1. Introduction
Assorted applications of real-life relevance have been perfectly modeled through ordinary differential equations (ODEs) in the form of initial-value problems (IVPs) or boundary value problems (BVPs). In fact, ODEs have been widely acknowledged in modeling various physical processes, including population growth, radioactive decay, the movement of electric charges in electronic circuits, and cooling problems, among others. Further, the class of nonlinear ODEs is yet another interesting category of differential equations that has vast applications in modeling nonlinear and chaotic circumstances, to mention a few. Nevertheless, not all nonlinear ODEs provide actual analytical solutions using the known analytical approaches; indeed, a lot of these equations possess only numerical solutions. Hence, this negative aspect of nonlinear ODEs in providing actual analytical solutions and/or providing multiple actual solutions is what has prompted various mathematicians to put their minds to devising dissimilar computational ways to tackle different IVPs and BVPs [
1].
We recall the application of the shooting method [
2], one of the finest numerical methods devised to deal with the aforementioned negative aspect of certain nonlinear ODEs with regard to the existence of actual analytical solutions. Indeed, one of the astounding factors of this method is its ability to transform governing BVPs into corresponding systems of IVPs, where various existing solvers could be used; via this approach, solutions to BVPs are eventually acquired. In this regard, we mention the famous work of Morrison et al. [
3] that solved different nonlinear and linear BVPs via the shooting method. Moreover, Abu Shanab [
4] employed the shooting method to solve a class of third-order linear BVPs, while Oderinu and Aregbesola [
5] coupled Taylor’s series approach with the shooting method to study third-order nonlinear BVPs amidst two-point boundary data. On the same page as third-order BVPs, we make mention of the recent work of Nasir et al. [
6], which proposed a direct integration scheme to tackle such models with two- and multi-point boundary data. Srivastava and Hazarika [
7] developed an algorithm based on the shooting method for the solution of a two-point BVP consisting of a system of third-order simultaneous ODEs. Through their results, they concluded that the shooting method seems to be sufficiently convergent for the system, and the shooting method is preferable to obtain numerical solutions where other methods seem to be laborious in mathematical treatment. Subsequently, Attili and Syam [
8] proposed a combination of the Adomian decomposition method (ADM) and the shooting method to numerically examine second-order linear and nonlinear BVPs using a special integration operator; the same method was equally extended to third-order linear BVPs by Alzahrani et al. [
9]. Additionally, we also cite [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19] and the references therein for some relevant considerations through the ADM, and also refer the reader(s) to [
20,
21,
22,
23] for certain deliberations on the shooting approach.
However, motivated by the vast applications of third-order nonlinear ODEs in modeling diverse scientific processes, and the lack of both analytical and computational methods to tackle this very class of third-order ODEs, this study intends to computationally propose an efficient numerical scheme that would competently tackle this class of equations with two-point boundary data. More expressly, the governing model reads [
4,
6]
together with the following two-point boundary data:
In fact, we couple the efficient shooting method with the ADM, in what we called the “efficient decomposition shooting method” (EDSM); this study serves as an extension to the recent findings in [
9] by deploying a superior version of the ADM. Stepwise, the approach starts by transforming the principal BVP into a system of IVPs, and thereafter, solves the resulting IVPs recurrently via the application of the coupled technique, which is easier to execute and more numerically friendly than both the shooting and ADM procedures individually. What is more, the application of this method is demonstrated on several test examples, alongside deploying the competing numerical Runge–Kutta method, among others, for validation of the obtained results. In addition, we shall be providing some comparison plots and tables to support the findings of the present study. The rest of the paper is composed as follows:
Section 2 describes the traditional ADM technique, and
Section 3 gives an outline of the proposed coupling between the shooting method and the ADM to solve third-order nonlinear BVPs.
Section 4 demonstrates the application of the proposed coupling method to several test models, while
Section 5 gives some concluding annotations.
2. Traditional ADM for Third-Order Nonlinear IVPs
The traditional ADM is an energetic semi-analytical and, at the same time, numerical method for solving different forms of both linear and nonlinear ordinary and partial differential equations [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19]. Thus, we shall be applying this traditional method to a generalized third-order nonlinear IVP in what follows.
