
An IPMSM Control Structure Based on a Model Reference Adaptive Algorithm



Abstract
:1. Introduction
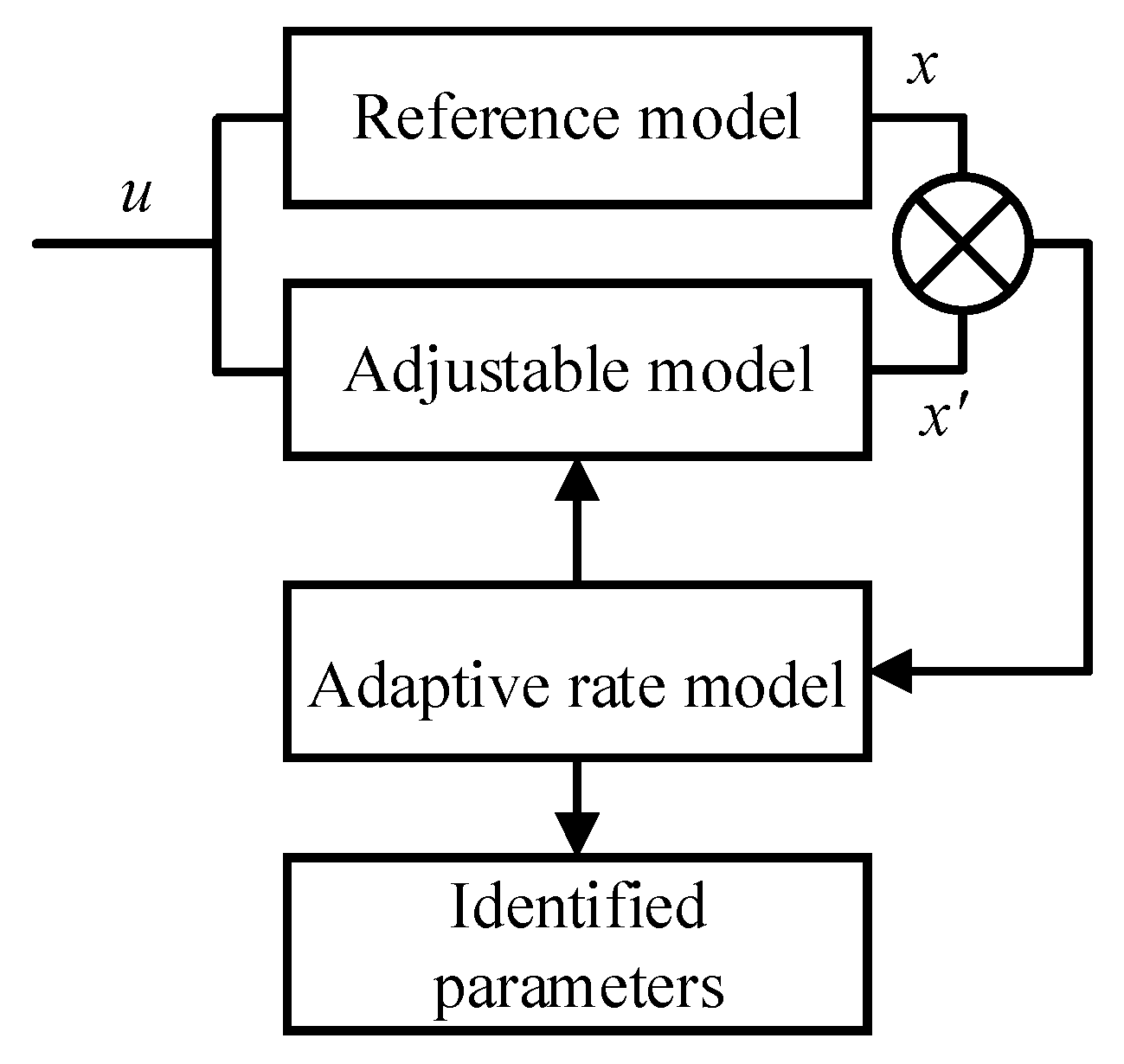
2. Principle of MRAA for Parameter Identification
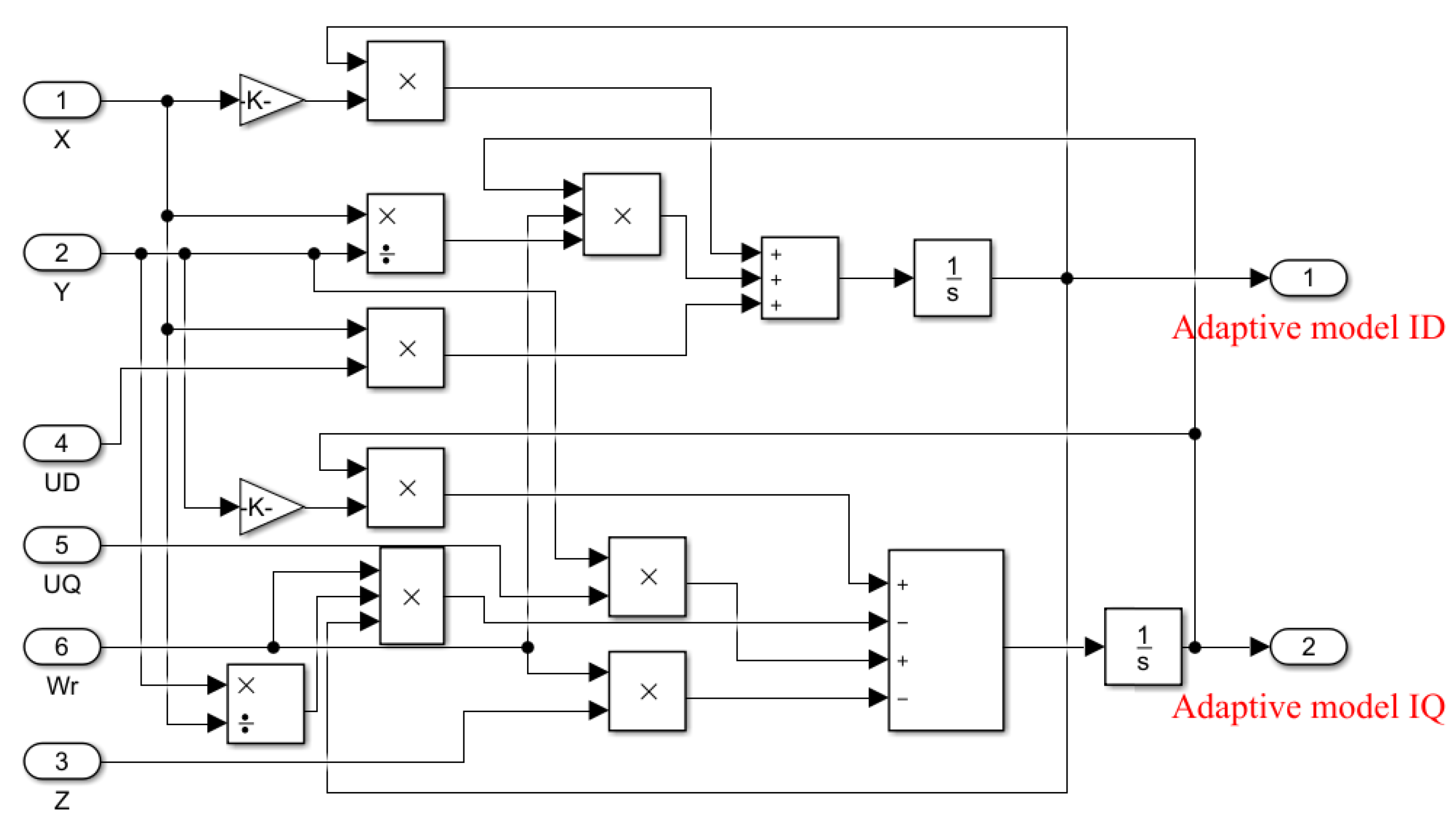
