
Review of Selected Issues in Anisotropic Plasticity under Axial Symmetry



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. General Axisymmetric Elastic–Plastic Solution under Plane Stress
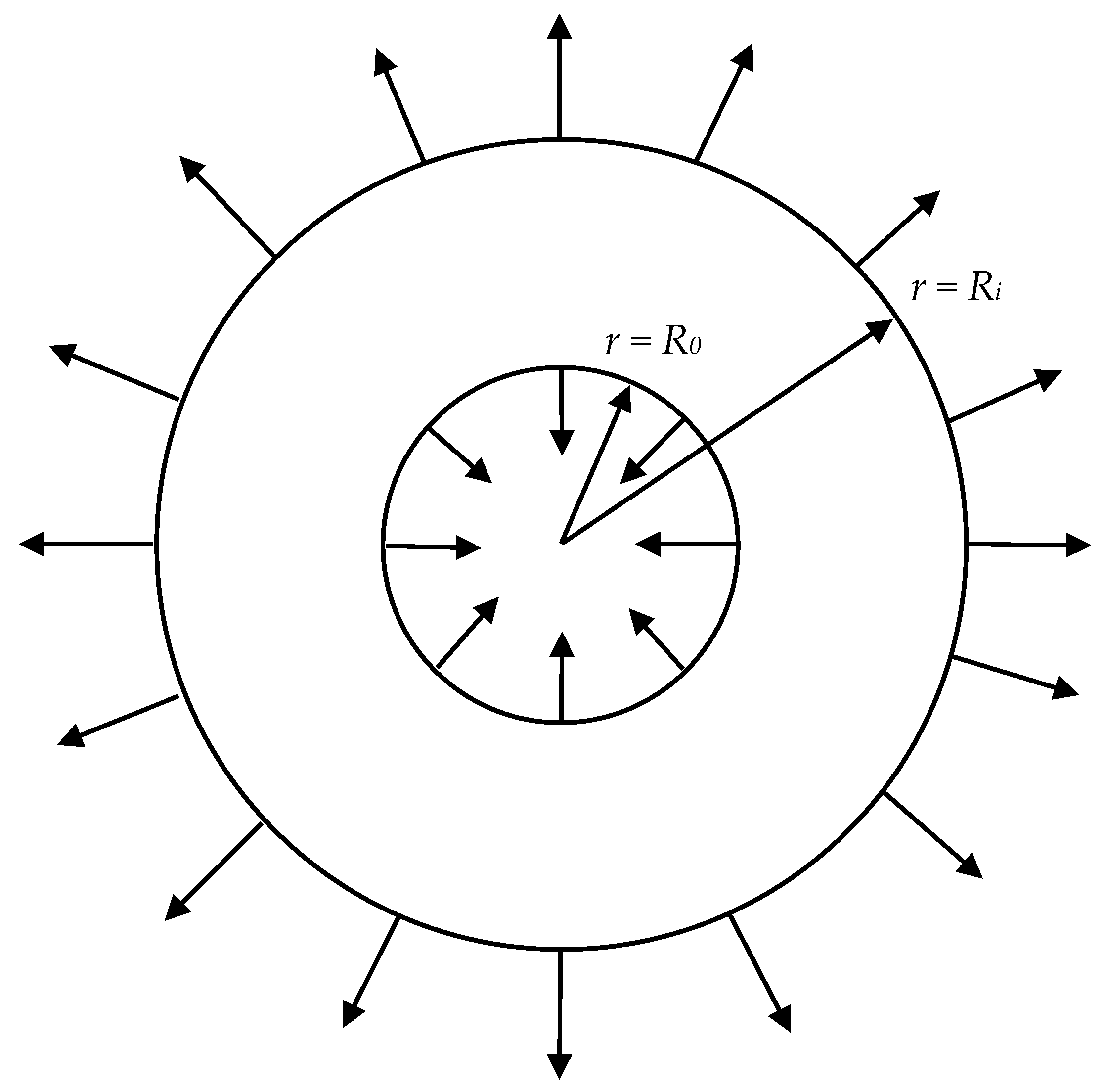
2.1. Statement of the Problem
2.2. General Elastic Solution
2.3. General Solution in Plastic Regions
2.4. Illustrative Example
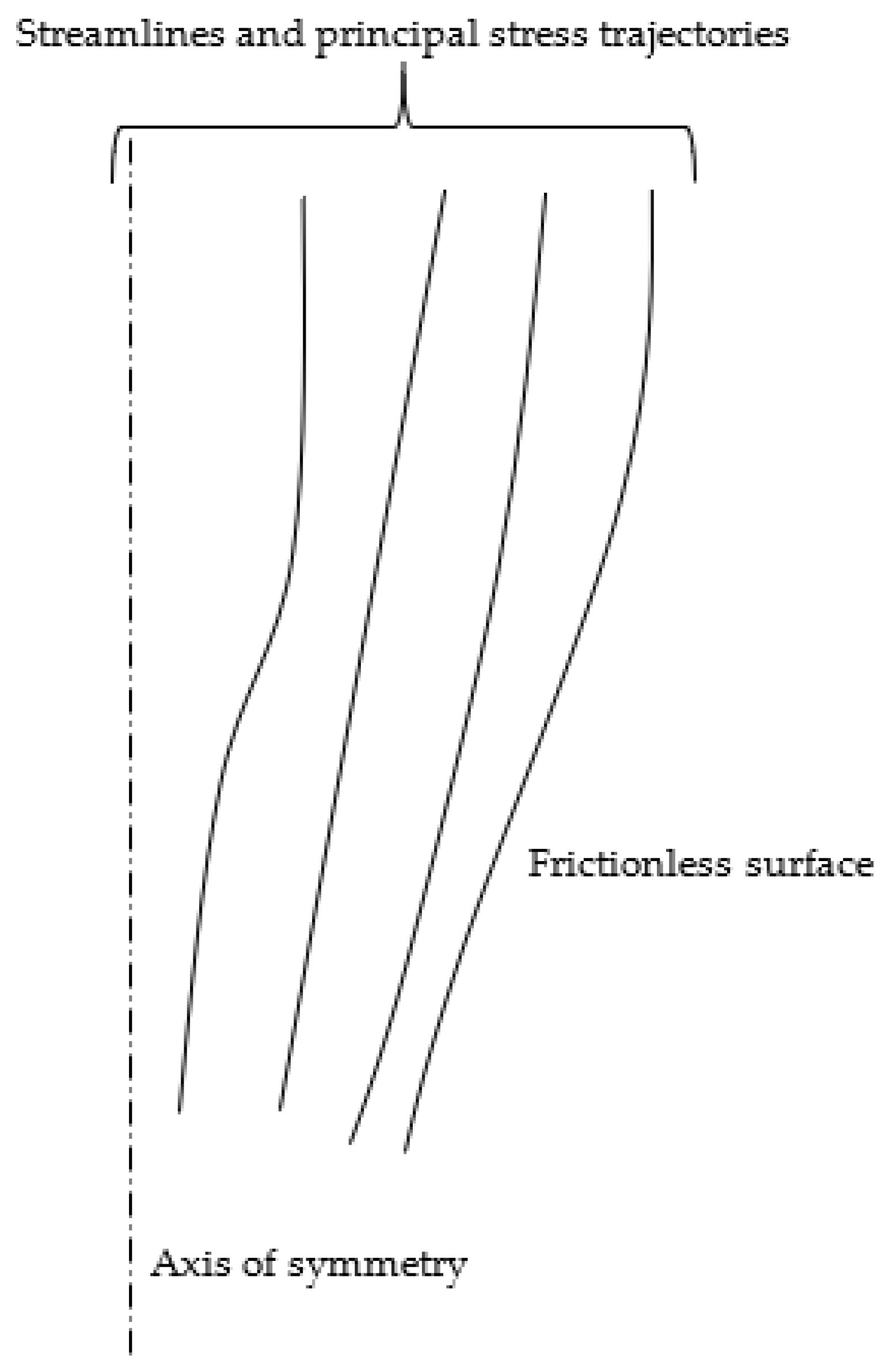
3. Axisymmetric Steady Ideal Flows
3.1. Constitutive Equations
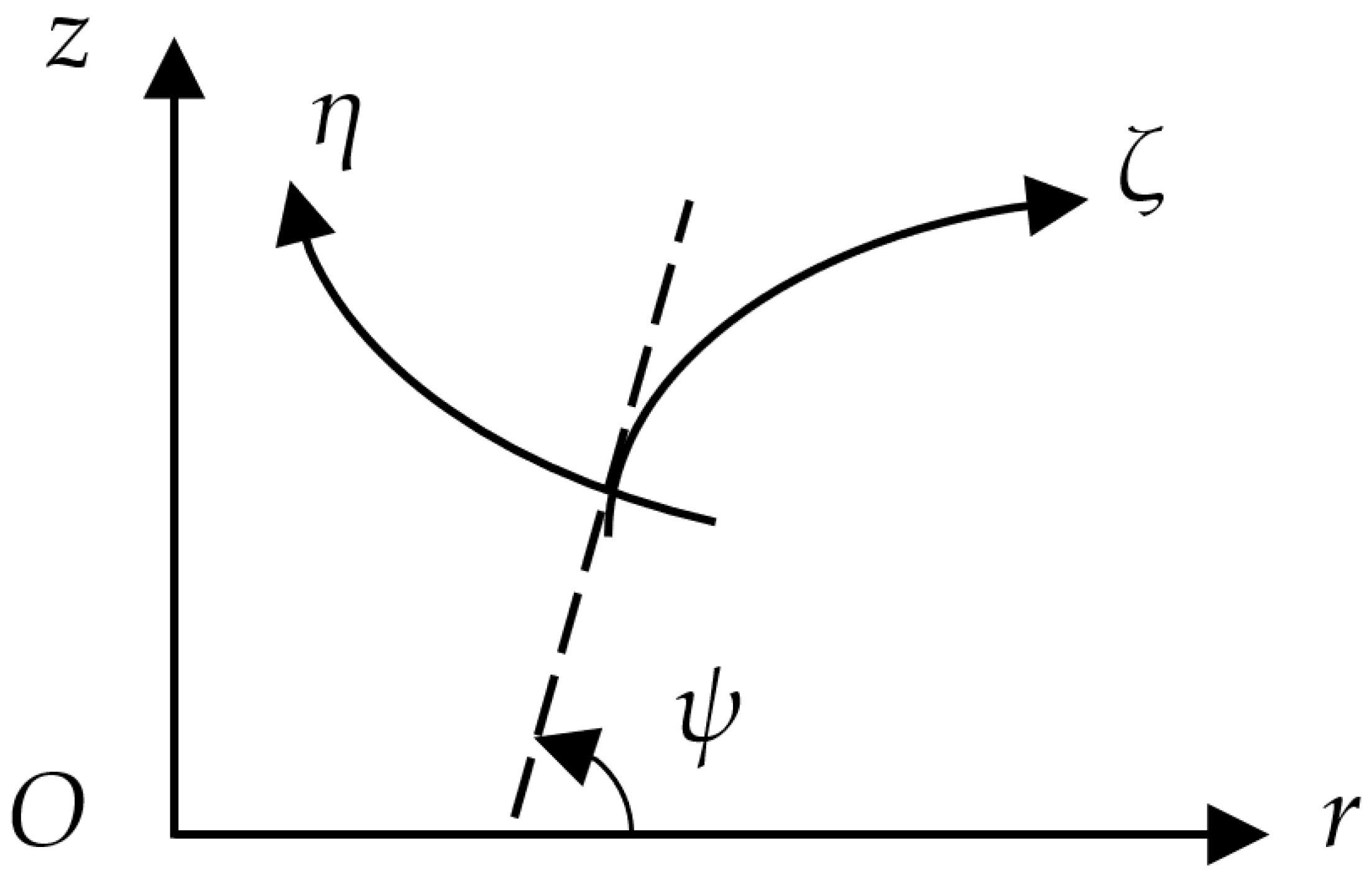
3.2. Geometric Properties of the Principal Lines Coordinate System
3.3. Existence of Ideal Flows
4. Miscellaneous Topics
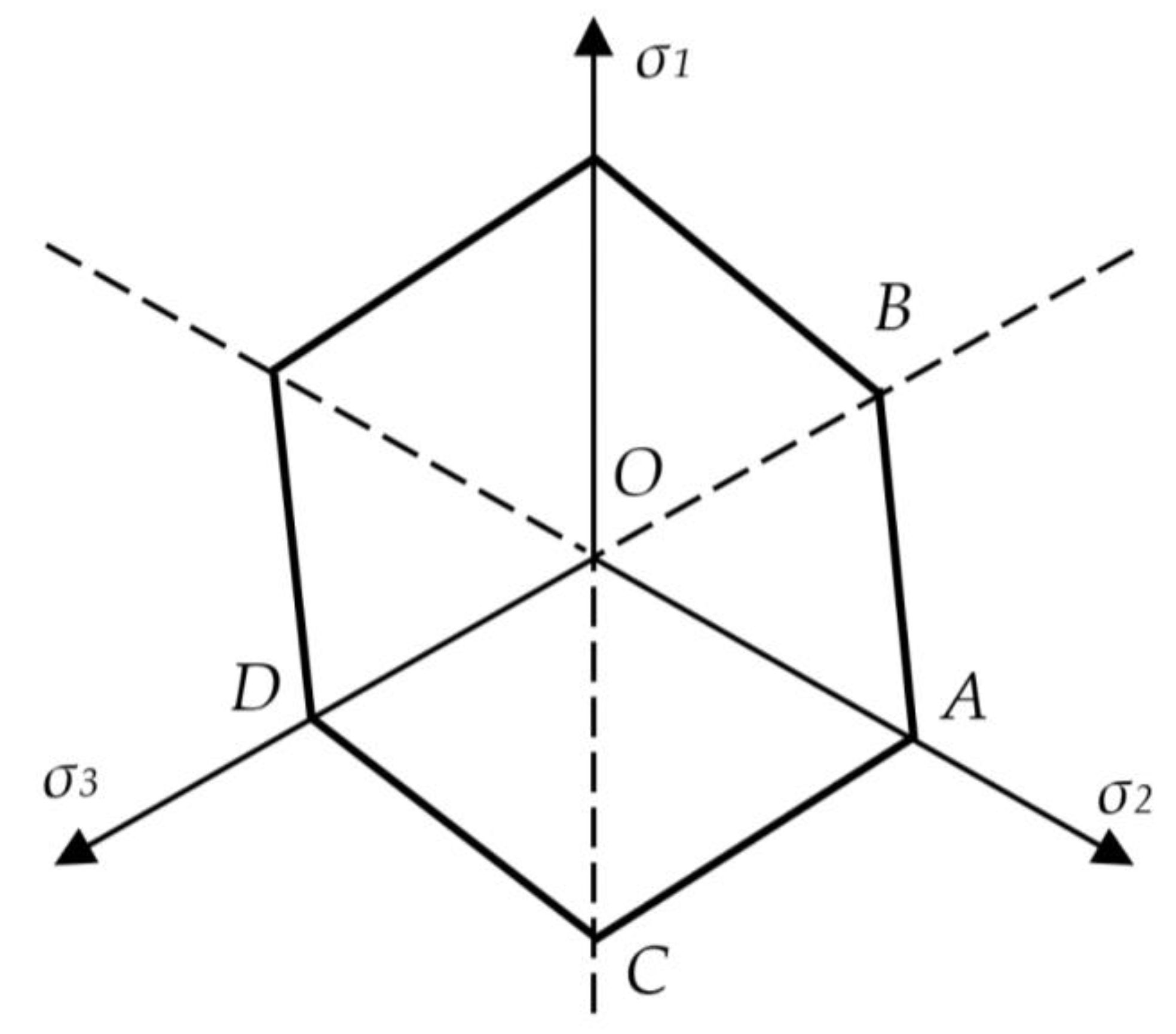
4.1. Yield Criterion
4.2. Limit Load
4.3. Singular Solutions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Varga, O.H. Stress-Strain Behaviour of Elastic Materials; Interscience: New York, NY, USA, 1966. [Google Scholar]
- Hill, J.M.; Arrigo, D.J. Transformations and equation reductions in finite elasticity I: Plane strain deformations. Math. Mech. Solids 1996, 1, 155–175. [Google Scholar] [CrossRef]
- Hill, J.M.; Arrigo, D.J. Transformations and equation reductions in finite elasticity II: Plane stress and axially symmetric deformations. Math. Mech. Solids 1996, 1, 177–192. [Google Scholar] [CrossRef]
- Murphy, J.G. Irrotational deformations in finite compressible elasticity. Math. Mech. Solids 1997, 2, 491–502. [Google Scholar] [CrossRef]
