Nonlocal Mechanical Behavior of Layered Nanobeams




Abstract
:1. Introduction
2. Fundamental Concepts
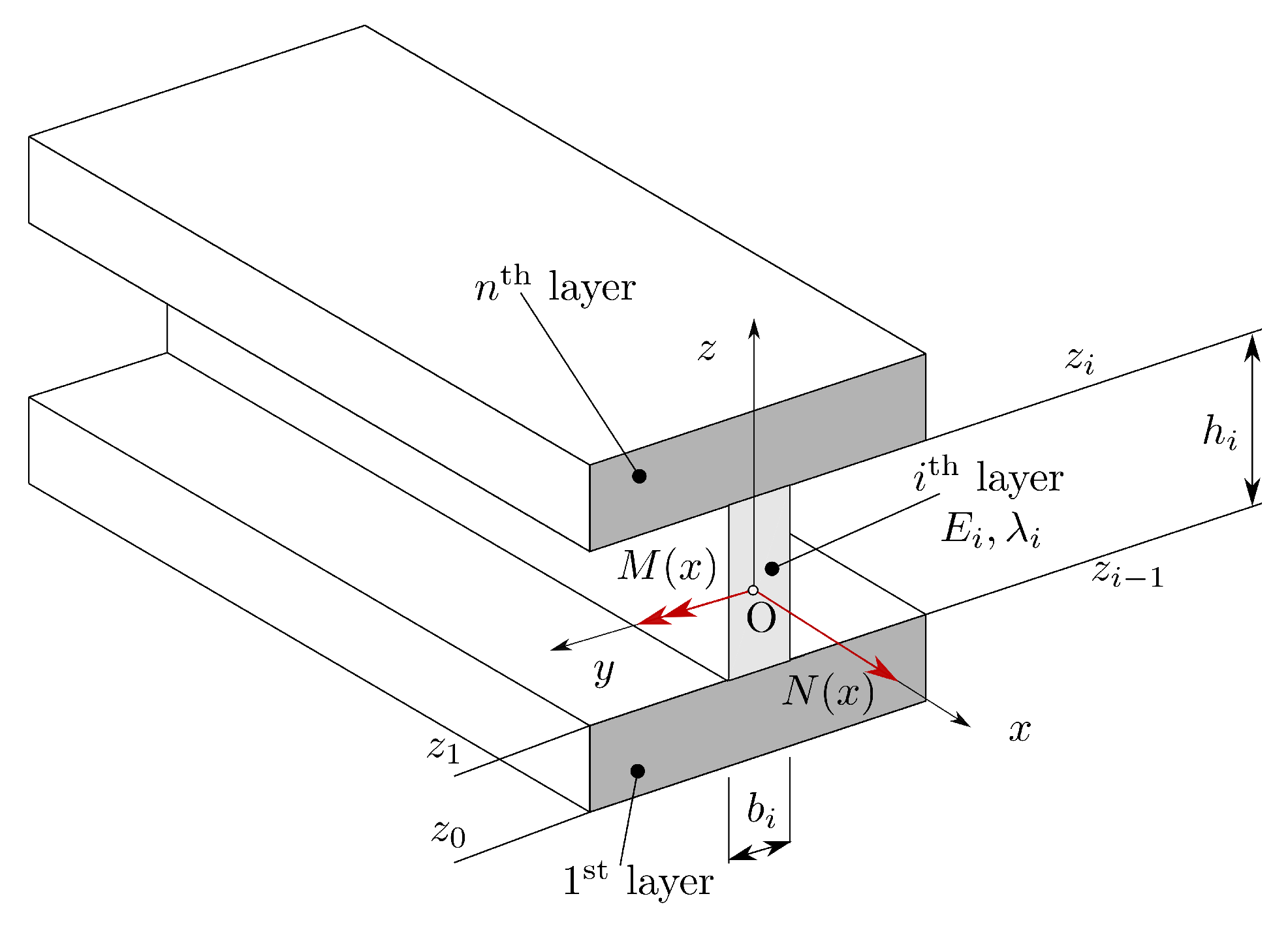
2.1. Geometry of the Beam
2.2. Notation
2.3. Kinematics of the Beam
3. Nonlocal Material Model
4. A Nonlocal Variational Setting for Beams
