
Flow Modeling over Airfoils and Vertical Axis Wind Turbines Using Fourier Pseudo-Spectral Method and Coupled Immersed Boundary Method

Abstract
:1. Introduction
2. Mathematical Modeling
2.1. Mathematical Modeling of Fluid Flows
2.2. Fourier Pseudo-Spectral Method
2.3. Immersed Boundary Method
- Using Equation (16), we calculate the parameter temporary or Eulerian velocity field ;
- By the interpolation procedure presented by Equation (19), the information from the Eulerian domain, , is transmitted to the Lagrangian domain. Thus, is determined;
- is determined, that is, the velocity that the immersed boundary must have over the simulated physical time. This velocity is imposed or calculated by some additional mathematical model. For airfoils, . For vertical axis turbine blades, is calculated by Equations (25) and (26), described in Section 2.4;
- Using Equation (18), we calculate the Lagrangian force. In general, this step is about the application of Newton’s Second Law on the Lagrangian domain. The boundary condition of the immersed interface, given by , is now guaranteed in terms of the Lagrangian force;
- Using Equation (12), we propose the distribution of the Lagrangian force for the points of the Eulerian domain. The Eulerian force field is determined;
- The Eulerian velocity field is then corrected by the term , using Equation (20).
- Before advancing the time step, , where is the interaction of multiple direct imposition of force;
- It is interpolated to , using Equation (19);
- Obtained from interpolation, the new Lagrangian velocity is replaced in Equation (18). It is calculated as ;
