


A Simplified Model Predictive Control for Asymmetrical Six-Phase Induction Motors That Eliminates the Weighting Factor



Abstract
:1. Introduction
2. Asymmetrical Six-Phase Induction Motor Drives
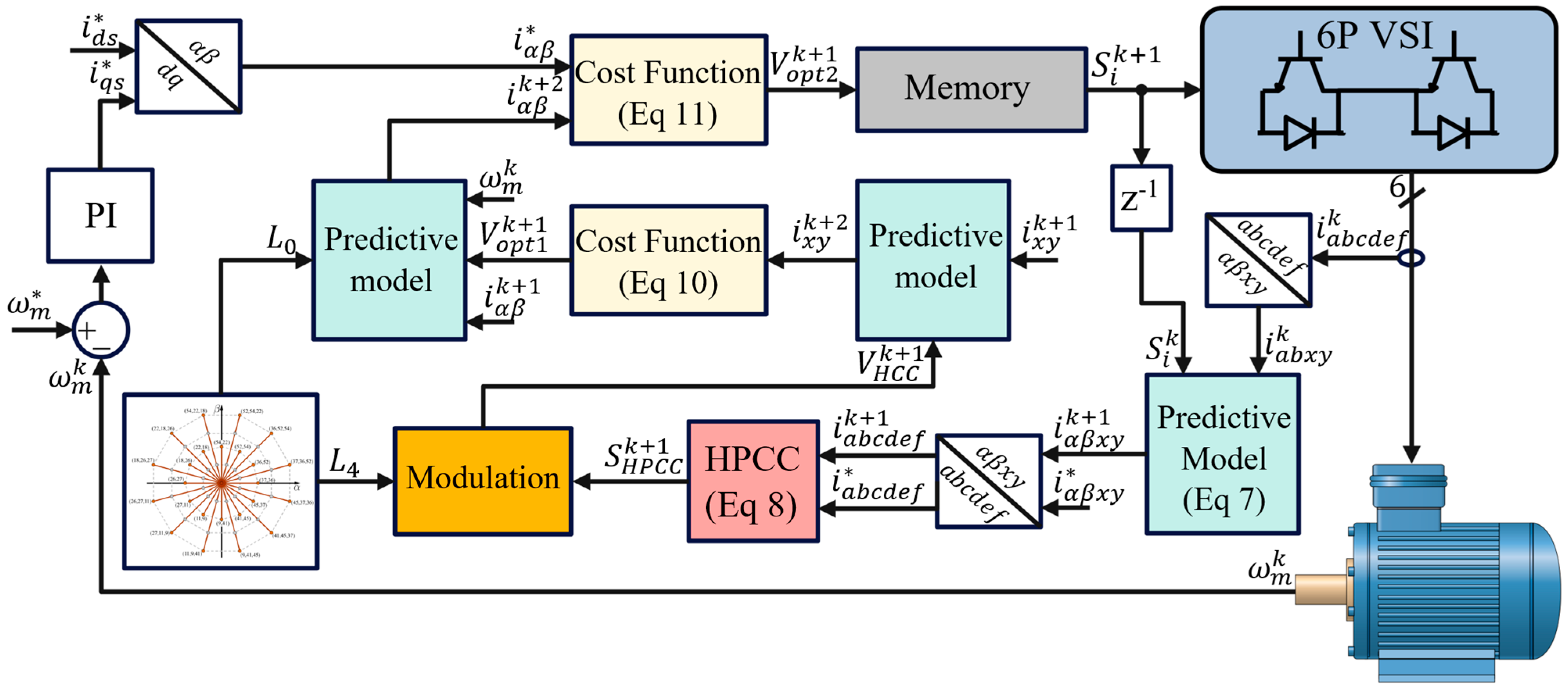
3. Proposed HMPCC
3.1. HPCC Principle
3.2. Modulation Stage
3.3. Predictive Current Control
3.4. Memory Stage
4. Experimental Validation
4.1. Experimental Test Bench
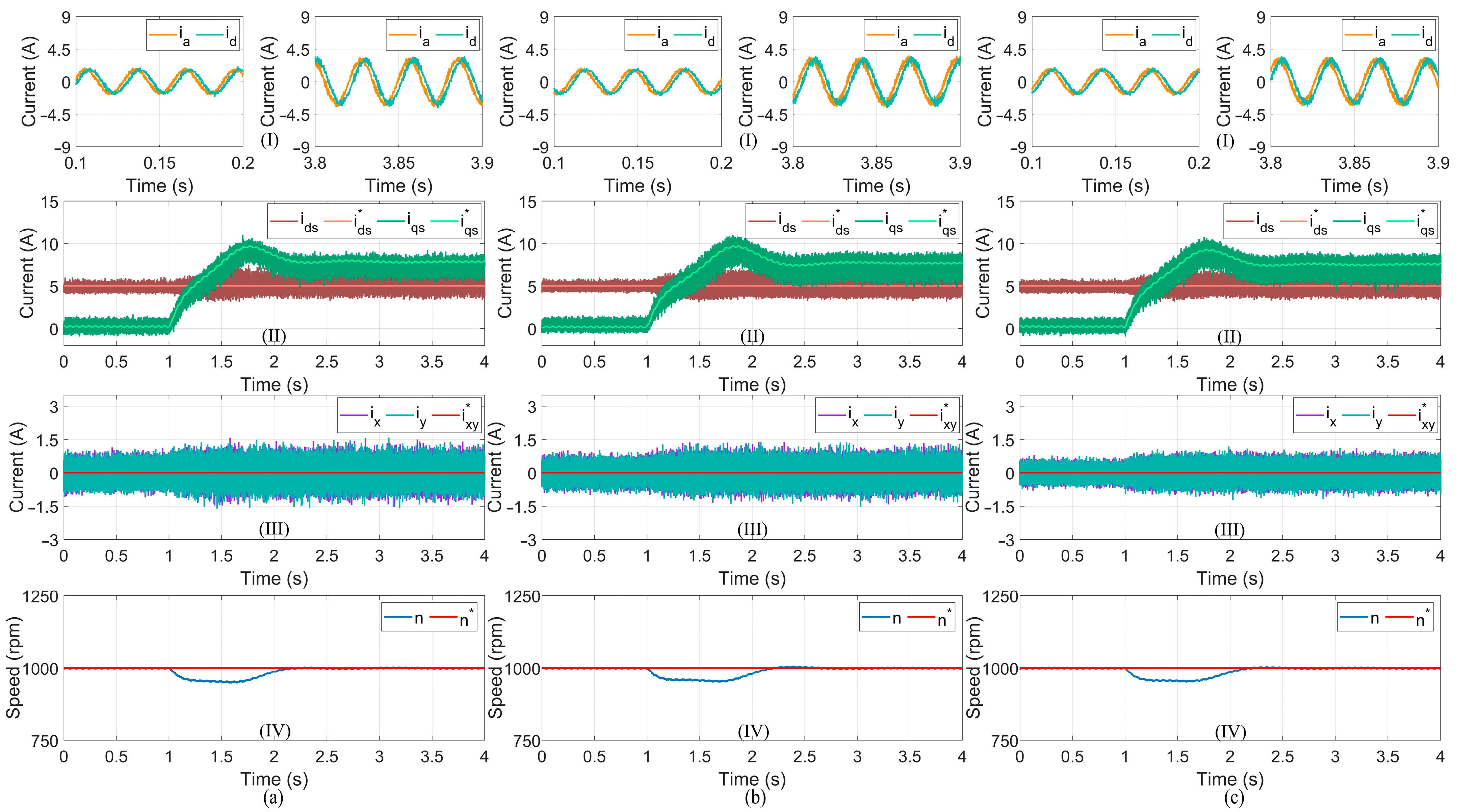
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controls | Speed (r/min) | Torque (Nm) | THD (%) | fsw (kHz) | σxy (A) | texe (µs) |
|---|---|---|---|---|---|---|
| HCC | 1000 | 7.4 | 23.5 | 2.3 | 1.374 | 19.72 |
| HPCC | 1000 | 7.4 | 13.2 | 4.2 | 0.600 | 21.48 |
| MPC49 | 1000 | 7.4 | 12.3 | 4.1 | 0.445 | 36.67 |
| MPC13 | 1000 | 7.4 | 13.2 | 3.3 | 0.400 | 24.47 |
| HMPCC | 1000 | 7.4 | 12.0 | 3.5 | 0.339 | 24.16 |
| Controls | Speed (r/min) | Torque (Nm) | THD (%) | fsw (kHz) | σxy (A) | texe (µs) |
|---|---|---|---|---|---|---|
| MPC49 | 300 | 1.5 | 7.4 | 6.1 | 0.167 | 36.67 |
| 600 | 1.5 | 8.6 | 4.2 | 0.203 | 36.65 | |
| 900 | 1.5 | 10.5 | 2.8 | 0.241 | 36.67 | |
| 1200 | 1.5 | 12.3 | 2.2 | 0.311 | 36.66 | |
| 1500 | 1.5 | 15.0 | 2.1 | 0.387 | 36.65 | |
| 300 | 3.4 | 8.6 | 6.1 | 0.195 | 36.67 | |
| 600 | 4.9 | 9.0 | 5.0 | 0.256 | 36.66 | |
| 900 | 6.7 | 8.9 | 3.8 | 0.319 | 36.67 | |
| 1200 | 8.6 | 8.6 | 3.1 | 0.387 | 36.66 | |
| 1500 | 10.6 | 8.3 | 2.5 | 0.454 | 36.66 | |
| MPC13 | 300 | 1.5 | 6.8 | 6.1 | 0.150 | 24.44 |
| 600 | 1.5 | 7.4 | 3.9 | 0.174 | 24.44 | |
| 900 | 1.5 | 8.6 | 2.6 | 0.215 | 24.45 | |
| 1200 | 1.5 | 11.5 | 2.1 | 0.312 | 24.43 | |
| 1500 | 1.5 | 14.5 | 2.0 | 0.379 | 24.42 | |
| 300 | 3.4 | 9.1 | 4.6 | 0.161 | 24.46 | |
| 600 | 4.9 | 9.4 | 3.5 | 0.221 | 24.45 | |
| 900 | 6.7 | 9.0 | 3.0 | 0.290 | 24.45 | |
| 1200 | 8.6 | 8.6 | 2.6 | 0.355 | 24.45 | |
| 1500 | 10.6 | 8.3 | 2.2 | 0.427 | 24.44 | |
| HMPCC | 300 | 1.5 | 6.8 | 4.5 | 0.119 | 24.18 |
| 600 | 1.5 | 7.4 | 3.5 | 0.146 | 24.10 | |
| 900 | 1.5 | 8.8 | 2.6 | 0.172 | 24.06 | |
| 1200 | 1.5 | 10.5 | 2.2 | 0.204 | 24.01 | |
| 1500 | 1.5 | 12.5 | 2.1 | 0.238 | 24.01 | |
| 300 | 3.4 | 8.7 | 4.1 | 0.137 | 24.15 | |
| 600 | 4.9 | 9.0 | 3.4 | 0.193 | 24.11 | |
| 900 | 6.7 | 8.7 | 3.0 | 0.244 | 24.10 | |