- Israilov, M.S. Reduction of boundary value problems of dynamic elasticity to scalar problems for wave potentials in curvilinear coordinates. Mech. Solids 2011, 46, 104–108. [Google Scholar] [CrossRef]
- Ostrosablin, N.I. The general solution and reduction to diagonal form of a system of equations of linear isotropic elasticity. J. Appl. Ind. Math. 2010, 4, 354–358. [Google Scholar] [CrossRef]
- Simmonds, J.G. Reduction of the linear Sanders-Koiter shell equations for nondevelopable midsurfaces to two coupled equations. ASME J. Appl. Mech. 1975, 42, 511–513. [Google Scholar] [CrossRef]
- Reissner, E. On reductions of the differential equations for circular cylindrical shells. Ingenieur-Archiv 1972, 41, 291–296. [Google Scholar] [CrossRef]
- Zhou, Y.; Huang, K. An effective general solution to the inhomogeneous spatial axisymmetric problem and its applications in functionally graded materials. Acta Mech. 2021, 232, 4199–4215. [Google Scholar] [CrossRef]
- Tokovyy, Y.V. Reduction of a three-dimensional elasticity problem for a finite-length solid cylinder to the solution of systems of linear algebraic equations. J. Math. Sci. 2013, 190, 683–696. [Google Scholar] [CrossRef]
- Durban, D. An approximate method in plane-stress small strain plasticity. ASME J. Appl. Mech. 1987, 54, 968–970. [Google Scholar] [CrossRef]
- Alexandrova, N.; Alexandrov, S. Elastic-plastic stress distribution in a plastically anisotropic rotating disk. Trans. ASME J. Appl. Mech. 2004, 71, 427–429. [Google Scholar] [CrossRef]
