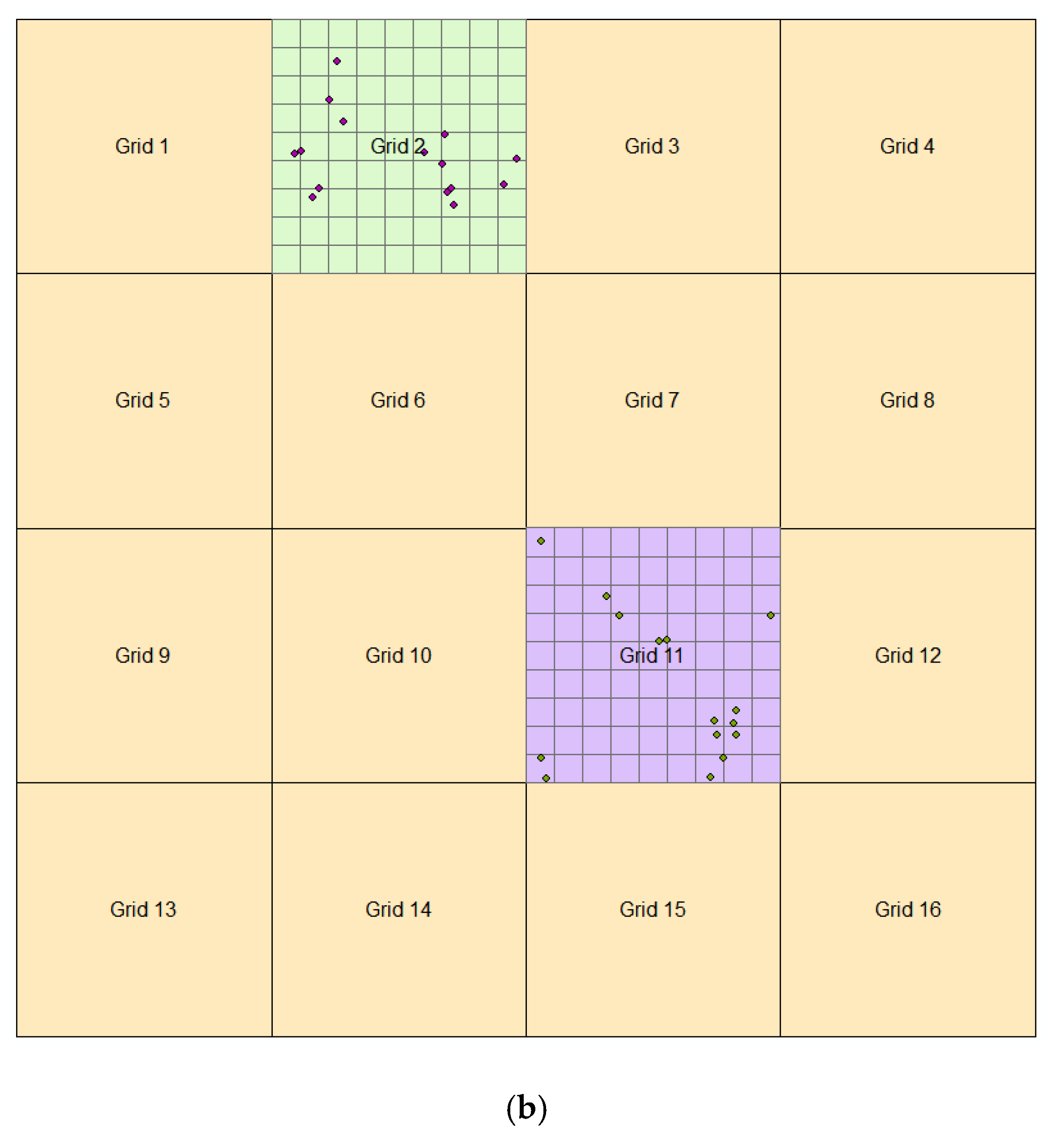
3.1. Spatial Autocorrelation Results from Moran’s I: A Tale of Two Grids
3.2. Scenario One—When Spatial Autocorrelation Is Detected in the Data
3.2.1. Daily Soil Moisture Trend from the Four Upscaling Algorithms Compared with SMAP
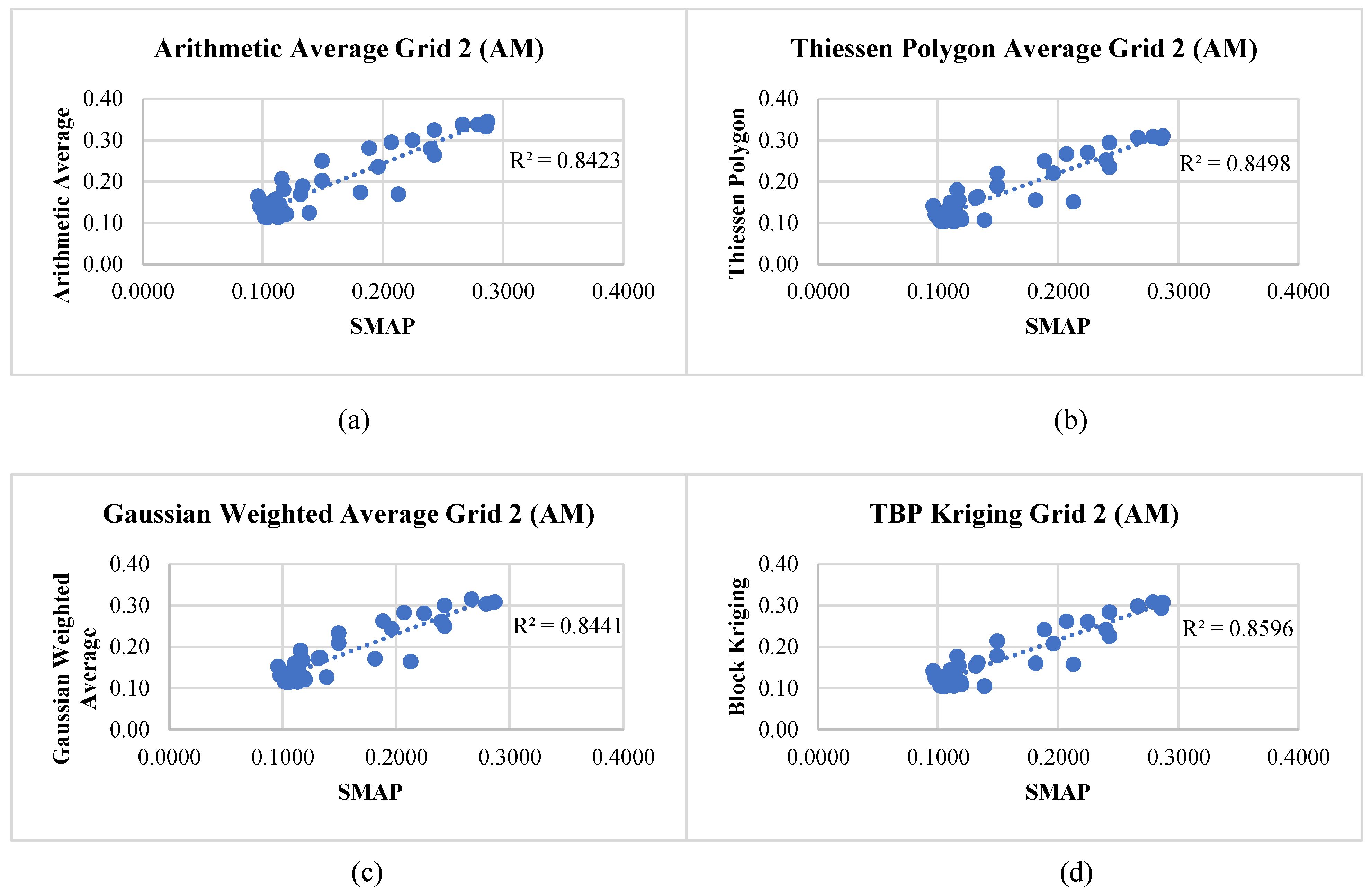
3.2.2. Evaluation of the Four Upscaling Algorithms for Grid 2
3.3. Scenario Two—When Spatial Autocorrelation Is Not Detected in the Data
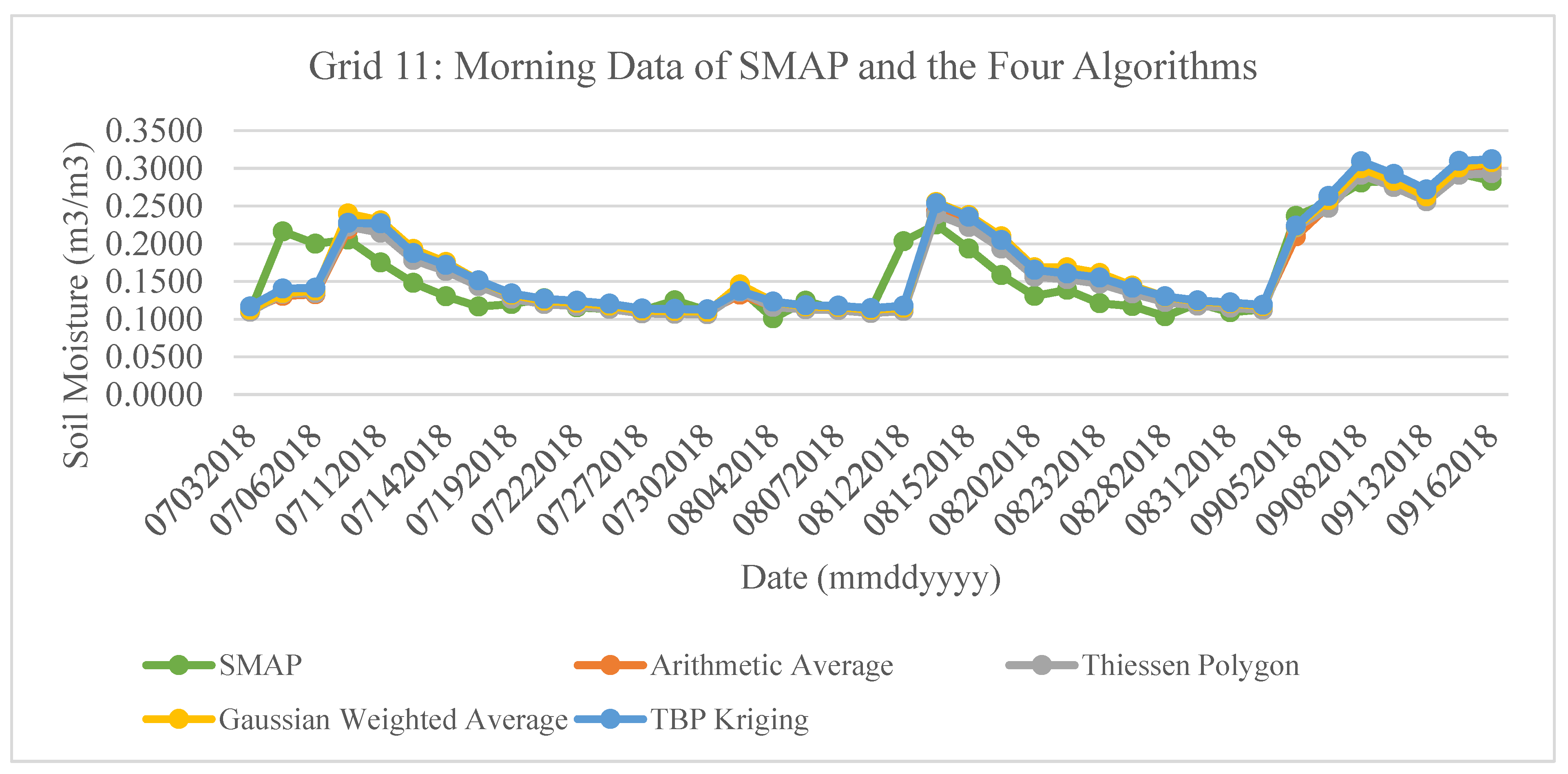
3.3.1. Daily Soil Moisture Trend from the Four Upscaling Algorithms Compared with SMAP
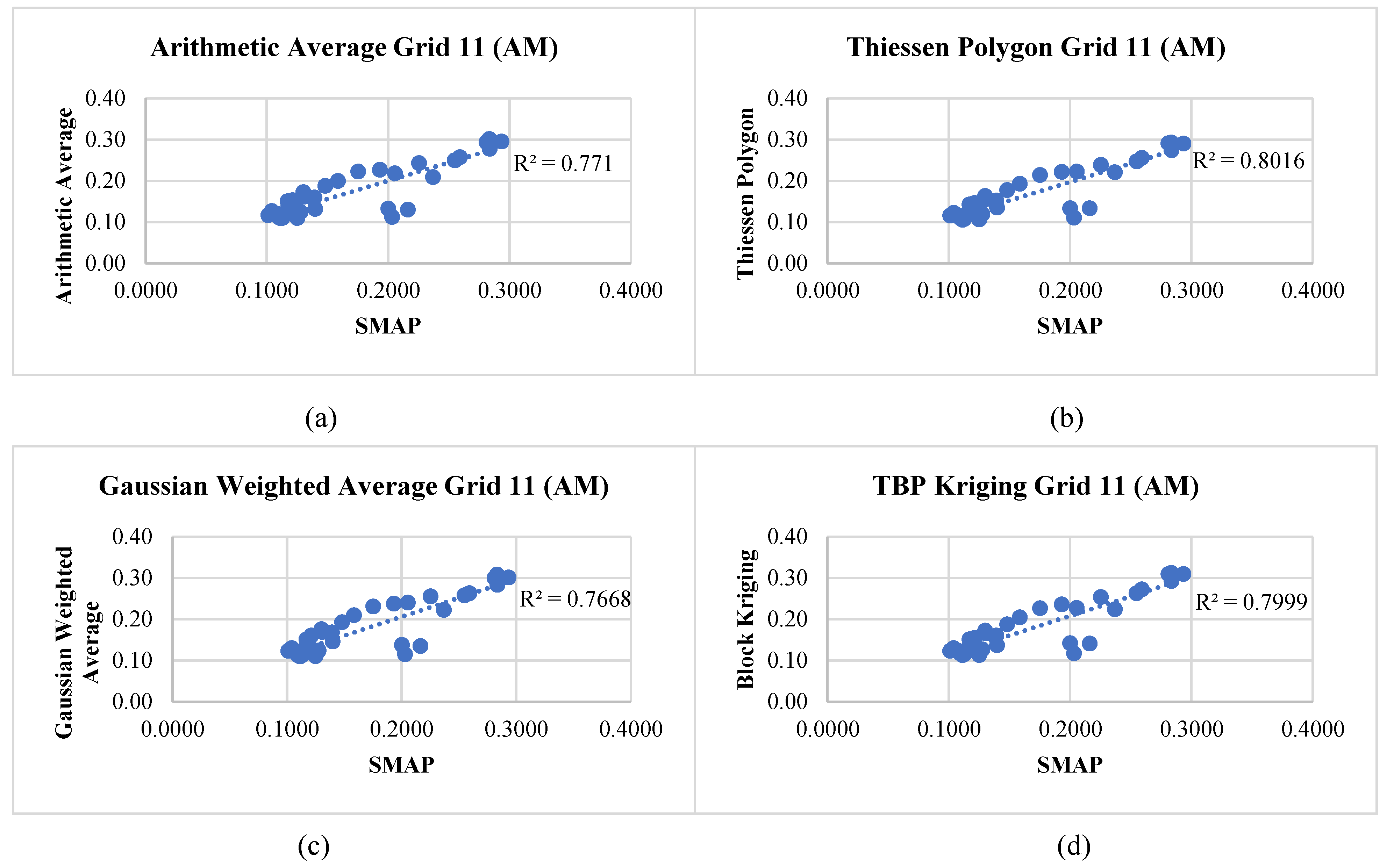
3.3.2. Evaluation of the Four Algorithms for Grid 11
4. Discussions
4.1. When Our Method Outperforms the Commonly Used Algorithms
4.2. Why Our Method Outperforms the Commonly Used Algorithms
4.3. Implications for Soil Moisture Network Optimization
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix




References
- Xu, Y.; Wang, L.; Ross, K.W.; Liu, C.; Berry, K. Standardized Soil Moisture Index for Drought Monitoring Based on Soil Moisture Active Passive Observations and 36 Years of North American Land Data Assimilation System Data: A Case Study in the Southeast United States. Remote Sens. 2018, 10, 301. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sheikh, V.; Visser, S.; Stroosnijder, L. A simple model to predict soil moisture: Bridging Event and Continuous Hydrological (BEACH) modelling. Environ. Model. Softw. 2009, 24, 542–556. [Google Scholar] [CrossRef]
- Famiglietti, J.S.; Devereaux, J.A.; Laymon, C.A.; Tsegaye, T.; Houser, P.R.; Jackson, T.J.; Graham, S.T.; Rodell, M.; van Oevelen, P.J. Ground-based investigation of soil moisture variability within remote sensing footprints During the Southern Great Plains 1997 (SGP97) Hydrology Experiment. Water Resour. Res. 1999, 35, 1839–1851. [Google Scholar] [CrossRef]