Moreover, the ADM is typically deployed on a differential equation when expressed in differential operator form as follows:
together with the following prescribed initial data
where
and
are linear and the nonlinear differential operators with orders of less than
, respectively, while
is a forcing term. Additionally, the constants
and
in Equation (4) are prescribed real constants.
Since
is a third-order differential operator, the inverse operator
is defined as follows:
Applying
defined in Equation (5) to Equation (3) gives
where
denotes the terms emanating as a result of the integration.
Therefore, we make use of an infinite series via Adomian’s method to represent the solution
as
and the nonlinear term
through
with
’s representing the polynomials by Adomian, which are determined through the following formula:
Hence, the ADM procedure yields the following iterative scheme:
Eventually, the resulting approximate solution of the governing model expressed in Equations (3) and (4) is thus obtained by taking the net sum of the components in Equation (10) as follows:
We remark here that the convergence of the Adomian series has already been proven by several investigators [
24,
25]; moreover, for some prerequisites about the existence and uniqueness of solutions for higher-order BVPs, one may read the comprehensive survey provided by Agarwal [
26].
The convergence of Adomian‘s technique is ensured with a weak hypothesis on the nonlinear operator and on the functional equation. Cherruault [
24] gave the first proof of the convergence of the Adomian decomposition method and he used fixed-point theorems for abstract functional equations. In [
24], Cherruault avoided this type of hypothesis, which is difficult to satisfy and to verify in physical problems. They supposed the following:
can be represented as a series of functions
, i.e.,
. Furthermore, this series is supposed to be absolutely convergent, i.e.,
.
- (ii)
The nonlinear function is developable in entire series with a convergence radius equal to infinity. In other words, we may write
This last hypothesis is almost always satisfied in concrete physical problems. We have the following results:
Theorem 1. With the previous hypotheses (i) and (ii), the Adomian series is a solution of Equation (11) when the s satisfy the following relationships: Remark. In [
24]
, it is proven that Adomian’s polynomials depend only on . In practice, Adomian’s method gives very good results even if we take a truncated series with a small number of terms. The reason for such a result is the analogy of the Adomian series with the Taylor series.
Theorem 2. Let be an operator from a Hilbert space into and be the exact solution of Equation (11). The decomposition series , which is obtained by (10), converges to when .
3. EDSM for Third-Order Nonlinear BVPs
A general two-point boundary value problem can be written in the following form:
where Equation (15) describes the boundary conditions satisfied by the system. Two-point boundary value problems from optimal control have separate boundary conditions of the type
Provided it converges, the shooting method is the simplest, fastest and most accurate method [
27] to solve two-point boundary value problems. However, it is well known that the simple shooting method can fail to converge for problems whose solutions are very sensitive to the initial conditions. For such problems, finite difference and collocation methods can provide a solution that satisfies the boundary conditions and is close to the actual solution in some sense. The finite difference and collocation methods are much harder to set up than shooting methods. For nonlinear problems, quasi-linearization is used along with finite difference schemes.
This led to the development of the shooting method and the proposal of a modified version of the shooting method called the “efficient decomposition shooting method”.
In [
21] Ha discussed the simple shooting method for nonlinear two-point boundary value problems and observed rapid convergence in his numerical experiments. It may be useful here to present the following results in the study of a system of ODEs [
28]:
Theorem 3 (existence). Let
be continuous and satisfy the Lipschitz conditionwith a Lipschitz constant on the interval for all .
Then for any constant vector , the differential Equation (14) has a solution of with the initial condition .
Theorem 4 (uniqueness). If satisfies the Lipschitz condition for , then there is at most one solution of (14) with the initial condition .
In spite of the abundant literature and convergence analyses, it seems that the use of the simple shooting method has been neglected over the years by researchers to obtain numerical solutions to higher-order nonlinear two-point boundary value problems. The goal of the present work is to demonstrate the importance and capability of the efficient decomposition shooting method in easily obtaining numerical solutions to third-order two-point BVPs arising in other areas of research.
