Generalized Briot-Bouquet Differential Equation Based on New Differential Operator with Complex Connections




{kind=link}
Abstract
:1. Introduction
2. Differential Operators
3. Briot–Bouquet Differential Equation
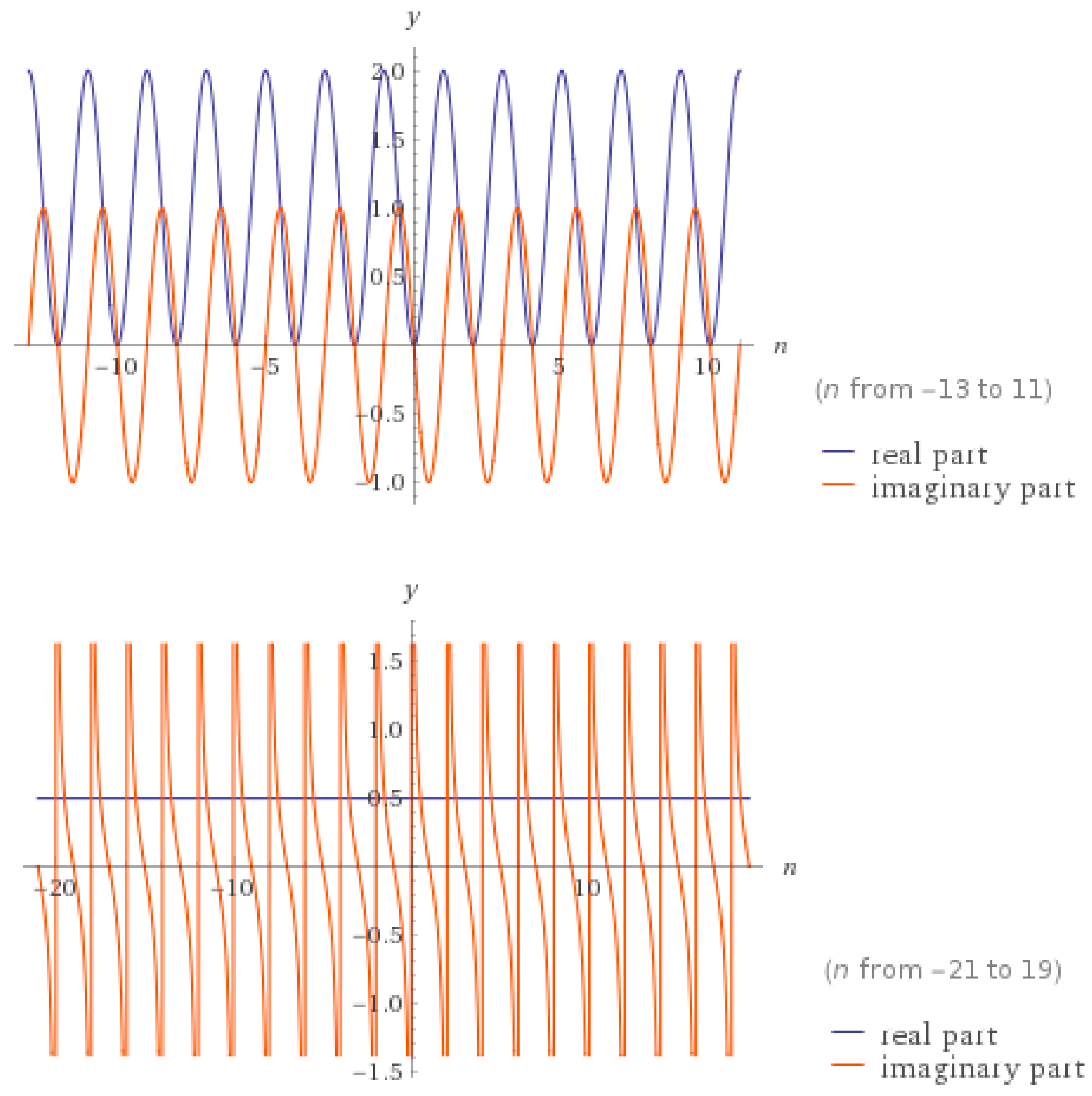
Numerical Examples
- The nonlinear model that we studied has no computational complexity cost. It is, fairly enough, not high speed because we have one variable and one parameter.
- It focuses on a starlike formula, which corresponds to the diffusion of the natural system of differential equations. Therefore, we reformulated the Dunkl operator to be suitable for this study.
- Theorem 2 gives the upper analytic solution in the open unit disk. Moreover, the upper bound solution is convex univalent; thus, all the trajectories approximate slightly the solution of Equation (7).
