
Parameter Estimation for Robotic Manipulator Systems †




Abstract
:1. Introduction
2. Problem Formulation
3. Main Results
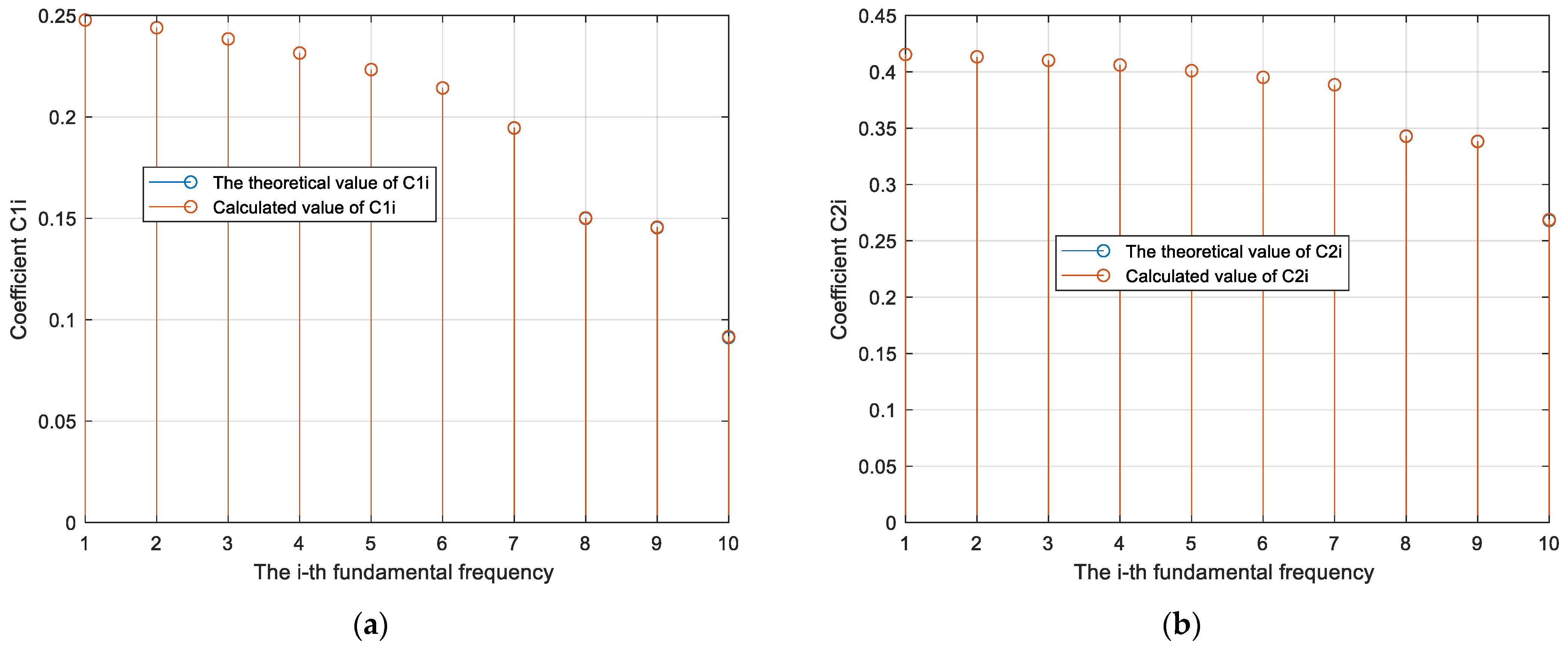
3.1. Estimation of Steady State Coefficients
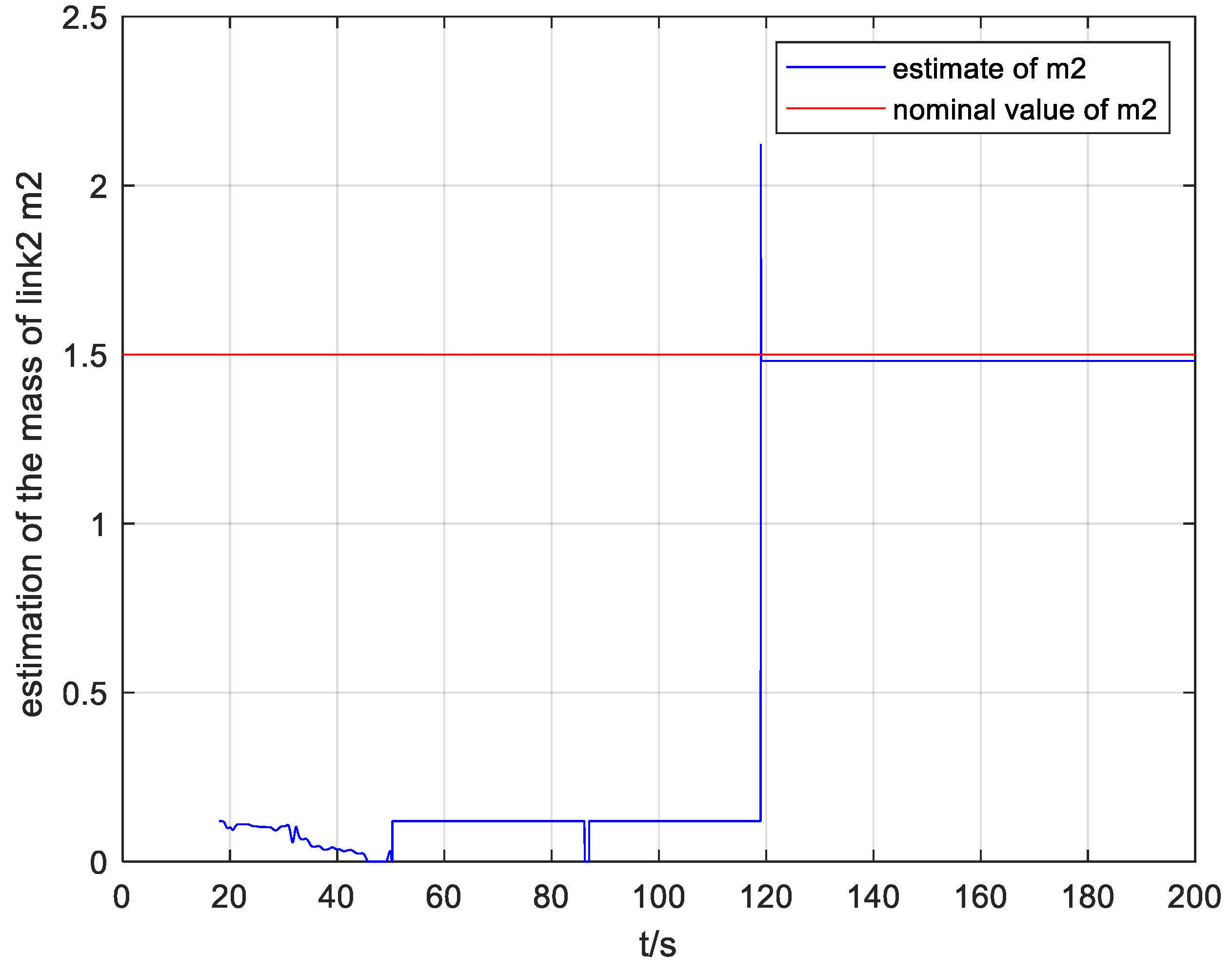
3.2. Estimation of Unknown Dynamic Parameters
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tereshchuk, V.; Stewart, J.; Bykov, N.; Pedigo, S.; Devasia, S.; Banerjee, A.G. An efficient scheduling algorithm for multi-robot task allocation in assembling aircraft structures. IEEE Robot. Autom. Lett. 2019, 4, 3844–3851. [Google Scholar] [CrossRef] [Green Version]
- Asadi, E.; Li, B.; Chen, I.M. Pictobot: A cooperative painting robot for interior finishing of industrial developments. IEEE Robot. Autom. Mag. 2018, 25, 82–94. [Google Scholar] [CrossRef]
- Wang, X.; Shi, Y.; Ding, D.; Gu, X. Double global optimum genetic algorithm–particle swarm optimization-based welding robot path planning. Eng. Optim. 2016, 48, 299–316. [Google Scholar] [CrossRef]
- Zhihong, M.; Paplinski, A.P.; Wu, H.R. A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators. IEEE Trans. Autom. Control. 1994, 39, 2464–2469. [Google Scholar] [CrossRef]
- Yu, X.; Man, Z. Terminal sliding mode observers for a class of nonlinear systems. Automatica 2010, 46, 1401–1404. [Google Scholar]
- Atkeson, C.G.; An, C.H.; Hollerbach, J.M. Estimation of inertial parameters of manipulator loads and links. Int. J. Robot. Res. 1986, 5, 101–119. [Google Scholar] [CrossRef]
- Yu, S.; Yu, X.; Shirinzadeh, B.; Man, Z. Continuous finite-time control for robotic manipulators with terminal sliding mode. Automatica 2005, 41, 1957–1964. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159–2167. [Google Scholar] [CrossRef]
- Nubert, J.; Köhler, J.; Berenz, V.; Allgöwer, F.; Trimpe, S. Safe and fast tracking on a robot manipulator: Robust mpc and neural network control. IEEE Robot. Autom. Lett. 2020, 5, 3050–3057. [Google Scholar] [CrossRef] [Green Version]
- Ali, K.; Ullah, S.; Mehmood, A.; Mostafa, H.; Marey, M.; Iqbal, J. Adaptive FIT-SMC Approach for an Anthropomorphic Manipulator with Robust Exact Differentiator and Neural Network-Based Friction Compensation. IEEE Access 2022, 10, 3378–3389. [Google Scholar] [CrossRef]
- Ullah, S.; Khan, Q.; Mehmood, A.; Kirmani, S.A.M.; Mechali, O. Neuro-adaptive fast integral terminal sliding mode control design with variable gain robust exact differentiator for under-actuated quadcopter UAV. ISA Trans. 2022, 120, 293–304. [Google Scholar] [CrossRef] [PubMed]