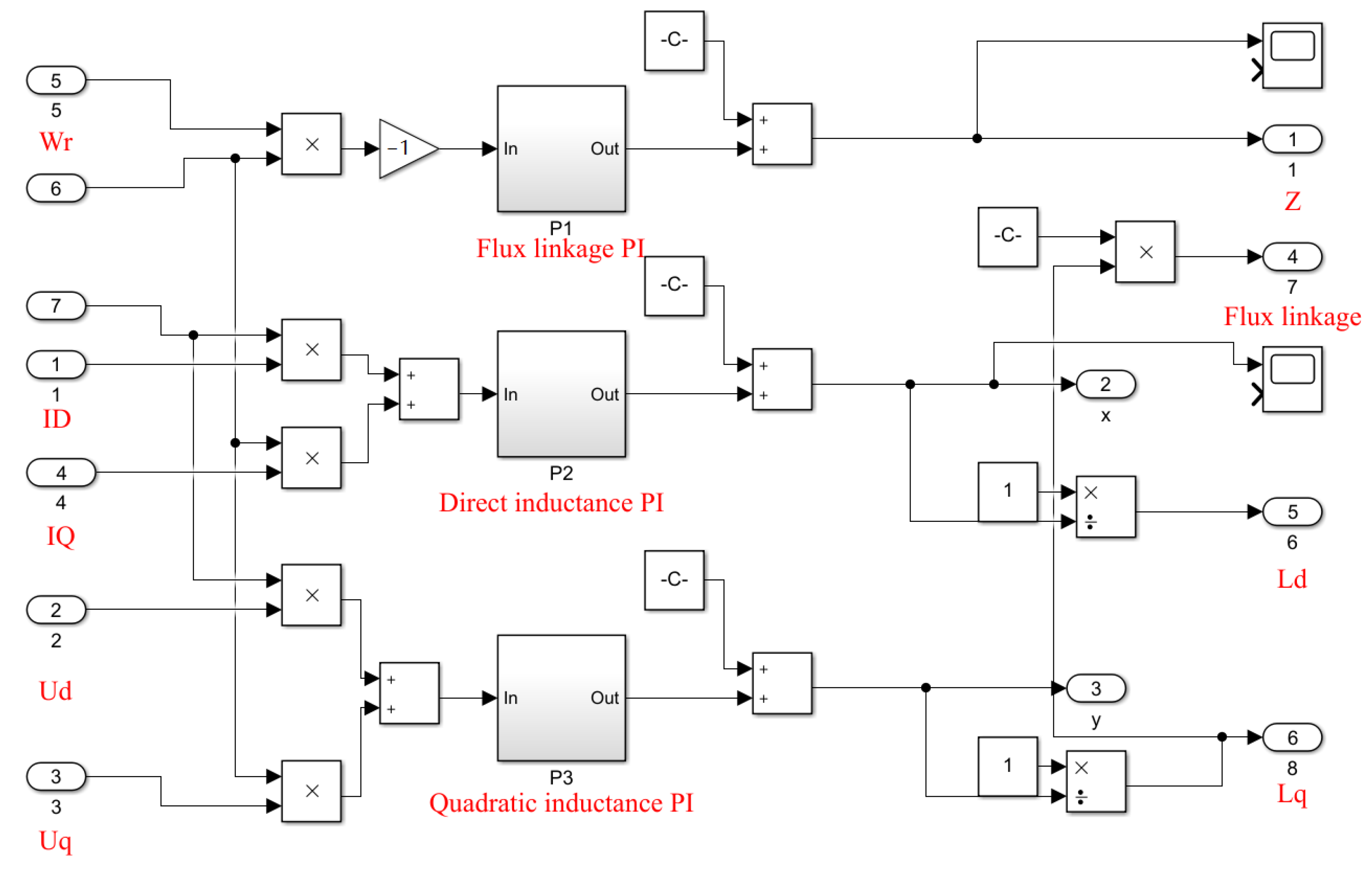
2.1. MRAA for IPMSM
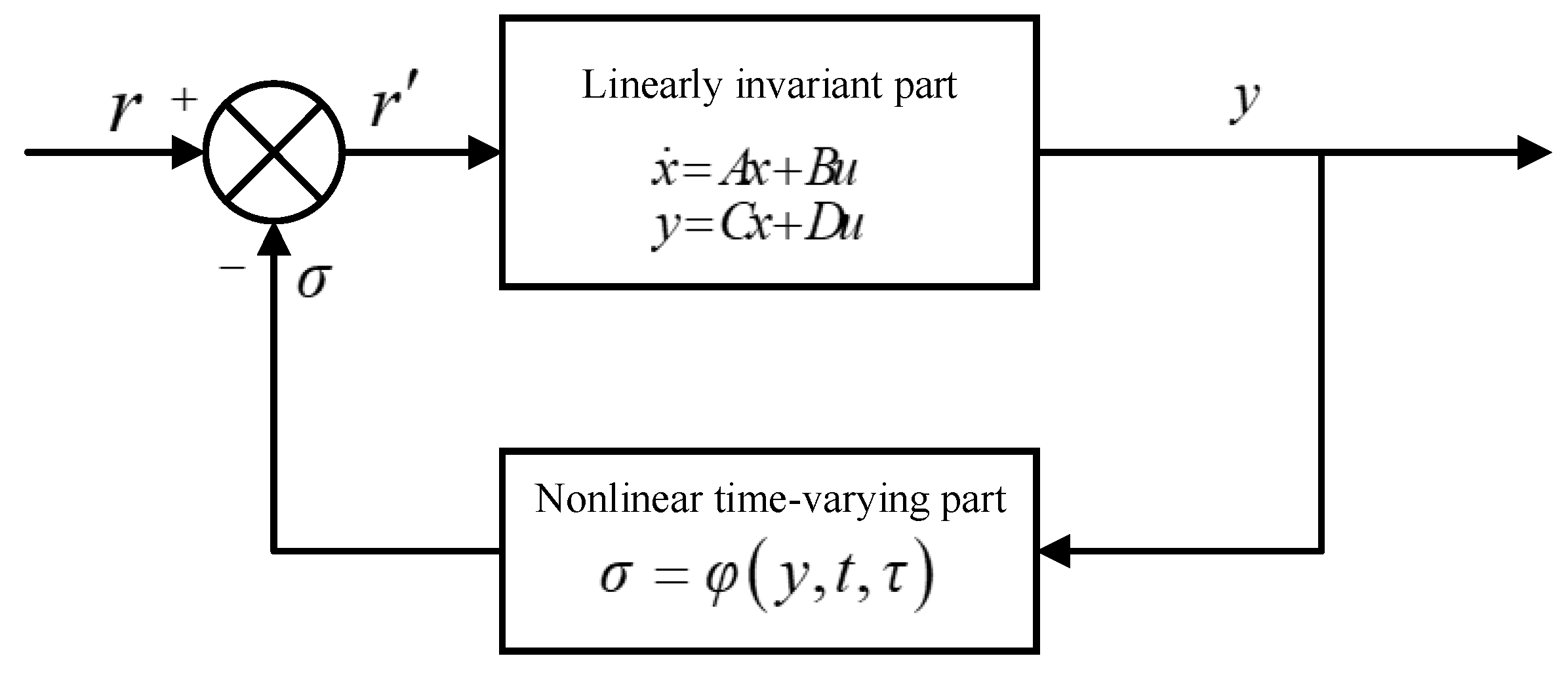
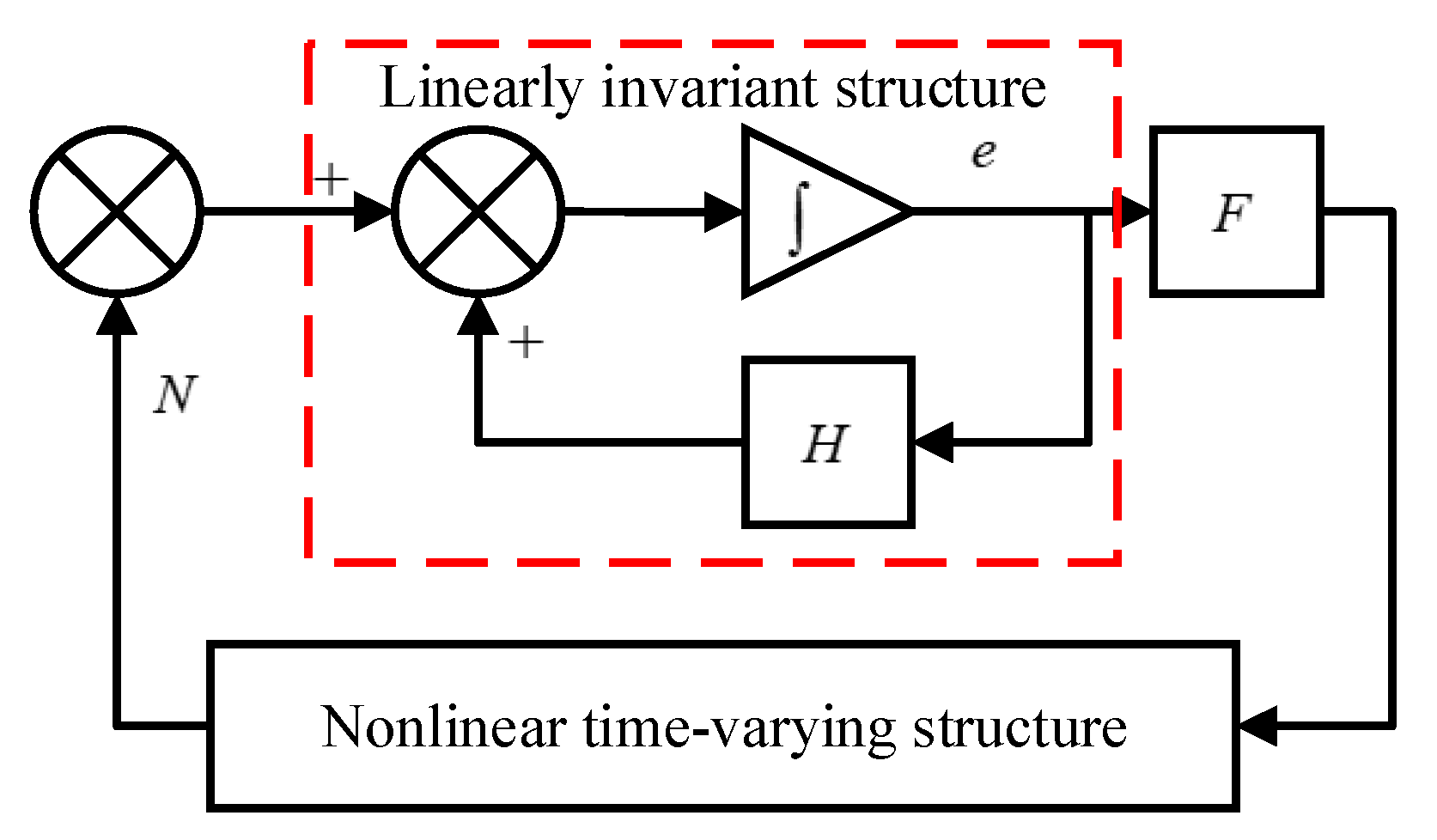
2.2. Popov Stability Judgment
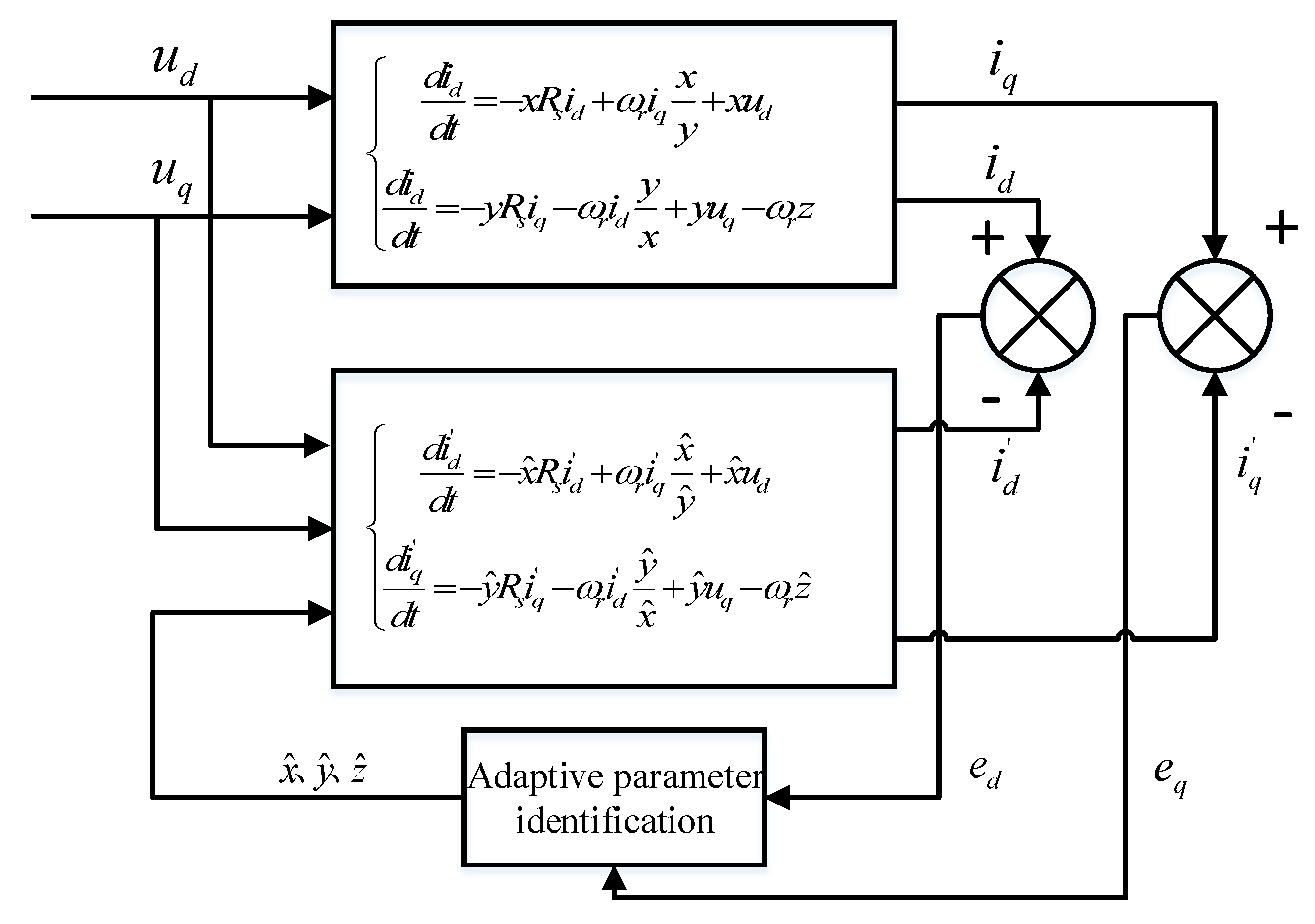