- With the term , it is corrected to , and it is estimated as ,
- It is updated to , return to step (1) or advance in time, .
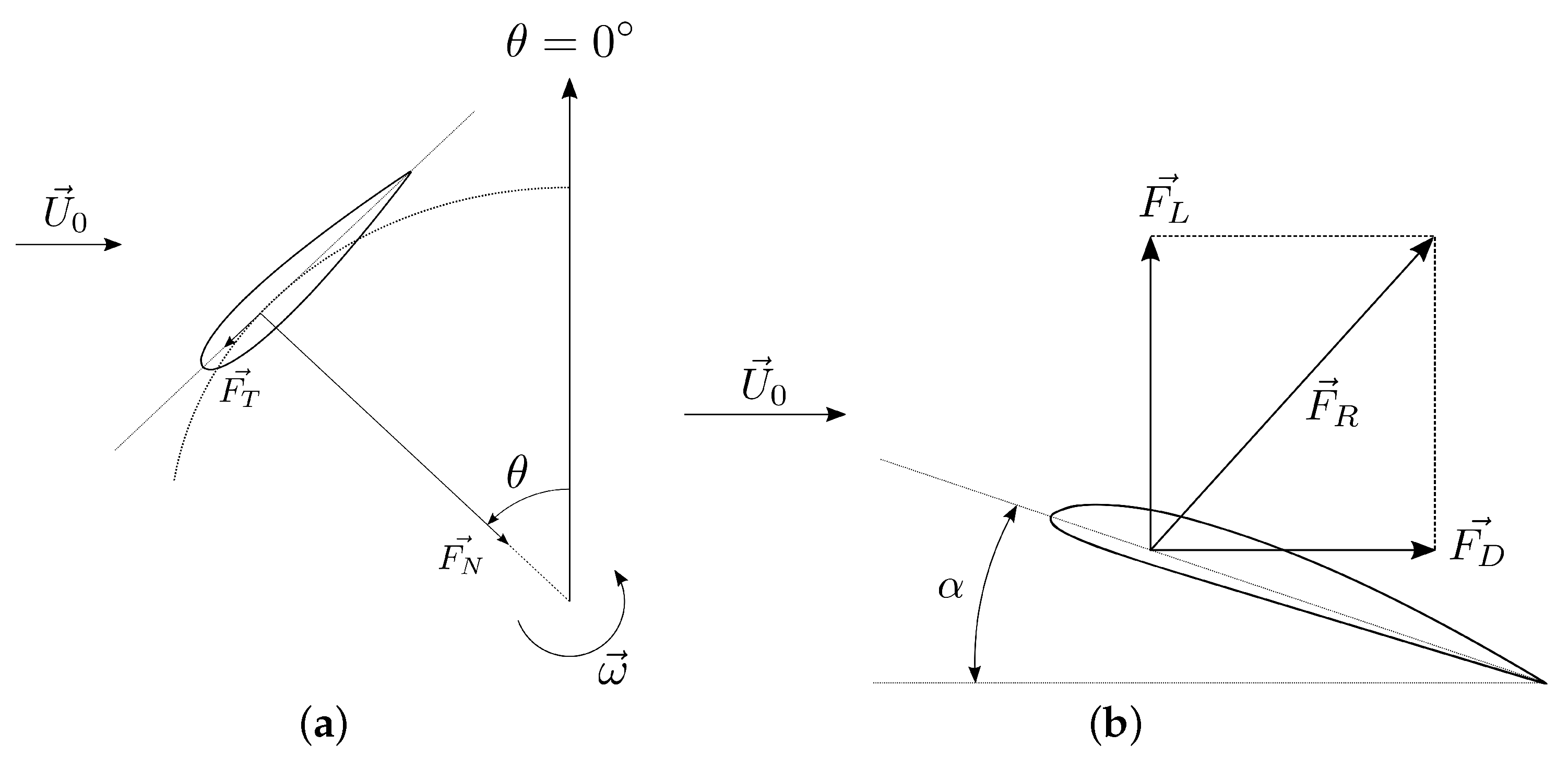
2.4. Mathematical Modeling of Rotary Motion
3. Numerical and Computational Modeling
4. Validation
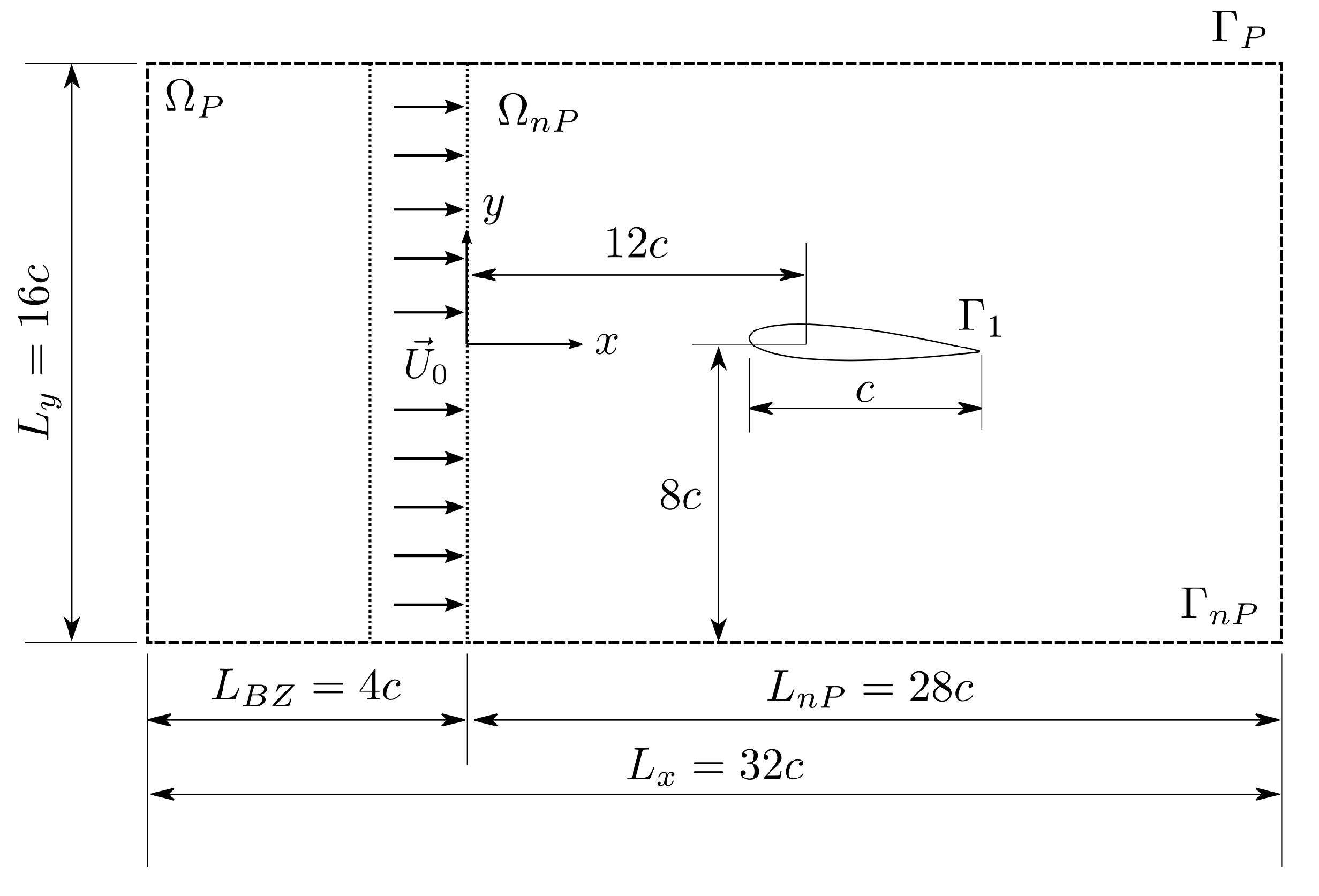
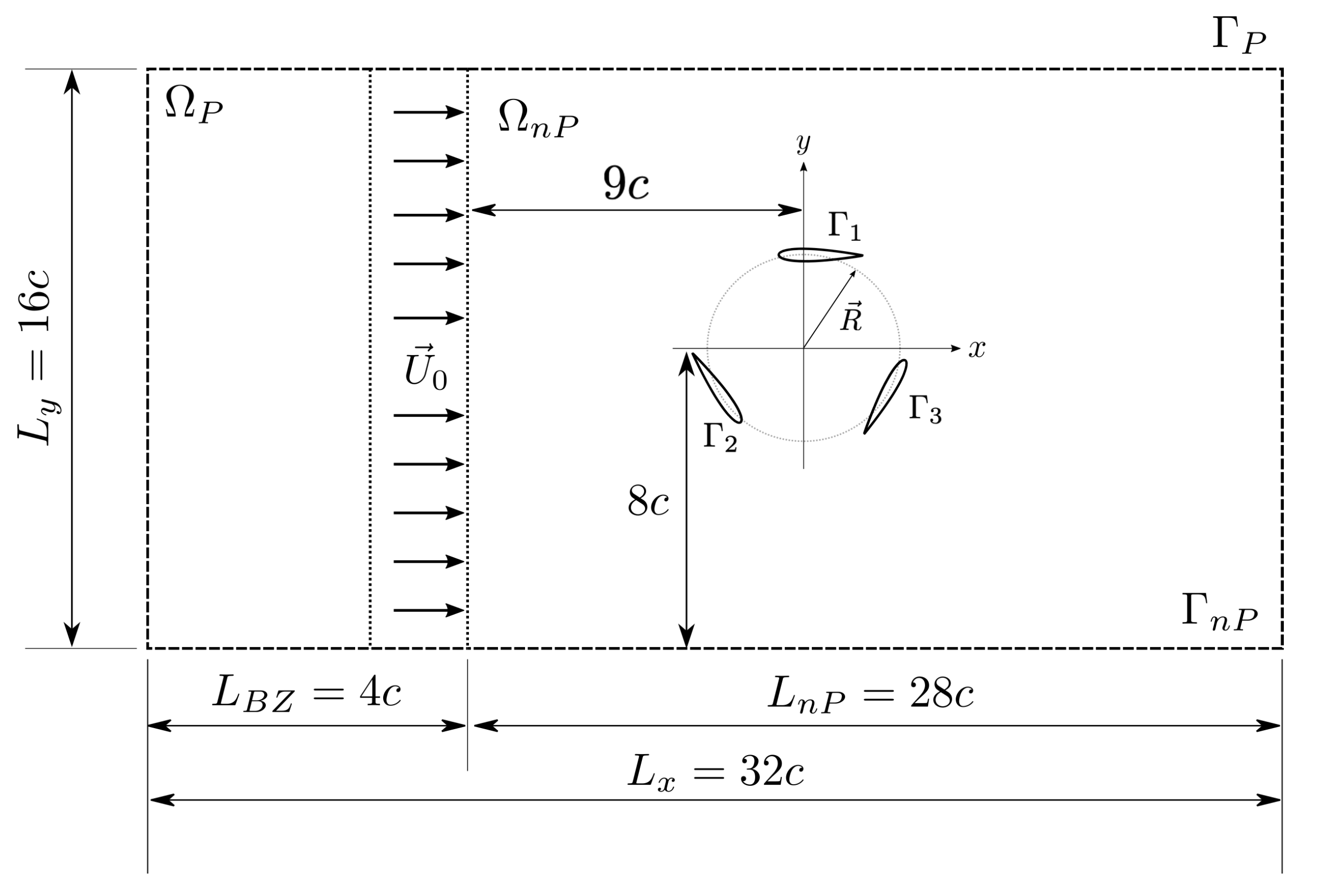
4.1. Calculation Domain
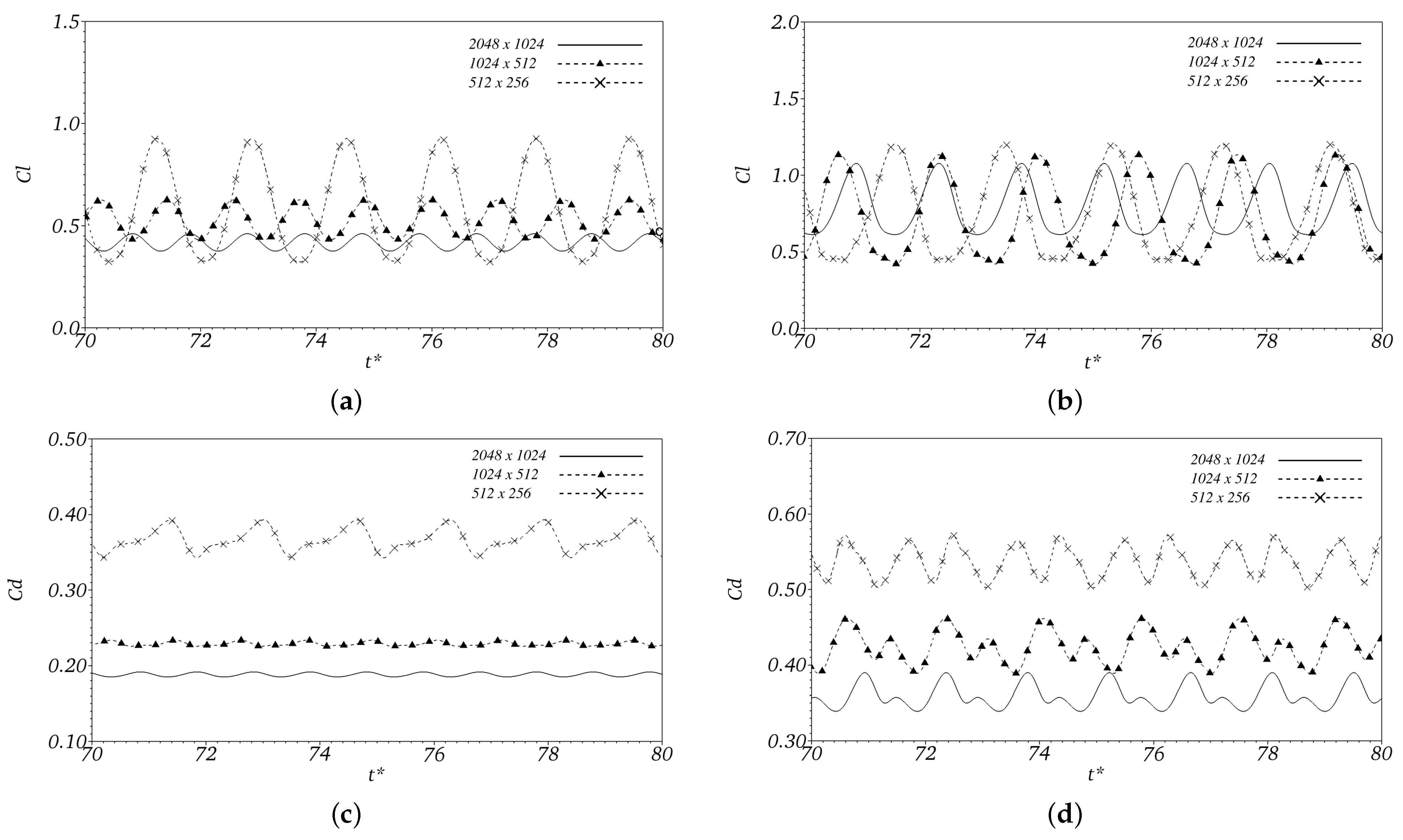
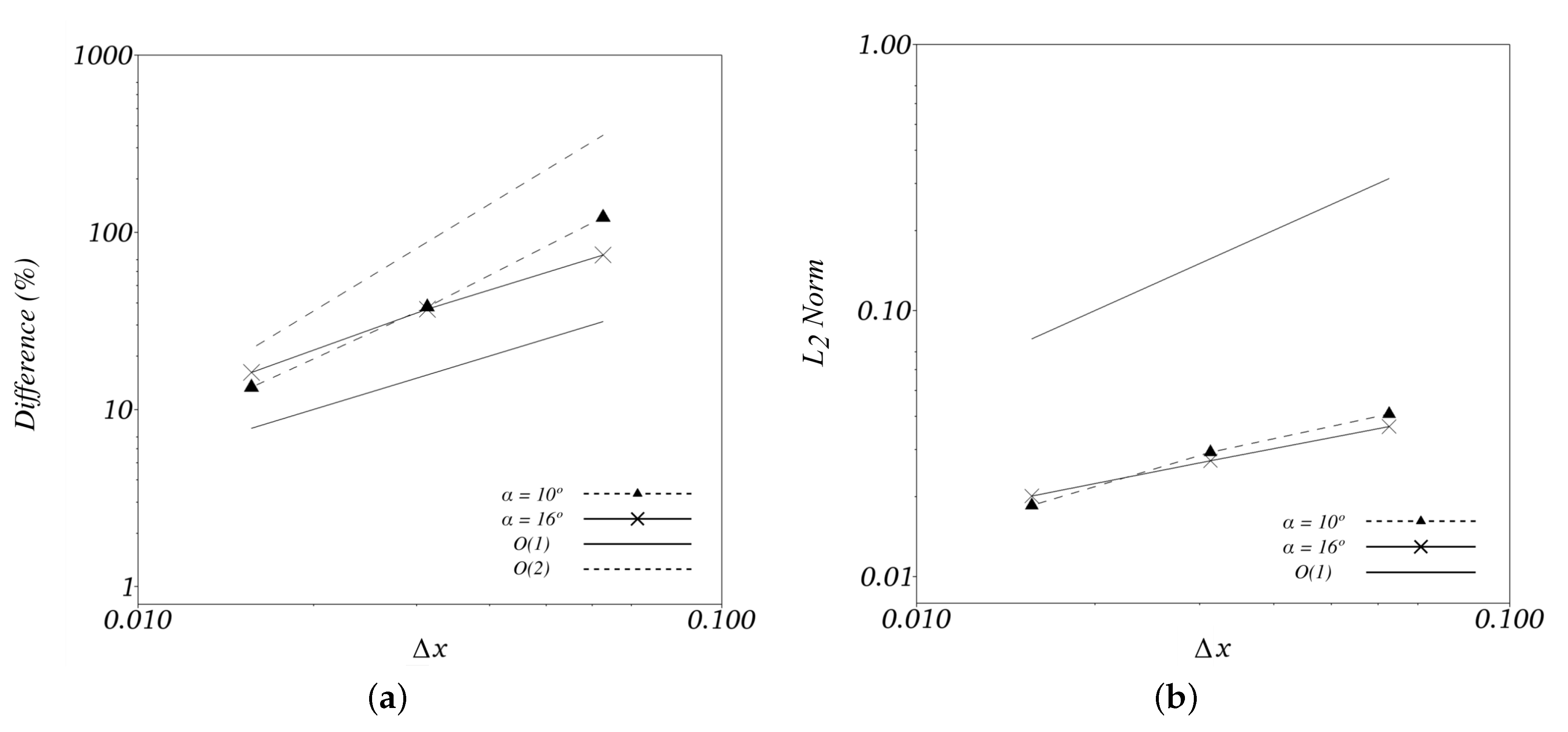
4.2. Eulerian Domain Refinement
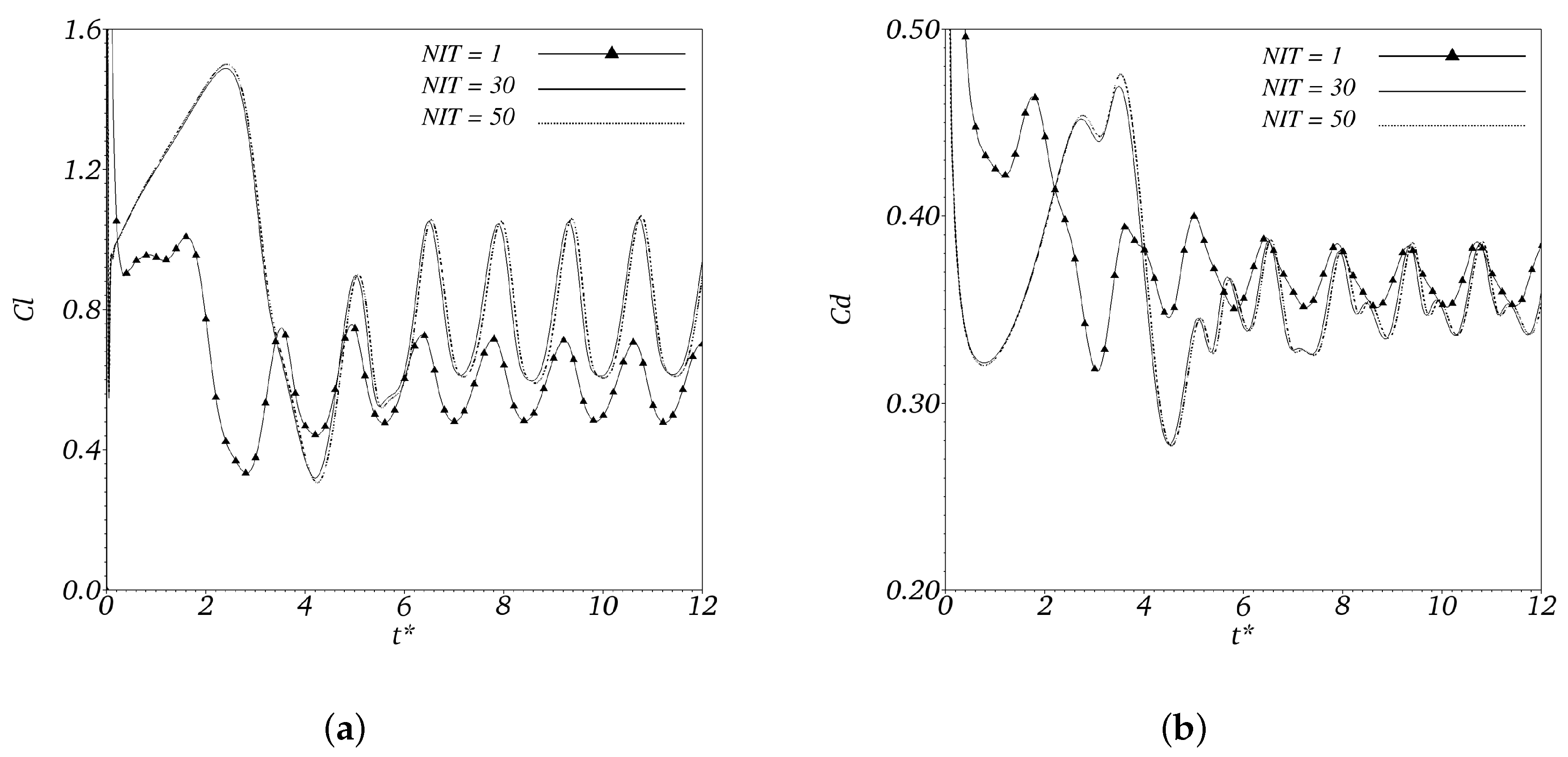
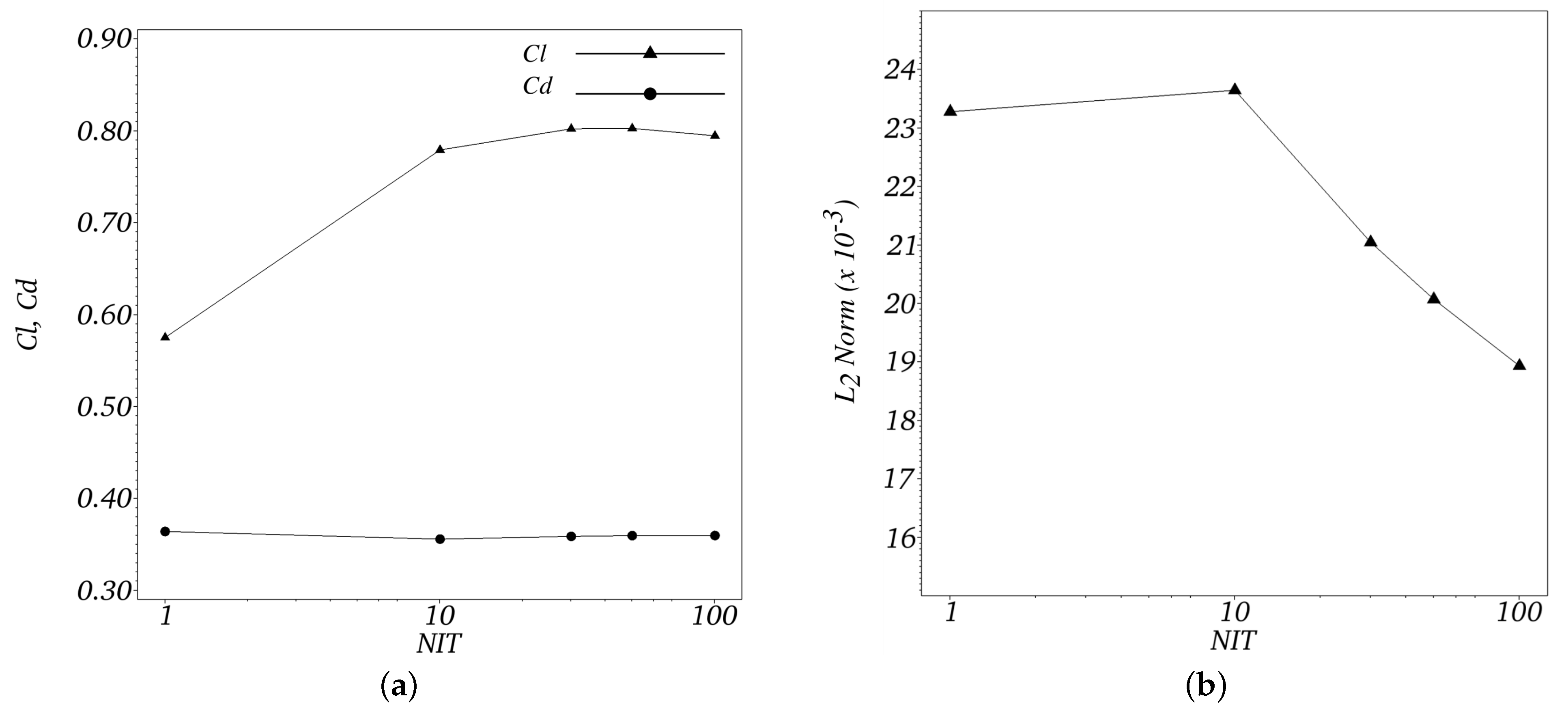
4.3. Influence of the Number of NIT Interactions of Multi-Direct Forcing
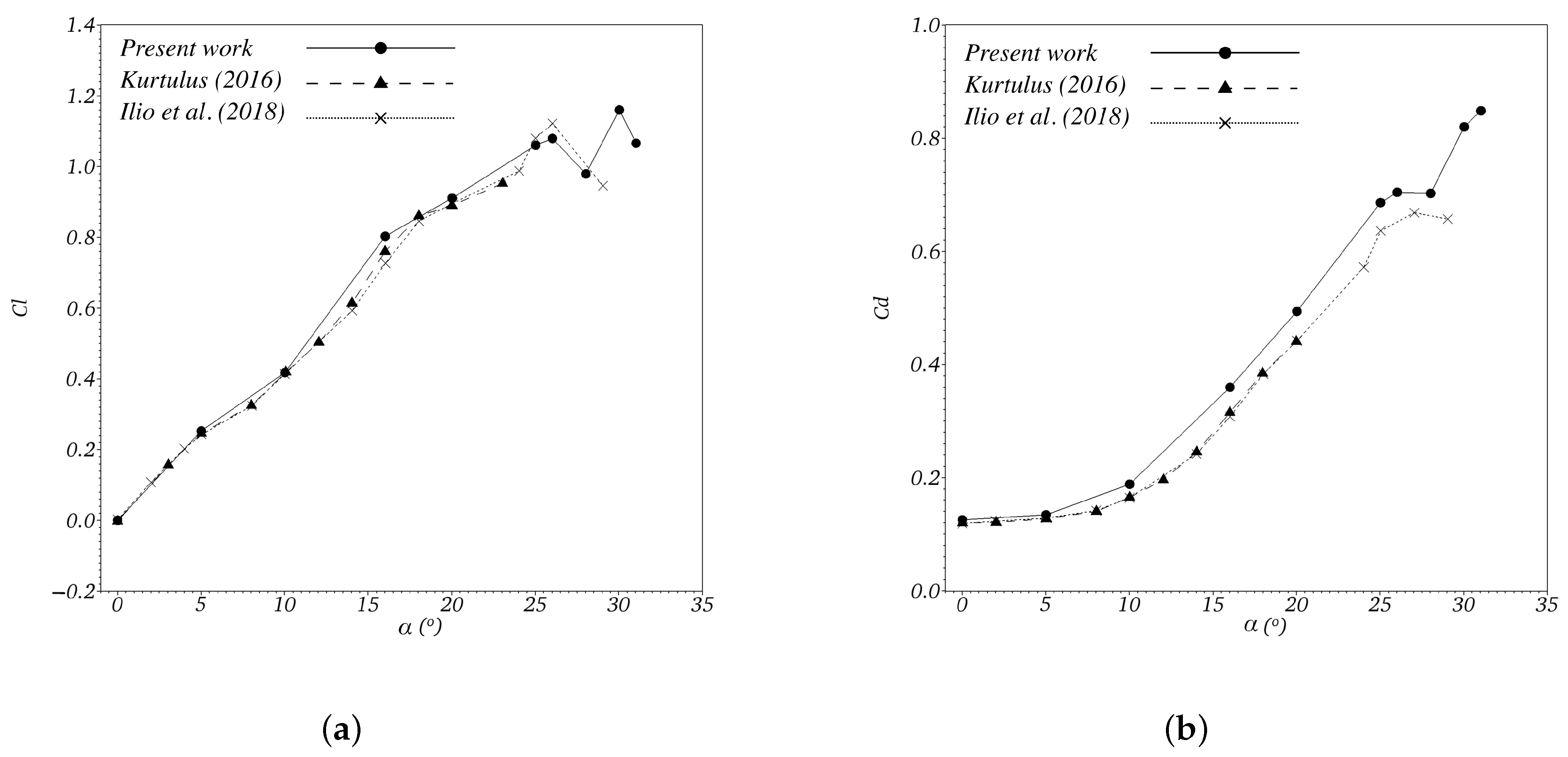
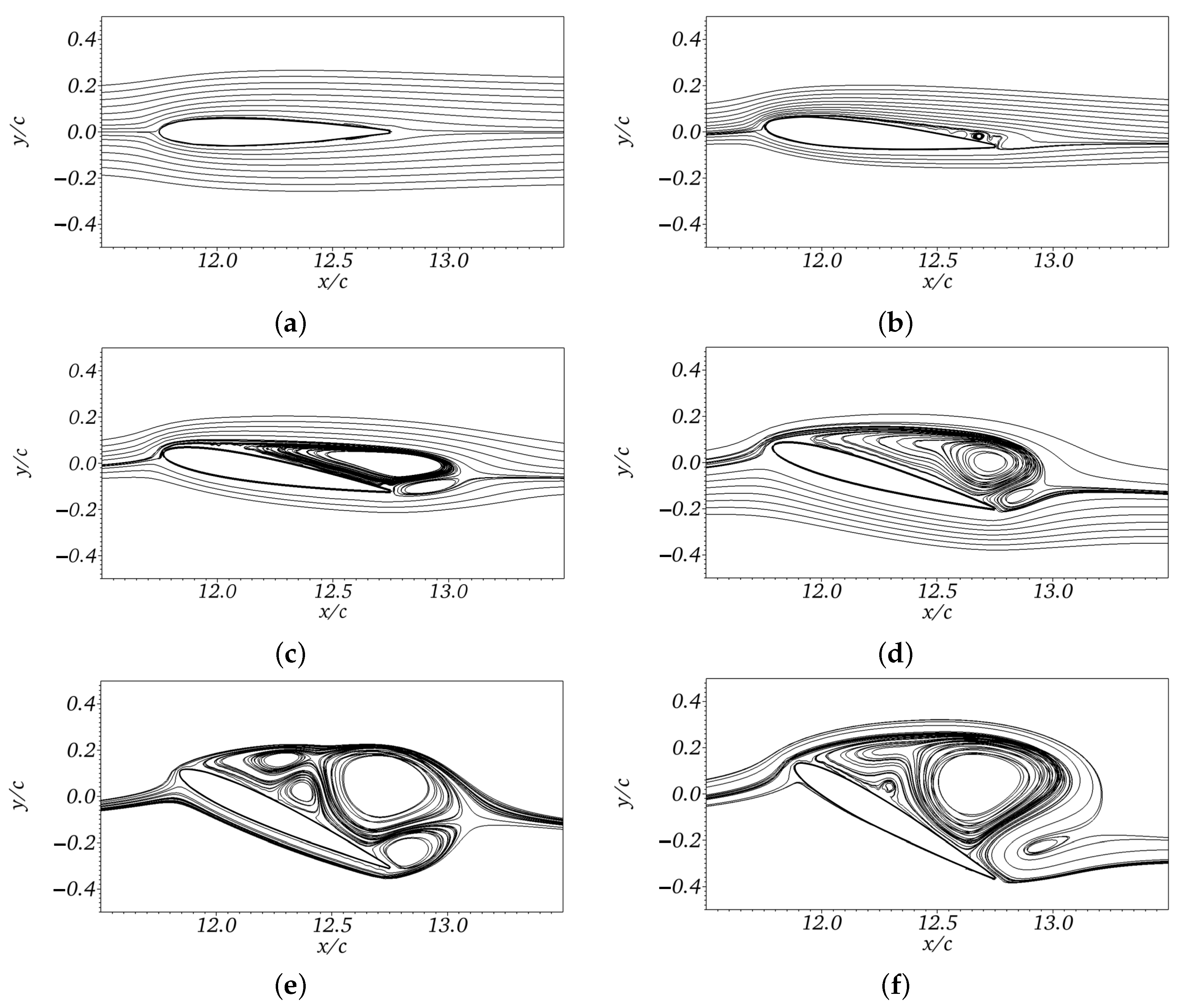
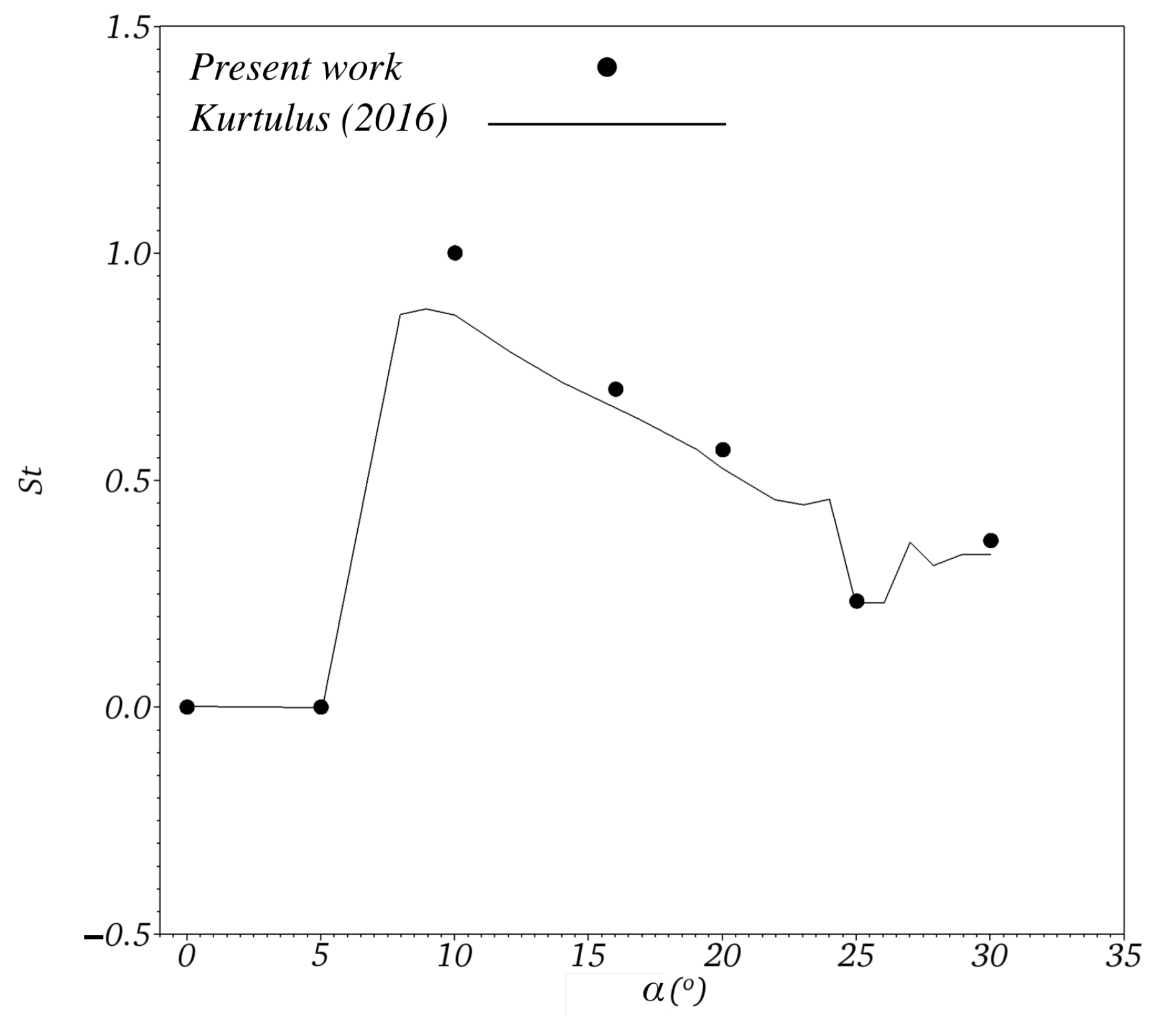
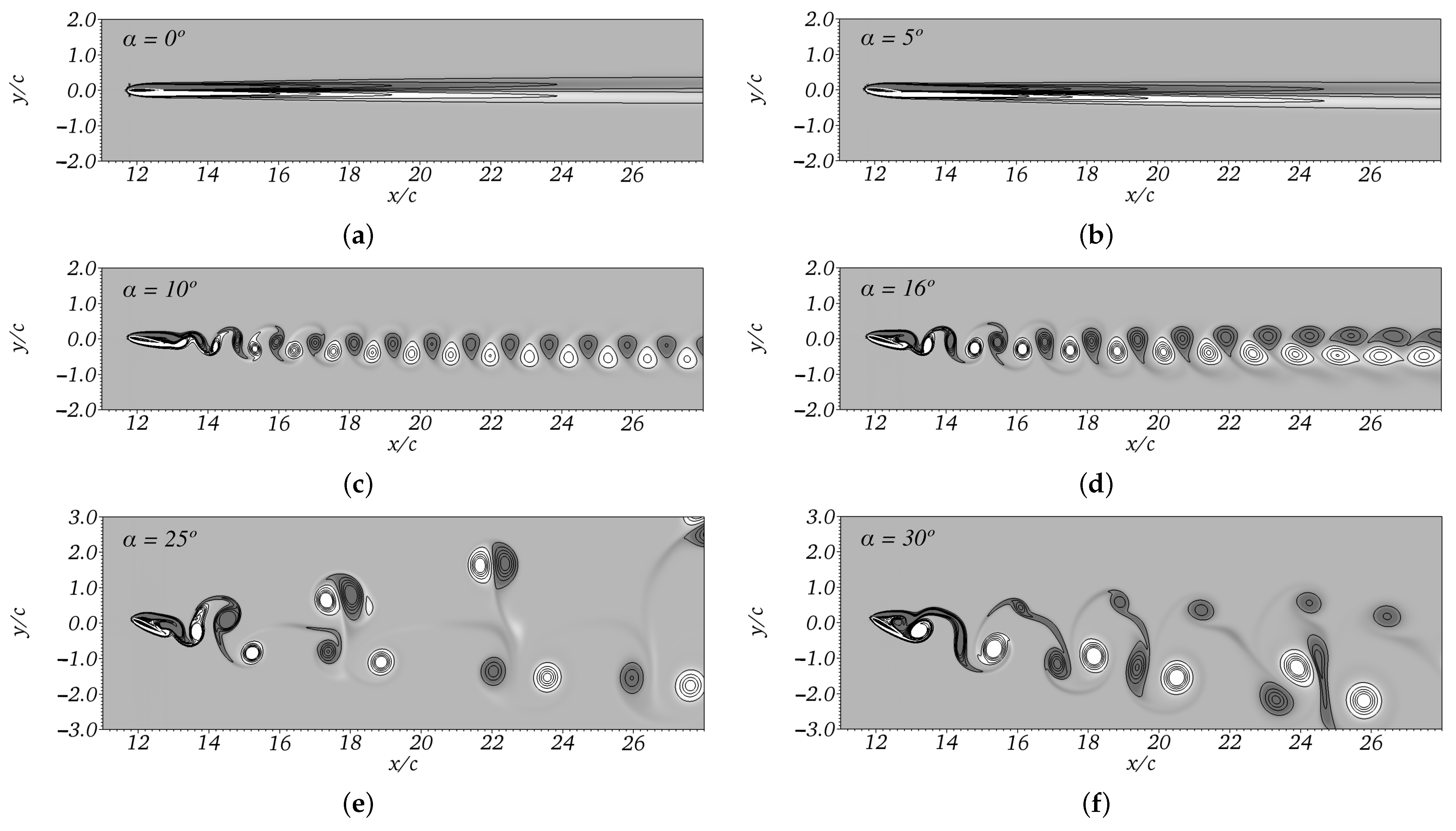
4.4. Influence of Angle of Attack
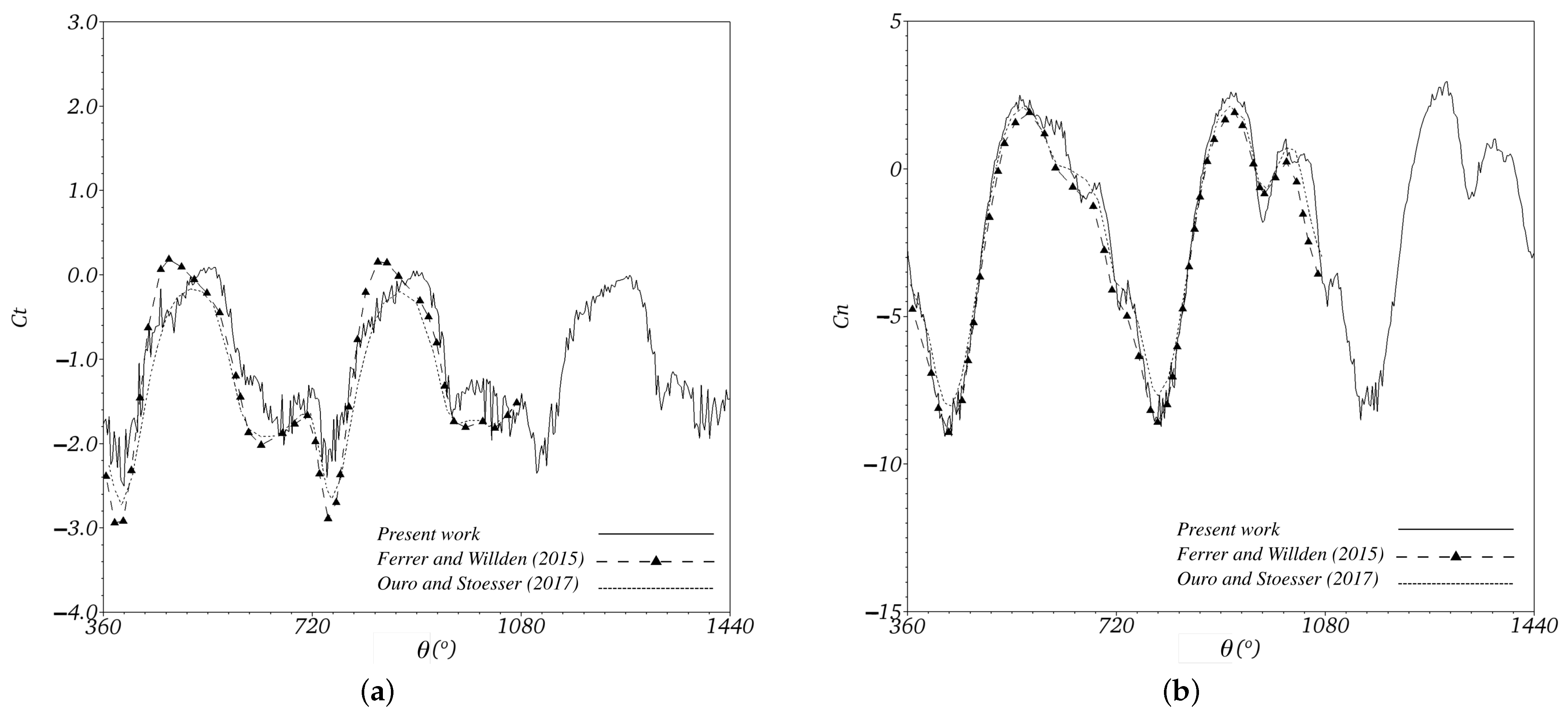
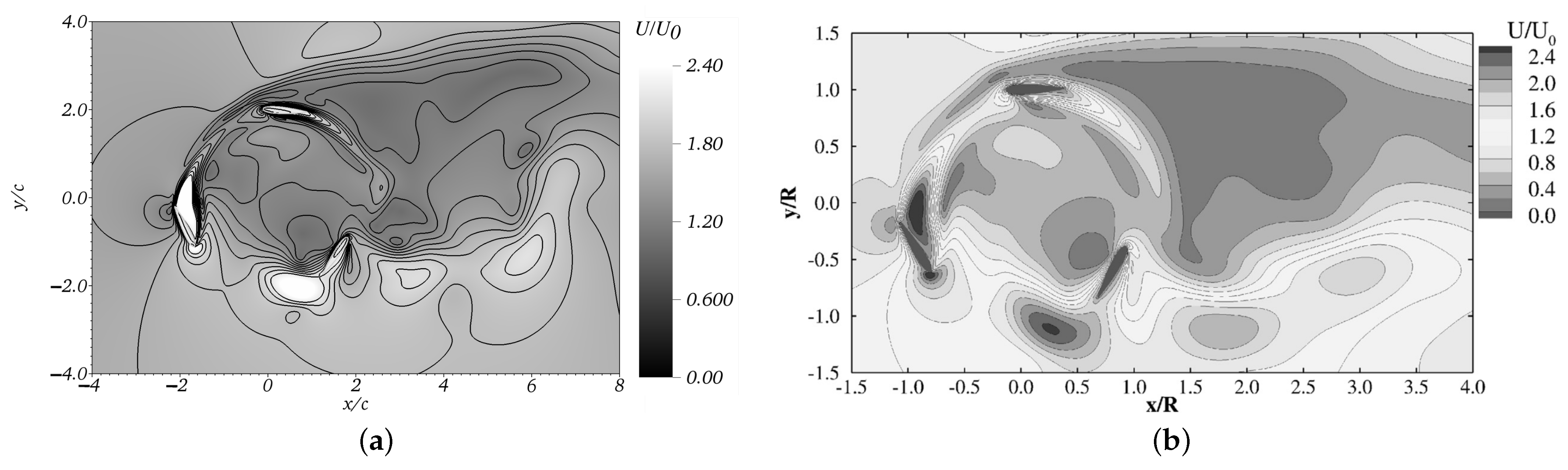
5. Flow over a Vertical Axis Turbine
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- John, D.; Anderson, J. Fundamentals of Aerodynamics, 6th ed.; McGraw-Hill Education: New York, NY, USA, 2017. [Google Scholar]
- Clercq, K.M.D.; de Kat, R.; Remes, B.; van Oudheusden, B.W.; Bijl, H. Aerodynamic Experiments on DelFly II: Unsteady Lift Enhancement. Int. J. Micro Air Veh. 2009, 1, 255–262. [Google Scholar] [CrossRef] [Green Version]
- Paraschivoiu, I. Wind Turbine Design With Emphasis on Darrieus Concept; Polytechnic International Press: Montreal, QC, Canada, 2002. [Google Scholar]