- Thomas, M.J.; George, S.; Sreedharan, D.; Joy, M.; Sudheer, A. Dynamic modeling, system identification and comparative study of various control strategies for a spatial parallel manipulator. Proceedings of the Institution of Mechanical Engineers, Part I. J. Syst. Control. Eng. 2022, 236, 270–293. [Google Scholar]
- Danesh, M.; Sheikholeslam, F.; Keshmiri, M. An adaptive manipulator controller based on force and parameter estimation. IEICE Transactions on Fundamentals of Electronics. Commun. Comput. Sci. 2006, 89, 2803–2811. [Google Scholar]
- Yang, C.; Jiang, Y.; He, W.; Na, J.; Li, Z.; Xu, B. Adaptive parameter estimation and control design for robot manipulators with finite-time convergence. IEEE Trans. Ind. Electron. 2018, 65, 8112–8123. [Google Scholar] [CrossRef]
- Na, J.; Mahyuddin, M.N.; Herrmann, G.; Ren, X.; Barber, P. Robust adaptive finite-time parameter estimation and control for robotic systems. Int. J. Robust Nonlinear Control 2015, 25, 3045–3071. [Google Scholar] [CrossRef] [Green Version]
- Mohanty, A.; Yao, B. Indirect adaptive robust control of hydraulic manipulators with accurate parameter estimates. IEEE Trans. Control. Syst. Technol. 2010, 19, 567–575. [Google Scholar] [CrossRef]
- Gautier, M.; Janot, A.; Vandanjon, P.O. A new closed-loop output error method for parameter identification of robot dynamics. IEEE Trans. Control. Syst. Technol. 2012, 21, 428–444. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.-P.; Ma, Z.-Y.; Chen, J.-L.; Cao, J.-F.; Fu, Y.; Li, S.-Q. An improved parameter identification method of redundant manipulator. Int. J. Adv. Robot. Syst. 2021, 18, 17298814211002118. [Google Scholar] [CrossRef]
- Guo, Q.; Chen, Z.; Shi, Y.; Liu, G. Model identification and parametric adaptive control of hydraulic manipulator with neighborhood field optimization. IET Control. Theory Appl. 2021, 15, 1599–1614. [Google Scholar] [CrossRef]
- De Souza, D.A.; Batista, J.G.; Vasconcelos, F.J.S.; Dos Reis, L.L.N.; Machado, G.F.; Costa, J.R.; Junior, J.N.N.; Silva, J.L.N.; Rios, C.S.N.; Junior, A.B.S. Identification by Recursive Least Squares With Kalman Filter (RLS-KF) Applied to a Robotic Manipulator. IEEE Access 2021, 9, 63779–63789. [Google Scholar] [CrossRef]
- Batista, J.; Souza, D.; Dos Reis, L.; Barbosa, A.; Araújo, R. Dynamic model and inverse kinematic identification of a 3-DOF manipulator using RLSPSO. Sensors 2020, 20, 416. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, J.; Wang, J.; You, Z. An overview of dynamic parameter identification of robots. Robot. Comput. Integr. Manuf. 2010, 26, 414–419. [Google Scholar]