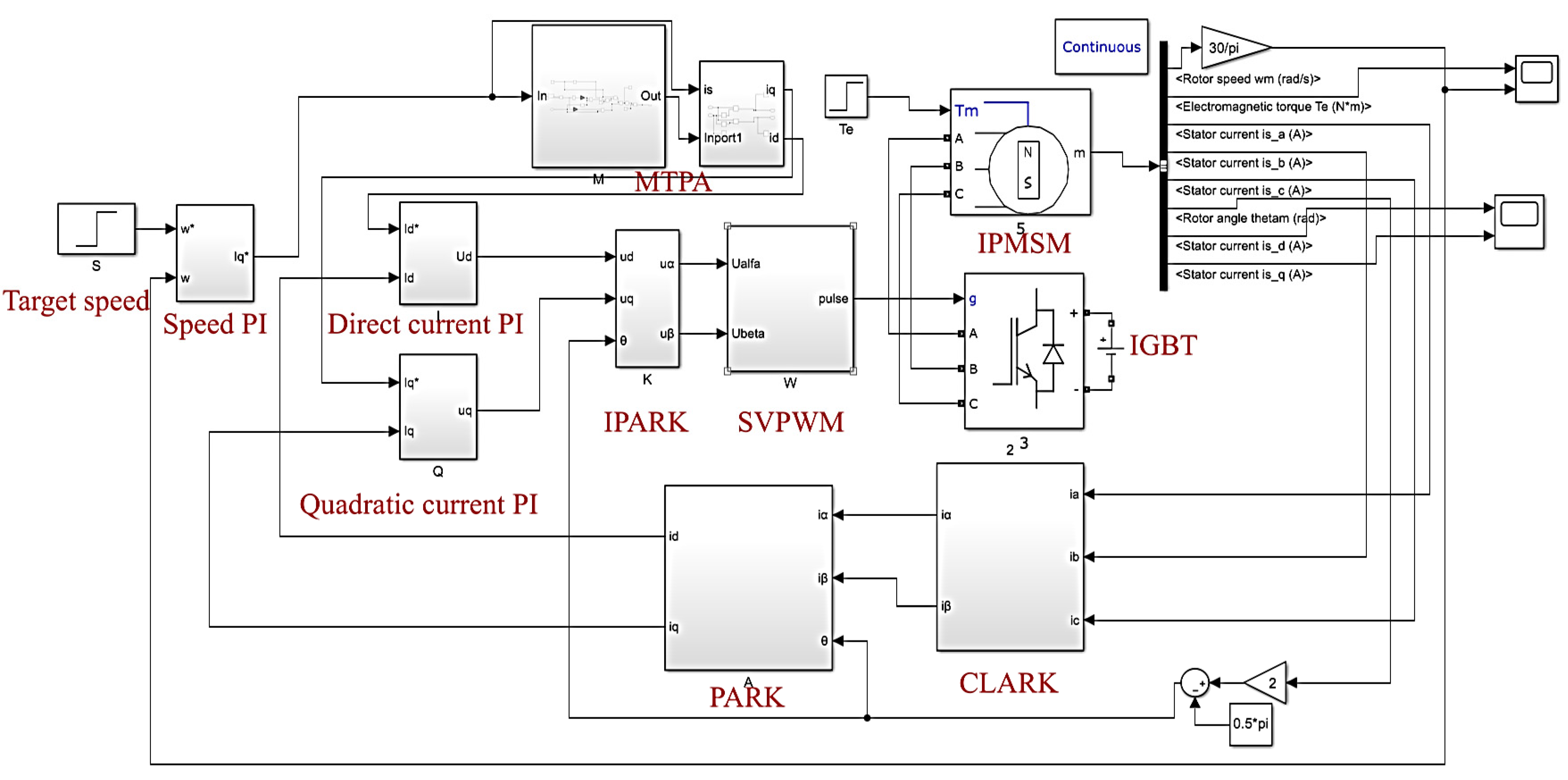
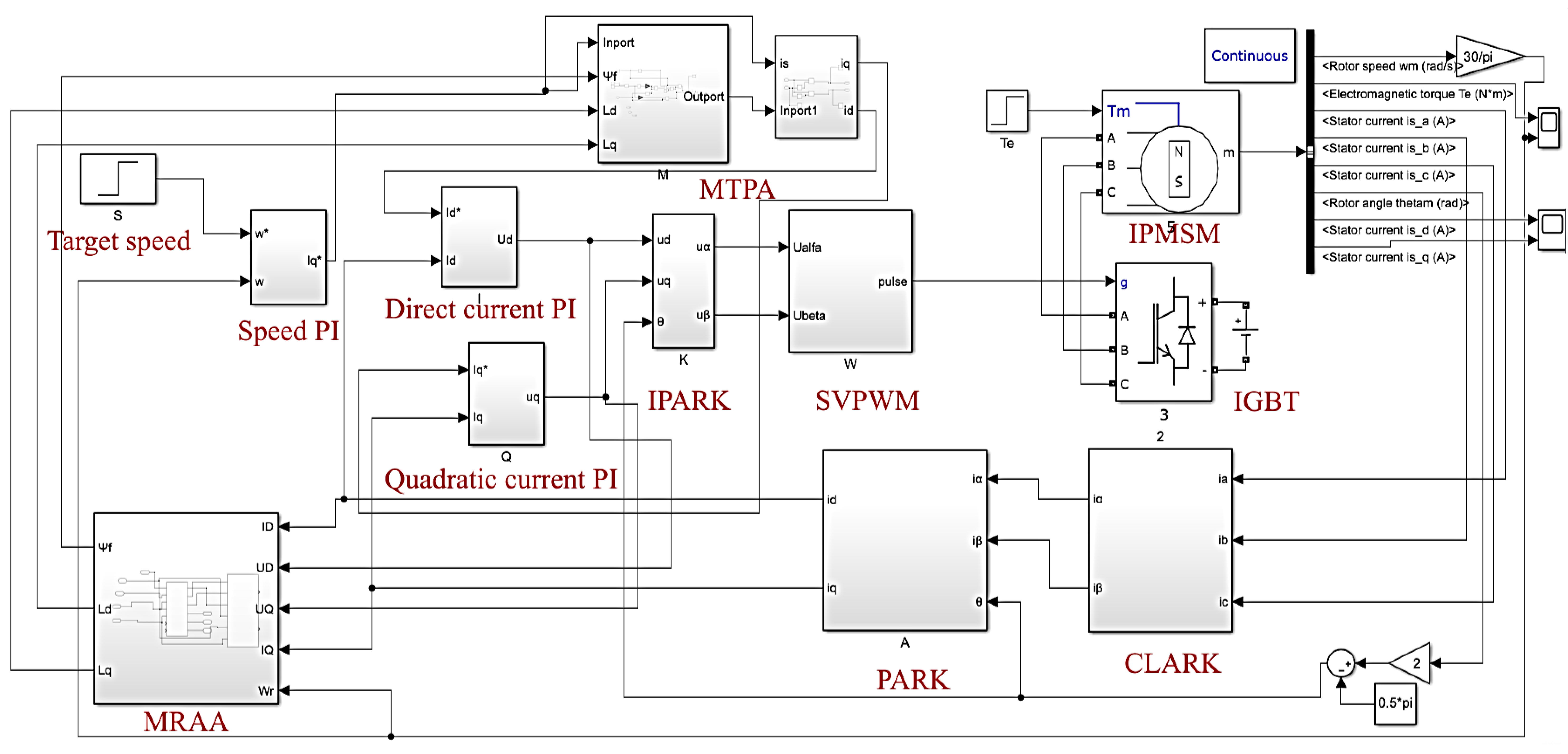
3. IPMSM Control Based on the MRAA
- (1)
- The three-phase windings of the stator are symmetrical, with a space difference of a 120° electrical angle;
- (2)
- Ignoring the influence of the saturation of the motor magnetic circuit and the loss of the iron core, the motor magnetic circuit is regarded as a linear system;
- (3)
- Ignoring the high-order harmonics, the stator potential changes according to sinusoidal law, and the magnetic field generated by the stator current in the air gap is distributed according to sinusoidal law;
- (4)
- The winding damping of the rotor can be ignored.
