1. Introduction
An uncertain differential equation (abbreviated as UDE) is a kind of mathematical model to describe physical processes in uncertain environments [
1,
2,
3]. To model human belief degree, on the basis of normality, subadditivity and product axioms, uncertain theory is introduced elaborately in [
1]. A product axiom defining uncertain measures in uncertain theory is the essential difference from probability theory. Probability theory is suitable for big data analysis, while uncertain theory is appropriate for the situation of fewer data information. Subsequently, UDE theory is expounded in [
2,
3]. UDE is driven by the Liu process. As a counterpart of Wiener process, the Liu process can be used to deal with white noise [
1,
2,
3]. The Liu process is stationary and has independent normal increment. More specifically, it almost certainly possesses Lipschitz continuous sample paths. In the UDE model, the noise term can be seen as a normal uncertain variable with an expected value of 0 and variance of 1. Refs. [
4,
5,
6] investigate the well-posedness of some UDEs. Refs. [
7,
8,
9,
10,
11,
12] analyze asymptotic stability, stability in mean, moment exponential stability, almost sure stability, exponential stability and stability in distribution of UDEs. Analytic solutions of some UDEs are studied in [
13,
14,
15,
16], while numerical investigations are developed in [
17,
18,
19,
20,
21,
22,
23], such as the Euler method, Runge–Kutta methods, Adams methods, Milne method, Hamming method and difference method. Since it is hard to obtain exact solutions of UDEs in practice, numerical analysis is very important for applications of UDEs [
24].
Stochastic Hamiltonian systems, as a kind of structure-preserving stochastic differential equations, are used to simulate dynamic systems under stochastic dissipative disturbance [
25,
26,
27,
28,
29,
30]. If the disturbances are seen as white noise, stochastic Hamiltonian systems can be written as stochastic differential equations driven by Wiener processes. Since stochastic Hamiltonian systems possess symplectic geometric structures and symmetries, they are used to describe approximately conservative physical processes in some cases. However, in other practical cases, the stochastic Hamiltonian system model is imperfect for empirical analysis. An illustrative example is given in
Appendix A. In modeling real dynamic systems in uncertain environments, it is more reasonable to treat dissipative disturbances as uncertain factors. Whether from the perspective of completeness of mathematical research or from the perspective of providing new models for different application problems, it makes sense to study uncertain dynamic systems with symplectic geometric structures.
So, in this paper, based on the Liu process, we present uncertain Hamiltonian system models. Similarly to stochastic counterparts, uncertain Hamiltonian systems possess uncertain symplectic structures and symmetries and can imply some essential physical property of uncertain dynamic systems. The contribution of this paper is as follows.
We present a kind of symplectic-structure-preserving UDE, an uncertain Hamiltonian system. We prove the structure-preserving property of uncertain Hamiltonian system. It is a good supplement to the model of stochastic Hamiltonian systems;
We analyze the well-posedness and path distributions of general dimension and factor UDEs. Naturally, under the Lipschitz continuity and linear growth condition, the uncertain Hamiltonian system is well-posed. With paths, the inverse uncertainty distribution of uncertain Hamiltonian system can be obtained;
We give an algorithm by applying a symplectic scheme with high precision and Yao-Chen algorithm to solve path solutions and expected values of uncertain Hamiltonian systems. We also carry out numerical experiments to test the effectiveness of the algorithm.
The rest of this paper is arranged as follows. In
Section 2, we investigate the well-posedness and
-path distributions of a kind of
dimension and
n-factor UDEs. In
Section 3, an uncertain Hamiltonian system is presented. We evidence the structure-preserving property of uncertain Hamiltonian systems. An algorithm is also given to compute
-path solutions and expected values of uncertain Hamiltonian systems. A numerical experiment is carried out in
Section 4 to confirm the effectiveness of our algorithm. The conclusion is given in
Section 5. In
Appendix A, we list a paradox of stochastic Hamiltonian systems in one case.
2. Multi-Dimensional and Multiple-Factor UDE
In this paper, we consider the following initial value problem of
-dimension and
n-factor UDE
where
are
m-dimension vectors with components
respectively. Assume that
are appropriately smooth functions. Here,
are independent
dimensional Liu processes. They are Lipschitz continuous processes with independent and stationary increments to describe uncertain white noises [
1,
2,
3]. Every increment
is a normal uncertain variable with an uncertain distribution [
1,
2,
3]
Remark 1. The basic differences of the Liu process from the Wiener process are as follows.