4.1. Stationarity with Respect to Axial Displacement
4.2. Stationarity with Respect to Transverse Displacement
4.3. Neutral Surface Position
- all small-size parameters are equal, , ; or
- symmetry about the plane in all material properties (Young’s modulus and small-size parameter) and geometry (width and height) of each layer exists.
5. Examples
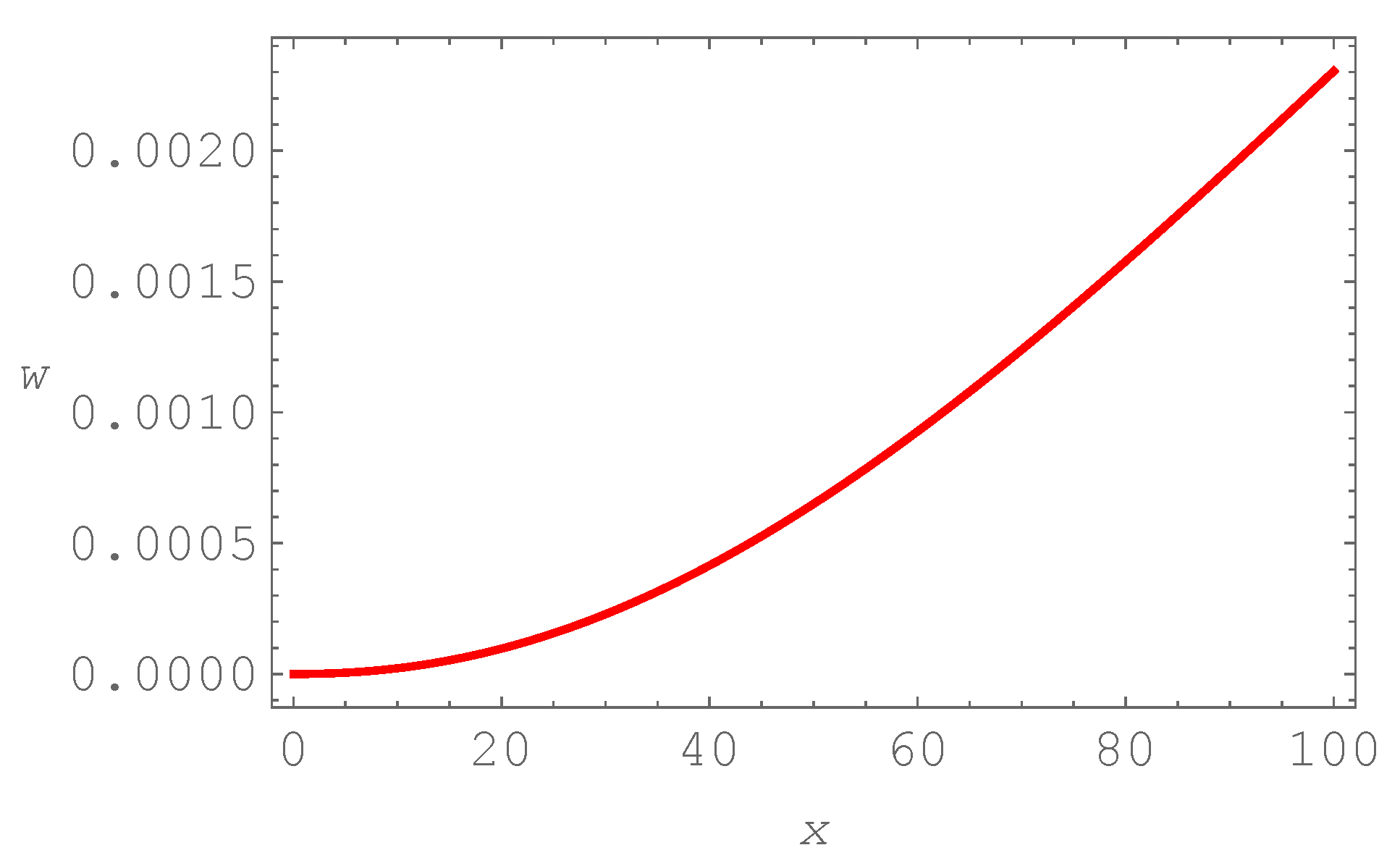
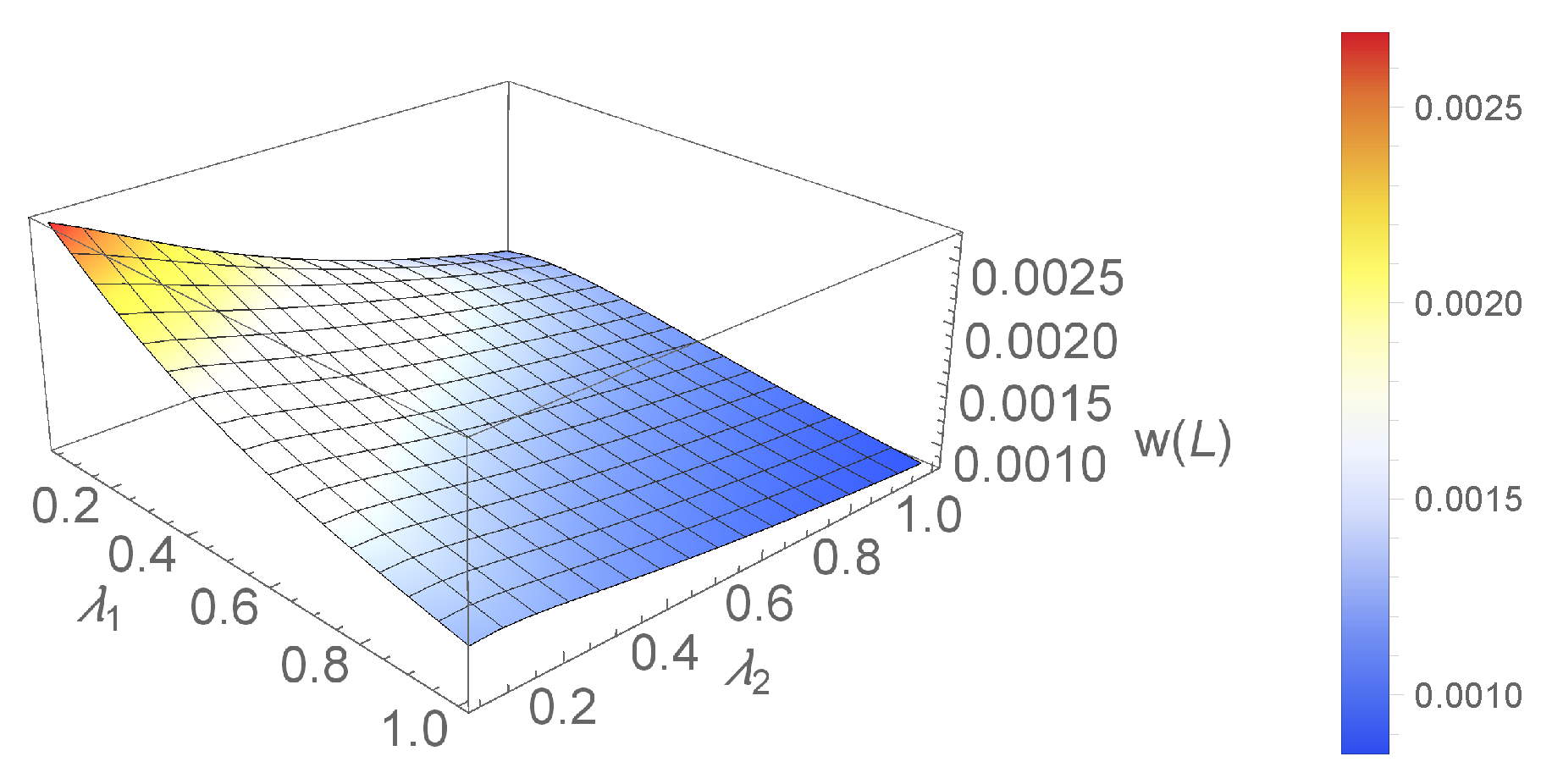
5.1. Cantilever Beam
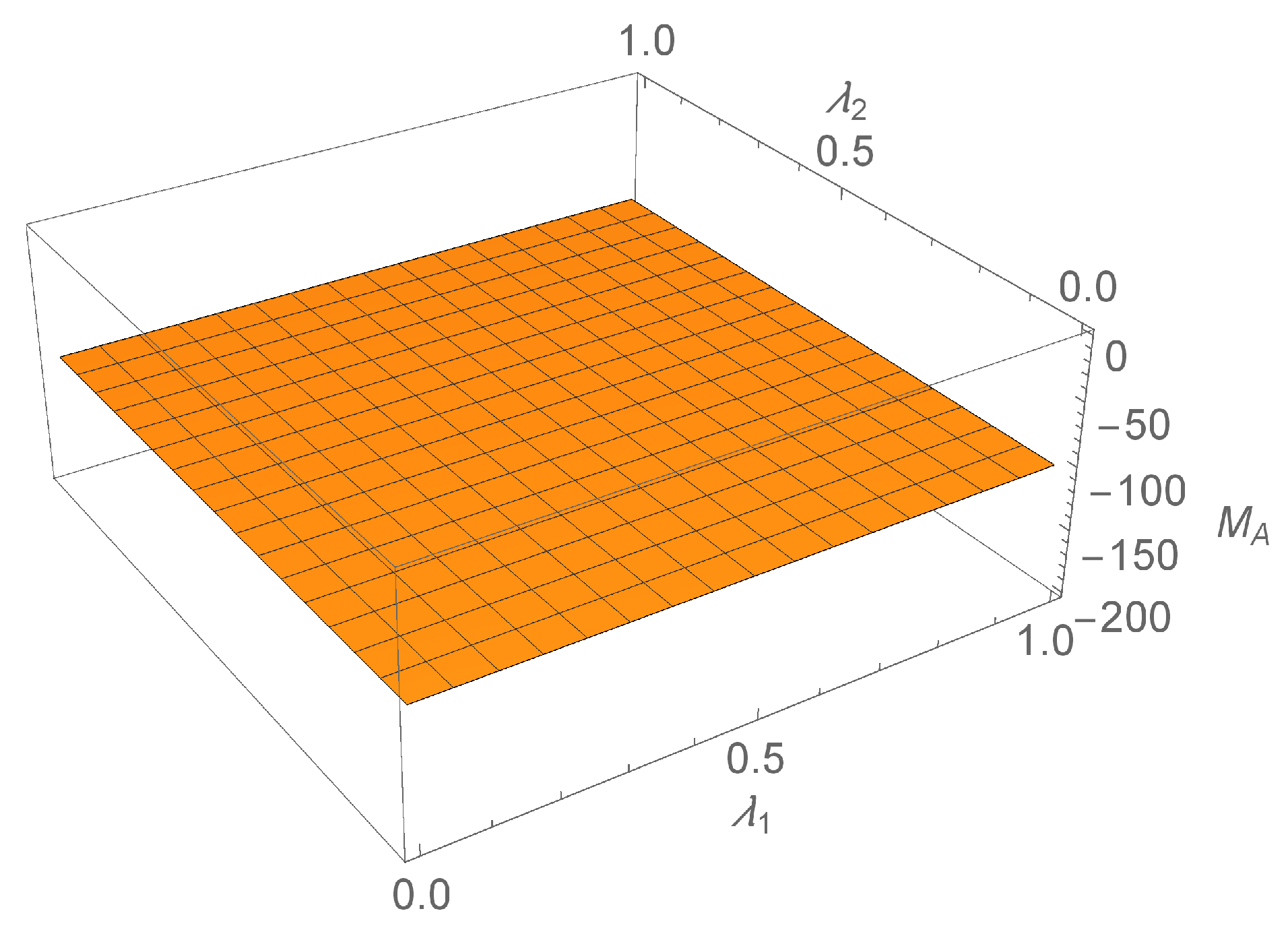
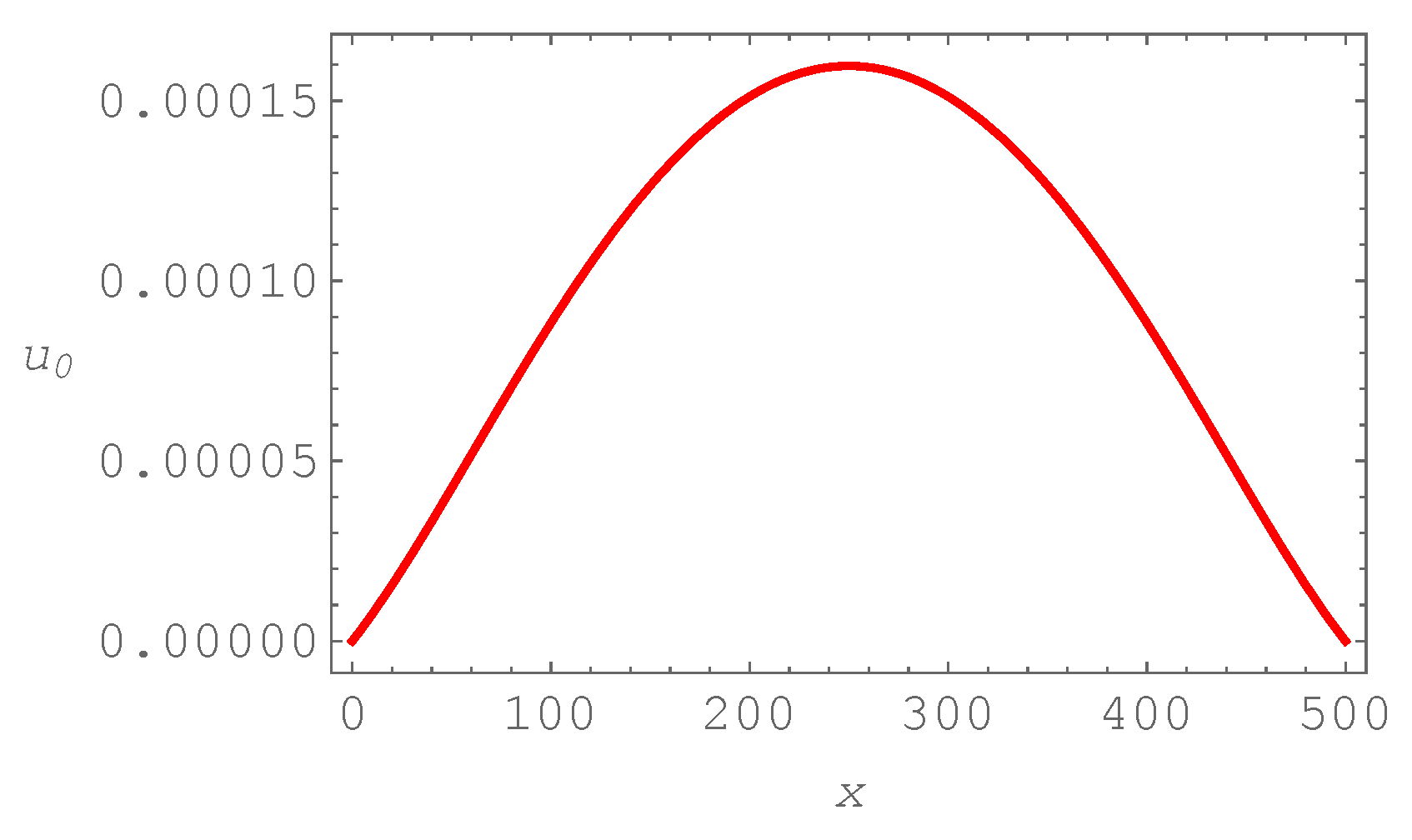
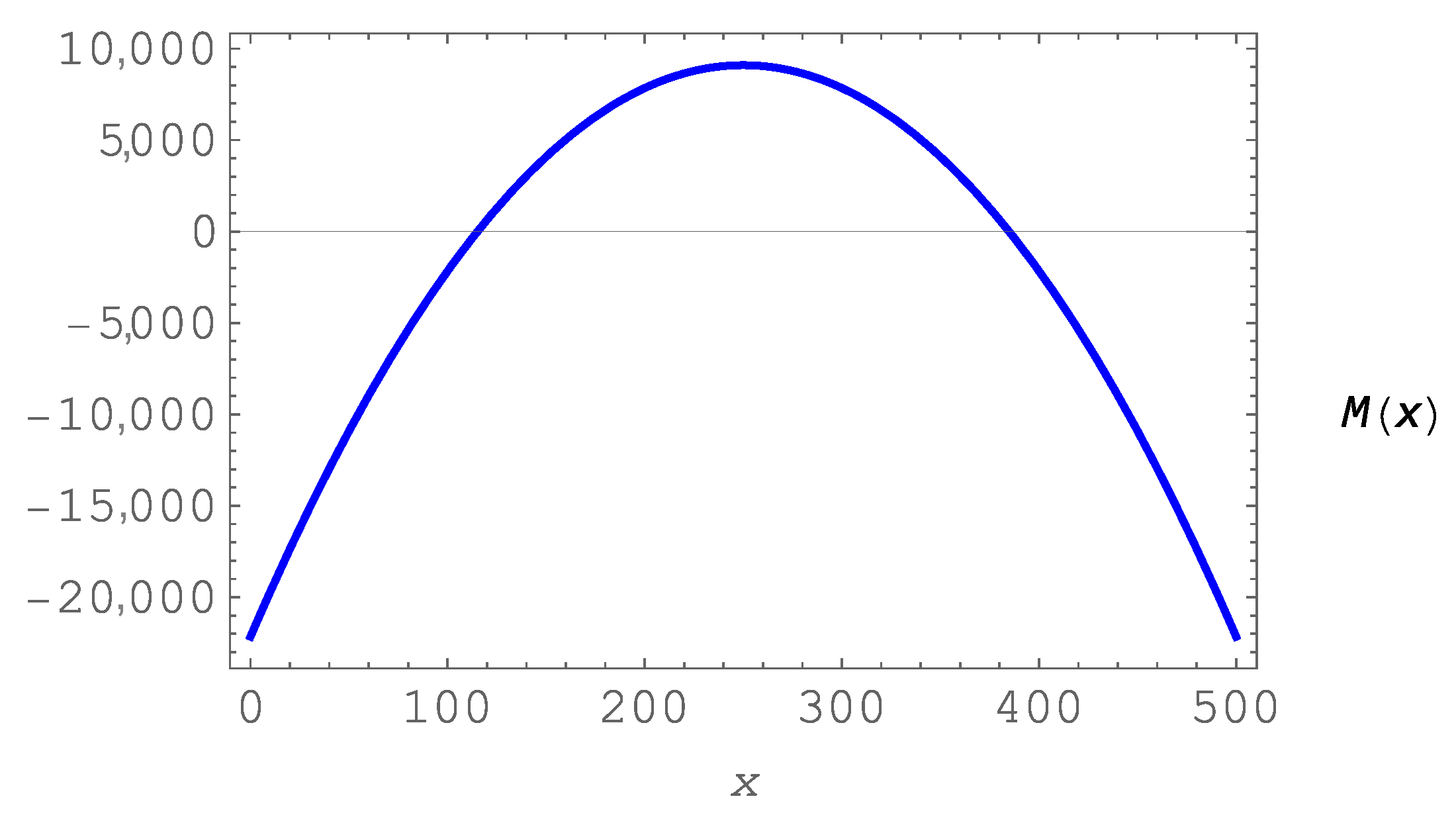
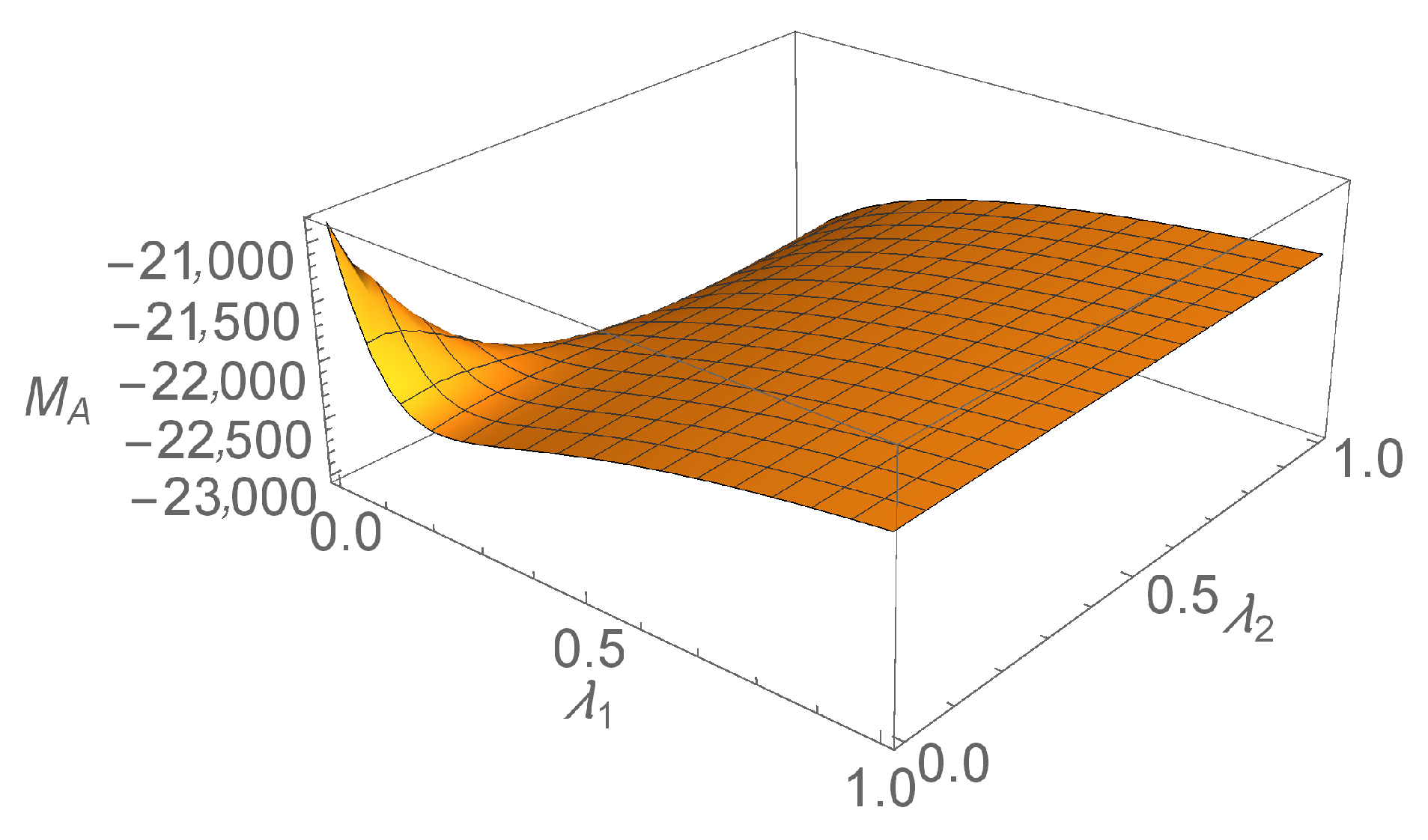
5.2. Doubly Clamped Beam
6. Conclusions
- The stress-driven integral approach based on Bernoulli–Euler kinematical hypotheses is extended to composite beams assembled of multiple layers, not necessarily of equal width. As demonstrated in the examples, the approach does not suffer from paradoxes present in some other formulations.