- Howell, R.; Qin, N.; Edwards, J.; Durrani, N. Wind tunnel and numerical study of a small vertical axis wind turbine. Renew. Energy 2010, 35, 412–422. [Google Scholar] [CrossRef] [Green Version]
- Castelli, M.R.; Englaro, A.; Benini, E. The Darrieus wind turbine: Proposal for a new performance prediction model based on CFD. Energy 2011, 36, 4919–4934. [Google Scholar] [CrossRef]
- Li, C.; Zhu, S.; Xu, Y.; Xiao, Y. 2.5D large eddy simulation of vertical axis wind turbine in consideration of high angle of attack flow. Renew. Energy 2013, 51, 317–330. [Google Scholar] [CrossRef] [Green Version]
- Ribeiro, A.; Awruch, A.; Gomes, H. An airfoil optimization technique for wind turbines. Appl. Math. Model. 2012, 36, 4898–4907. [Google Scholar] [CrossRef]
- Lee, Y.; Lim, H. Numerical study of the aerodynamic performance of a 500 W Darrieus-type vertical-axis wind turbine. Renew. Energy 2015, 83, 407–415. [Google Scholar] [CrossRef]
- Marinić-Kragić, I.; Vučina, D.; Milas, Z. Numerical workflow for 3D shape optimization and synthesis of vertical-axis wind turbines for specified operating regimes. Renew. Energy 2018, 115, 113–127. [Google Scholar] [CrossRef]
- Hansen, J.; Mahak, M.; Tzanakis, I. Numerical modelling and optimization of vertical axis wind turbine pairs: A scale up approach. Renew. Energy 2021, 171, 1371–1381. [Google Scholar] [CrossRef]
- Chena, J.; Wanga, Q.; Zhanga, S.; Eecenc, P.; Grasso, F. A new direct design method of wind turbine airfoils and wind tunnel experiment. Appl. Math. Model. 2016, 40, 2002–2014. [Google Scholar] [CrossRef]
- Wang, S.; Zhou, Y.; Alam, M.M.; Yang, H. Turbulent intensity and Reynolds number effects on an airfoil at low Reynolds numbers. Phys. Fluids 2014, 26, 1–23. [Google Scholar] [CrossRef]