- (1)
Increment of Liu process obeys normal uncertain distribution (2), while for the Wiener process, is . - (2)
Almost all sample paths of the Liu process are Lipschitz continuous, while for Wiener process, the sample path is not Lipschitz continuous; it is uniformly Hölder continuous for each exponent but is not Hölder continuous with any exponent .
- (3)
The uncertain white noise can be seen as a normal uncertain variable with an expected value of 0 and variance of 1, while the stochastic white noise a normal random variable with an expected value of 0 and variance of 1/dt.
Similarly to the proof of Theorem 4.1, in [
4], by applying Lemma 4.1 in [
4], we prove the following well-posedness proposition.
Proposition 1. Let be functions with three variables. Assume that are independent dimensional Liu processes. Under the following Lipschitz continuity and linear growth condition the uncertain system (1) is solvable uniquely and satisfies sample-continuity. Proof of Proposition 1. Let
Define iterative sequences as follows
Denote
. For each sample
, let
be the sum of Lipschitz constants
for
First, we have
Similarly, we obtain
Therefore, we obtain
Similarly, we have
This implies that
By mathematical induction, we derive
According to the Weierstrass criterion, the inequality (
3) ensures that
converge uniformly for
Denote their limits by
Then, by uniform convergence and integrality, we obtain
The above integral form is equivalent to the uncertain system (
1).
Suppose that system (
1) has two solutions
and
. Then, we obtain
The Gronwall inequality yields
Thus, system (
1) is uniquely solvable.
The inequality (
3) ensures that
are bounded by
Assume that
We derive
Therefor, as Similarly, also has sample-continuity. □
In many cases, it is difficult to find an analytical solution or its uncertain distribution of a general UDE (
1). Alternatively, the solution of a UDE can be represented by that of a spectrum of deterministic systems, which is called
paths [
1,
2,
3,
17,
18,
19,
20,
21,
22,
23]. Yao-Chen formula in [
3] relates UDEs and deterministic systems, just like the Feynman-Kac formula relates stochastic differential equations and deterministic systems.
paths provide a method to solve a UDE. So according to Yao-Chen formula, Yao-Chen algorithm is designed to solve UDEs numerically [
3].
Below, according to [
1,
2,
3,
17,
18,
19,
20,
21,
22,
23], we define
-path solutions
of the system (
1) as solutions of the following deterministic system
where the inverse normal uncertainty distribution is
Remark 2. α is a stochastic parameter belonging to the open interval . The α-path simply denotes the solution of Equation (6) determined for a prescribed value of α. Remark 3. If α is considered a prescribed real number, then Equation (6) for the numerical solution can just be treated as ordinary differential equations and not as stochastic differential equations. Remark 4. If some suitable Hamiltonian functions exist such thatthen Equation (6) is an ordinary Hamiltonian system. Similar to the Yao-Chen formula in [
3], we prove the following conclusion on inverse uncertainty distributions.
Theorem 1. Suppose that and are the solution and path of the system (1), respectively. Then,where denote the uncertain measure. Proof of Theorem 1. Similar to the analyses in [
1,
2,
3,
4,
5,
6], we make the following notations
Then, we have
For
Therefore, we obtain Moreover,
Then, we have
For
Therefore, we obtain Moreover,
The duality of uncertain measure yields
Similarly, according to systems (
1) and (
6), we can derive
So, the uncertain solutions possess inverse uncertainty distributions , respectively. □
According to similar analysis in [
1,
2,
3,
17,
18,
19,
20,
21,
22,
23], we can apply some numerical methods to solve inverse uncertainty distributions
of
, and the expected values
can be computed as follows
3. Uncertain Hamiltonian System
Suppose that some Hamiltonian functions
exist such that
Then, we call the Equation (
1) a
-dimension
n-factor uncertain Hamiltonian system. A Hamiltonian system is a dynamical system completely described by the scalar Hamiltonian functions. Similarly to stochastic Hamiltonian systems, the uncertain Hamiltonian system preserves a uncertain symplectic 2-form:
The following theorem shows that an uncertain Hamiltonian system preserves a uncertain symplectic structure.