The shooting method [
4] coupled with the ADM is an iterative method that has been widely utilized to solve various classes of BVPs [
7,
8,
20,
21,
22,
23]. However, the iterative shooting method procedures for solving both cases of linear and nonlinear BVPs remain the same [
9], except for the fact that the solution of the nonlinear model cannot be represented as a linear combination of the solutions of two IVPs. As such, the solution of the governing BVP (1)–(2) is approximated by those of the IVPs, with
t as a parameter. So, we convert the third-order BVP into IVPs, where we replace the boundary data with specific initial conditions. Expressly, the problem has the following form:
with the initial data in the form
However, as obtaining actual solutions to these IVPs is not generally feasible, the solutions are approximated using any method for solving IVPs, like the one-step methods, multistep methods or using the ADM directly. This also includes transforming the models into a system of equations.
In this regard, the ADM is deployed directly in the present study to solve the IVP expressed in Equations (16) and (17). In doing so, we begin by selecting the parameters
in such a way that the following is guaranteed:
where
presents the solution to the IVP given in Equations (16) and (17) with
, while the function
represents the solution to the BVP in Equations (1) and (2). Therefore, the expected solution to the resulting first IVP is required to be in sequence form after constraining the initial guess
. Then, we make use of Newton’s method to find the value of
as follows:
So, to determine the value of
, Equations (16) and (17) are scaled to depend on the
and
variables as follows:
with the following initial data
Next, on finding the partial derivate of Equation (20) in
, let
; the IVP expressed in Equations (20) and (21) is thus simplified as follows:
For
, the initial data are simplified as follows:
Finally, we solve Equations (22) and (23) at
using the ADM directly, which gives
. Also, to determine the complete sequence, the guess points
for
, together with the nonlinear function
, are thus found via the application of the Secant iterative method as follows:
Moreover, it is worth mentioning here that the computational procedure in the proposed scheme is terminated upon satisfying the following condition:
In addition, the shooting method for nonlinear BVPs converges whenever the problem is well posed in the sense that the solution to be computed is isolated. To compute non-isolated solutions using shooting methods, one would have to use Newton’s method, which employs the generalized inversion process, rather than just the inverse of the Jacobian [
29].
Indeed, there are many problems for which shooting methods are eminently suitable and offer many advantages. They depend on reliable and readily available routines for solving IVPs. In contrast to global methods for BVPs, shooting methods are very economical for computer storage; the discretized version usually has its mesh automatically adjusted to the behavior of the solution, and subject to the inherent limitations of a shooting method, it is easy to increase the accuracy of a solution [
