
Hopf Bifurcation Analysis of a Diffusive Nutrient–Phytoplankton Model with Time Delay



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Stability Analysis
2.1. Non-Delay Model
- (1)
- If , then the equilibrium is locally asymptotically stable.
- (2)
- If , then the equilibrium is locally asymptotically stable.
- (3)
- If , and there is no such that , then the equilibrium is locally asymptotically stable.
- (4)
- If , and there is a such that , then the equilibrium is Turing unstable.
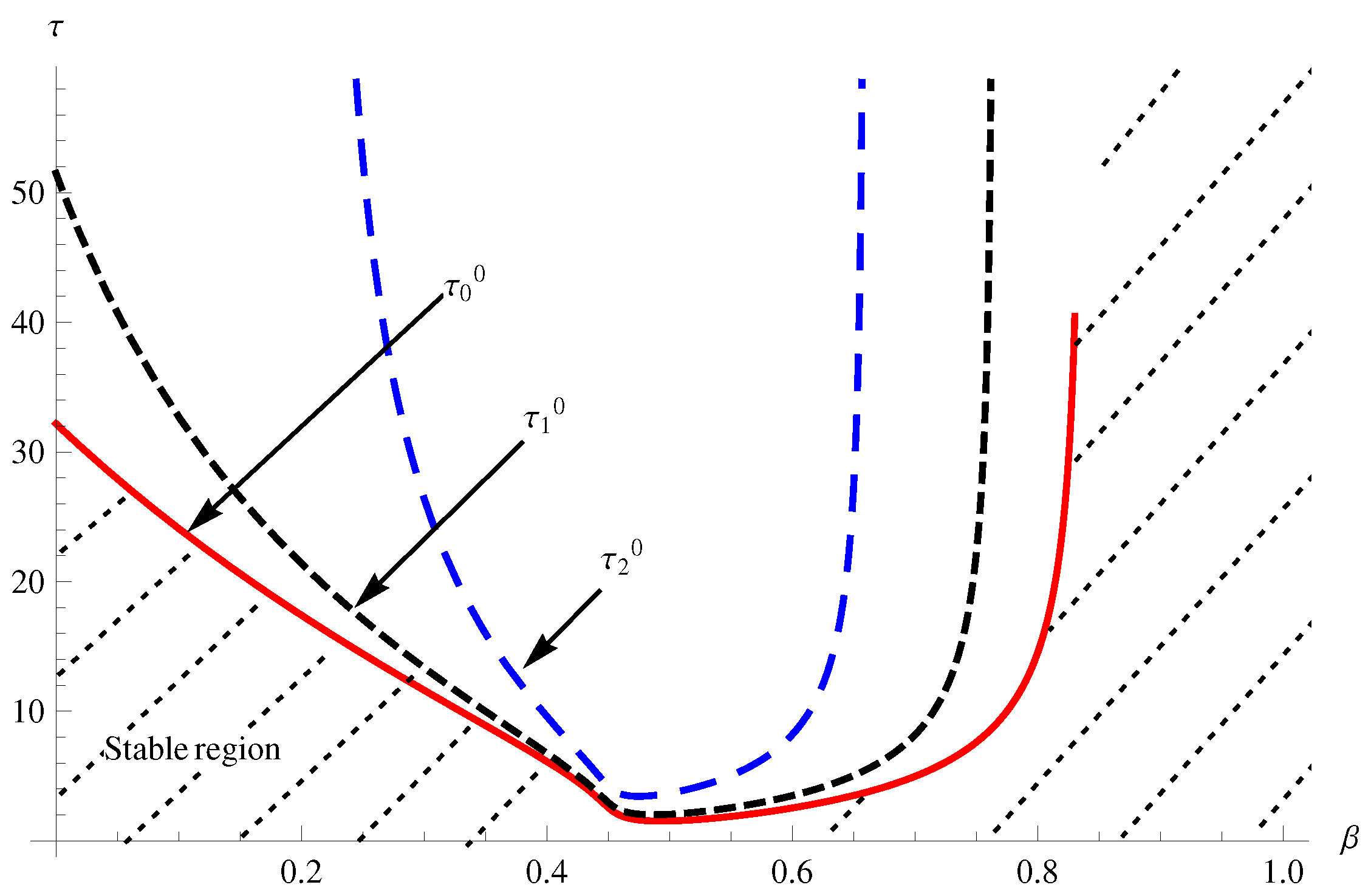
2.2. Delay Model
3. Property of Hopf Bifurcation
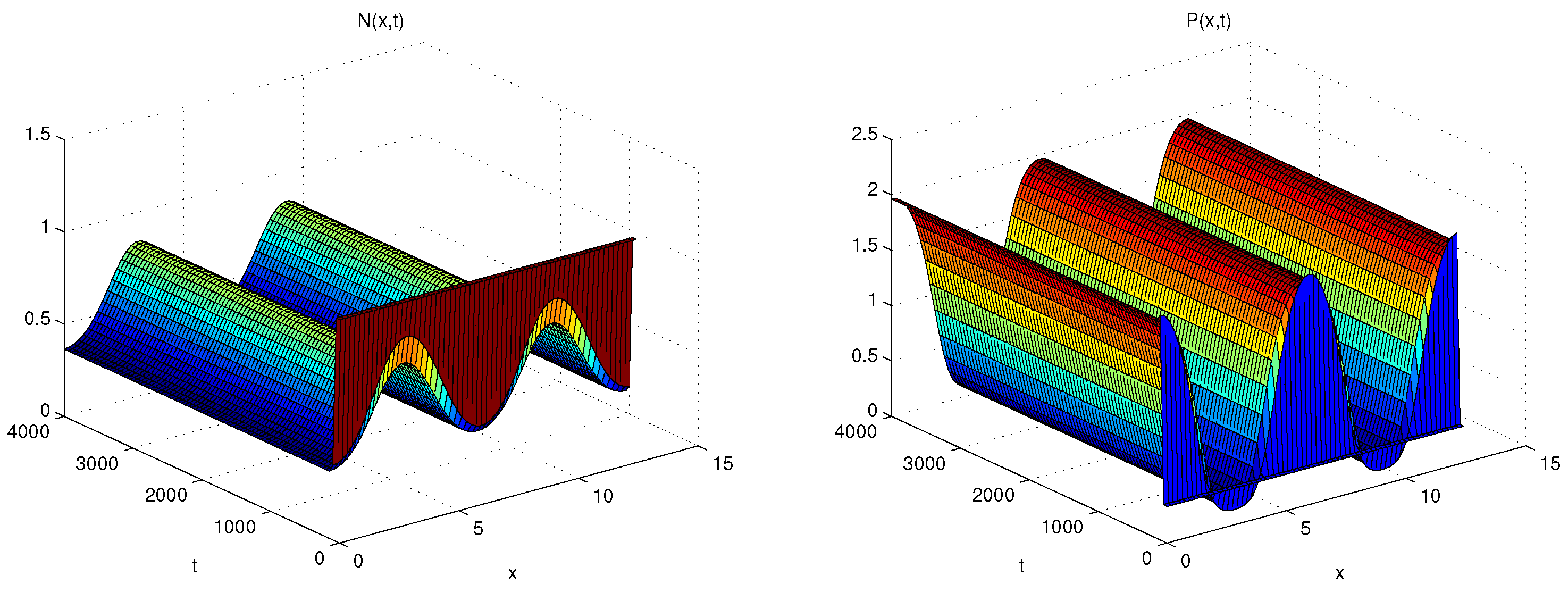
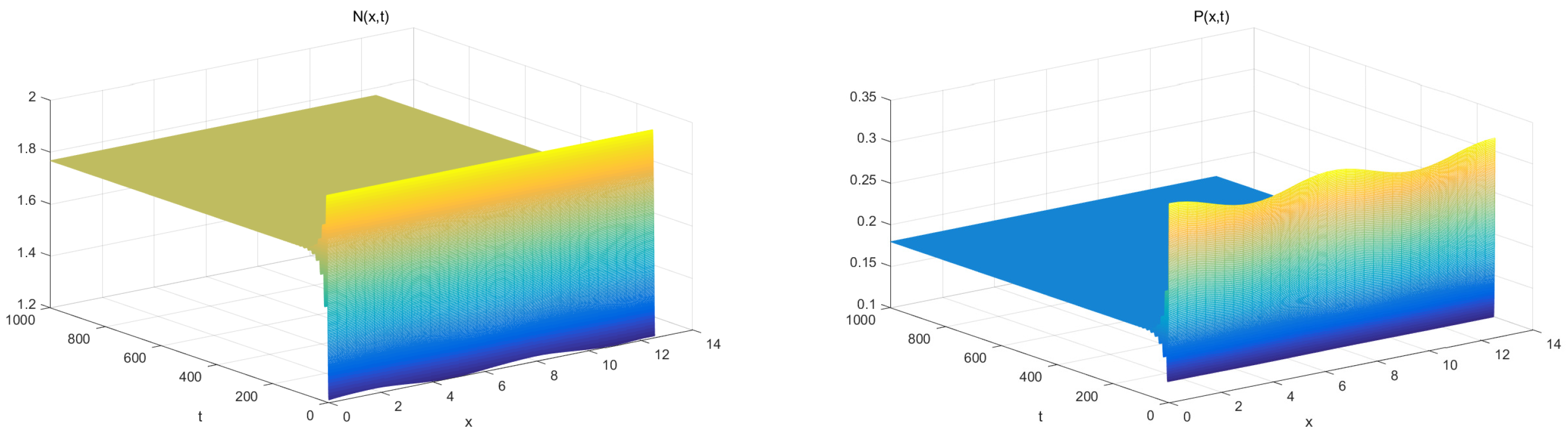
4. Numerical Simulations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Luo, J. Phytoplankton-zooplankton dynamics in periodic environments taking into account eutrophication. Math. Biosci. 2013, 245, 126–136. [Google Scholar] [CrossRef] [PubMed]
- Dai, C.; Zhao, M. Nonlinear Analysis in a Nutrient-Algae-Zooplankton System with Sinking of Algae. Abstr. Appl. Anal. 2014, 2014, 278457. [Google Scholar] [CrossRef]
- Rehim, M.; Wu, W.; Muhammadhaji, A. On the Dynamical Behavior of Toxic-Phytoplankton-Zooplankton Model with Delay. Discret. Dyn. Nat. Soc. 2015, 2015, 756315. [Google Scholar] [CrossRef] [Green Version]