- Venkataraman, D.; Bottaro, A. Numerical modeling of flow control on a symmetric aerofoil via a porous, compliant coating. Phys. Fluids 2012, 24, 093601. [Google Scholar] [CrossRef] [Green Version]
- Meena, M.G.; Taira, K. Low Reynolds Number Wake Modification Using a Gurney Flap; American Institute of Aeronautics and Astronautics: Washington, DC, USA, 2017; Volume 56. [Google Scholar]
- Ukken, M.G.; Sivapragasam, M. Aerodynamic shape optimization of airfoils at ultra-low Reynolds numbers. Sadhana 2019, 44, 130. [Google Scholar] [CrossRef] [Green Version]
- Seshadri, P.K.; Aravind, A.; De, A. Leading edge vortex dynamics in airfoils: Effect of pitching motion at large amplitudes. J. Fluids Struct. 2022, 116, 103796. [Google Scholar] [CrossRef]
- Mateescu, D.; Abdo, M. Analysis of flows past airfoils at very low Reynolds numbers. J. Aerosp. Eng. 2009, 224, 757–775. [Google Scholar] [CrossRef]
- Kurtulus, D.F. Vortex flow aerodynamics behind a symmetric airfoil at low angles of attack and Reynolds numbers. Int. J. Micro Air Veh. 2021, 13, 17568293211055653. [Google Scholar] [CrossRef]
- Nguyen, V.D.; Duong, V.D.; Trinh, M.H.; Nguyen, H.Q.; Nguyen, D.T.S. Low order modeling of dynamic stall using vortex particle method and dynamic mode decomposition. Int. J. Micro Air Veh. 2023, 15, 17568293221147923. [Google Scholar] [CrossRef]
- Ferrer, E.; Willden, R. Blade wake interactions in cross-flow turbines. Int. J. Mar. Energy 2015, 11, 71–83. [Google Scholar] [CrossRef] [Green Version]