- Colliander, A.; Fisher, J.B.; Halverson, G.; Merlin, O.; Misra, S.; Bindlish, R.; Jackson, T.J.; Yueh, S. Spatial Downscaling of SMAP Soil Moisture Using MODIS Land Surface Temperature and NDVI during SMAPVEX15. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2107–2111. [Google Scholar] [CrossRef] [Green Version]
- Knipper, K.R.; Hogue, T.S.; Franz, K.J.; Scott, R.L. Downscaling SMAP and SMOS soil moisture with moderate-resolution imaging spectroradiometer visible and infrared products over southern Arizona. J. Appl. Remote Sens. 2017, 11, 026021. [Google Scholar] [CrossRef] [Green Version]
- Piles, M.; Sánchez, N.; Vall-llossera, M.; Camps, A.; Martínez-Fernández, J.; Martínez, J.; González-Gambau, V. A downscaling approach for SMOS land observations: Evaluation of high-resolution soil moisture maps over the Iberian Peninsula. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3845–3857. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Wang, L.; Ma, Z.; Li, B.; Bartels, R.; Liu, C.; Zhang, X.; Dong, J. Spatially Explicit Model for Statistical Downscaling of Satellite Passive Microwave Soil Moisture. IEEE Trans. Geosci. Remote Sens. 2020, 58, 1182–1191. [Google Scholar] [CrossRef]
- Crow, W.T.; Ryu, D.; Famiglietti, J.S. Upscaling of field-scale soil moisture measurements using distributed land surface modeling. Adv. Water Resour. 2005, 28, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Crow, W.T.; Berg, A.A.; Cosh, M.H.; Loew, A.; Mohanty, B.P.; Panciera, R.; Rosnay, P.; Ryu, D.; Walker, J.P. Upscaling sparse ground-based soil moisture observations for the validation of coarse-resolution satellite soil moisture products. Rev. Geophys. 2012, 50, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Ge, Y.; Heuvelink, G.B.M.; Zhou, C. Upscaling In Situ Soil Moisture Observations to Pixel Averages with Spatio-Temporal Geostatistics. Remote Sens. 2015, 7, 11372–11388. [Google Scholar] [CrossRef]
- Gruber, A.; De Lannoy, G.; Albergel, C.; Al-Yaari, A.; Brocca, L.; Calvet, J.C.; Colliander, A.; Cosh, M.; Crow, W.; Dorigo, W.; et al. Validation practices for satellite soil moisture retrievals: What are (the) errors? Remote Sens. Environ. 2020, 244, 111806. [Google Scholar] [CrossRef]
