BBUNS: Bluetooth Beacon-Based Underground Navigation System to Support Mine Haulage Operations




Abstract
:1. Introduction
2. Materials and Methods
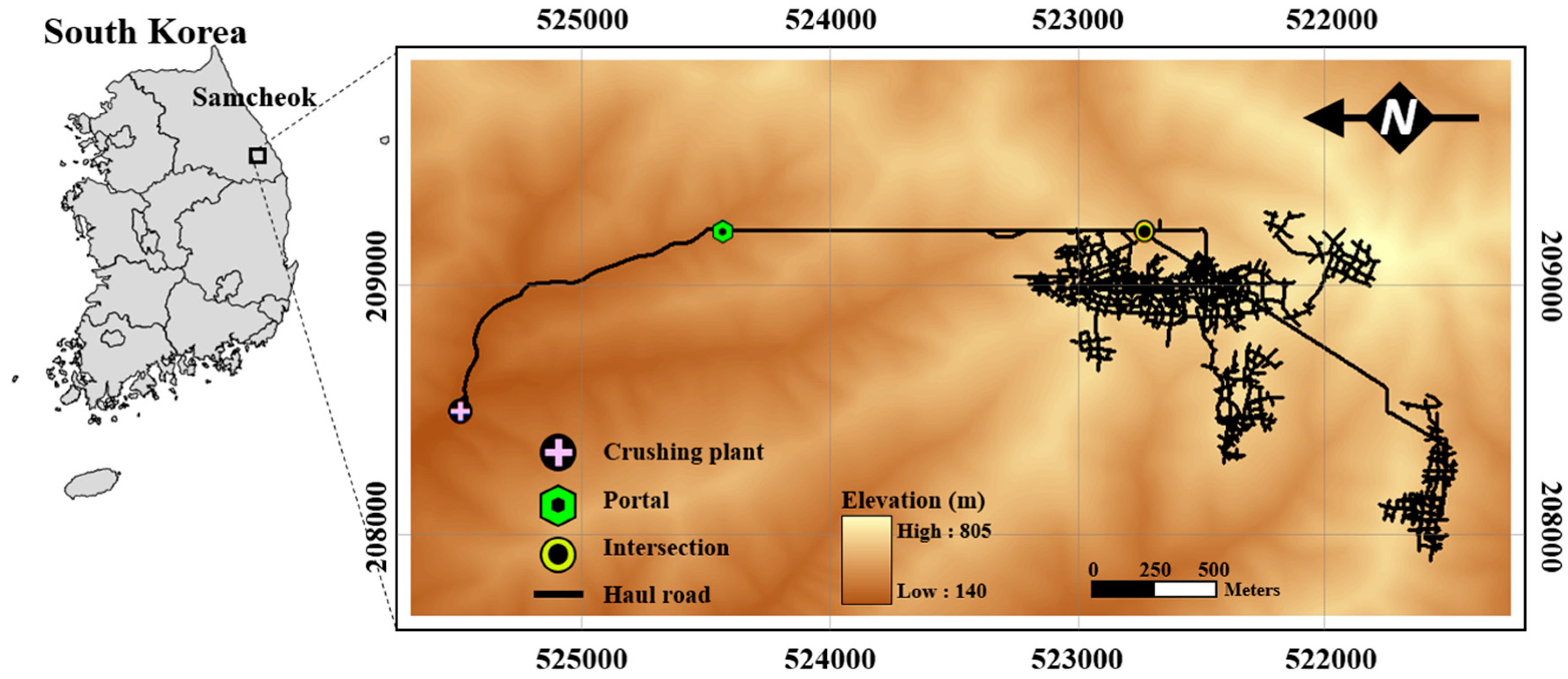
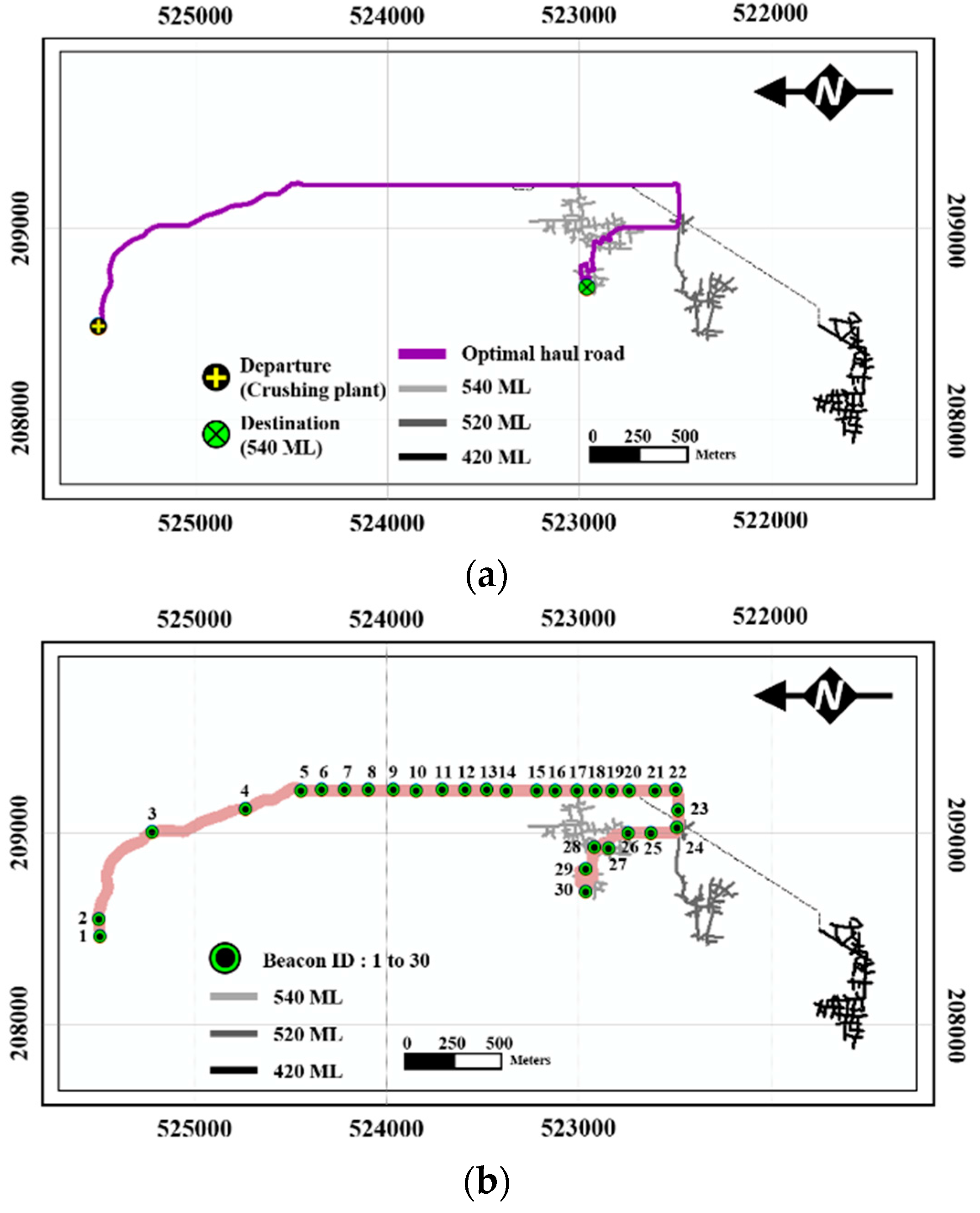
2.1. Study Area
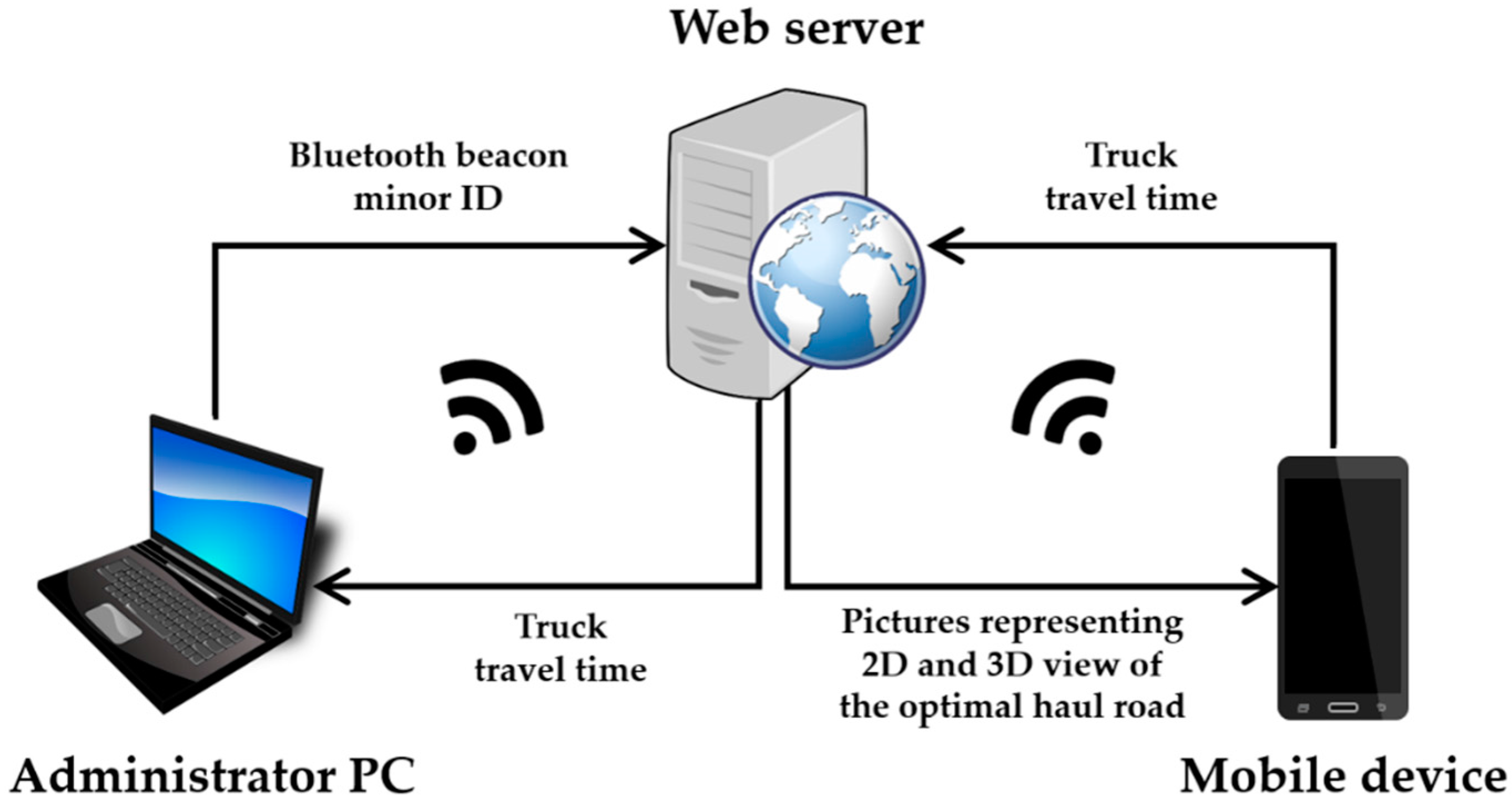
2.2. Design of the Underground Mine Navigation System
2.2.1. Construction of the 3-D GIS Database
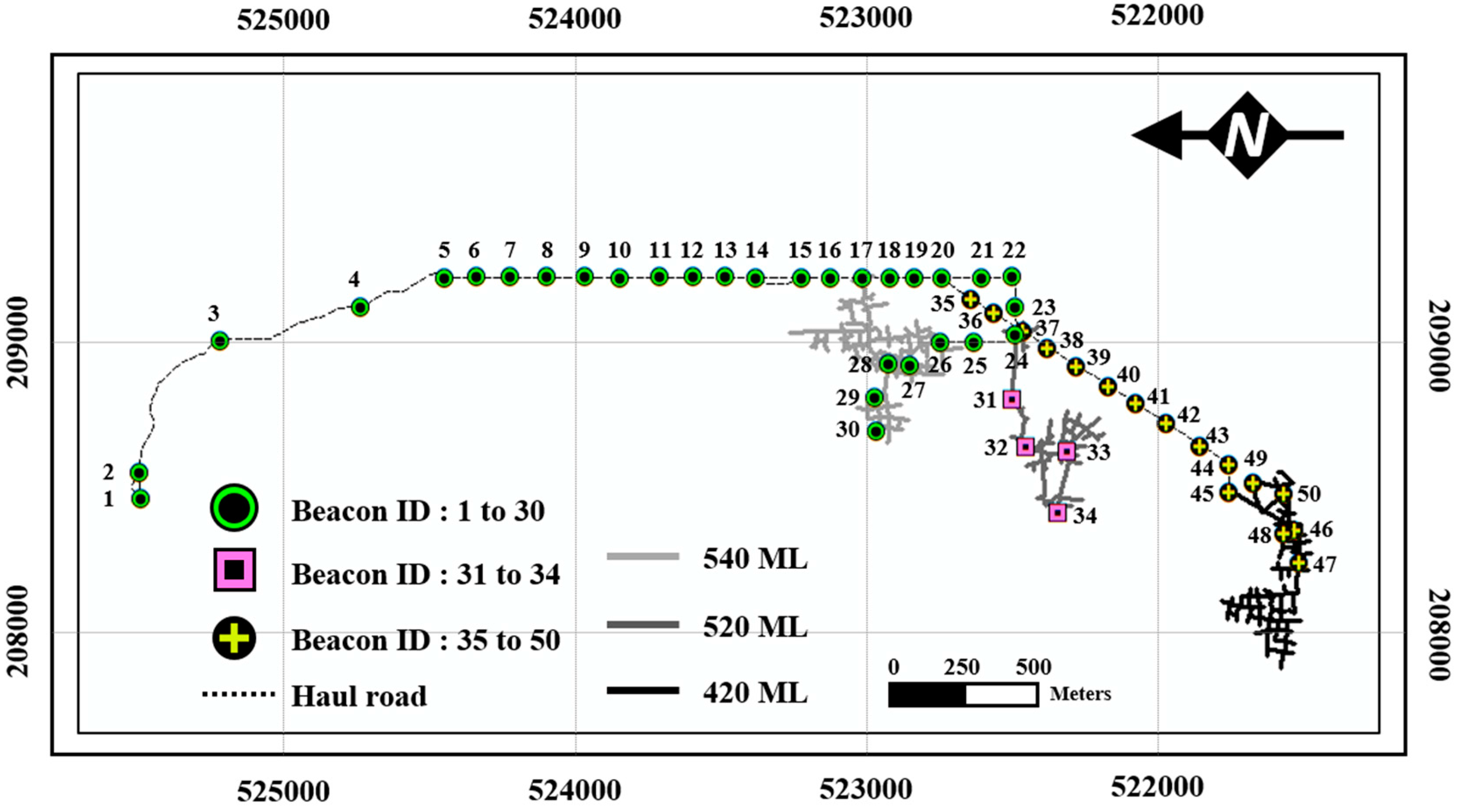
2.2.2. Installation of Bluetooth Beacons in the Underground Mine
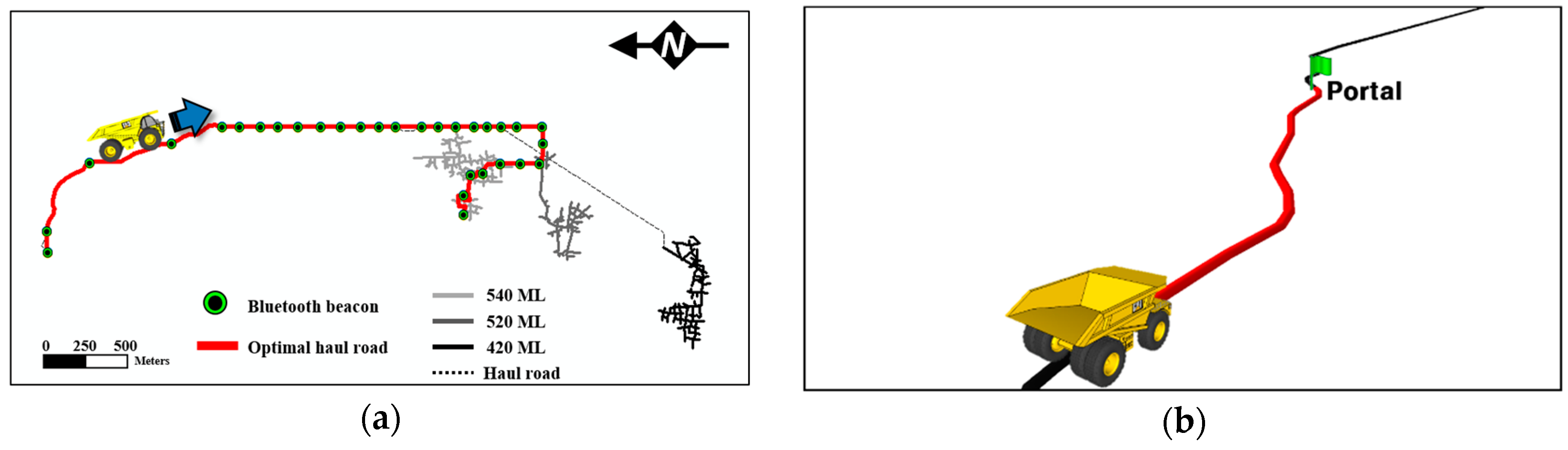
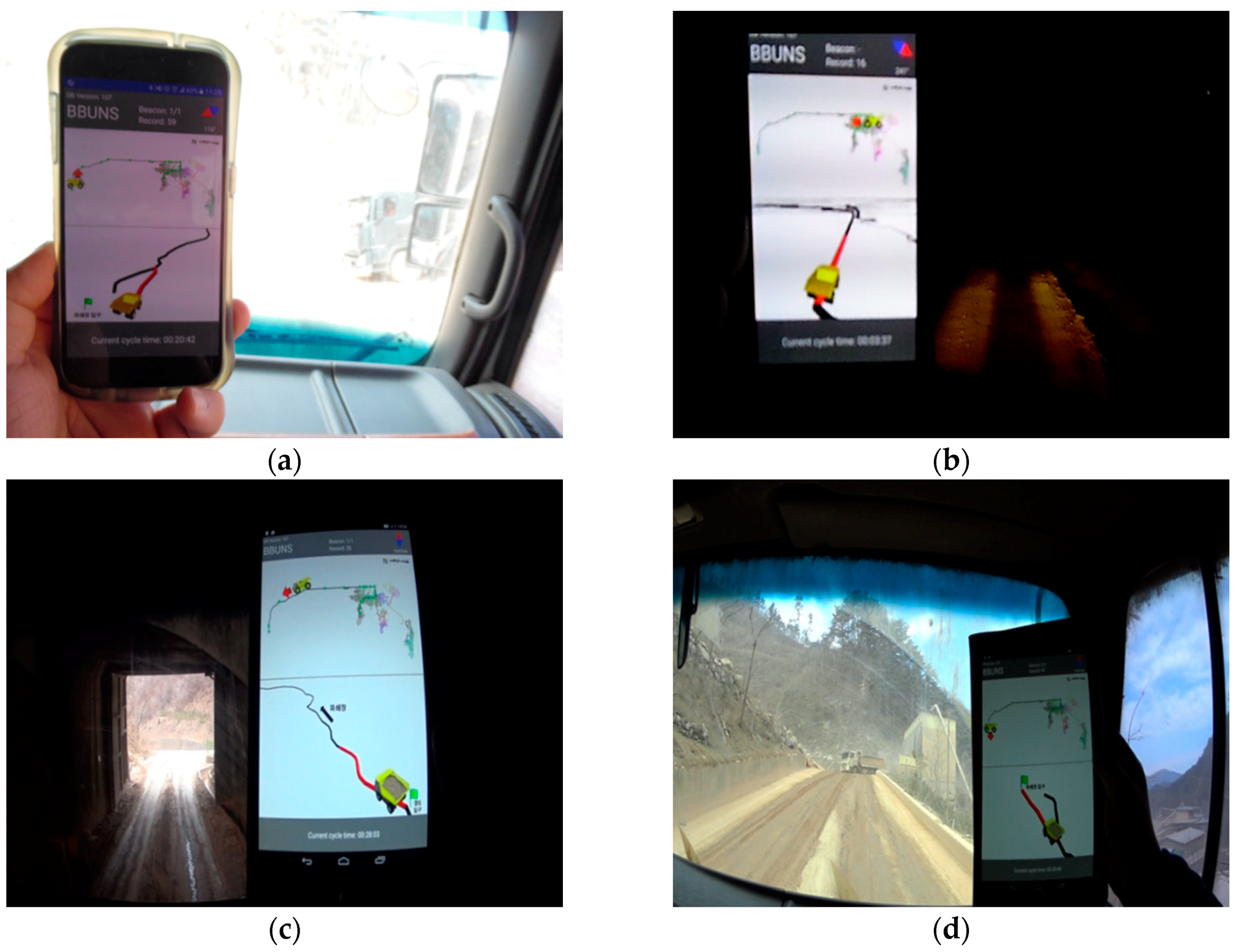
2.2.3. Development of the Mobile Underground Mine Navigation Application
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Alarie, S.; Gamache, M. Overview of Solution Strategies Used in Truck Dispatching Systems for Open Pit Mines. Int. J. Surf. Min. Reclam. Environ. 2002, 16, 59–76. [Google Scholar] [CrossRef]
- Brazil, M.; Grossman, P.A.; Lee, D.H.; Rubinstein, J.H.; Thomas, D.A.; Wormald, N.C. Decline Design in Underground Mines Using Constrained Path Optimisation. Min. Technol. 2008, 117, 93–99. [Google Scholar] [CrossRef]