- Chakraborty, K.; Jana, S.; Kar, T.K. Global dynamics and bifurcation in a stage structured prey-predator fishery model with harvesting. Appl. Math. Comput. 2012, 218, 9271–9290. [Google Scholar] [CrossRef]
- Rehim, M.; Imran, M. Dynamical analysis of a delay model of phytoplankton-zooplankton interaction. Appl. Math. Model. 2012, 36, 638–647. [Google Scholar] [CrossRef]
- Chakrabarti, S. Eutrophication global aquatic environmental problem: A review. Res. Rev. J. Ecol. Environ. Sci. 2018, 6, 1–6. [Google Scholar]
- Sharma, A.K.; Sharma, A.; Agnihotri, K. Bifurcation behaviors analysis of a plankton model with multiple delays. Int. J. Biomath. 2016, 9, 1650086. [Google Scholar] [CrossRef]
- Rehim, M.; Zhang, Z.; Muhammadhaji, A. Mathematical analysis of a nutrient-plankton system with delay. SpringerPlus 2016, 5, 1–22. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Meng, X.Y.; Wang, J.G.; Huo, H.F. Dynamical Behaviour of a Nutrient-Plankton Model with Holling Type IV, Delay, and Harvesting. Discret. Dyn. Nat. Soc. 2018, 2018, 9232590. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Jiang, W. Bifurcations in a delayed differential-algebraic plankton economic system. J. Appl. Anal. Comput. 2017, 7, 1431–1447. [Google Scholar] [CrossRef]
- Guo, Q.; Dai, C.; Yu, H.; Liu, H.; Sun, X.; Li, J.; Zhao, M. Stability and bifurcation analysis of a nutrient hytoplankton model with time delay. Math. Methods Appl. Sci. 2020, 43, 3018–3039. [Google Scholar] [CrossRef]