- Kolassa, J.; Reichle, R.H.; Liu, Q.; Alemohammad, S.H.; Gentine, P.; Aida, K.; Asanuma, J.; Bircher, S.; Caldwell, T.; Colliander, A.; et al. Estimating surface soil moisture from SMAP observations using a Neural Network technique. Remote Sens. Environ. 2018, 204, 43–59. [Google Scholar] [CrossRef] [PubMed]
- Haining, R.P. Spatial Autocorrelation. In International Encyclopedia of the Social & Behavioral Sciences; Smelser, N.J., Baltes, P.B., Eds.; Pergamon: Oxford, UK, 2001; pp. 14763–14768. [Google Scholar]
- Li, L.; Jiang, Z.; Duan, N.; Dong, W.; Hu, K.; Sun, W. Police Patrol service optimization based on the spatial pattern of hotspots. In Proceedings of the Proceedings of 2011 IEEE International Conference on Service Operations, Logistics and Informatics, Beijing, China, 10–12 July 2011; 2011; pp. 45–50. [Google Scholar]
- Goodchild, M.F. Spatial Autocorrelation; Geo Books: Norwich, UK, 1986. [Google Scholar]
- Andy, M. The ESRI Guide to GIS analysis. In Volume 2: Spatial Measurements and Statistics and Zeroing, Geographic Information Systems at Work in the Community; ESRI Press: Redlands, CA, USA, 2005. [Google Scholar]
- Anselin, L. Local indicators of spatial association—LISA. Geogr. Anal. 1995, 27, 93–115. [Google Scholar] [CrossRef]
- Griffith, D. Spatial Autocorrelation: A Primer Resource Publications in Geography; Association of American Geographers: Washington, DC, USA, 1987. [Google Scholar]
- Getis, A.; Ord, J.K. The analysis of spatial association by use of distance statistics. In Perspectives on Spatial Data Analysis; Springer: Berlin/Heidelberg, Germany, 2010; pp. 127–145. [Google Scholar]
- Vachaud, G.; Passerat de Silans, A.; Balabanis, P.; Vauclin, M. Temporal Stability of Spatially Measured Soil Water Probability Density Function 1. Soil Sci. Soc. Am. J. 1985, 49, 822–828. [Google Scholar] [CrossRef]