- Ta, C.H.; Kresta, J.V.; Forbes, J.F. A Stochastic Optimization Approach to Mine Truck Allocation. Int. J. Surf. Min. Reclam. Environ. 2006, 19, 162–175. [Google Scholar] [CrossRef]
- Nehring, M.; Topal, E.; Knights, P. Dynamic Short Term Production Scheduling and Machine Allocation in Underground Mining Using Mathematical Programming. Trans. Inst. Min. Metall. Sect. A 2010, 119, 212–220. [Google Scholar] [CrossRef]
- Dornetto, L.D. An Adaptive Control Scheme—Expert System—That Optimizes the Operation of a Proposed Underground Coal Mining System with Applications to Shortwall, Longwall and Room and Pillar Mining Systems. In Proceedings of the 1988 IEEE International Conference on Systems, Man and Cybernetics, Beijing, China, 8–12 August 1988; IEEE: New York, NY, USA, 1988; pp. 209–214. [Google Scholar]
- Vagenas, N. Dispatch Control of a Fleet of Remote-Controlled/Automatic Load-Haul-Dump Vehicles in Underground Mines. Int. J. Prod. Res. 1991, 29, 2347–2363. [Google Scholar] [CrossRef]
- Huang, Y.; Kumar, U. Optimising the Number of Load-Haul-Dump Machines in a Swedish Mine by Using Queuing Theory: A Case Study. Int. J. Surf. Min. Reclam. Environ. 1994, 8, 171–174. [Google Scholar] [CrossRef]