- Ramírez, L.; Foulquié, C.; Nogueira, X.; Khelladi, S.; Chassaing, J.C.; Colominas, I. New high-resolution-preserving sliding mesh techniques for higher-order finite volume schemes. Comput. Fluids 2015, 118, 114–130. [Google Scholar] [CrossRef] [Green Version]
- Liang, C.; Ou, K.; Premasuthan, S.; Jameson, A.; Wang, Z. High-order accurate simulations of unsteady flow past plunging and pitching airfoils. Comput. Fluids 2011, 40, 236–248. [Google Scholar] [CrossRef]
- Canuto, C.; Hussaini, M.Y.; Quarteroni, A.; Zang, T.A. Spectral Methods: Fundamentals in Single Domains; Springer-Verlag: Berlin, Germany, 2006. [Google Scholar]
- Nascimento, A.A.; Mariano, F.P.; Padilla, E.L.M.; Silveira-Neto, A. Comparison of the convergence rates between Fourier pseudo-spectral and finite volume method using Taylor-Green vortex problem. J. Braz. Soc. Mech. Sci. Eng. 2020, 42, 1–10. [Google Scholar] [CrossRef]
- Mariano, F.P.; de Queiroz Moreira, L.; Nascimento, A.A.; Silveira-Neto, A. An improved immersed boundary method by coupling of the multi-direct forcing and Fourier pseudo-spectral methods. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 1–23. [Google Scholar] [CrossRef]
- Cooley, J.W.; Tukey, J.W. An Algorithm for the Machine Calculation of Complex Fourier Series. Math. Comput. 1965, 19, 215–234. [Google Scholar] [CrossRef]
- Briggs, W.L.; Henson, V.E. The DFT: An Owners’ Manual for the Discrete Fourier Transform; SIAM: Philadelphia, PA, USA, 1995. [Google Scholar]