- Cosh, M.H.; Jackson, T.J.; Bindlish, R.; Prueger, J.H. Watershed scale temporal and spatial stability of soil moisture and its role in validating satellite estimates. Remote Sens. Environ. 2004, 92, 427–435. [Google Scholar] [CrossRef]
- Grayson, R.B.; Western, A.W.; Chiew, F.H.S.; Blöschl, G. Preferred states in spatial soil moisture patterns: Local and nonlocal controls. Water Resour. Res. 1997, 33, 2897–2908. [Google Scholar] [CrossRef]
- Mohanty, B.P.; Skaggs, T.H. Spatio-temporal evolution and time-stable characteristics of soil moisture within remote sensing footprints with varying soil, slope, and vegetation. Adv. Water Resour. 2001, 24, 1051–1067. [Google Scholar] [CrossRef]
- Brocca, L.; Morbidelli, R.; Melone, F.; Moramarco, T. Soil moisture spatial variability in experimental areas of central Italy. J. Hydrol. 2007, 333, 356–373. [Google Scholar] [CrossRef]
- Cosh, M.H.; Jackson, T.J.; Starks, P.; Heathman, G. Temporal stability of surface soil moisture in the Little Washita River watershed and its applications in satellite soil moisture product validation. J. Hydrol. 2006, 323, 168–177. [Google Scholar] [CrossRef]
- Colliander, A.; Jackson, T.; Bindlish, R.; Chan, S.; Das, N.; Kim, S.; Cosh, M.; Dunbar, R.; Dang, L.; Pashaian, L. Validation of SMAP surface soil moisture products with core validation sites. Remote Sens. Environ. 2017, 191, 215–231. [Google Scholar] [CrossRef]
- Rowlandson, T.; Impera, S.; Belanger, J.; Berg, A.A.; Toth, B.; Magagi, R. Use of in situ soil moisture network for estimating regional-scale soil moisture during high soil moisture conditions. Can. Water Resour. J./Rev. Can. Des Ressour. Hydr. 2015, 40, 343–351. [Google Scholar] [CrossRef]
- Bhuiyan, H.A.; McNairn, H.; Powers, J.; Friesen, M.; Pacheco, A.; Jackson, T.J.; Cosh, M.H.; Colliander, A.; Berg, A.; Rowlandson, T. Assessing SMAP soil moisture scaling and retrieval in the Carman (Canada) study site. Vadose Zone J. 2018, 17, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Perry, M.; Niemann, J. Generation of soil moisture patterns at the catchment scale by EOF interpolation. Hydrol. Earth Syst. Sci. Discuss. 2008, 12, 39–53. [Google Scholar] [CrossRef] [Green Version]