- Blackwell, G.H. Estimation of Large Open Pit Haulage Truck Requirements. CIM Bull. 1999, 92, 143–149. [Google Scholar]
- Tsomondo, C.M. A Flexible Underground Mining System with Active Dispatching Model-A Solution for the Next Millennium. In Proceedings of the APCOM’99: Computer Applications in Minerals Industries, Golden, CO, USA, 20–22 October 1999; Dagdelen, K., Ed.; Colorado School of Mines: Golden, CO, USA, 1999; pp. 463–473. [Google Scholar]
- Oraee, K.; Asi, B. Fuzzy Model for Truck Allocation in Surface Mines. In Proceedings of the 13th International Symposium on Mine Planning and Equipment Selection, Wroclaw, Poland, 1–3 September 2004; Taylor & Francis: Oxfordshire, UK, 2004; pp. 585–593. [Google Scholar]
- Saayman, P.; Craig, I.K. Optimisation of an Autonomous Vehicle Dispatch System in an Underground Mine. J. S. Afr. Inst. Min. Metall. 2006, 106, 77–86. [Google Scholar]
- Yan, S.; Lai, W. An Optimal Scheduling Model for Ready Mixed Concrete Supply with Overtime Considerations. Autom. Constr. 2007, 16, 734–744. [Google Scholar] [CrossRef]
- Ercelebi, S.G.; Bascetin, A. Optimization of Shovel-Truck System for Surface Mining. J. S. Afr. Inst. Min. Metall. 2009, 109, 433–439. [Google Scholar]