4. Linear Combination Operator
5. Subordination Inequalities
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lupas, A.A. On special differential subordinations using Salagean and Ruscheweyh operators. Math. Inequal. Appl. 2009, 12, 781–790. [Google Scholar]
- Ruscheweyh, S. New criteria for univalent functions. Proc. Am. Math. Soc. 1975, 49, 109–115. [Google Scholar] [CrossRef]
- Salagean, G.S. Subclasses of univalent functions. In Complex Analysis—Fifth Romanian-Finnish Seminar; Springer: Berlin, Germany, 1983; Volume 1013, pp. 362–372. [Google Scholar]
- Ibrahim, R.W. Arched foot based on conformal complex neural network testing. Math. Comput. Simul. 2020, 174, 175–182. [Google Scholar] [CrossRef]
- Ibrahim, R.W. Conformal Geometry of the Turtle Shell. J. King Saud Univ. Sci. 2020, 32, 2202–2206. [Google Scholar] [CrossRef]
- Ibrahim, R.W.; Darus, M. Subordination inequalities of a new Salagean-difference operator. Int. J. Math. Comput. Sci. 2019, 14, 573–582. [Google Scholar]
- Dunkl, C.F. Differential-difference operators associated with reflections groups. Trans. Am. Math. Soc. 1989, 311, 167–183. [Google Scholar] [CrossRef]
- Genest, V.X.; Lapointe, A.; Vinet, L. The Dunkl-Coulomb problem in the plane. Phys. Lett. A 2015, 379, 923–927. [Google Scholar] [CrossRef] [Green Version]
- Rösler, M. Dunkl Operators: Theory and Applications. In Orthogonal Polynomials and Special Functions; Koelink, E., Van Assche, W., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; Volume 1817. [Google Scholar]
- Miller, S.S.; Mocanu, P.T. Differential Subordinations: Theory and Applications; CRC Press: Boca Raton, FL, USA, 2000. [Google Scholar]
- Ebrahimi, F.; Mohammadi, K.; Barouti, M.M.; Habibi, M. Wave propagation analysis of a spinning porous graphene nanoplatelet-reinforced nanoshell. Waves Random Complex Media 2019, 1–27. [Google Scholar] [CrossRef]
- Habibi, M.; Mohammadgholiha, M.; Safarpour, H. Wave propagation characteristics of the electrically GNP-reinforced nanocomposite cylindrical shell. J. Braz. Soc. Mech. Sci. Eng. 2019, 41, 221. [Google Scholar] [CrossRef]
- Ibrahim, R.W.; Hadid, S.B.; Momani, S. Generalized Briot–Bouquet differential equation by a quantum difference operator in a complex domain. Int. J. Dyn. Control 2020, 1–10. [Google Scholar] [CrossRef]
- Ma, W.C.; Minda, D. A unified treatment of some special classes of univalent functions. In Proceedings of the Conference on Complex Analysis, Tianjin, China, 19–23 June 1992. [Google Scholar]
- Cho, N.E.; Kumar, V.; Kumar, S.S.; Ravichandran, V. Radius problems for starlike functions associated with the sine function. Bull. Iran. Math. Soc. 2019, 45, 213. [Google Scholar] [CrossRef]
- Khatter, K.; Ravichandran, V.; Kumar, S.S. Starlike functions associated with exponential function and the lemniscate of Bernoulli. Rev. Real Acad. Cienc. Exactas Ser. A Mat. 2019, 113, 233–253. [Google Scholar] [CrossRef]
- Mendiratta, R.; Nagpal, S.; Ravichandran, V. On a subclass of strongly starlike functions associated with exponential function. Bull. Malays. Math. Sci. Soc. 2015, 38, 365–386. [Google Scholar] [CrossRef]
- Kumar, V.; Cho, N.E.; Ravichandran, V.; Srivastava, H.M. Sharp coefficient bounds for starlike functions associated with the Bell numbers. Math. Slovaca 2019, 69, 1053–1064. [Google Scholar] [CrossRef]
- Kanas, S.; Wisniowska, A. Conic domains and starlike functions. Rev. Roum. Math. Pures Appl. 2000, 45, 647–657. [Google Scholar]
- Uralegaddi, B.A.; Ganigi, M.D.; Sarangi, S.M. Univalent functions with positive coefficients. Tamkang J. Math. 1994, 25, 225–230. [Google Scholar]
- Lupaş, A.A. Some differential subordinations using Ruscheweyh derivative and Salaagean operator. Adv. Differ. Equ. 2013, 2013, 150. [Google Scholar] [CrossRef] [Green Version]
- Yousef, A.T.; Salleh, Z. On a Harmonic Univalent Subclass of Functions Involving a Generalized Linear Operator. Axioms 2020, 9, 32. [Google Scholar] [CrossRef] [Green Version]

© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ibrahim, R.W.; Elobaid, R.M.; Obaiys, S.J. Generalized Briot-Bouquet Differential Equation Based on New Differential Operator with Complex Connections. Axioms 2020, 9, 42. https://doi.org/10.3390/axioms9020042
Ibrahim RW, Elobaid RM, Obaiys SJ. Generalized Briot-Bouquet Differential Equation Based on New Differential Operator with Complex Connections. Axioms. 2020; 9(2):42. https://doi.org/10.3390/axioms9020042
Chicago/Turabian StyleIbrahim, Rabha W., Rafida M. Elobaid, and Suzan J. Obaiys. 2020. "Generalized Briot-Bouquet Differential Equation Based on New Differential Operator with Complex Connections" Axioms 9, no. 2: 42. https://doi.org/10.3390/axioms9020042
APA StyleIbrahim, R. W., Elobaid, R. M., & Obaiys, S. J. (2020). Generalized Briot-Bouquet Differential Equation Based on New Differential Operator with Complex Connections. Axioms, 9(2), 42. https://doi.org/10.3390/axioms9020042