- Yuan, S.; Quiring, S.M. Comparison of three methods of interpolating soil moisture in Oklahoma. Int. J. Climatol. 2017, 37, 987–997. [Google Scholar] [CrossRef]
- Kang, J.; Jin, R.; Li, X. Regression kriging-based upscaling of soil moisture measurements from a wireless sensor network and multiresource remote sensing information over heterogeneous cropland. IEEE Geosci. Remote Sens. Lett. 2015, 12, 92–96. [Google Scholar] [CrossRef]
- Qin, J.; Zhao, L.; Chen, Y.; Yang, K.; Yang, Y.; Chen, Z.; Lu, H. Inter-comparison of spatial upscaling methods for evaluation of satellite-based soil moisture. J. Hydrol. 2015, 523, 170–178. [Google Scholar] [CrossRef]
- de Rosnay, P.; Drusch, M.; Boone, A.; Balsamo, G.; Decharme, B.; Harris, P.; Kerr, Y.; Pellarin, T.; Polcher, J.; Wigneron, J.-P. AMMA Land Surface Model Intercomparison Experiment coupled to the Community Microwave Emission Model: ALMIP-MEM. J. Geophys. Res. Atmos. 2009, 114, 1–18. [Google Scholar] [CrossRef]
- Clewley, D.; Whitcomb, J.B.; Akbar, R.; Silva, A.R.; Berg, A.; Adams, J.R.; Caldwell, T.; Entekhabi, D.; Moghaddam, M. A Method for Upscaling In Situ Soil Moisture Measurements to Satellite Footprint Scale Using Random Forests. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2663–2673. [Google Scholar] [CrossRef] [Green Version]
- Caldwell, T.G.; Bongiovanni, T.; Cosh, M.H.; Jackson, T.J.; Colliander, A.; Abolt, C.J.; Casteel, R.; Larson, T.; Scanlon, B.R.; Young, M.H. The Texas Soil Observation Network:A Comprehensive Soil Moisture Dataset for Remote Sensing and Land Surface Model Validation. Vadose Zone J. 2019, 18, 190034. [Google Scholar] [CrossRef]
- Chan, S.K.; Bindlish, R.; Neill, P.E.O.; Njoku, E.; Jackson, T.; Colliander, A.; Chen, F.; Burgin, M.; Dunbar, S.; Piepmeier, J.; et al. Assessment of the SMAP Passive Soil Moisture Product. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4994–5007. [Google Scholar] [CrossRef]