- Thakur, N.K.; Ojha, A.; Tiwari, P.K.; Upadhyay, R.K. An investigation of delay induced stability transition in nutrient-plankton systems. Chaos Solitons Fractals 2021, 142, 110474. [Google Scholar] [CrossRef]
- Huppert, A.; Blasius, B.; Stone, L. A Model of Phytoplankton Blooms. Am. Nat. 2002, 159, 156–171. [Google Scholar] [CrossRef] [PubMed]
- Roy, S. Do phytoplankton communities evolve through a self-regulatory abundance-diversity relationship? Biosystems 2009, 95, 160–165. [Google Scholar] [CrossRef] [PubMed]
- Pal, S.; Chatterjee, S.; Chattopadhyay, J. Role of toxin and nutrient for the occurrence and termination of plankton bloom Results drawn from field observations and a mathematical model. Biosystems 2007, 90, 87–100. [Google Scholar] [CrossRef] [PubMed]
- Roy, S.; Alam, S.; Chattopadhyay, J. Competing Effects of Toxin-Producing Phytoplankton on Overall Plankton Populations in the Bay of Bengal. Bull. Math. Biol. 2006, 68, 2303. [Google Scholar] [CrossRef] [PubMed]
- Sarkar, R.R.; Chattopadhayay, J. Occurrence of planktonic blooms under environmental fluctuations and its possible control mechanism–mathematical models and experimental observations. J. Theor. Biol. 2003, 224, 501–516. [Google Scholar] [CrossRef]
- Chakraborty, S.; Chatterjee, S.; Venturino, E.; Chattopadhyay, J. Recurring Plankton Bloom Dynamics Modeled via Toxin-Producing Phytoplankton. J. Biol. Phys. 2007, 33, 271–290. [Google Scholar] [CrossRef] [Green Version]