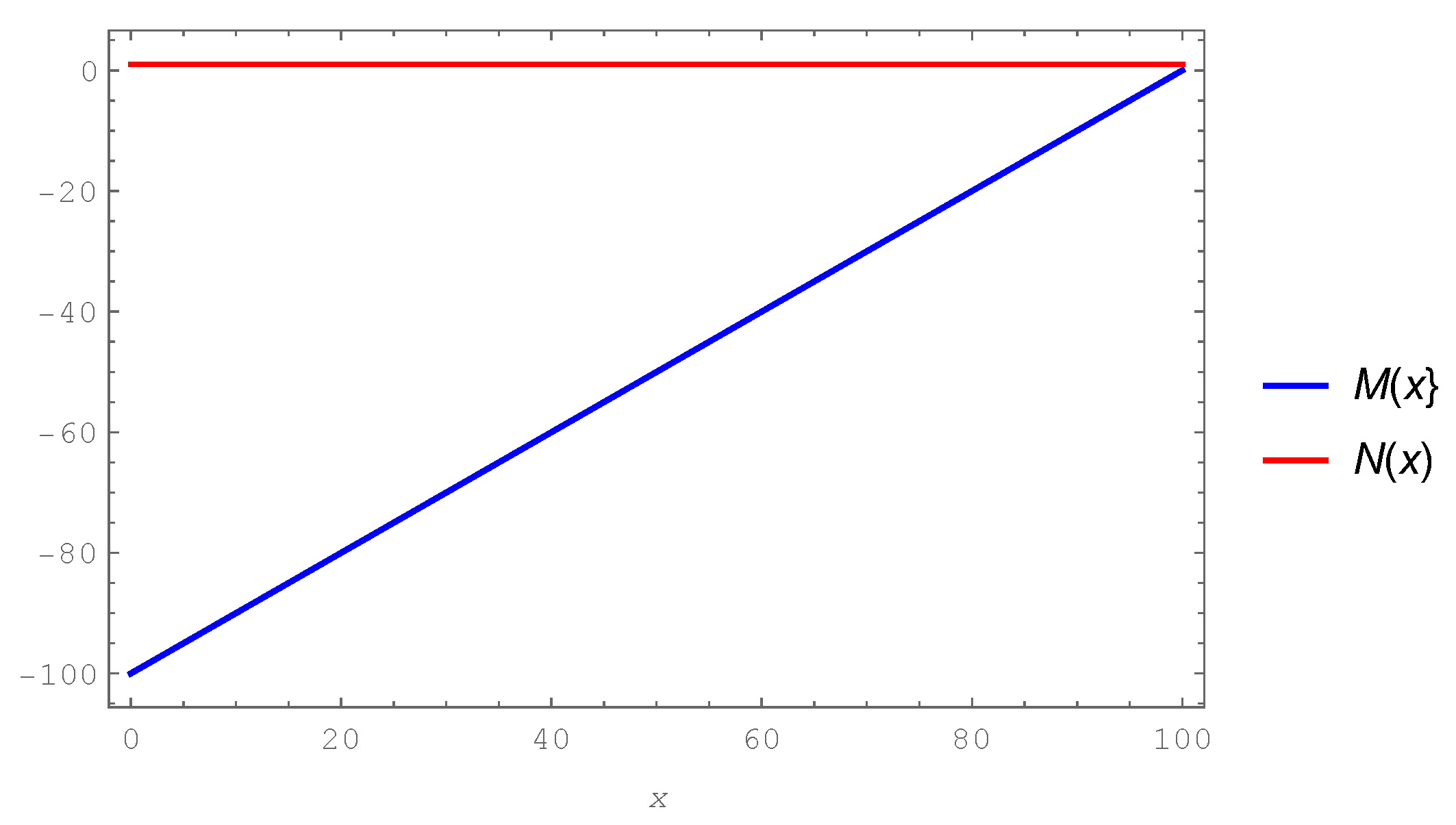
- The more standard approach that includes mixed boundary conditions, i.e., both stress resultants and prescribed displacements, is replaced by the purely kinematical framework. In this way, it is not necessary to explicitly determine support reactions in order to calculate displacements. Support reactions and stress resultant distributions are conveniently calculated in the post-processing phase.