- Alexandrova, N.; Real, P.M.M.V. Elastic-plastic stress distribution in a plastically anisotropic rotating disk. Thin-Walled Struct. 2006, 44, 897–903. [Google Scholar] [CrossRef]
- Peng, X.-L.; Li, X.-F. Elastic analysis of rotating functionally graded polar orthotropic disks. Int. J. Mech. Sci. 2012, 60, 84–91. [Google Scholar] [CrossRef]
- Essa, S.; Argeso, H. Elastic analysis of variable profile and polar orthotropic FGM rotating disks for a variation function with three parameters. Acta Mech. 2017, 228, 3877–3899. [Google Scholar] [CrossRef]
- Jeong, W.; Alexandrov, S.; Lang, L. Effect of plastic anisotropy on the distribution of residual stresses and strains in rotating annular disks. Symmetry 2018, 10, 420. [Google Scholar] [CrossRef] [Green Version]
- Yildirim, V. Numerical/analytical solutions to the elastic response of arbitrarily functionally graded polar orthotropic rotating discs. J. Brazilian Soc. Mech. Sci. Eng. 2018, 40, 320. [Google Scholar] [CrossRef]
- Leu, S.-Y.; Hsu, H.-C. Exact solutions for plastic responses of orthotropic strain-hardening rotating hollow cylinders. Int. J. Mech. Sci. 2010, 52, 1579–1587. [Google Scholar] [CrossRef]
- Abd-Alla, A.M.; Mahmoud, S.R.; AL-Shehri, N.A. Effect of the rotation on a non-homogeneous infinite cylinder of orthotropic material. Appl. Math. Comp. 2011, 217, 8914–8922. [Google Scholar] [CrossRef]
- Lubarda, V.A. On pressurized curvilinearly orthotropic circular disk, cylinder and sphere made of radially nonuniform material. J. Elast. 2012, 109, 103–133. [Google Scholar] [CrossRef]