| 1200 | 8.6 | 8.4 | 2.7 | 0.290 | 24.07 | |
| 1500 | 10.6 | 8.0 | 2.4 | 0.330 | 24.05 |
| Controls | Speed (r/min) | Torque (Nm) | THD (%) | fsw (kHz) | σxy (A) | texe (µs) |
|---|---|---|---|---|---|---|
| MPC49 | 1000 | 1.5 | 14.3 | 2.8 | 0.274 | 36.64 |
| 1000 | 7.4 | 11.3 | 4.0 | 0.442 | ||
| MPC13 | 1000 | 1.5 | 12.7 | 2.5 | 0.254 | 24.45 |
| 1000 | 7.4 | 12.4 | 3.4 | 0.388 | ||
| HMPCC | 1000 | 1.5 | 12.4 | 2.3 | 0.184 | 24.09 |
| 1000 | 7.4 | 11.4 | 3.3 | 0.306 |
| Controls | Speed (r/min) | Torque (Nm) | THD (%) | fsw (kHz) | σxy (A) | texe (µs) |
|---|---|---|---|---|---|---|
| MPC49 | 1500 | 18.0 | 5.1 | 1.7 | 0.536 | 36.68 |
| MPC13 | 1500 | 18.0 | 4.9 | 1.6 | 0.503 | 24.45 |
| HMPCC | 1500 | 18.0 | 5.1 | 1.8 | 0.351 | 24.01 |
References
- Levi, E.; Barrero, F.; Duran, M.J. Multiphase Machines and Drives—Revisited. IEEE Trans. Ind. Electron. 2016, 63, 429–432. [Google Scholar] [CrossRef] [Green Version]
- Levi, E. Advances in Converter Control and Innovative Exploitation of Additional Degrees of Freedom for Multiphase Machines. IEEE Trans. Ind. Electron. 2016, 63, 433–448. [Google Scholar] [CrossRef] [Green Version]
- Serra, J.; Jlassi, I.; Cardoso, A.J.M. A Computationally Efficient Model Predictive Control of Six-Phase Induction Machines Based on Deadbeat Control. Machines 2021, 9, 306. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. Multi-Vector-Based Model Predictive Torque Control for a Six-Phase PMSM Motor with Fixed Switching Frequency. IEEE Trans. Energy Convers. 2019, 34, 1369–1379. [Google Scholar] [CrossRef]
- Aciego, J.J.; González Prieto, I.; Duran, M.J.; Bermudez, M.; Salas-Biedma, P. Model Predictive Control Based on Dynamic Voltage Vectors for Six-Phase Induction Machines. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 2710–2722. [Google Scholar] [CrossRef]
- Gonzalez-Prieto, A.; Martin, C.; González-Prieto, I.; Duran, M.J.; Carrillo-Ríos, J.; Aciego, J.J. Hybrid Multivector FCS–MPC for Six-Phase Electric Drives. IEEE Trans. Power Electron. 2022, 37, 8988–8999. [Google Scholar] [CrossRef]