- Pradhan, S.K.; Subudhi, B. Position control of a flexible manipulator using a new nonlinear self-tuning PID controller. IEEE/CAA J. Autom. Sin. 2018, 7, 136–149. [Google Scholar] [CrossRef]
- Shang, W.; Cong, S.; Kong, F. Identification of dynamic and friction parameters of a parallel manipulator with actuation redundancy. Mechatronics 2010, 20, 192–200. [Google Scholar] [CrossRef]
- Urrea, C.; Pascal, J. Parameter identification methods for real redundant manipulators. J. Appl. Res. Technol. 2017, 15, 320–331. [Google Scholar] [CrossRef]
- Jia, J.; Zhang, M.; Zang, X.; Zhang, H.; Zhao, J. Dynamic parameter identification for a manipulator with joint torque sensors based on an improved experimental design. Sensors 2019, 19, 2248. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Klimchik, A.; Furet, B.; Caro, S.; Pashkevich, A. Identification of the manipulator stiffness model parameters in industrial environment. Mech. Mach. Theory 2015, 90, 1–22. [Google Scholar] [CrossRef] [Green Version]
- Du, G.; Zhang, P. Online serial manipulator calibration based on multisensory process via extended Kalman and particle filters. IEEE Trans. Ind. Electron. 2014, 61, 6852–6859. [Google Scholar]
- Partovibakhsh, M.; Liu, G. An adaptive unscented Kalman filtering approach for online estimation of model parameters and state-of-charge of lithium-ion batteries for autonomous mobile robots. IEEE Trans. Control. Syst. Technol. 2014, 23, 357–363. [Google Scholar] [CrossRef]
- Castañeda, C.E.; Esquivel, P. Decentralized neural identifier and control for nonlinear systems based on extended Kalman filter. Neural Netw. 2012, 31, 81–87. [Google Scholar] [CrossRef]
- Nguyen, H.N.; Zhou, J.; Kang, H.J. A calibration method for enhancing robot accuracy through integration of an extended Kalman filter algorithm and an artificial neural network. Neurocomputing 2015, 151, 996–1005. [Google Scholar] [CrossRef]
- Song, S.; Dai, X.; Huang, Z.; Gong, D. Load parameter identification for parallel robot manipulator based on extended Kalman filter. Complexity 2020, 2020, 8816374. [Google Scholar] [CrossRef]
- Cantelli, L.; Muscato, G.; Nunnari, M.; Spina, D. A joint-angle estimation method for industrial manipulators using inertial sensors. IEEE/ASME Trans. Mechatron. 2015, 20, 2486–2495. [Google Scholar] [CrossRef]