Theorem 2. The uncertain Hamiltonian systems (1) and (8) have uncertain symplectic structures Proof. (Proof of Theorem 2) System (
1) is rewritten formally as
which yields
According to the definition of exterior differential, we have
Noting that
by taking the condition (
8) into account, we derive
Clearly, By repeating the above analysis, we obtain Therefore, which means that is an invariant. Hence, . □
Some mechanical systems can be described by vibration process. [
31] studies how to determine the frequency property of nonlinear oscillator by using a Hamiltonian-based formulation. Below four uncertain Hamiltonian systems are given as counterparts of stochastic Hamiltonian systems [
32], where
and
denote the displacement and the velocity of four oscillators under different uncertain perturbations, respectively.
Example 1. Consider the following linear uncertain oscillator It is a uncertain Hamiltonian system with Hamiltonian functions
The Hamiltonian functions corresponding to
-path are as follows
Example 2. Consider the following uncertain Kubo oscillator It is a uncertain Hamiltonian system with Hamiltonian functions
The Hamiltonian functions corresponding to
path are as follows
Example 3. Consider the following 2-factor linear uncertain oscillator It is a 2-factor uncertain Hamiltonian system with Hamiltonian functions
The Hamiltonian functions corresponding to the
-path are as follows
Example 4. Consider the following 2-factor nonlinear uncertain oscillator It is a 2-factor uncertain Hamiltonian system with Hamiltonian functions
The Hamiltonian functions corresponding to the