30].
4. Numerical Examples
This section checks the proposed EDSM for third-order nonlinear BVPs by demonstrating its applicability to some test models of concern. This method is also compared with a mixture of the shooting method and the Runge–Kutta method of the fourth order (SRKM4) to further assess the performance of the approach. Other existing methods in the literature will equally be recalled while commenting on the acquired approximate results. Additionally, we provide
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6 and
Table 7 and
Figure 1,
Figure 2 and
Figure 3, reporting the absolute error difference between the available actual analytical solutions and, on the other hand, the obtained approximate solutions using the proposed
. Moreover, the validation of the proposed approximate solution is carried out using
.
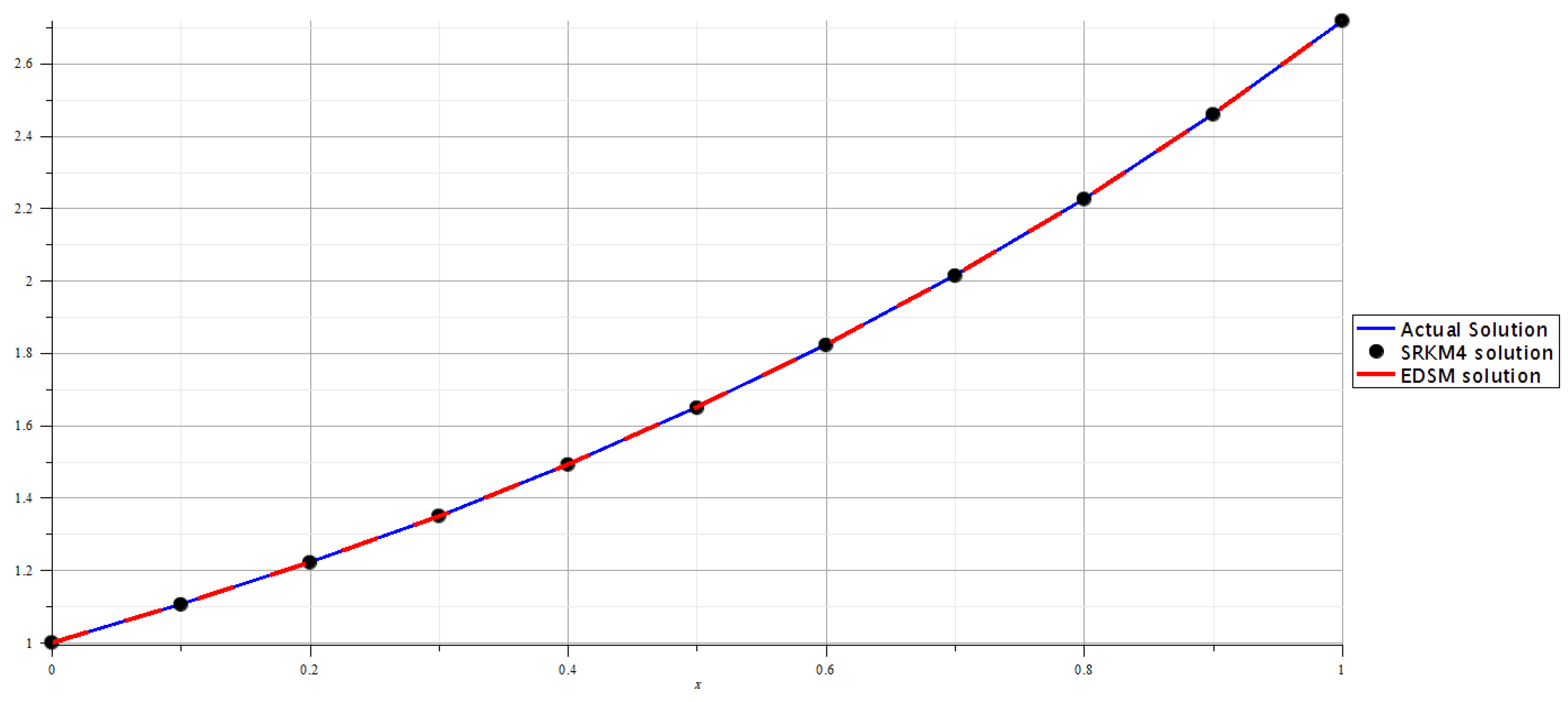
Example 1. Consider the third-order nonlinear BVP as follows [31]: The actual analytical solution is given by .
Firstly, we consider the following two IVPs:
and
Then, when we employ the ADM, the recursive relations are obtained as follows:
and
where
in the above schemes denotes the Adomian polynomials for the nonlinear term
. Consequently, the solution of Equation (27) with
is obtained in series form as follows:
Figure 1.
Graphical comparison depicting the exact and contending approximate solutions with .
Figure 1.
Graphical comparison depicting the exact and contending approximate solutions with .
Figure 2.
Graphical comparison depicting the exact and contending approximate solutions with .
Figure 2.
Graphical comparison depicting the exact and contending approximate solutions with .
Figure 3.
Graphical comparison depicting the exact and contending approximate solutions with .
Figure 3.
Graphical comparison depicting the exact and contending approximate solutions with .
Table 1.
The absolute errors for SRKM4 and EDSM when .
Table 1.
The absolute errors for SRKM4 and EDSM when .
| x | | |
|---|
| 0.0 | | |
| 0.1 | | |
| 0.2 | | |
| 0.3 | | |
| 0.4 | | |
| 0.5 | | |
| 0.6 | | |
| 0.7 | | |
| 0.8 | | |
| 0.9 | | |
| 1.0 | | |
Table 2.
Comparison between different methods when .
Table 2.
Comparison between different methods when .
| Numerical Methods | SBCM [31] | SRKM4 | EDSM |
|---|
| Maximum Error | | | |
Table 3.
The absolute errors for SRKM4 and EDSM when .
Table 3.
The absolute errors for SRKM4 and EDSM when .
| x | | |
|---|
| 0.0 | | |
| 0.1 | | |
| 0.2 | | |
| 0.3 | | |
| 0.4 | | |
| 0.5 | | |
| 0.6 | | |
| 0.7 | | |
| 0.8 | | |
| 0.9 | | |
| 1.0 | | |
Therefore, when using 5 iterations,
represents the solution to the third-order BVP (26) with
; see
Table 1 and
Table 2 for the numerical results.