- Choi, Y.; Nieto, A. Software for Simulating Open-Pit Truck/Shovel Haulage Systems Using Google Earth and GPSS/H. J. Korean Soc. Geosyst. Eng. 2011, 48, 734–743. [Google Scholar]
- Vasquez, O.C.; Sepúlveda, J.M.; Córdova, F. Modeling and Optimization of Vehicle Operations in Underground Copper Mining. Rem Rev. Esc. Minas 2011, 64, 365–371. [Google Scholar] [CrossRef]
- Salama, A.; Greberg, J. Optimization of Truck-Loader Haulage System in an Underground Mine: A Simulation Approach Using SimMine. In Proceedings of the MassMin 2012: 6th International Conference & Exhibition on Mass Mining, Sudbury, ON, Canada, 10–14 June 2012; Canadian Institute of Mining, Metallurgy and Petroleum: Sudbury, ON, Canada, 2012. [Google Scholar]
- Park, S.; Lee, S.; Choi, Y.; Park, H.S. Development of a Windows-Based Simulation Program for Selecting Equipment in Open-Pit Shovel-Truck Haulage Systems. Tunn. Undergr. Space 2014, 24, 111–119. [Google Scholar] [CrossRef]
- Chaowasakoo, P.; Seppäläb, H.; Koivo, H.; Zhou, Q. Improving Fleet Management in Mines: The Benefit of Heterogeneous Match Factor. Eur. J. Oper. Res. 2017, 261, 1052–1065. [Google Scholar] [CrossRef]