4. Simulation Research
4.1. Model Construction
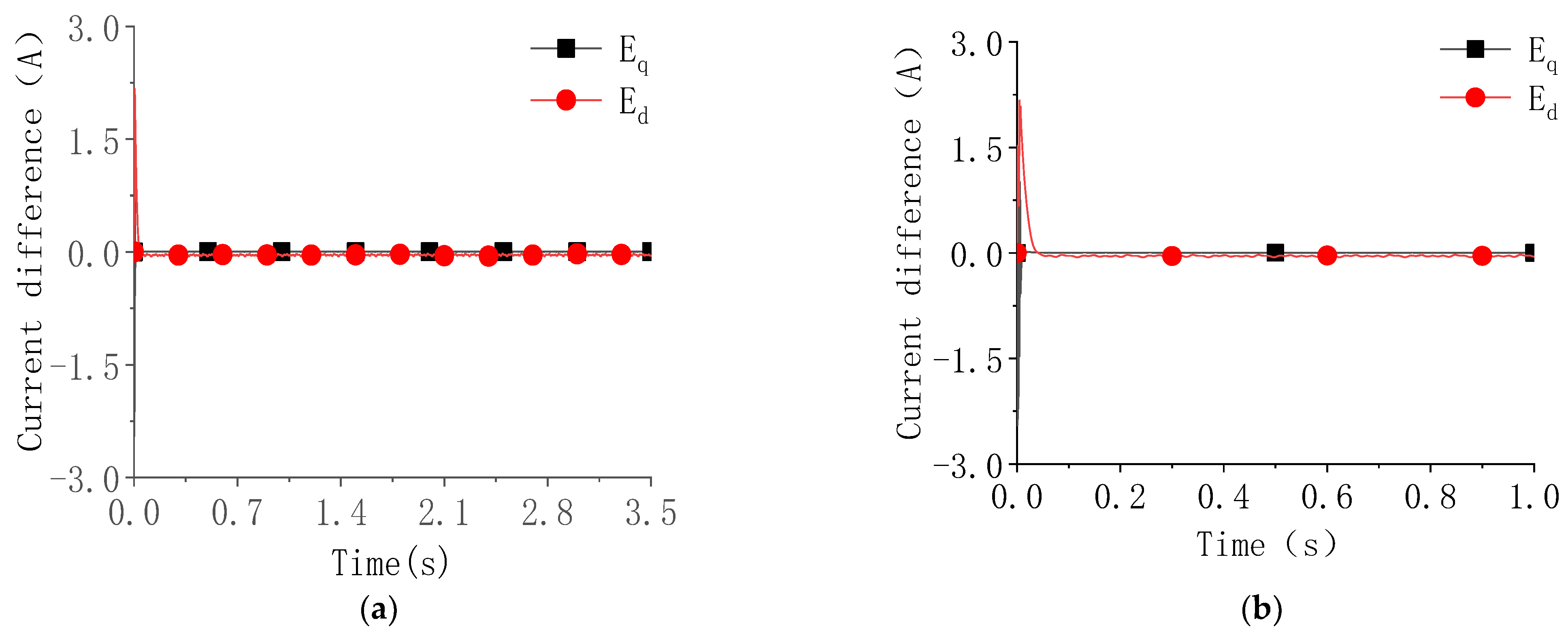
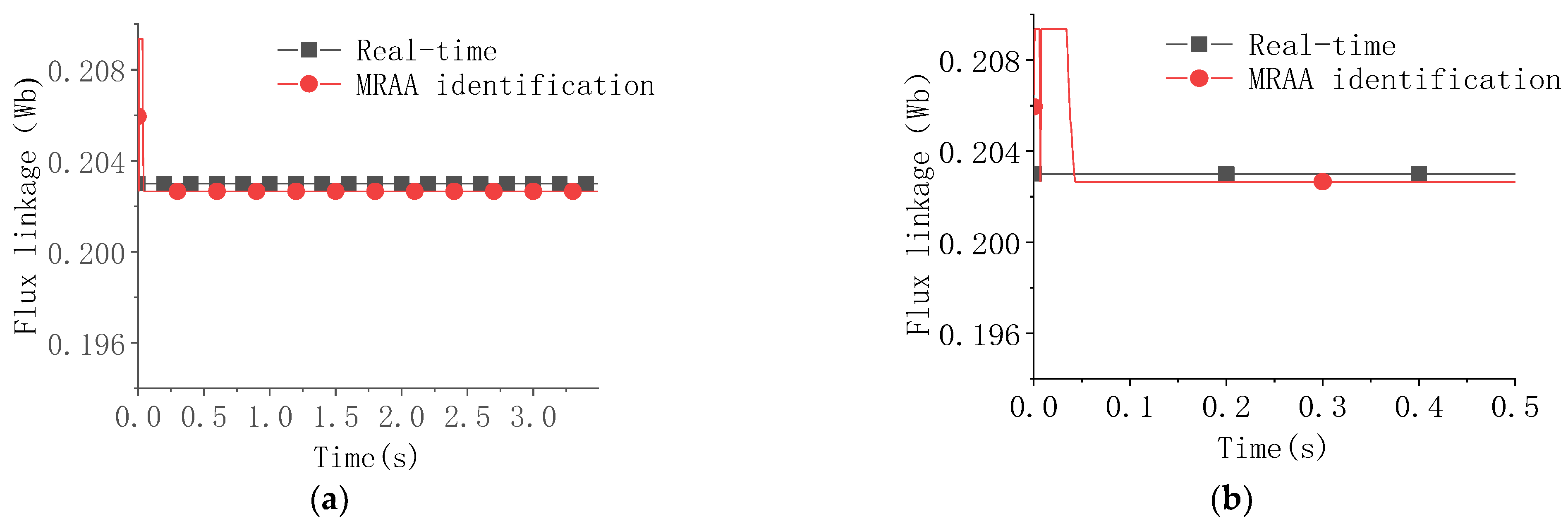
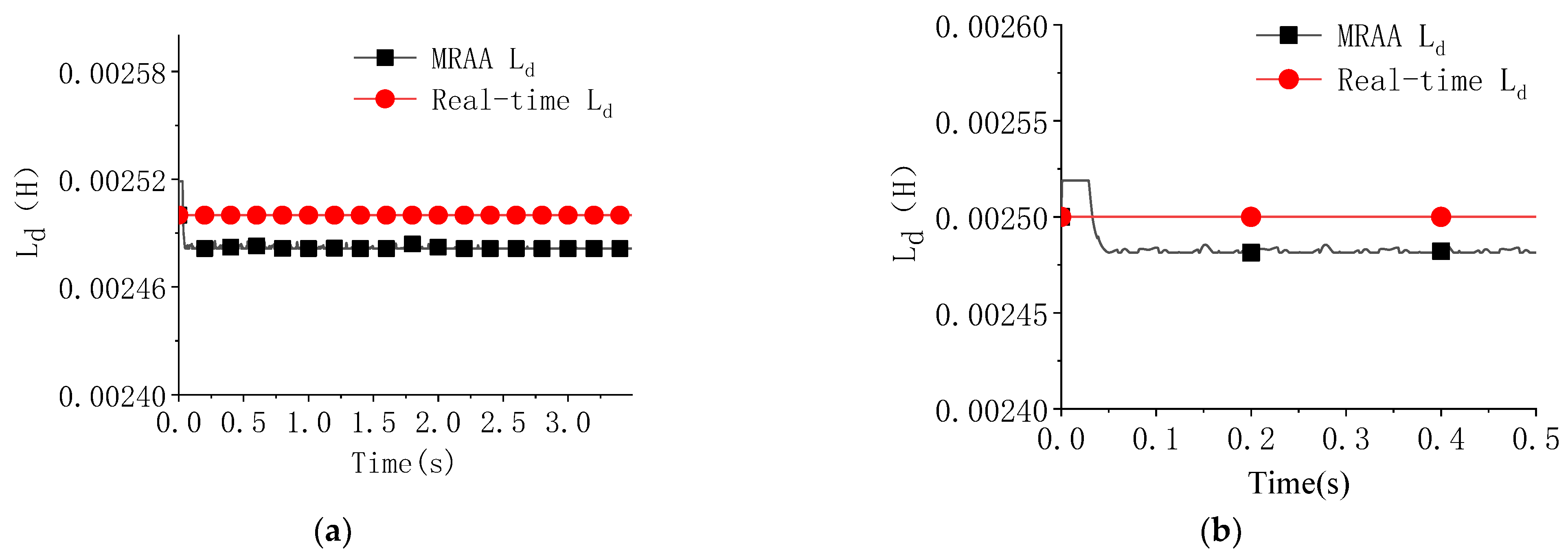
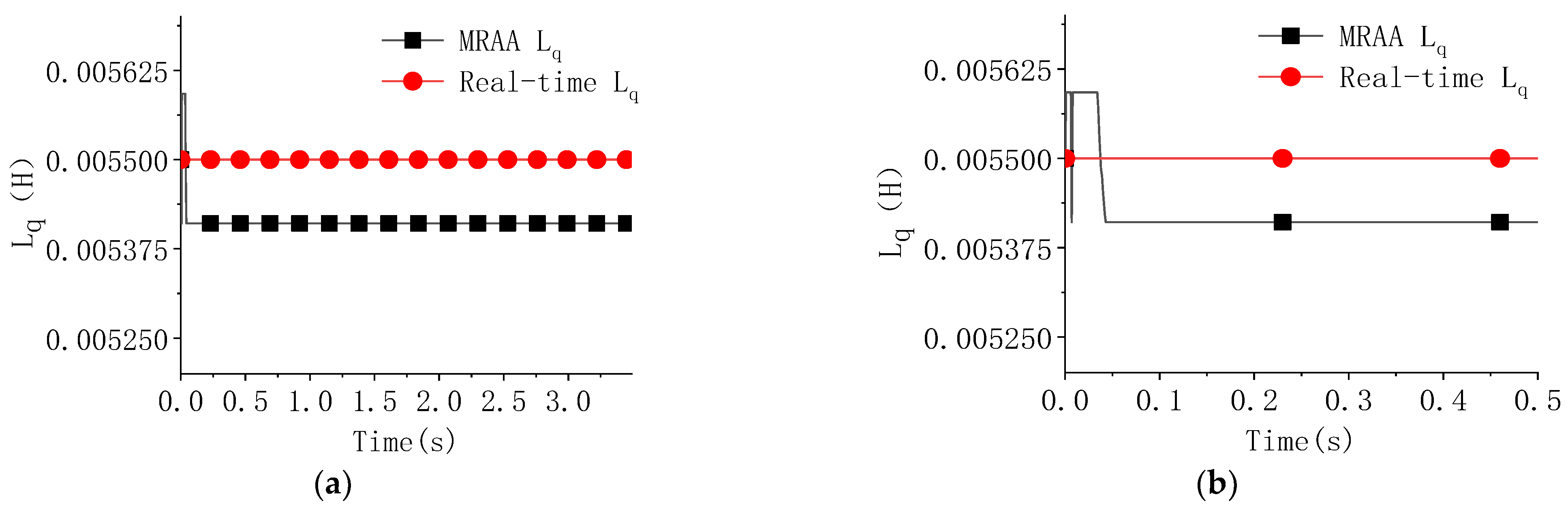
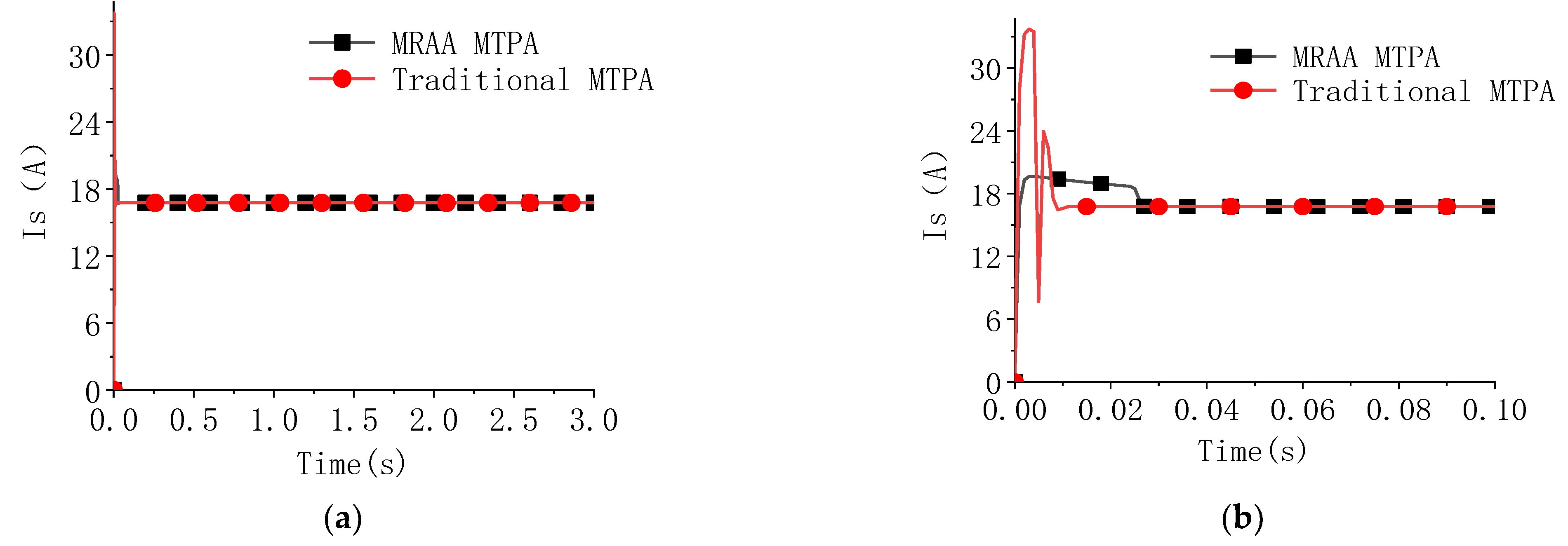
4.2. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, T.; Lin, Y.; Ren, H.; Chen, H.; Chen, Q.; Li, Z. Development and key technologies of pure electric construction machinery. Renew. Sustain. Energy Rev. 2020, 132, 110080. [Google Scholar] [CrossRef]
- Lin, T.; Chen, Q.; Ren, H.; Huang, W.; Chen, Q.; Fu, S. Review of boom potential energy regeneration technology for hydraulic construction machinery. Renew. Sustain. Energy Rev. 2017, 79, 358–371. [Google Scholar] [CrossRef]
- Tong, Z.-M.; Miao, J.-Z.; Li, Y.-S.; Tong, S.-G.; Zhang, Q.; Tan, G.-R. Development of electric construction machinery in China: A review of key technologies and future directions. J. Zhejiang Univ. -Sci. A 2021, 22, 245–264. [Google Scholar] [CrossRef]
- Zhang, S.; Minav, T.; Pietola, M.; Kauranne, H.; Kajaste, J. The effects of control methods on energy efficiency and position tracking of an electro-hydraulic excavator equipped with zonal hydraulics. Autom. Constr. 2019, 100, 129–144. [Google Scholar] [CrossRef]
- Liu, X.; Sun, D.; Qin, D.; Liu, J. Achievement of fuel savings in wheel loader by applying hydrodynamic mechanical power split transmissions. Energies 2017, 10, 1267. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Duan, C.; Bai, K.; Yao, Z. Operating Performance of Pure Electric Loaders with Different Types of Motors Based on Simulation Analysis. Energies 2021, 14, 617. [Google Scholar] [CrossRef]