In
Table 1, we report the absolute error difference between the actual analytical solution and the proposed solution
and further validate it with
. From
Table 2, we can see that EDSM is the most accurate technique for solving the governing model in comparison with the SRKM4 and the method used in [
31]. Again, we portray the actual analytical and the contending approximate solutions in
Figure 1, where one would notice an ideal agreement between the solutions.
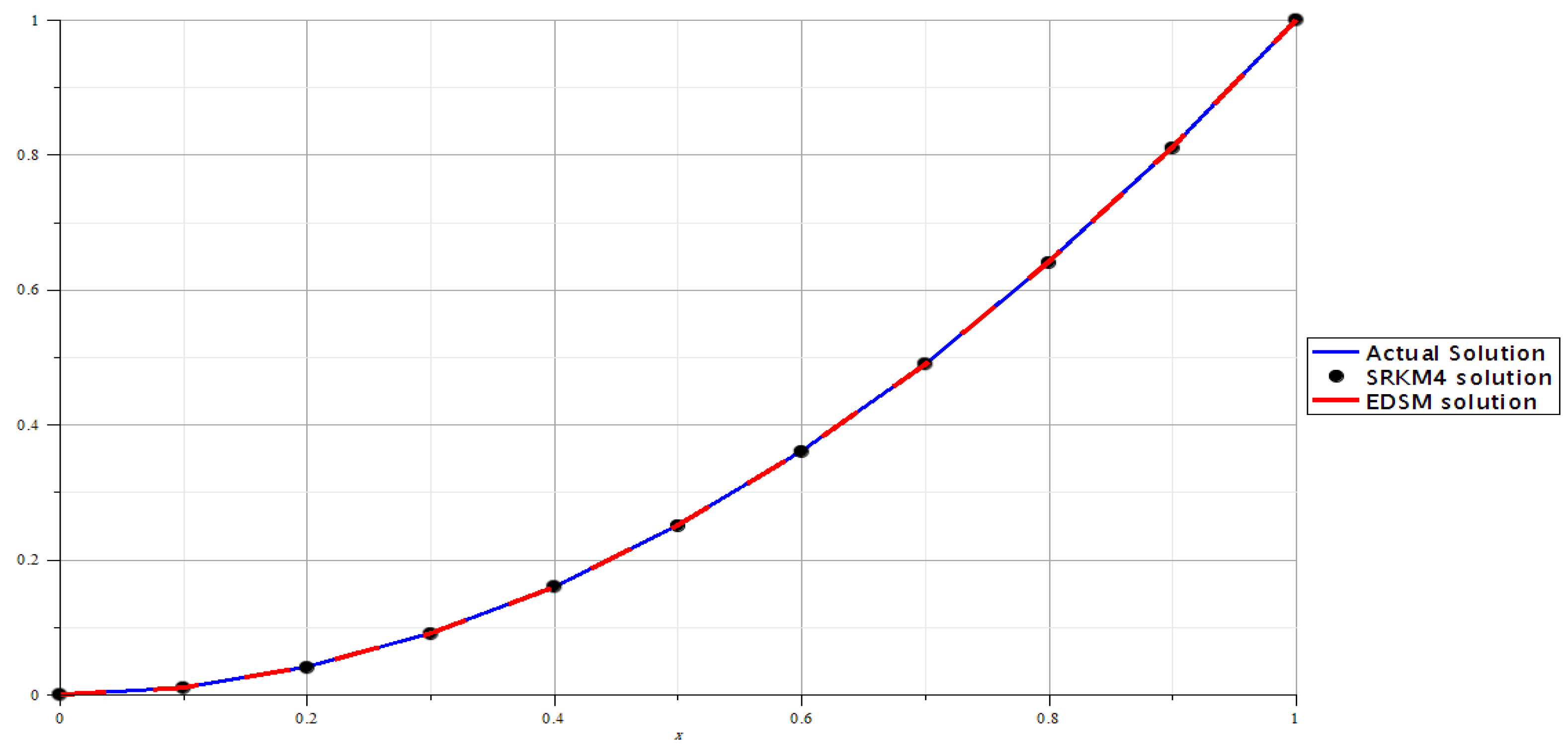
Example 2. Consider the third-order nonlinear BVP as follows [32]: The actual analytical solution is given by .