- Kim, C.W.; Tanchoco, J.M.A. Conflict-Free Shortest-Time Bidirectional AGV Routeing. Int. J. Prod. Res. 1991, 29, 2377–2391. [Google Scholar] [CrossRef]
- Gamache, M.; Grimard, R.; Cohen, P. A Shortest-Path Algorithm for Solving the Fleet Management Problem in Underground Mines. Eur. J. Oper. Res. 2005, 166, 497–506. [Google Scholar] [CrossRef]
- Beaulieu, M.; Gamache, M. An Enumeration Algorithm for Solving the Fleet Management Problem in Underground Mines. Comput. Oper. Res. 2006, 33, 1606–1624. [Google Scholar] [CrossRef]
- Choi, Y.; Park, H.; Sunwoo, C.; Clarke, K.C. Multi-Criteria Evaluation and Least-Cost Path Analysis for Optimal Haulage Routing of Dump Trucks in Large Scale Open-Pit Mines. Int. J. Geogr. Inf. Sci. 2009, 23, 1541–1567. [Google Scholar] [CrossRef]
- Sun, E.; Nieto, A.; Li, Z. GPS and Google Earth Based on 3D Assisted Driving System for Trucks in Surface Mines. Min. Sci. Technol. 2010, 20, 138–142. [Google Scholar] [CrossRef]
- Hexagon Mining’s Jtruck. Available online: http://hexagonmining.com/products/all-products/jtruck/ (accessed on 24 August 2017).