-path are as follows
The three stage symplectic Runge–Kutta scheme with six-order accuracy applied to deterministic differential equation
yields
where
,
,
,
,
Scheme (
14) can be applied to solve
-path solutions of uncertain Hamiltonian systems.
According to above analysis in
Section 2, the inverse uncertain distribution and expected values could be obtained via
-paths. In many cases, it is impossible to find the exact inverse uncertain distribution, so we need apply some appropriate numerical methods to efficiently and approximately solve the inverse uncertain distribution. On the basis of the work of [
17,
18,
19,
20,
21,
22,
23], to simulate uncertain Hamiltonian systems (
1) and (
8), we design the following algorithm by applying Yao-Chen algorithm and symplectic Runge–Kutta scheme (
14).
Step 1. Choose
Step 2. Apply symplectic Runge–Kutta scheme (
14) to deterministic system (
6) and obtain
-path solutions
of uncertain Hamiltonian systems (
1) and (
8).
Step 3. Basing on we analyze uncertainty solutions and compute expected values .
Above algorithm has high precision and preserves symplectic structure of -paths.
4. Numerical Results
Now, we apply the above algorithm to solve four uncertain Hamiltonian system examples in
Section 3.
First, we solve Example 1.
It is easy to check that the
-path solution of (
10) is
Below, we choose
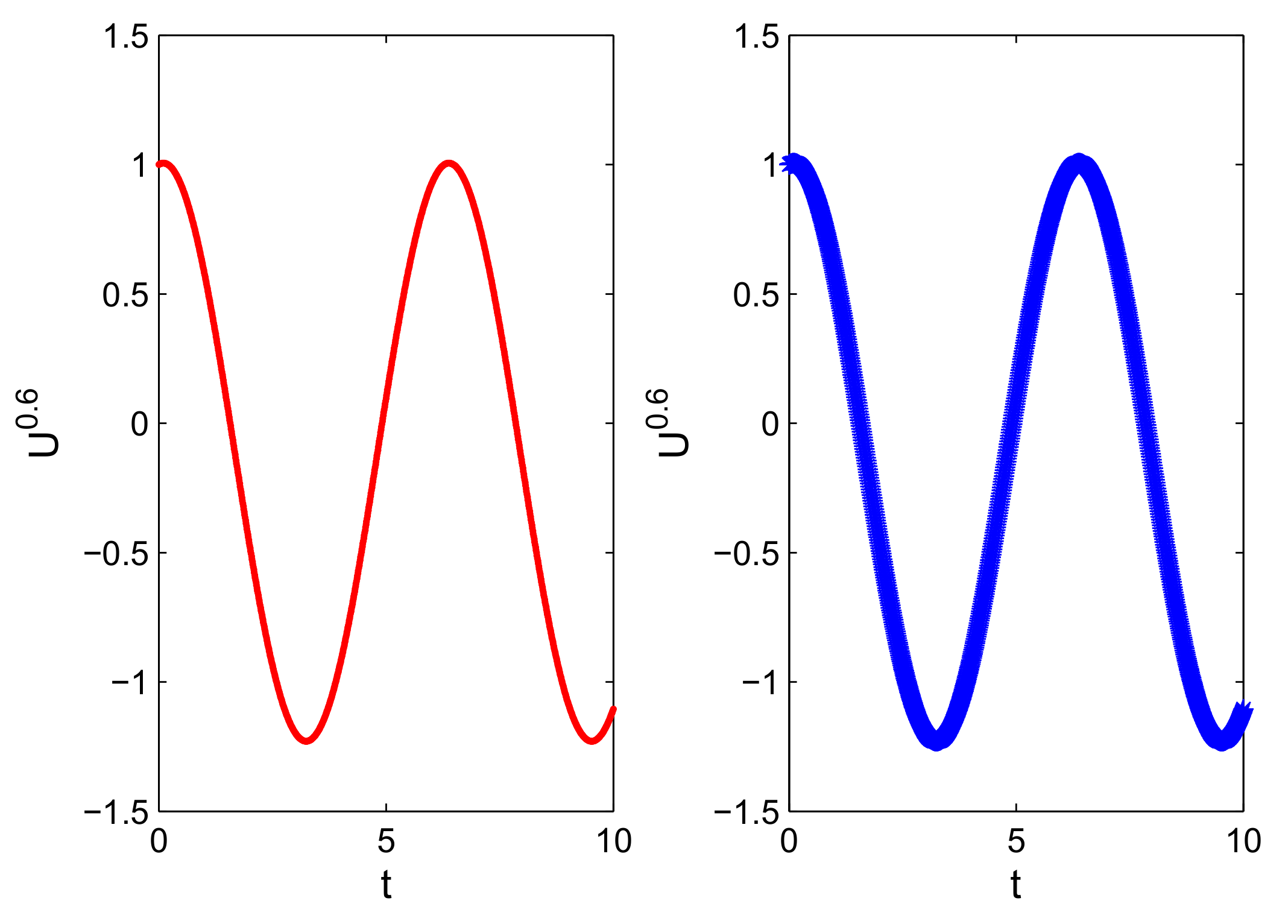
The numerical (left) vs. exact (right) trajectories of uncertain distributions for
with
and
are plotted in
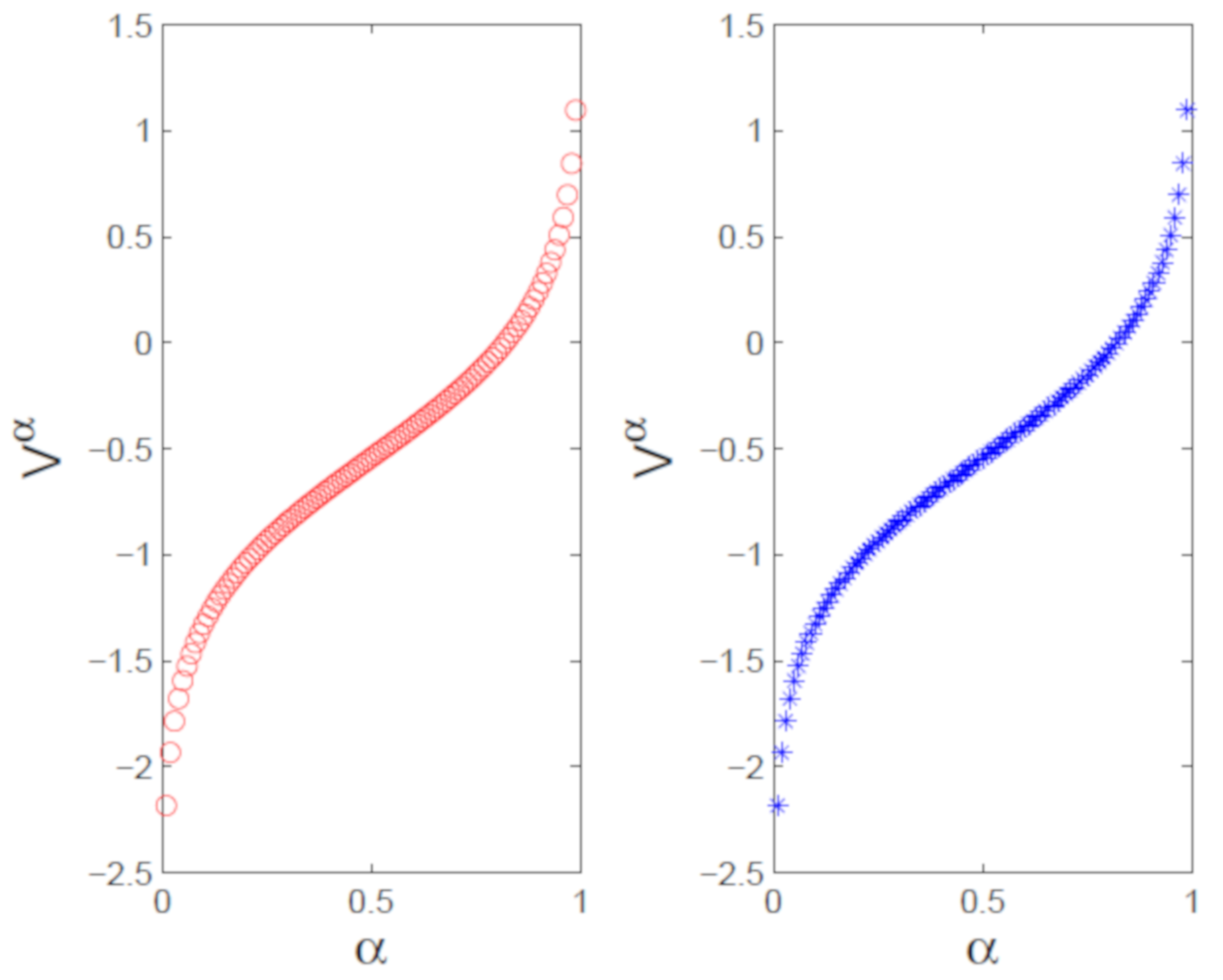
Figure 1. Numerical (left) vs. exact (right) uncertain distributions