In the same manner, we refer to the following IVPs:
and
Then, the recursive relations are obtained as follows:
and
where
in the above schemes denote the Adomian polynomials for the nonlinear term
see
Table 3 for the numerical results, using five iterations.
Table 3 shows that EDSM is a more efficient technique for solving the governing model in comparison with SRKM4. Additionally, a good degree of exactitude in the graphical representation of the exact analytical and approximation solutions is shown in
Figure 2.
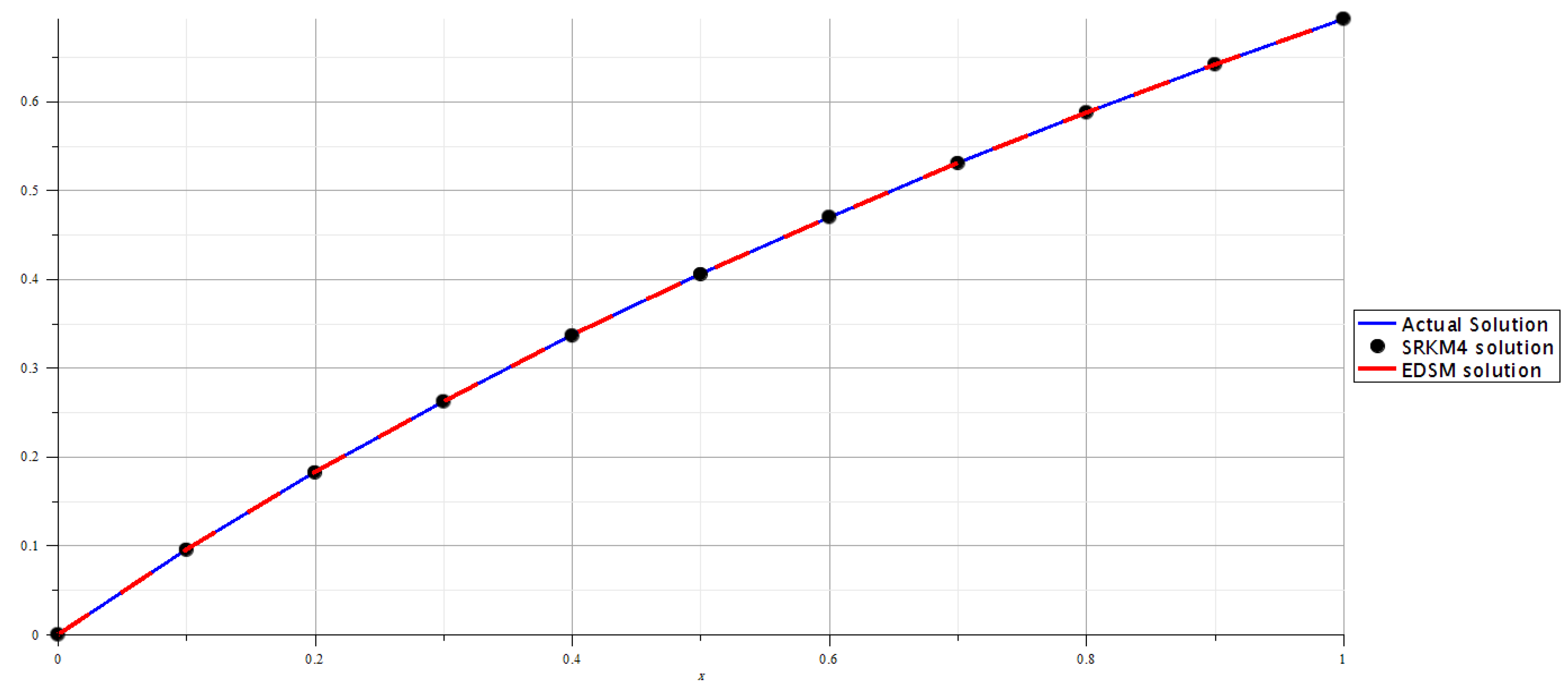
Example 3. Consider the third-order nonlinear BVP [33,34,35,36] which produces the actual solution . In the same manner, we refer to the following IVPs:
and
Then, the recursive relations take the following forms:
and
where
in the above schemes denote the Adomian polynomials for the nonlinear term
; see
Table 4 and
Table 5 for the numerical results, using six iterations.