- Huang, X.; Zhu, W.; Lu, D. Underground Miners Localization System Based on ZigBee and WebGIS. In Proceedings of the 2010 18th International Conference on Geoinformatics, Beijing, China, 18–20 June 2010; IEEE: New York, NY, USA, 2010; pp. 1–5. [Google Scholar]
- Choi, Y.; Um, J.; Park, M. Finding Least-cost Paths across a Continuous Raster Surface with Discrete Vector Networks. Cartogr. Geogr. Inf. Sci. 2014, 41, 75–85. [Google Scholar] [CrossRef]
- Choi, Y.; Nieto, A. Optimal Haulage Routing of Off-Road Dump Trucks in Construction and Mining Sites Using Google Earth and a Modified Least-cost Path Algorithm. Autom. Constr. 2011, 20, 982–992. [Google Scholar] [CrossRef]
- Baek, J.; Choi, Y. A New Algorithm to Find Raster-based Least-cost Paths Using Cut and Fill Operations. Int. J. Geogr. Inf. Sci. 2017, 31, 2234–2254. [Google Scholar] [CrossRef]
- Baek, J.; Choi, Y. A New Method for Haul Road Design in Open-Pit Mines to Support Efficient Truck Haulage Operations. Appl. Sci. 2017, 7, 747. [Google Scholar] [CrossRef]
- Van Bemmelen, J.; Quak, W.; Van Hekken, M.; Van Oosterom, P. Vector vs. Raster-based Algorithms for Cross Country Movement Planning. In Proceedings of the Auto Carto 11, Minneapolis, MN, USA, 30 October–1 November 1993; American Congress on Surveying and Mapping and the American Society for Photogrammetry and Remote Sensing: Bethesda, MD, USA, 1993; pp. 304–317. Available online: http://www.gdmc.nl/oosterom/autoca11.pdf (accessed on 24 August 2017).
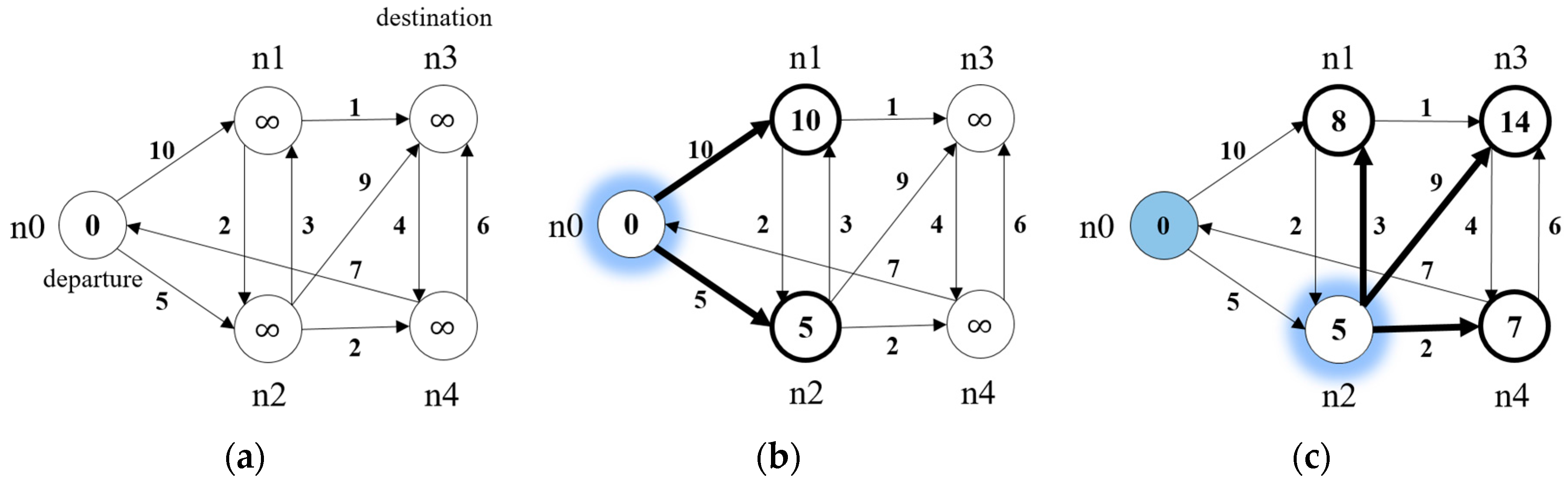
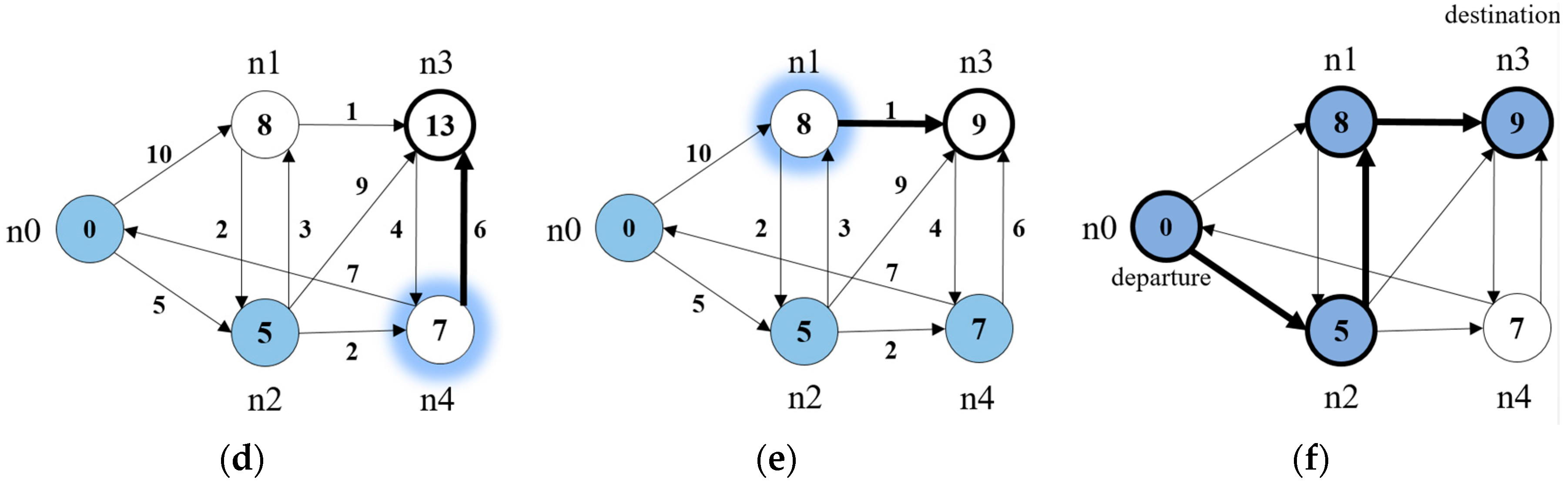
- Dijkstra, E.W. A Note on Two Problems in Connexion with Graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Antikainen, H. Comparison of Difference Strategies for Determining Raster-Based Least-Cost Paths with a Minimum Amount of Distortion. Trans. GIS 2013, 17, 96–108. [Google Scholar] [CrossRef]
- Park, B.; Choi, Y.; Park, H. Creation of Vector Network Data with Considering Terrain Gradient for Analyzing Optimal Haulage Routes of Dump Trucks in Open Pit Mines. Tunn. Undergr. Space 2013, 23, 353–361. [Google Scholar] [CrossRef]
- Park, B.; Park, S.; Choi, Y.; Park, H. Calculation of a Diesel Vehicle’s Carbon Dioxide Emissions during Haulage Operations in an Underground Mine using GIS. Tunn. Undergr. Space 2015, 25, 373–382. [Google Scholar] [CrossRef]
- Zhang, L.; Li, X.; Chen, L.; Yu, S.; Xiao, N. Localization System of Underground Mine Trackless Facilities Based on Wireless Sensor Networks. In Proceedings of the 2008 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 5–8 August 2008; IEEE: New York, NY, USA, 2008; pp. 347–351. [Google Scholar]
- Liu, Z.; Li, C.; Wu, D.; Dai, W.; Geng, S.; Ding, Q. A Wireless Sensor Network Based Personnel Positioning Scheme in Coal Mines with Blind Areas. Sensors 2010, 10, 9891–9918. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Li, L.; Zhang, Y. Research and Design of Location Tracking System Used in Underground Mine Based on WiFi Technology. In Proceedings of the 2009 International Forum on Computer Science Technology and Applications, Chongqing, China, 25–27 December 2009; IEEE: New York, NY, USA, 2009; pp. 417–419. [Google Scholar]