- Peskin, C.S. The immersed boundary method. Acta Numer. 2002, 11, 479–517. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Fan, J.; Luo, K. Combined multi-direct forcing and immersed boundary method for simulating flows with moving particles. Int. J. Multiph. Flow 2008, 34, 283–302. [Google Scholar] [CrossRef]
- Zhong, G.; Du, L.; Sun, X. Numerical Investigation of an Oscillating Airfoil using Immersed Boundary Method. J. Therm. Sci. 2011, 20, 413–422. [Google Scholar] [CrossRef]
- Tay, W.B.; Deng, S.; van Oudheusden, B.; Bijl, H. Validation of immersed boundary method for the numerical simulation of flapping wing flight. Comput. Fluids 2015, 115, 226–242. [Google Scholar] [CrossRef]
- Yang, X.; He, G.; Zhang, X. Large-eddy simulation of flows past a flapping airfoil using immersed boundary method. Sci. China Phys. Mech. Astron. 2010, 53, 1101–1108. [Google Scholar] [CrossRef] [Green Version]
- Ouro, P.; Stoesser, T. An immersed boundary-based large-eddy simulation approach to predict the performance of vertical axis tidal turbines. Comput. Fluids 2017, 152, 74–87. [Google Scholar] [CrossRef] [Green Version]
- Posa, A. Wake characterization of coupled configurations of vertical axis wind turbines using Large Eddy Simulation. Int. J. Heat Fluid Flow 2019, 75, 27–43. [Google Scholar] [CrossRef]
- Mariano, F.; Moreira, L.; Silveira-Neto, A.; da Silva, C.; Pereira, J. A new incompressible Navier-Stokes solver combining Fourier pseudo-spectral and immersed boundary methods. CMES 2010, 1589, 1–35. [Google Scholar]
- Kinoshita, D.; Padilla, E.L.M.; da Silveira-Neto, A.; Mariano, F.P.; Serfaty, R. Fourier pseudospectral method for nonperiodical problems: A general immersed boundary method for three types of thermal boundary conditions. Numer. Heat Transf. Part B Fundam. 2016, 70, 537–558. [Google Scholar] [CrossRef]