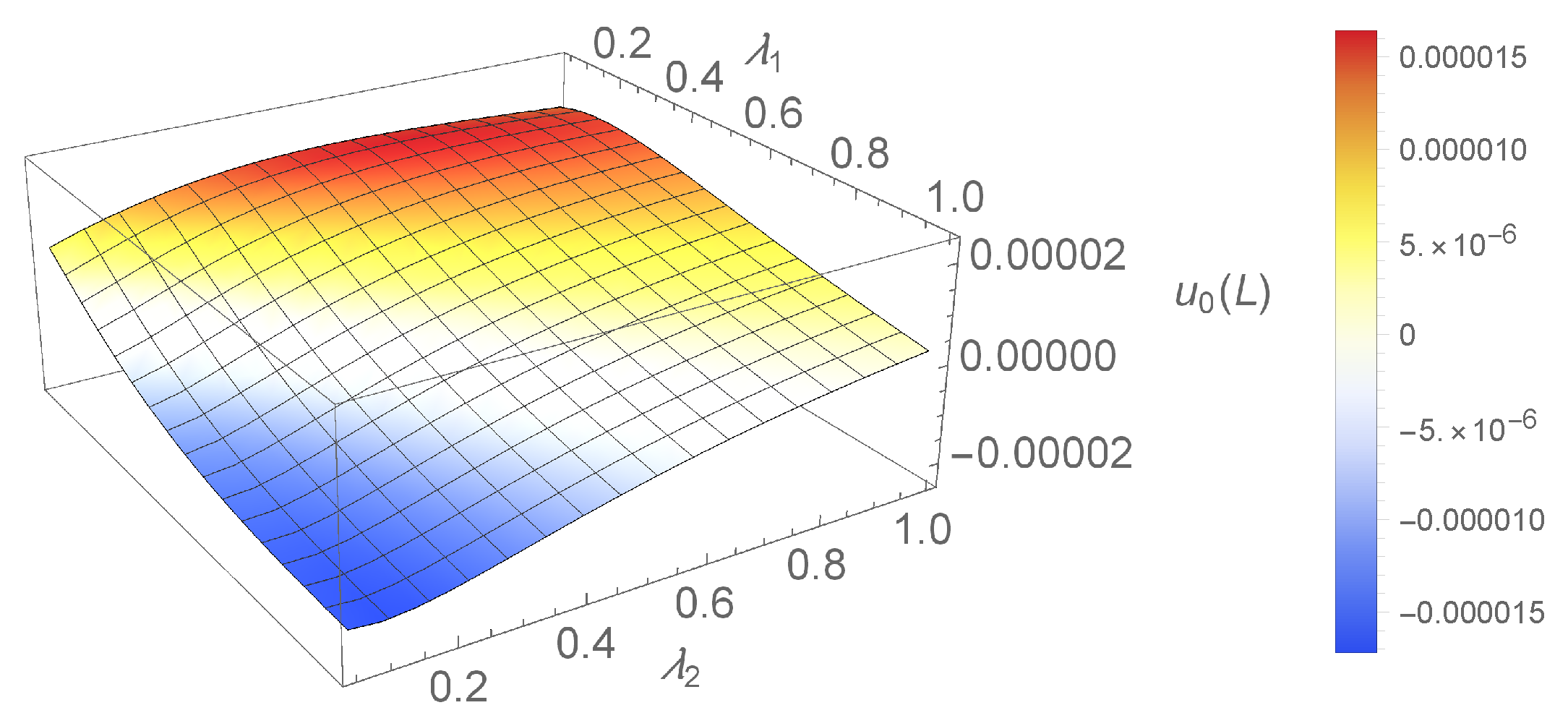
- The example section demonstrates that in statically undetermined structural problems, reaction systems exhibit technically significant size effects which therefore have to be taken in due account in design and optimization of a wide variety of new-generation sensors and actuators.
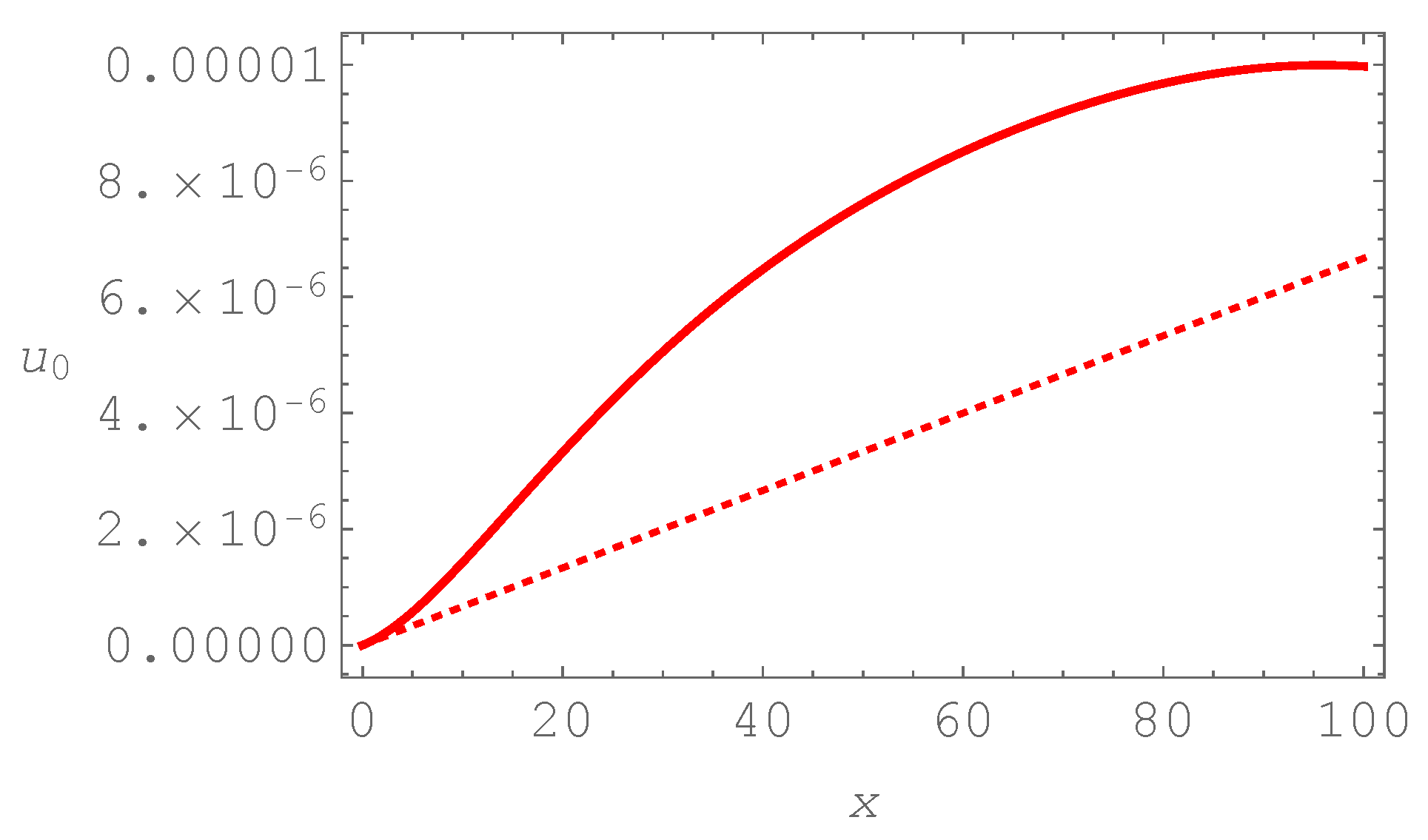
- In the general case of layered beams, the resulting formulation exhibits coupling between axial and transverse displacements. This gives rise to unusual nonlocal phenomena, such as shortening of the nanobeam in the presence of tensile axial force. Coupling of axial and bending terms in the governing differential equations, as well as the neutral surface shift, give rise to such effects.