- Croccolo, D.; De Agostinis, M. Analytical solution of stress and strain distributions in press fitted orthotropic cylinders. Int. J. Mech. Sci. 2013, 71, 21–29. [Google Scholar] [CrossRef]
- Shahani, A.R.; Torki, H.S. Determination of the thermal stress wave propagation in orthotropic hollow cylinder based on classical theory of thermoelasticity. Cont. Mech. Thermodyn. 2018, 30, 509–527. [Google Scholar] [CrossRef]
- Rynkovskaya, M.; Alexandrov, S.; Lang, L. A theory of autofrettage for open-ended, polar orthotropic cylinders. Symmetry 2019, 11, 280. [Google Scholar] [CrossRef] [Green Version]
- Lyamina, E. Effect of plastic anisotropy on the collapse of a hollow disk under thermal and mechanical loading. Symmetry 2021, 13, 909. [Google Scholar] [CrossRef]
- Chung, K.; Alexandrov, S. Ideal flow in plasticity. Appl. Mech. Rev. 2007, 60, 316–335. [Google Scholar] [CrossRef]
- Richmond, O.; Devenpeck, M.L. A die profile for maximum efficiency in strip drawing. In Proceedings of the 4th US National Congress of Applied Mechanics, Berkeley, CA, USA, 18–21 June 1962; Rosenberg, R.M., Ed.; ASME: New York, NY, USA, 1962; Volume 2, pp. 1053–1057. [Google Scholar]
- Richmond, O.; Morrison, H.L. Streamlined wire drawing dies of minimum length. J. Mech. Phys. Solids 1967, 15, 195–203. [Google Scholar] [CrossRef]
- Hill, R. Ideal forming operations for perfectly plastic solids. J. Mech. Phys. Solids 1967, 15, 223–227. [Google Scholar] [CrossRef]
- Richmond, O.; Alexandrov, S. The theory of general and ideal plastic deformations of Tresca solids. Acta Mech. 2002, 158, 33–42. [Google Scholar] [CrossRef]