- Che, H.S.; Abdel-Khalik, A.S.; Dordevic, O.; Levi, E. Parameter Estimation of Asymmetrical Six-Phase Induction Machines Using Modified Standard Tests. IEEE Trans. Ind. Electron. 2017, 64, 6075–6085. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Entrambasaguas, P.; González-Prieto, I.; Duran, M.J. Single-Index Open-Phase Fault Detection Method for Six-Phase Electric Drives. IEEE Trans. Ind. Electron. 2020, 67, 10233–10242. [Google Scholar] [CrossRef]
- Duran, M.J.; Levi, E.; Barrero, F. Multiphase Electric Drives: Introduction. In Wiley Encyclopedia of Electrical and Electronics Engineering; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2017; pp. 1–26. ISBN 978-0-471-34608-1. [Google Scholar]
- Paredes, J.; Prieto, B.; Satrústegui, M.; Elósegui, I.; González, P. Improving the Performance of a 1-MW Induction Machine by Optimally Shifting from a Three-Phase to a Six-Phase Machine Design by Rearranging the Coil Connections. IEEE Trans. Ind. Electron. 2021, 68, 1035–1045. [Google Scholar] [CrossRef]
- Wang, F.; Zhang, Z.; Mei, X.; Rodríguez, J.; Kennel, R. Advanced Control Strategies of Induction Machine: Field Oriented Control, Direct Torque Control and Model Predictive Control. Energies 2018, 11, 120. [Google Scholar] [CrossRef]
- Jlassi, I.; Marques Cardoso, A.J. Model Predictive Current Control of Synchronous Reluctance Motors, Including Saturation and Iron Losses. In Proceedings of the 2018 XIII International Conference on Electrical Machines (ICEM), Alexandroupoli, Greece, 3–6 September 2018; pp. 1598–1603. [Google Scholar]
- Jlassi, I.; Marques Cardoso, A.J. Lookup-Table-Based Model Predictive Torque Control Without Weighting Factors for PMSM Drives. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 1165–1170. [Google Scholar]
- Vazquez, S.; Rodriguez, J.; Rivera, M.; Franquelo, L.G.; Norambuena, M. Model Predictive Control for Power Converters and Drives: Advances and Trends. IEEE Trans. Ind. Electron. 2017, 64, 935–947. [Google Scholar] [CrossRef] [Green Version]
- Barrero, F.; Arahal, M.R.; Gregor, R.; Toral, S.; Duran, M.J. A Proof of Concept Study of Predictive Current Control for VSI-Driven Asymmetrical Dual Three-Phase AC Machines. IEEE Trans. Ind. Electron. 2009, 56, 1937–1954. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. A Simplified Model Predictive Control for a Dual Three-Phase PMSM With Reduced Harmonic Currents. IEEE Trans. Ind. Electron. 2018, 65, 9079–9089. [Google Scholar] [CrossRef]