- Tao, P.; Xiaoyang, L. Hybrid Wireless Communication System Using ZigBee and WiFi Technology in the Coalmine Tunnels. In Proceedings of the 2011 Third International Conference on Measuring Technology and Mechatronics Automation, Shanghai, China, 6–7 January 2011; IEEE: New York, NY, USA, 2011; pp. 340–343. [Google Scholar]
- Moridi, M.A.; Kawamura, Y.; Sharifzadeh, M.; Chanda, E.K.; Jang, H. An Investigation of Underground Monitoring and Communication System Based on Radio Waves Attenuation Using ZigBee. Tunn. Undergr. Space Technol. 2014, 43, 362–369. [Google Scholar] [CrossRef]
- Bandyopadhyay, L.K.; Chaulya, S.K.; Mishra, P.K.; Choure, A.; Baveja, B.M. Wireless Information and Safety System for Mines. J. Sci. Ind. Res. 2009, 68, 107–117. [Google Scholar]
- Errington, A.F.C.; Daku, B.L.F.; Prugger, A.F. Initial Position Estimation Using RFID Tags: A Least-Squares Approach. IEEE Trans. Instrum. Meas. 2010, 59, 2863–2869. [Google Scholar] [CrossRef]
- Jung, J.; Choi, Y. Analysis of Tag Recognition Ranges and Rates According to Reader Transmission Power Levels When Tracking Machines by RFID in Underground Mines: An Indoor Experiment. Geosyst. Eng. 2017, 20, 81–87. [Google Scholar] [CrossRef]
- Minetec’s Trax™. Available online: http://minetec.com.au/ (accessed on 24 August 2017).
- Modular Mining Systems’ DISPATCH. Available online: http://www.modularmining.com/product/dispatch-underground/ (accessed on 24 August 2017).
- Mine Site Technologies’ Asset Tracking System. Available online: http://mstglobal.com/solutions/asset-people-tracking/underground-hard-rock/ (accessed on 24 August 2017).
- MISOM Technologies’ FARA (Field Analysis & Reporting Application). Available online: http://misom.com/applications/fara/ (accessed on 24 August 2017).
- Jung, J.; Choi, Y. Measuring Transport Time of Mine Equipment in and Underground Mine Using a Bluetooth Beacon System. Minerals 2017, 7, 1. [Google Scholar] [CrossRef]
- Kajioka, S.; Mori, T.; Uchiya, T.; Takumi, I.; Matsuo, H. Experiment of Indoor Position Presumption Based on RSSI of Bluetooth LE Beacon. In Proceedings of the 2014 IEEE 3rd Global Conference on Consumer Electronics (GCCE), Tokyo, Japan, 7–10 October 2014; IEEE: New York, NY, USA, 2014; pp. 337–339. [Google Scholar]
- Yu, B.; Xu, L.; Li, Y. Bluetooth Low Energy (BLE) Based Mobile Electrocardiogram Monitoring System. In Proceedings of the 2012 IEEE International Conference on Information and Automation, Shenyang, China, 6–8 June 2012; IEEE: New York, NY, USA, 2012; pp. 763–767. [Google Scholar]
- Baek, J.; Choi, Y.; Lee, C.; Jung, J. Performance Comparison of Bluetooth Beacon and Reverse RFID Systems as Potential Tools for Measuring Truck Travel Time in Open-pit Mines: A Simulation Experiment. Geosyst. Eng. 2017. [Google Scholar] [CrossRef]
- Maptek’s MineSuite Fleet Management System. Available online: http://www.maptek.com/partners/minesuite/index.html/ (accessed on 24 August 2017).