- Nguyen, H.-N.; Zhou, J.; Kang, H.-J.; Ro, Y.-S. Robot Geometric Parameter Identification with Extended Kalman Filtering Algorithm. International Conference on Intelligent Computing; Springer: Berlin/Heidelberg, Germany, 2013; pp. 165–170. [Google Scholar]
- Jiang, Z.; Zhou, W.; Li, H.; Mo, Y.; Ni, W.; Huang, Q. A new kind of accurate calibration method for robotic kinematic parameters based on the extended Kalman and particle filter algorithm. IEEE Trans. Ind. Electron. 2017, 65, 3337–3345. [Google Scholar] [CrossRef]
- Zhong, X.; Zhong, X.; Peng, X. Robust Kalman filtering cooperated Elman neural network learning for vision-sensing-based robotic manipulation with global stability. Sensors 2013, 13, 13464–13486. [Google Scholar] [CrossRef] [Green Version]
- Urrea, C.; Pascal, J. Design, simulation, comparison and evaluation of parameter identification methods for an industrial robot. Comput. Electr. Eng. 2018, 67, 791–806. [Google Scholar] [CrossRef]
- Muradore, R.; Fiorini, P. A PLS-based statistical approach for fault detection and isolation of robotic manipulators. IEEE Trans. Ind. Electron. 2011, 59, 3167–3175. [Google Scholar] [CrossRef]
- Zhu, Q.; Man, Z.; Cao, Z.; Zheng, J.; Wang, H. Parameter Estimation of Robotic Manipulator in Frequency Domain. In Proceedings of the 2021 International Conference on Advanced Mechatronic Systems (ICAMechS), Tokyo, Japan, 9–12 December 2021. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| 5 | |
| 1.5 | |
| 5 | |
| 5 | |
| 1 | |
| 0.8 |
| Component | Frequency | Amplitude |
|---|---|---|
| 1 | 0.2 | |
| 2 | 1.5 | |
| 3 | 0.3 | |
| 4 | 0.5 | |
| 5 | 0.7 | |
| 6 | 0.8 | |
| 7 | 1.0 | |
| 8 | 1.2 | |
| 9 | 1.4 | |
| 10 | 2.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, Q.; Man, Z.; Cao, Z.; Zheng, J.; Wang, H. Parameter Estimation for Robotic Manipulator Systems. Machines 2022, 10, 392. https://doi.org/10.3390/machines10050392
Zhu Q, Man Z, Cao Z, Zheng J, Wang H. Parameter Estimation for Robotic Manipulator Systems. Machines. 2022; 10(5):392. https://doi.org/10.3390/machines10050392
Chicago/Turabian StyleZhu, Qianfeng, Zhihong Man, Zhenwei Cao, Jinchuan Zheng, and Hai Wang. 2022. "Parameter Estimation for Robotic Manipulator Systems" Machines 10, no. 5: 392. https://doi.org/10.3390/machines10050392
APA StyleZhu, Q., Man, Z., Cao, Z., Zheng, J., & Wang, H. (2022). Parameter Estimation for Robotic Manipulator Systems. Machines, 10(5), 392. https://doi.org/10.3390/machines10050392