Table 4.
The absolute errors for SRKM4 and EDSM when .
Table 4.
The absolute errors for SRKM4 and EDSM when .
| x | | |
|---|
| 0.0 | | |
| 0.1 | | |
| 0.2 | | |
| 0.3 | | |
| 0.4 | | |
| 0.5 | | |
| 0.6 | | |
| 0.7 | | |
| 0.8 | | |
| 0.9 | | |
| 1.0 | | |
Table 5.
Comparison between different methods when .
Table 5.
Comparison between different methods when .
| Numerical Methods | BPGWRM [33] | GJGOMM [34] | - Iteration [35]
| PGEM [36] | SRKM4 | EDSM |
|---|
| Maximum Error | | | | | | |
The absolute error difference between the exact analytical solution and the suggested solution
, which is further validated with
, is presented in
Table 4. From
Table 5, we can see that EDSM is the most accurate technique for solving the governing model in comparison with SRKM4 and the methods used in [
33,
34,
35,
36]. Furthermore,
Figure 3 shows precise depictions of the analytical and approximate curves, where the two are in good conformity.
Example 4. Consider the following third-order nonlinear BVP [35,36]: In the same manner, we refer to the following IVPs:
and
Then the recursive relations take the following forms:
and
where
and
in the above schemes denote the Adomian polynomials for the nonlinear terms
and
, respectively; see
Table 6 and
Table 7 for the numerical results, using six iterations.
Table 6.
The absolute errors for EDSM when .
Table 6.
The absolute errors for EDSM when .
| x | |
|---|
| 0.0 | |
| 0.1 | |
| 0.2 | |
| 0.3 | |
| 0.4 | |
| 0.5 | |
| 0.6 | |
| 0.7 | |
| 0.8 | |
| 0.9 | |
| 1.0 | |
Table 7.
Comparison between different methods when .
Table 7.
Comparison between different methods when .
| Numerical Methods | - Iteration [35]
| PGEM [36] | EDSM |
|---|
| Maximum Error | | | |
In
Table 6, we estimated the error in
using
because this problem does not have a known closed-form solution. Therefore, from
Table 7, we can see that EDSM is the most accurate technique for solving the governing model in comparison with the methods used in [
35,
36]; for more on some efficient numerical algorithms that are equally relevant, one may read [
37,