- Huang, B.; Wu, Q.; Zhan, F.B. A Shortest Path Algorithm with Novel Heuristics for Dynamic Transportation Networks. Int. J. Geogr. Inf. Sci. 2007, 21, 625–644. [Google Scholar] [CrossRef]
- Jung, J.; Baek, J.; Choi, Y. Analysis of Features and Applications of Bluetooth Beacon Technology for Utilization in the Mining and Construction Industries. Tunn. Undergr. Space 2016, 6, 143–153. [Google Scholar] [CrossRef]
- RECO Beacon. Available online: http://reco2.me/ (accessed on 24 August 2017).
- Hexagon Mining’s Jigsaw Operations Suite. Available online: http://hexagonmining.com/products/operations-suite/fleet-management/ (accessed on 24 August 2017).
- Caterpillar’s MineStar. Available online: http://www.cat.com/en_US/campaigns/awareness/cat-minestar-command.html/ (accessed on 24 August 2017).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Haul Road | Length (m) | Approximate Speed (km/h) | Travel Time (min) | ||
|---|---|---|---|---|---|
| Empty | Loaded | Route 1—Crushing Plant to Workplace | Route 2—Workplace to Crushing Plant | ||
| H | 50 | 20 | 15 | 0.15 | 0.2 |
| A | 50 | 20 | 15 | 0.15 | 0.2 |
| D | 50 | 10 | 5 | 0.3 | 0.6 |
| R | 50 | 10 | 5 | 0.3 | 0.6 |
| L | Variable | 15 | 15 | Variable | Variable |
| Properties | |
|---|---|
| Dimensions | 45 mm 20 mm (Diameter Height) |
| Weight | 11.6 g (0.4 oz) |
| Processor | 32-bit ARM® Cortex®-M0 (ARM Holdings, Cambridge, UK) |
| Chipset | Nordic nrf51822 (Nordic Semiconductor, Oslo, Norway) |
| Battery | CR2450 Lithium Coin Battery (3 V, 620 mAh, Panasonic, Osaka, Japan) |
| Casing | Acrylonitrile Butadiene Styrene (ABS) Plastic |
| Thermal Resistance | 93 °C (200 °F) |
| Operating Temperature | −10–60 °C (14–140 °F) |
| Tx Power | −16–4 dbm |
| Signal range | 1–70 m |
| Model | Galaxy S5 (SM-G900) | Galaxy S6 (SM-G920) | Galaxy S7 (SM-G930) | Lenovo TAB (S850F) | |
|---|---|---|---|---|---|
| Properties | |||||
| Operating system | Android 6.0 (Google, Menlo Park, CA, USA) | Android 7.0 (Google, Menlo Park, CA, USA) | Android 7.0 (Google, Menlo Park, CA, USA) | Android 4.4.2 (Google, Menlo Park, CA, USA) | |
| Android processor | Qualcomm Snapdragon 801 (Qualcomm, San Diego, CA, USA) | Exynos 7420 Octa (Samsung Electronics, Suwon, Korea) | Exynos 8890 Octa (Samsung Electronics, Suwon, Korea) | Intel Atom Z3745 (Intel, Santa Clara, CA, USA) | |
| Bluetooth | Bluetooth 4.0 | Bluetooth 4.1 | Bluetooth 4.2 | Bluetooth 4.0 | |
| RAM | 2 GB | 3 GB | 4 GB | 2 GB | |
| Battery | 2800 mAh | 2550 mAh | 3000 mAh | 4290 mAh | |
| Route 1—Crushing Plant to Workplace | Route 2—Workplace to Crushing Plant | ||||
|---|---|---|---|---|---|
| Beacon Minor ID | Location | Measured Time | Beacon Minor ID | Location | Measured Time |
| 2 | C | 09:21:54 a.m. | 30 | W | 09:43:52 a.m. |
| 3 | H | 09:26:29 a.m. | 28 | L | 09:46:01 a.m. |
| 4 | H | 09:28:16 a.m. | 26 | D | 09:46:52 a.m. |
| 5 | P | 09:30:19 a.m. | 24 | D | 09:47:42 a.m. |
| 10 | A | 09:33:36 a.m. | 22 | A | 09:48:56 a.m. |
| 14 | A | 09:34:33 a.m. | 18 | A | 09:50:59 a.m. |
| 18 | A | 09:35:34 a.m. | 14 | A | 09:52:54 a.m. |
| 22 | A | 09:36:38 a.m. | 10 | A | 09:54:33 a.m. |
| 24 | D | 09:37:16 a.m. | 5 | P | 09:57:04 a.m. |
| 26 | D | 09:37:53 a.m. | 4 | H | 09:58:20 a.m. |
| 28 | L | 09:38:31 a.m. | 3 | H | 10:00:18 a.m. |
| 30 | W | 09:39:44 a.m. | 2 | C | 10:02:46 a.m. |
| Total travel time | 00:40:52 | ||||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baek, J.; Choi, Y.; Lee, C.; Suh, J.; Lee, S. BBUNS: Bluetooth Beacon-Based Underground Navigation System to Support Mine Haulage Operations. Minerals 2017, 7, 228. https://doi.org/10.3390/min7110228
Baek J, Choi Y, Lee C, Suh J, Lee S. BBUNS: Bluetooth Beacon-Based Underground Navigation System to Support Mine Haulage Operations. Minerals. 2017; 7(11):228. https://doi.org/10.3390/min7110228
Chicago/Turabian StyleBaek, Jieun, Yosoon Choi, Chaeyoung Lee, Jangwon Suh, and Sangho Lee. 2017. "BBUNS: Bluetooth Beacon-Based Underground Navigation System to Support Mine Haulage Operations" Minerals 7, no. 11: 228. https://doi.org/10.3390/min7110228
APA StyleBaek, J., Choi, Y., Lee, C., Suh, J., & Lee, S. (2017). BBUNS: Bluetooth Beacon-Based Underground Navigation System to Support Mine Haulage Operations. Minerals, 7(11), 228. https://doi.org/10.3390/min7110228