- Alexandrov, S.; Mustafa, Y.; Lyamina, E. Steady planar ideal flow of anisotropic materials. Meccanica 2016, 51, 2235–2241. [Google Scholar] [CrossRef]
- Collins, I.F.; Meguid, S.A. On the influence of hardening and anisotropy on the plane-strain compression of thin metal strip. ASME J. Appl. Mech. 1977, 44, 271–278. [Google Scholar] [CrossRef]
- Hu, L.W. Modified Tresca’s yield condition and associated flow rules for anisotropic materials and applications. J. Franklin. Inst. 1958, 265, 187–204. [Google Scholar] [CrossRef]
- Barlat, F.; Kuwabara, T.; Korkolis, Y.P. Anisotropic plasticity and application to plane stress. In Encyclopedia of Continuum Mechanic; Altenbach, H., Öchsner, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Malvern, L.E. Introduction to the Mechanics of a Continuous Medium; Prentice-Hall: Englewood Cliffs, NJ, USA, 1969. [Google Scholar]
- Alexandrov, S.; Lyamina, E.A.; Nguyen-Thoi, T. Geometry of principal stress trajectories for a Tresca material under axial symmetry. J. Phys. Conf. Ser. 2018, 1053, 012048. [Google Scholar] [CrossRef] [Green Version]
- Verma, R.K.; Haldar, A. Effect of normal anisotropy on springback. J. Mater. Process. Technol. 2007, 190, 300–304. [Google Scholar] [CrossRef]
- Li, D.; Luo, Y.; Peng, Y.; Hu, P. The numerical and analytical study on stretch flanging of V-shaped sheet metal. J. Mater. Process. Technol. 2007, 189, 262–267. [Google Scholar] [CrossRef]