38] by Du Fort-Frankel for information on the fixed domain technique and finite difference scheme, respectively.
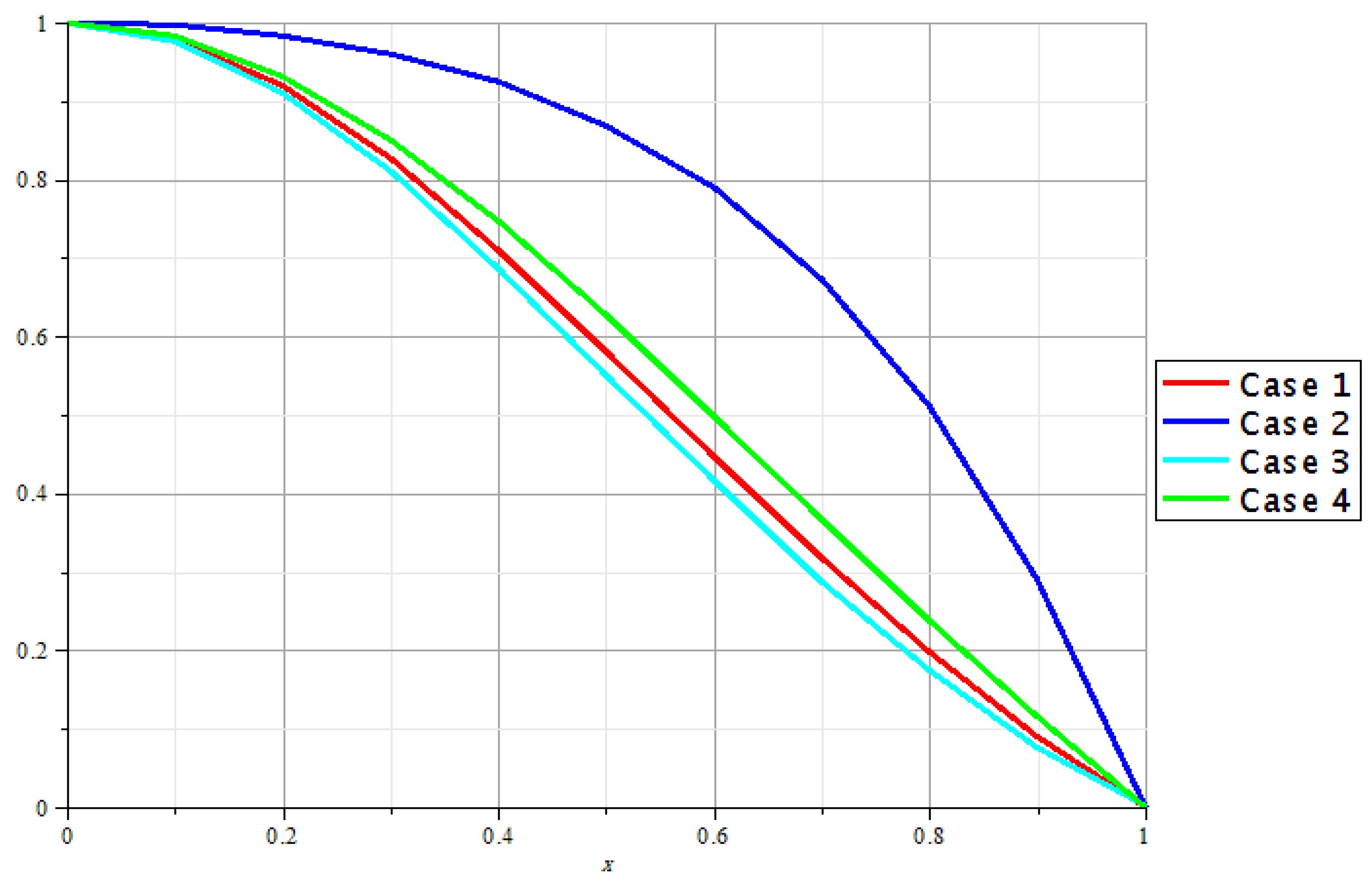
Example 5. Consider the nonlinear MHD Jeffery–Hamel blood flow problem as follows [39]: where is a non-zero parameter (read [
39]
for more details) and is the Reynolds number. In the same manner, we refer to the following IVPs: Then, the recursive relations are accordingly obtained as follows:
and
where
in the above schemes denotes the Adomian polynomials for the nonlinear term
see
Table 8 and
Table 9 for the numerical results, using six iterations.
Table 8.
The absolute errors for EDSM when .
Table 8.
The absolute errors for EDSM when .
| x | |
|---|
Case 1
| Case 2
| Case 3
| Case 4
|
|---|
| 0.0 | | | | |
| 0.1 | | | | |
| 0.2 | | | | |
| 0.3 | | | | |
| 0.4 | | | | |
| 0.5 | | | | |
| 0.6 | | | | |
| 0.7 | | | | |
| 0.8 | | | | |
| 0.9 | | | | |
| 1.0 | | | | |
Table 9.
Comparison between different methods when .
Table 9.
Comparison between different methods when .
| Numerical Methods | Maximum Error |
|---|
| Case 1 | Case 2 | Case 3 | Case 4 |
|---|
| | | | |
| HPM [39] | | | | |
The Jeffery–Hamel blood flow problem is solved by EDSM for four different cases, each of which is generated by taking four different values of “
” and “
”. In
Table 8, we estimated the error in
using
because this problem does not have a known closed-form solution. From
Table 9, we can see that EDSM is the most accurate technique for solving the governing model in comparison with the method used in [
39]. Again, we portray the approximate solutions of the EDSM for four different cases in
Figure 4. The graphical representation of the problem shows that if we increase the values of
, the human arterial blood flow decreases, i.e., they have an inverse relation, and this pattern is same for all of the different cases.
Figure 4.
Graphical comparison depicting approximate solution of EDSM for the four cases with .
Figure 4.
Graphical comparison depicting approximate solution of EDSM for the four cases with .








{kind=link}
{kind=link}
{kind=link}
{kind=link}