with
and
are depicted in
Figure 2.
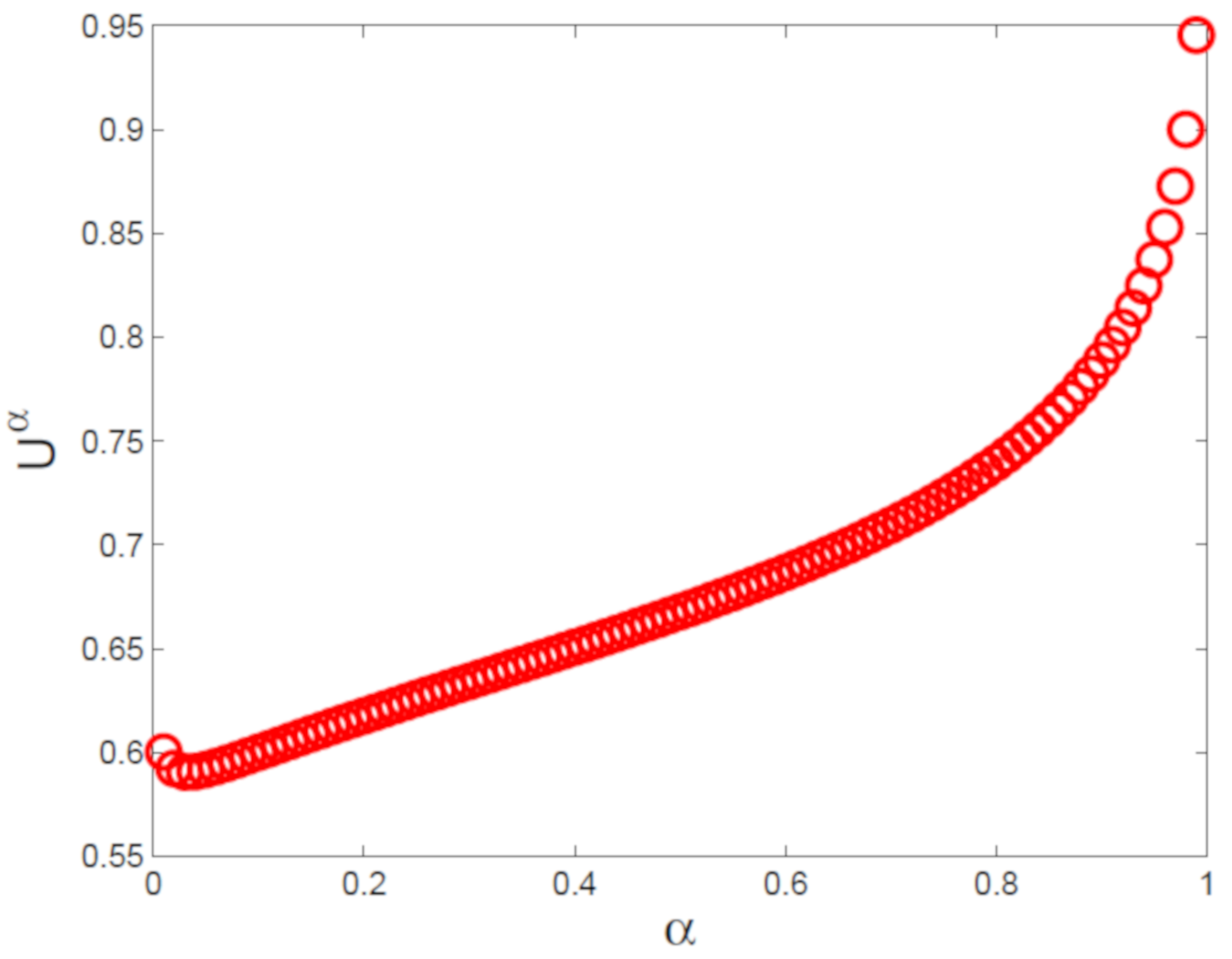
Figure 3 shows the numerical errors of
(left) and
(right). We can see that the errors are very small. In
Figure 4 and
Figure 5, numerical (left) and exact (right) expected value curves
and
for
are drawn, respectively. As expected, the figures show that our algorithm can simulate the uncertain distributions and expected values very well. We also obtain the expectations with
as follows.
Second, we solve Example 2.
The
path solution of (
11) satisfies
Here, we choose
The numerical trajectories of uncertain distributions
with
and
are plotted in
Figure 6. Numerical uncertain distributions for
with
,
and
are depicted in
Figure 7. In
Figure 8, numerical expected value curves
(left) and
(right) for
are drawn. We also obtain the expectations with
as follows.
Third, we solve Example 3.
It is easy to check that the
path solution of (
12) is
Below, we choose
The numerical (left) vs. exact (right) trajectories of uncertain distributions for
with
and
are plotted in
Figure 9. Numerical (left) vs. exact (right) uncertain distributions
with
and
are depicted in
Figure 10.
Figure 11 shows the numerical errors of
(left) and
(right). We can see that the errors are very small. In
Figure 12 and
Figure 13, numerical (left) and exact (right) expected value curves
and
for
are drawn, respectively. As expected, the figures show that our algorithm can simulate the uncertain distributions and expected values very well. We also obtain the expectations with
as follows.
At last, we solve Example 4.
The
path solution of (