- Basharinov, A.Y.; Shutko, A. Simulation studies of the SHF radiation characteristics of soils under moist conditions. In Simulation Studies of the SHF Radiation Characteristics of Soils under Moist Conditions NASA Transl. into ENGLISH of “Modelnyye Issledovaniya SVCh Radiatsionnykh Kharacteristik Pochvo-Gruntov v Usloviyakh Uvlazhneniya”; (Unpublished Report); Academy of Science of the USSR, Institute of Radio Eng. and Electronics: Moscow, Russia, 1975; pp. 1–81. [Google Scholar]
- Entekhabi, D.; Yueh, S.; O’Neill, P.E.; Kellogg, K.H.; Allen, A.; Bindlish, R.; Brown, M.; Chan, S.; Colliander, A.; Crow, W.T. SMAP Handbook–Soil Moisture Active Passive: Mapping Soil Moisture and Freeze/Thaw from Space; JPL Publication: Pasadena, CA, USA, 2014. [Google Scholar]
- Chan, S.K.; Bindlish, R.; O’Neill, P.; Jackson, T.; Njoku, E.; Dunbar, S.; Chaubell, J.; Piepmeier, J.; Yueh, S.; Entekhabi, D.; et al. Development and assessment of the SMAP enhanced passive soil moisture product. Remote Sens. Environ. 2018, 204, 931–941. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hoang, K.O.; Lu, M. Assessment of the Temperature Effects in SMAP Satellite Soil Moisture Products in Oklahoma. Remote Sens. 2021, 13, 4104. [Google Scholar] [CrossRef]
- Kapilaratne, R.G.C.J.; Lu, M. Automated general temperature correction method for dielectric soil moisture sensors. J. Hydrol. 2017, 551, 203–216. [Google Scholar] [CrossRef]
- Caldwell, T.G.; Bongiovanni, T.; Cosh, M.H.; Halley, C.; Young, M.H. Field and Laboratory Evaluation of the CS655 Soil Water Content Sensor. Vadose Zone J. 2018, 17, 170214. [Google Scholar] [CrossRef] [Green Version]
- Brassel, K.E.; Reif, D. A Procedure to Generate Thiessen Polygons. Geogr. Anal. 1979, 11, 289–303. [Google Scholar] [CrossRef]
- Piepmeier, J. SMAP Calibrated, Time-Ordered Brightness Temperatures L1B_TB Data Product. 2014. Available online: https://smap.jpl.nasa.gov/system/internal_resources/details/original/278_L1B_TB_RevA_web.pdf (accessed on 23 December 2022).