- Silveira-Neto, A. Escoamentos Turbulentos: Análise Física e Modelagem Teórica, 1st ed.; Composer: Uberlândia, MG, Brazil, 2020. [Google Scholar]
- Pantakar, S.V. Numerical Heat Transfer and Fluid Flow; Hemisphere Publishing Corporation: Washington, DC, USA, 1980. [Google Scholar]
- Stockie, J.M. Analysis and Computation of Immersed Boundaries, with Application to Pulp Fibres. Ph.D. Thesis, Institute of Applied Mathematics, University of British Columbia, Vancouver, BC, Canada, 1997. [Google Scholar]
- Allampalli, V.; Hixon, R.; Nallasamy, R.; Sawyer, S. High-accuracy large-step explicit Runge-Kutta (HALE-RK) schemes for computational aeroacoustics. J. Comput. Phys. 2009, 228, 3837–3850. [Google Scholar] [CrossRef]
- Takahashi, D. FFTE: A Fast Fourier Transform Package. Available online: http://www.ffte.jp (accessed on 30 September 2022).
- Ilio, G.D.; Chiappini, D.; Ubertini, S.; Bella, G.; Succi, S. Fluid flow around NACA 0012 airfoil at low-Reynolds numbers with hybrid lattice Boltzmann method. Comput. Fluids 2018, 166, 200–208. [Google Scholar] [CrossRef]
- Kurtulus, D.F. On the wake pattern of symmetric airfoils for different incidence angles at Re=1000. Int. J. Micro Air Veh. 2016, 8, 109–139. [Google Scholar] [CrossRef] [Green Version]
- Kouser, T.; Xiong, Y.; Yang, D.; Peng, S. Direct Numerical Simulations on the three-dimensional wake transition of flows over NACA0012 airfoil at Re = 1000. Int. J. Micro Air Veh. 2021, 13, 1–15. [Google Scholar] [CrossRef]