13) satisfies
Here, we choose
The numerical trajectories of uncertain distributions
with
and
are plotted in
Figure 14. Numerical uncertain distributions for
with
,
and
are depicted in
Figure 15. In
Figure 16, numerical expected value curves
(left) and
(right) for
are drawn. We also obtain the expectations with
as follows.
5. Conclusions
This paper proposes a kind of
-dimension
n-factor uncertain differential equations driven by Liu processes. Under Lipschitz continuity and linear growth conditions, the uncertain systems (
1) are uniquely solvable and satisfy sample-continuity. The uncertain solutions
possess inverse uncertainty distributions
, respectively. We can compute expected values
by inverse uncertainty distributions. As a supplement of stochastic Hamiltonian systems, an uncertain Hamiltonian system is presented which presents an uncertain symplectic structure. Several examples of uncertain Hamiltonian systems are given. Numerical methods are a kind of important tools to investigate uncertain Hamiltonian systems. Symplectic Runge–Kutta scheme with six-order accuracy and Yao-Chen algorithm are applied to design an algorithm to solve inverse uncertain distributions of uncertain Hamiltonian systems and expected values of the uncertain solutions. The numerical results show the efficiency of our algorithm. For future work, applications of uncertain Hamiltonian systems could be studied, and other structure preserving generalizations, such as uncertain energy conservation systems, could be considered.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