- Paul, S.K. Non-linear correlation between uniaxial tensile properties and shear-edge hole expansion ratio. J. Mater. Eng. Perform. 2014, 23, 3610–3619. [Google Scholar] [CrossRef]
- Kim, J.H.; Kwon, Y.J.; Lee, T.; Lee, K.-A.; Kim, H.S.; Lee, C.S. Prediction of hole expansion ratio for various steel sheets based on uniaxial tensile properties. Met. Mater. Int. 2018, 24, 187–194. [Google Scholar] [CrossRef]
- Erisov, Y.; Surudin, S.; Alexandrov, S.; Lang, L. Influence of the replacement of the actual plastic orthotropy with various approximations of normal anisotropy on residual stresses and strains in a thin disk subjected to external pressure. Symmetry 2020, 12, 1834. [Google Scholar] [CrossRef]
- Zerbst, U.; Madia, M. Analytical flaw assessment. Eng. Fract. Mech. 2018, 187, 316–367. [Google Scholar] [CrossRef]
- Alexandrov, S.; Tzou, G.-Y.; Hsia, S.-Y. Effect of plastic anisotropy on the limit load of highly undermatched welded specimens in bending. Eng. Fract. Mech. 2008, 75, 3131–3140. [Google Scholar] [CrossRef]
- Alexandrov, S.; Lyamina, E.; Pirumov, A.; Nguyen, D.K. A limit load solution for anisotropic welded cracked plates in pure bending. Symmetry 2020, 12, 1764. [Google Scholar] [CrossRef]
- Picon, R.; Canas, J. On strength criteria of fillet welds. Int. J. Mech. Sci. 2009, 51, 609–618. [Google Scholar] [CrossRef]
- Hasegawa, K.; Dvorak, D.; Mares, V.; Strnadel, B.; Li, Y. Fully plastic failure stresses and allowable crack sizes for circumferentially surface-cracked pipes subjected to tensile loading. ASME J. Press. Ves. Technol. 2022, 144, 011303. [Google Scholar] [CrossRef]