- Li, L.; Liu, Q. Research on IPMSM drive system control technology for electric vehicle energy consumption. IEEE Access 2019, 7, 186201–186210. [Google Scholar] [CrossRef]
- Liu, C.; Chau, K.; Lee, C.H.; Song, Z. A critical review of advanced electric machines and control strategies for electric vehicles. Proc. IEEE 2020, 109, 1004–1028. [Google Scholar] [CrossRef]
- Pomponi, C.; Scalzi, S.; Pasquale, L.; Verrelli, C.; Marino, R. Automatic motor speed reference generators for cruise and lateral control of electric vehicles with in-wheel motors. Control Eng. Pract. 2018, 79, 126–143. [Google Scholar] [CrossRef]
- Hu, J.; Jia, M.; Xiao, F.; Fu, C.; Zheng, L. Motor vector control based on speed-torque-current map. Appl. Sci. 2019, 10, 78. [Google Scholar] [CrossRef] [Green Version]
- Guo, T.; Cai, S.-L.; Chen, Q.-H.; Lin, T.-L.; Chen, H.-B.; Fu, S.-J.; Guo, H.-B. Electro-hydraulic Shift System and Control Strategy for Pure Electric Loader Based on Pressure Feedback. Chin. Hydraul. Pneum. 2020, 0, 22–29. [Google Scholar] [CrossRef]
- Djeriou, A.; Houari, A.; Machmoum, M.; Mesbahi, T.; Ghanes, M. Cascade GW Controllers for Speed Ripple Minimization at Low Speed Operation of PMSM Drives for EV. In Proceedings of the IECON 2020 the 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 4667–4672. [Google Scholar]
- Djeriou, A.; Drihem, D. On the Continuity of Pseudo-Differential Operators on Multiplier Spaces Associated to Herz-type Triebel–Lizorkin Spaces. Mediterr. J. Math. 2019, 16, 1–25. [Google Scholar] [CrossRef]
- Elsonbaty, N.A.; Enany, M.A.; Hassanin, M.I. An Efficient Vector Control Policy for EV-Hybrid Excited Permanent-Magnet Synchronous Motor. World Electr. Veh. J. 2020, 11, 42. [Google Scholar] [CrossRef]