- Babaud, J.; Witkin, A.P.; Baudin, M.; Duda, R.O. Uniqueness of the Gaussian kernel for scale-space filtering. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 26–33. [Google Scholar] [CrossRef]
- Trabelsi, A.; Savaria, Y. A 2D Gaussian smoothing kernel mapped to heterogeneous platforms. In Proceedings of the 2013 IEEE 11th International New Circuits and Systems Conference (NEWCAS), Paris, France, 16–19 June 2013; pp. 1–4. [Google Scholar]
- ter Haar Romeny, B.M. The gaussian kernel. In Front-End Vision and Multi-Scale Image Analysis: Multi-Scale Computer Vision Theory and Applications, Written in Mathematics; Springer: Berlin/Heidelberg, Germany, 2003; pp. 37–51. [Google Scholar]
- Burgess, T.M.; Webster, R. Optimal interpolation and isarithmic mapping of soil properties. J. Soil Sci. 1980, 31, 333–341. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J. The soil moisture active passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site Name | Soil Unit | F_loggerID | Latitude | Longitude | Land Use Type |
|---|---|---|---|---|---|
| Grid 2 | |||||
| TEAG_1 | Bastrop loamy fine sand, 1 to 5 percent slopes | ‘CR200_1′ | 30.4376 | –98.8059 | Pasture/Hay |
| TEAG_2 | Heaton loamy fine sand | ‘CR200_3′ | 30.4283 | –98.8065 | Shrub/Scrub |
| RABK_1 | Luckenbach clay loam | ‘CR200_4′ | 30.4298 | –98.7792 | Shrub/Scrub |
| TEAG_3 | Loneoak fine sand | ‘CR200_9′ | 30.4319 | –98.8133 | Shrub/Scrub |
| OWEN_1 | Luckenbach clay loam | ‘CR200_13′ | 30.4327 | –98.8583 | Shrub/Scrub |
| ECKE_2 | Heaton loamy fine sand | ‘CR200_14′ | 30.4151 | –98.8025 | Shrub/Scrub |
| WALT | Purves soils | ‘CR200_19′ | 30.4175 | –98.8542 | Shrub/Scrub |
| RABK_2 | Brackett soils | ‘CR200_21′ | 30.4218 | –98.7839 | Evergreen Forest |
| OWEN_2 | Heaton loamy fine sand | ‘CR200_22′ | 30.4315 | –98.8604 | Open Space |
| ECKE_3 | Brackett soils | ‘CR200_26′ | 30.4193 | –98.8046 | Deciduous Forest |
| TOMF_1 | Tarrant soils | ‘CR200_28′ | 30.4613 | –98.8451 | Shrub/Scrub |
| TOMF_3 | Purves soils | ‘CR200_29′ | 30.4487 | –98.8480 | Shrub/Scrub |
| ECKE_1 | Krum silty clay | ‘CR1000_1′ | 30.4205 | –98.8033 | Shrub/Scrub |
| TOMF_2 | Oakalla silty clay loam | ‘CR1000_6′ | 30.4421 | –98.8427 | Shrub/Scrub |
| 2847 | Purves | ‘LCRA_2′ | 30.4206 | –98.8519 | Open Space |
| Grid 11 | |||||
| BEHR_1 | Luckenbach clay loam | ‘CR200_2′ | 30.2897 | –98.7462 | Shrub/Scrub |
| WILD_1 | Hensley loam | ‘CR200_5′ | 30.2381 | –98.7701 | Evergreen Forest |
| WAHR_1 | Tobosa Clay | ‘CR200_6′ | 30.2383 | –98.7037 | Grassland/Herbaceous |
| WAHR_2 | Bastrop fine sandy loam | ‘CR200_7′ | 30.2318 | –98.7084 | Pasture/Hay |
| SLAU | Brackett soils | ‘CR200_8′ | 30.2834 | –98.6864 | Shrub/Scrub |
| WATK | Pedernale fine sandy loam | ‘CR200_10′ | 30.3072 | –98.7703 | Shrub/Scrub |
| WAHR_3 | Hensley loam | ‘CR200_15′ | 30.2501 | –98.7069 | Shrub/Scrub |
| BEHR_2 | Oakalla silty clay loam | ‘CR200_16′ | 30.2836 | –98.7417 | Shrub/Scrub |
| RODE_1 | Purves soils | ‘CR200_17′ | 30.2754 | –98.7268 | Shrub/Scrub |
| OTTM_1 | Brackett soils | ‘CR200_18′ | 30.2456 | –98.6988 | Shrub/Scrub |
| OTTM_3 | Hensley loam | ‘CR200_24′ | 30.2534 | –98.6990 | Shrub/Scrub |
| OTTM_2 | Bastrop loamy fine sand | ‘CR200_25′ | 30.2492 | –98.6995 | Open Space |
| WAHR_4 | Pedernale fine sandy loam | ‘CR1000_2′ | 30.2454 | –98.7059 | Shrub/Scrub |
| RODE_2 | Krum silty clay | ‘CR1000_3′ | 30.2758 | –98.7242 | Shrub/Scrub |
| Station ID | SMC at 6AM on 07012018 | Moran’s I | Z-Score | p-Value | Spatial Autocorrelation |
|---|---|---|---|---|---|
| (a) Grid 2: spatial autocorrelation detectable | |||||
| 1 | 0.0917 | −0.5107 | −1.1894 | 0.1420 | not detectable |
| 2 | 0.1606 | −0.0637 | −0.0905 | 0.4580 | not detectable |