- Wu, J. Theory and Applications of Partial Functional-Differential Equations; Springer: New York, NY, USA, 1996. [Google Scholar]
- Ruan, S.; Wei, J. On the zeros of transcendental functions with applications to stability of delay differential equations with two delays. Dyn. Contin. Discrete Impuls. Syst. Ser. A Math. Anal. 2003, 10, 863–874. [Google Scholar]
- Hassard, B.D.; Kazarinoff, N.D.; Wan, Y.H. Theory and Applications of Hopf Bifurcation; Cambridge University Press: Cambridge, UK, 1981. [Google Scholar]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, R.; Wang, L.; Jin, D. Hopf Bifurcation Analysis of a Diffusive Nutrient–Phytoplankton Model with Time Delay. Axioms 2022, 11, 56. https://doi.org/10.3390/axioms11020056
Yang R, Wang L, Jin D. Hopf Bifurcation Analysis of a Diffusive Nutrient–Phytoplankton Model with Time Delay. Axioms. 2022; 11(2):56. https://doi.org/10.3390/axioms11020056
Chicago/Turabian StyleYang, Ruizhi, Liye Wang, and Dan Jin. 2022. "Hopf Bifurcation Analysis of a Diffusive Nutrient–Phytoplankton Model with Time Delay" Axioms 11, no. 2: 56. https://doi.org/10.3390/axioms11020056
APA StyleYang, R., Wang, L., & Jin, D. (2022). Hopf Bifurcation Analysis of a Diffusive Nutrient–Phytoplankton Model with Time Delay. Axioms, 11(2), 56. https://doi.org/10.3390/axioms11020056