- Finally, as discussed in the Introduction, if the beams with larger length/thickness ratios are to be considered, one must be wary about the surface and interface effects. An extension with a specialized size-dependent model is recommended in such cases.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Farajpour, A.; Ghayesh, M.H.; Farokhi, H. A review on the mechanics of nanostructures. Int. J. Eng. Sci. 2018, 133, 231–263. [Google Scholar] [CrossRef]
- Pourasghar, A.; Chen, Z. Effect of hyperbolic heat conduction on the linear and nonlinear vibration of CNT reinforced size-dependent functionally graded microbeams. Int. J. Eng. Sci. 2019, 137, 57–72. [Google Scholar] [CrossRef]
- Xia, X.; Weng, G.J.; Hou, D.; Wen, W. Tailoring the frequency-dependent electrical conductivity and dielectric permittivity of CNT-polymer nanocomposites with nanosized particles. Int. J. Eng. Sci. 2019, 142, 1–19. [Google Scholar] [CrossRef]
- Mojahedi, M. Size dependent dynamic behavior of electrostatically actuated microbridges. Int. J. Eng. Sci. 2017, 111, 74–85. [Google Scholar] [CrossRef]
- Moradweysi, P.; Ansari, R.; Hosseini, K.; Sadeghi, F. Application of modified Adomian decomposition method to pull-in instability of nano-switches using nonlocal Timoshenko beam theory. Appl. Math. Model. 2018, 54, 594–604. [Google Scholar] [CrossRef]
- Hosseini, S.M. Analytical solution for nonlocal coupled thermoelasticity analysis in a heat-affected MEMS/NEMS beam resonator based on Green–Naghdi theory. Appl. Math. Model. 2018, 57, 21–36. [Google Scholar] [CrossRef]
- Tran, N.; Ghayesh, M.H.; Arjomandi, M. Ambient vibration energy harvesters: A review on nonlinear techniques for performance enhancement. Int. J. Eng. Sci. 2018, 127, 162–185. [Google Scholar] [CrossRef]
- Basutkar, R. Analytical modelling of a nanoscale series-connected bimorph piezoelectric energy harvester incorporating the flexoelectric effect. Int. J. Eng. Sci. 2019, 139, 42–61. [Google Scholar] [CrossRef]
- Ghayesh, M.H.; Farokhi, H. Nonlinear broadband performance of energy harvesters. Int. J. Eng. Sci. 2020, 147, 103202. [Google Scholar] [CrossRef]
- Sadeghian, H.; Yang, C.K.; Goosen, J.F.L.; van der Drift, E.; Bossche, A.; French, P.J.; van Keulen, F. Characterizing size-dependent effective elastic modulus of silicon nanocantilevers using electrostatic pull-in instability. Appl. Phys. Lett. 2009, 94, 221903. [Google Scholar] [CrossRef]
- Poelma, R.; Sadeghian, H.; Noijen, S.; Zaal, J.; Zhang, G. Multi-scale numerical-experimental method to determine the size dependent elastic properties of bilayer silicon copper nanocantilevers using an electrostatic pull in experiment. In Proceedings of the 2010 11th International Thermal, Mechanical & Multi-Physics Simulation, and Experiments in Microelectronics and Microsystems (EuroSimE), Bordeaux, France, 26–28 April 2010. [Google Scholar] [CrossRef]
- Sadeghian, H.; Goosen, H.; Bossche, A.; Thijsse, B.; Van Keulen, F. On the size-dependent elasticity of silicon nanocantilevers: Impact of defects. J. Phys. Appl. Phys. 2011, 44. [Google Scholar] [CrossRef] [Green Version]
- Li, C.; Chou, T.W. A structural mechanics approach for the analysis of carbon nanotubes. Int. J. Solids Struct. 2003, 40, 2487–2499. [Google Scholar] [CrossRef]
- Li, C.; Chou, T. Elastic moduli of multi-walled Carbon nanotubes and the effect of van der Waals forces. Compos. Sci. Technol. 2003, 63, 1517–1524. [Google Scholar] [CrossRef]
- Barretta, R.; Brcic, M.; Canadija, M.; Luciano, R.; de Sciarra, F.M. Application of gradient elasticity to armchair carbon nanotubes: Size effects and constitutive parameters assessment. Eur. J. Mech. A Solids 2017, 65, 1–13. [Google Scholar] [CrossRef]
- Preethi, K.; Raghu, P.; Rajagopal, A.; Reddy, J. Nonlocal nonlinear bending and free vibration analysis of a rotating laminated nano cantilever beam. Mech. Adv. Mater. Struct. 2018, 25, 439–450. [Google Scholar] [CrossRef]
- Arefi, M.; Zenkour, A. Size-dependent vibration and bending analyses of the piezomagnetic three-layer nanobeams. Appl. Phys. Mater. Sci. Process. 2017, 123. [Google Scholar] [CrossRef]
- Arefi, M.; Zenkour, A. Influence of magneto-electric environments on size-dependent bending results of three-layer piezomagnetic curved nanobeam based on sinusoidal shear deformation theory. J. Sandw. Struct. Mater. 2019, 21, 2751–2778. [Google Scholar] [CrossRef]
- Wang, Q.; Mao, D.; Zhu, J.; Dong, L. NEMS-based asymmetric split ring resonators for thermomechanically tunable infrared metamaterials. In Proceedings of the 2017 IEEE 17th International Conference on Nanotechnology (IEEE-NANO), Pittsburgh, PA, USA, 25–28 July 2017; pp. 834–837. [Google Scholar] [CrossRef]
- Feng, L.; Gao, F.; Liu, M.; Wang, S.; Li, L.; Shen, M.; Wang, Z. Investigation of the mechanical bending and frequency shift induced by adsorption and temperature using micro- and nanocantilever sensors. J. Appl. Phys. 2012, 112, 013501. [Google Scholar] [CrossRef]
- Xu, M.; Wang, B.; Yu, A. Effects of surface energy on the nonlinear behaviors of laminated nanobeams. Int. J. Precis. Eng. Manuf. Green Technol. 2017, 4, 105–111. [Google Scholar] [CrossRef]
- Müller, P.; Saúl, A. Elastic effects on surface physics. Surf. Sci. Rep. 2004, 54, 157–258. [Google Scholar] [CrossRef]
- Miller, R.E.; Shenoy, V.B. Size-dependent elastic properties of nanosized structural elements. Nanotechnology 2000, 11, 139. [Google Scholar] [CrossRef]
- Rongong, J.; Goruppa, A.; Buravalla, V.; Tomlinson, G.; Jones, F. Plasma deposition of constrained layer damping coatings. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2004, 218, 669–680. [Google Scholar] [CrossRef] [Green Version]
- Catania, G.; Strozzi, M. Damping oriented design of thin-walled mechanical components by means of multi-layer coating technology. Coatings 2018, 8, 73. [Google Scholar] [CrossRef] [Green Version]
- Yu, L.; Ma, Y.; Zhou, C.; Xu, H. Damping efficiency of the coating structure. Int. J. Solids Struct. 2005, 42, 3045–3058. [Google Scholar] [CrossRef]