- Luo, Y.; Liu, C. Elimination of Harmonic Currents Using a Reference Voltage Vector Based-Model Predictive Control for a Six-Phase PMSM Motor. IEEE Trans. Power Electron. 2019, 34, 6960–6972. [Google Scholar] [CrossRef]
- Cortes, P.; Kouro, S.; La Rocca, B.; Vargas, R.; Rodriguez, J.; Leon, J.I.; Vazquez, S.; Franquelo, L.G. Guidelines for Weighting Factors Design in Model Predictive Control of Power Converters and Drives. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Churchill, VIC, Australia, 10–13 February 2009; pp. 1–7. [Google Scholar]
- Yang, Y.; Pan, J.; Wen, H.; Zhang, X.; Wang, Y.; Perdikakis, W. Model Predictive Control with Autotuning Weighting Factors for Single-Phase Six-Level Hybrid-Clamped Converters. IEEE Trans. Ind. Electron. 2021, 68, 7946–7956. [Google Scholar] [CrossRef]
- Fretes, H.; Rodas, J.; Doval-Gandoy, J.; Gomez, V.; Gomez, N.; Novak, M.; Rodriguez, J.; Dragičević, T. Pareto Optimal Weighting Factor Design of Predictive Current Controller of a Six-Phase Induction Machine Based on Particle Swarm Optimization Algorithm. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 207–219. [Google Scholar] [CrossRef]
- Zhao, Y.; Lipo, T.A. Space Vector PWM Control of Dual Three-Phase Induction Machine Using Vector Space Decomposition. IEEE Trans. Ind. Appl. 1995, 31, 1100–1109. [Google Scholar] [CrossRef]
- Jun, L.; Dazhi, W. Study and Simulation of a Novel Hysteresis Current Control Strategy. In Proceedings of the 2009 Second International Conference on Intelligent Computation Technology and Automation, Changsha, China, 10–11 October 2009; Volume 2, pp. 306–309. [Google Scholar]
- Mishra, T.; Devanshu, A.; Kumar, N.; Kulkarni, A.R. Comparative Analysis of Hysteresis Current Control and SVPWM on Fuzzy Logic Based Vector Controlled Induction Motor Drive. In Proceedings of the 2016 IEEE 1st International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 4–6 July 2016; pp. 1–6. [Google Scholar]
- Palaniappan, R.G.; Vithayathil, J. A Control Strategy for Reference Wave Adaptive Current Generation. IEEE Trans. Ind. Electron. Control. Instrum. 1980, IECI-27, 92–96. [Google Scholar] [CrossRef]
- Martín, C.; Arahal, M.R.; Barrero, F.; Durán, M.J. Five-Phase Induction Motor Rotor Current Observer for Finite Control Set Model Predictive Control of Stator Current. IEEE Trans. Ind. Electron. 2016, 63, 4527–4538. [Google Scholar] [CrossRef]