- Tornberg, A.K.; Engquist, B. Numerical approximations of singular source terms in differential equations. J. Comput. Phys. 2004, 200, 462–488. [Google Scholar] [CrossRef]
- Liu, Y.; Li, K.; Zhang, J.; Wang, H.; Liu, L. Numerical bifurcation analysis of static stall of airfoil and dynamic stall under unsteady perturbation. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 3427–3434. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh | ||
|---|---|---|
| 0.5897 | 0.3670 | |
| 0.5264 | 0.2287 | |
| 0.4173 | 0.1881 | |
| [44] | 0.4184 | 0.1661 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monteiro, L.M.; Mariano, F.P. Flow Modeling over Airfoils and Vertical Axis Wind Turbines Using Fourier Pseudo-Spectral Method and Coupled Immersed Boundary Method. Axioms 2023, 12, 212. https://doi.org/10.3390/axioms12020212
Monteiro LM, Mariano FP. Flow Modeling over Airfoils and Vertical Axis Wind Turbines Using Fourier Pseudo-Spectral Method and Coupled Immersed Boundary Method. Axioms. 2023; 12(2):212. https://doi.org/10.3390/axioms12020212
Chicago/Turabian StyleMonteiro, Lucas Marques, and Felipe Pamplona Mariano. 2023. "Flow Modeling over Airfoils and Vertical Axis Wind Turbines Using Fourier Pseudo-Spectral Method and Coupled Immersed Boundary Method" Axioms 12, no. 2: 212. https://doi.org/10.3390/axioms12020212
APA StyleMonteiro, L. M., & Mariano, F. P. (2023). Flow Modeling over Airfoils and Vertical Axis Wind Turbines Using Fourier Pseudo-Spectral Method and Coupled Immersed Boundary Method. Axioms, 12(2), 212. https://doi.org/10.3390/axioms12020212