| 3 | 0.1631 | 0.6565 | 0.9254 | 0.2860 | not detectable |
| 4 | 0.1712 | 0.1166 | 0.3375 | 0.3740 | not detectable |
| 5 | 0.1825 | −1.4172 | −1.2253 | 0.0920 | not detectable |
| 6 | 0.0676 | 0.4762 | 0.7489 | 0.2420 | not detectable |
| 7 | 0.0568 | −2.2919 | −1.7601 | 0.0020 | LH |
| 8 | 0.1678 | 0.6565 | 0.8481 | 0.2780 | not detectable |
| 9 | 0.0598 | −1.4172 | −1.1750 | 0.0600 | not detectable |
| 10 | 0.1158 | 0.1033 | 0.9660 | 0.2120 | not detectable |
| 11 | 0.0977 | −0.2507 | −0.4384 | 0.4440 | not detectable |
| 12 | 0.1493 | −0.3991 | −1.1619 | 0.1660 | not detectable |
| 13 | 0.0838 | 0.1805 | 0.4557 | 0.4000 | not detectable |
| 14 | 0.0727 | −0.4925 | −0.5078 | 0.4060 | not detectable |
| 15 | 0.2145 | −2.2919 | −1.3332 | 0.0020 | HL |
| (b) Grid 11: spatial autocorrelation not detectable | |||||
| 1 | 0.0858 | −0.2477 | −0.6361 | 0.2740 | not detectable |
| 2 | 0.0998 | −0.4157 | −1.2092 | 0.0940 | not detectable |
| 3 | 0.2094 | −0.6541 | −0.7180 | 0.2440 | not detectable |
| 4 | 0.0599 | −0.6233 | −1.4407 | 0.0960 | not detectable |
| 5 | 0.1527 | 0.1737 | 1.4382 | 0.0740 | not detectable |
| 6 | 0.0606 | 0.0152 | 0.2285 | 0.4540 | not detectable |
| 8 | 0.1423 | 0.0158 | 0.2900 | 0.3620 | not detectable |
| 9 | 0.1745 | −0.5010 | −0.9394 | 0.1780 | not detectable |
| 10 | 0.0745 | −0.0837 | −0.0615 | 0.3980 | not detectable |
| 11 | 0.0834 | −0.1007 | −0.2809 | 0.3820 | not detectable |
| 12 | 0.1442 | −0.0632 | −0.1935 | 0.4600 | not detectable |
| 13 | 0.0787 | −0.1732 | −0.5079 | 0.3340 | not detectable |
| 14 | 0.1139 | 0.0008 | 0.7361 | 0.2540 | not detectable |
| 15 | 0.1126 | 0.0094 | 0.7640 | 0.2900 | not detectable |
| Validation Matrix | TBP Kriging | Gaussian | Thiessen Polygon | Arithmetic Average | Validation Matrix | TBP Kriging | Gaussian | Thiessen Polygon | Arithmetic Average |
|---|---|---|---|---|---|---|---|---|---|
| Morning | Afternoon | ||||||||
| RMSD | 0.0298 | 0.0400 | 0.0326 | 0.0489 | RMSD | 0.0306 | 0.0419 | 0.0344 | 0.0518 |
| ubRMSD | 0.0251 | 0.0272 | 0.0275 | 0.0322 | ubRMSD | 0.0249 | 0.0262 | 0.0276 | 0.0320 |
| bias | −0.0160 | −0.0293 | −0.0176 | −0.0367 | bias | −0.0178 | −0.0326 | −0.0206 | −0.0408 |
| Validation Matrix | TBP Kriging | Gaussian | Thiessen Polygon | Arithmetic Average | Validation Matrix | TBP Kriging | Gaussian | Thiessen Polygon | Arithmetic Average |
|---|---|---|---|---|---|---|---|---|---|
| Morning | Afternoon | ||||||||
| RMSD | 0.0313 | 0.0335 | 0.0289 | 0.0314 | RMSD | 0.0304 | 0.0316 | 0.0268 | 0.0282 |
| ubRMSD | 0.0297 | 0.0322 | 0.0288 | 0.0311 | ubRMSD | 0.0269 | 0.0291 | 0.0263 | 0.0271 |
| bias | −0.0100 | −0.0093 | −0.0011 | −0.0043 | bias | −0.0141 | −0.0122 | −0.0045 | −0.0078 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Liu, C.; Wang, L.; Zou, L. Exploring the Spatial Autocorrelation in Soil Moisture Networks: Analysis of the Bias from Upscaling the Texas Soil Observation Network (TxSON). Water 2023, 15, 87. https://doi.org/10.3390/w15010087
Xu Y, Liu C, Wang L, Zou L. Exploring the Spatial Autocorrelation in Soil Moisture Networks: Analysis of the Bias from Upscaling the Texas Soil Observation Network (TxSON). Water. 2023; 15(1):87. https://doi.org/10.3390/w15010087
Chicago/Turabian StyleXu, Yaping, Cuiling Liu, Lei Wang, and Lei Zou. 2023. "Exploring the Spatial Autocorrelation in Soil Moisture Networks: Analysis of the Bias from Upscaling the Texas Soil Observation Network (TxSON)" Water 15, no. 1: 87. https://doi.org/10.3390/w15010087
APA StyleXu, Y., Liu, C., Wang, L., & Zou, L. (2023). Exploring the Spatial Autocorrelation in Soil Moisture Networks: Analysis of the Bias from Upscaling the Texas Soil Observation Network (TxSON). Water, 15(1), 87. https://doi.org/10.3390/w15010087