- Eringen, A. On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J. Appl. Phys. 1983, 54, 4703–4710. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R.; Diaco, M.; Marotti de Sciarra, F. Constitutive boundary conditions and paradoxes in nonlocal elastic nanobeams. Int. J. Mech. Sci. 2017, 121, 151–156. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R. Stress-driven versus strain-driven nonlocal integral model for elastic nano-beams. Compos. Part Eng. 2017, 114, 184–188. [Google Scholar] [CrossRef]
- Challamel, N.; Wang, C. The small length scale effect for a non-local cantilever beam: A paradox solved. Nanotechnology 2008, 19, 345703. [Google Scholar] [CrossRef]
- Peddieson, J.; Buchanan, G.R.; McNitt, R.P. Application of nonlocal continuum models to nanotechnology. Int. J. Eng. Sci. 2003, 41, 305–312. [Google Scholar] [CrossRef]
- Romano, G.; Barretta, R. Nonlocal elasticity in nanobeams: The stress-driven integral model. Int. J. Eng. Sci. 2017, 115, 14–27. [Google Scholar] [CrossRef]
- Uvarov, I.; Naumov, V.; Amirov, I. Resonance properties of multilayer metallic nanocantilevers. In Proceedings of the International Conference Micro-and Nano-Electronics 2012, Zvenigorod, Russia, 1–5 October 2012; Volume 8700. [Google Scholar] [CrossRef]
- Barretta, R.; Čanađija, M.; de Sciarra, F.M. Nonlocal integral thermoelasticity: A thermodynamic framework for functionally graded beams. Compos. Struct. 2019, 225, 111104. [Google Scholar] [CrossRef] [Green Version]
- Dehrouyeh-Semnani, A.M. On boundary conditions for thermally loaded FG beams. Int. J. Eng. Sci. 2017, 119, 109–127. [Google Scholar] [CrossRef]
- Larbi, L.O.; Kaci, A.; Houari, M.S.A.; Tounsi, A. An efficient shear deformation beam theory based on neutral surface position for bending and free vibration of functionally graded beams. Mech. Based Des. Struct. Mach. 2013, 41, 421–433. [Google Scholar] [CrossRef]
- Abu Al-Rub, R.; Voyiadjis, G. Analytical and experimental determination of the material intrinsic length scale of strain gradient plasticity theory from micro- and nano-indentation experiments. Int. J. Plast. 2004, 20, 1139–1182. [Google Scholar] [CrossRef]
- Perkins, R.W., Jr.; Thompson, D. Experimental evidence of a couple-stress effect. AIAA J. 1973, 11, 1053–1055. [Google Scholar] [CrossRef]
- Kakunai, S.; Masaki, J.; Kuroda, R.; Iwata, K.; Nagata, R. Measurement of apparent Young’s modulus in the bending of cantilever beam by heterodyne holographic interferometry. Exp. Mech. 1985, 25, 408–412. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, C.; Tan, V. Assessment of Timoshenko beam models for vibrational behavior of single-walled carbon nanotubes using molecular dynamics. Adv. Appl. Math. Mech. 2009, 1, 89–106. [Google Scholar]
- Arash, B.; Ansari, R. Evaluation of nonlocal parameter in the vibrations of single-walled carbon nanotubes with initial strain. Physica E 2010, 42, 2058–2064. [Google Scholar] [CrossRef]
- Narendar, S.; Gopalakrishnan, S. Critical buckling temperature of single-walled carbon nanotubes embedded in a one-parameter elastic medium based on nonlocal continuum mechanics. Physica E 2011, 43, 1185–1191. [Google Scholar] [CrossRef]
- Duan, W.; Wang, C.; Zhang, Y. Calibration of nonlocal scaling effect parameter for free vibration of carbon nanotubes by molecular dynamics. J. Appl. Phys. 2007, 101, 024305. [Google Scholar] [CrossRef]
- Xiao, S.; Hou, W. Studies of size effects on carbon nanotubes’ mechanical properties by using different potential functions. Fuller. Nanotub. Carbon Nanostruct. 2006, 14, 9–16. [Google Scholar] [CrossRef]
- Polyanin, A.D.; Manzhirov, A.V. Handbook of Integral Equations; CRC: Boca Raton, FL, USA, 1998. [Google Scholar]
- Barretta, R.; Čanađija, M.; Luciano, R.; de Sciarra, F.M. Stress-driven modeling of nonlocal thermoelastic behavior of nanobeams. Int. J. Eng. Sci. 2018, 126, 53–67. [Google Scholar] [CrossRef] [Green Version]
- Barretta, R.; Luciano, R.; de Sciarra, F.M.; Ruta, G. Stress-driven nonlocal integral model for Timoshenko elastic nano-beams. Eur. J. Mech. A Solids 2018, 72, 275–286. [Google Scholar] [CrossRef]
- Barretta, R.; Fabbrocino, F.; Luciano, R.; de Sciarra, F.M. Closed-form solutions in stress-driven two-phase integral elasticity for bending of functionally graded nano-beams. Physica E 2018, 97, 13–30. [Google Scholar] [CrossRef]
- Barretta, R.; Canadija, M.; Marotti de Sciarra, F. Modified Nonlocal Strain Gradient Elasticity for Nano-Rods and Application to Carbon Nanotubes. Appl. Sci. 2019, 9, 514. [Google Scholar] [CrossRef] [Green Version]
- Canadija, M.; Barretta, R.; Marotti de Sciarra, F. A gradient elasticity model of Bernoulli-Euler nanobeams in non-isothermal environments. Eur. J. Mech. A Solids 2016, 55, 243–255. [Google Scholar] [CrossRef]
- Canadija, M.; Barretta, R.; Marotti de Sciarra, F. On functionally graded Timoshenko nonisothermal nanobeams. Compos. Struct. 2016, 135, 286–296. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Calculate stiffnesses: | , | |
| , | ||
| Coupled formulation: | , | |
| . | ||
| Boundary conditions: | ||
| Constitutive boundary | ||
| conditions: | ||
| Calculate stiffnesses: | , | |
| , | ||
| Axial displacements: | ||
| Constitutive boundary | ||
| conditions: | ||
| Boundary conditions: | ||
| Transverse displacements: | ||
| Constitutive boundary | ||
| conditions: | ||
| Boundary conditions: | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barretta, R.; Čanađija, M.; Marotti de Sciarra, F. Nonlocal Mechanical Behavior of Layered Nanobeams. Symmetry 2020, 12, 717. https://doi.org/10.3390/sym12050717
Barretta R, Čanađija M, Marotti de Sciarra F. Nonlocal Mechanical Behavior of Layered Nanobeams. Symmetry. 2020; 12(5):717. https://doi.org/10.3390/sym12050717
Chicago/Turabian StyleBarretta, Raffaele, Marko Čanađija, and Francesco Marotti de Sciarra. 2020. "Nonlocal Mechanical Behavior of Layered Nanobeams" Symmetry 12, no. 5: 717. https://doi.org/10.3390/sym12050717
APA StyleBarretta, R., Čanađija, M., & Marotti de Sciarra, F. (2020). Nonlocal Mechanical Behavior of Layered Nanobeams. Symmetry, 12(5), 717. https://doi.org/10.3390/sym12050717