- Rice, J.R. Plane strain slip line theory for anisotropic rigid/plastic materials. J. Mech. Phys. Solids 1973, 21, 63–74. [Google Scholar] [CrossRef]
- Hill, R. Basic stress analysis of hyperbolic regimes in plastic media. Math. Proceed. Camb. Philos. Soc. 1980, 88, 359–369. [Google Scholar] [CrossRef]
- Alexandrov, S.; Jeng, Y.R. Singular rigid/plastic solutions in anisotropic plasticity under plane strain conditions. Continuum. Mech. Thermodyn. 2013, 25, 685–689. [Google Scholar] [CrossRef]
- Facchinetti, M.; Miszuris, W. Analysis of the maximum friction condition for green body forming in an ANSYS environment. J. Europ. Ceramic Soc. 2016, 36, 2295–2302. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alexandrov, S.; Rynkovskaya, M. Review of Selected Issues in Anisotropic Plasticity under Axial Symmetry. Symmetry 2022, 14, 2172. https://doi.org/10.3390/sym14102172
Alexandrov S, Rynkovskaya M. Review of Selected Issues in Anisotropic Plasticity under Axial Symmetry. Symmetry. 2022; 14(10):2172. https://doi.org/10.3390/sym14102172
Chicago/Turabian StyleAlexandrov, Sergei, and Marina Rynkovskaya. 2022. "Review of Selected Issues in Anisotropic Plasticity under Axial Symmetry" Symmetry 14, no. 10: 2172. https://doi.org/10.3390/sym14102172
APA StyleAlexandrov, S., & Rynkovskaya, M. (2022). Review of Selected Issues in Anisotropic Plasticity under Axial Symmetry. Symmetry, 14(10), 2172. https://doi.org/10.3390/sym14102172