- Durán, M.J.; Gonzalez-Prieto, I.; Gonzalez-Prieto, A. Large Virtual Voltage Vectors for Direct Controllers in Six-Phase Electric Drives. Int. J. Electr. Power Energy Syst. 2021, 125, 106425. [Google Scholar] [CrossRef]
- Mesai Ahmed, H.; Jlassi, I.; Marques Cardoso, A.J.; Bentaallah, A. Model-Free Predictive Current Control of Synchronous Reluctance Motors Based on a Recurrent Neural Network. IEEE Trans. Ind. Electron. 2022, 69, 10984–10992. [Google Scholar] [CrossRef]











| Parameters | Values |
|---|---|
| Power () | 7.5 |
| DC-Link Voltage () | 300 |
| Ipeak () | 8.35 |
| 1500 | |
| 1.03 | |
| 0.8208 | |
| 0.199 | |
| 0.0059 | |
| 0.0059 | |
| 0.01 |
| DTC | FOC | PCC49 | HMPCC | |
|---|---|---|---|---|
| Tuning Parameters | 4 | 10 | 3 | 3 |
| Internal Controller | 2 Hysteresis | 4 PI | 1 Cost Function | 6 Hysteresis and 1 Cost Function |
| Fixed Switching Frequency | No | Yes | No | No |
| System Constraints Inclusion | Difficult | Difficult | Easy | Easy |
| Harmonic Distortion Regulation | Bad | Medium | Very Good | Very Good |
| System Dynamics | Fast | Slow | Fast | Fast |
| Average Execution Time | 20.4 µs | 18.8 µs | 36.7 µs | 24.2 µs |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Serra, J.; Cardoso, A.J.M. A Simplified Model Predictive Control for Asymmetrical Six-Phase Induction Motors That Eliminates the Weighting Factor. Machines 2022, 10, 1189. https://doi.org/10.3390/machines10121189
Serra J, Cardoso AJM. A Simplified Model Predictive Control for Asymmetrical Six-Phase Induction Motors That Eliminates the Weighting Factor. Machines. 2022; 10(12):1189. https://doi.org/10.3390/machines10121189
Chicago/Turabian StyleSerra, João, and Antonio J. Marques Cardoso. 2022. "A Simplified Model Predictive Control for Asymmetrical Six-Phase Induction Motors That Eliminates the Weighting Factor" Machines 10, no. 12: 1189. https://doi.org/10.3390/machines10121189
APA StyleSerra, J., & Cardoso, A. J. M. (2022). A Simplified Model Predictive Control for Asymmetrical Six-Phase Induction Motors That Eliminates the Weighting Factor. Machines, 10(12), 1189. https://doi.org/10.3390/machines10121189