- Ahmed, M.M.; Hassanein, W.S.; Elsonbaty, N.A.; Enany, M.A. Proposing and evaluation of MPPT algorithms for high-performance stabilized WIND turbine driven DFIG. Alex. Eng. J. 2020, 59, 5135–5146. [Google Scholar] [CrossRef]
- Zhu, L.; Xu, B.; Zhu, H. Interior Permanent Magnet Synchronous Motor Dead-Time Compensation Combined with Extended Kalman and Neural Network Bandpass Filter. Prog. Electromagn. Res. M 2020, 98, 193–203. [Google Scholar] [CrossRef]
- Fu, S.; Ren, H.; Lin, T.; Zhou, S.; Chen, Q.; Li, Z. SM-PI control strategy of electric motor-pump for pure electric construction machinery. IEEE Access 2020, 8, 100241–100250. [Google Scholar] [CrossRef]
- Bobtsov, A.; Pyrkin, A.; Aranovskiy, S.; Nikolaev, N.; Slita, O.; Kozachek, O.; Quoc, D.V. Stator flux and load torque observers for PMSM. IFAC-Pap. 2020, 53, 5051–5056. [Google Scholar] [CrossRef]
- Pyrkin, A.; Bobtsov, A.; Ortega, R.; Vedyakov, A.; Cherginets, D.; Bazylev, D.; Igor, P. Sensorless control of permanent magnet synchronous motors based on finite-time robust flux observer. IFAC-Pap. 2020, 53, 9270–9275. [Google Scholar] [CrossRef]
- Bobtsov, A.; Nikolaev, N.; Pyrkin, A.; Slita, O.; Titova, E. Simple speed observer for PMSM. In Proceedings of the 2017 9th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Munich, Germany, 6–8 November 2017; pp. 324–328. [Google Scholar]
- Bazylev, D.; Pyrkin, A.; Bobtsov, A. Position and speed observer for PMSM with unknown stator resistance. In Proceedings of the 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 1613–1618. [Google Scholar]
- Choi, K.; Kim, Y.; Kim, K.-S.; Kim, S.-K. Using the stator current ripple model for real-time estimation of full parameters of a permanent magnet synchronous motor. IEEE Access 2019, 7, 33369–33379. [Google Scholar] [CrossRef]
- Kim, Y.; Seo, H.-T.; Kim, S.-K.; Kim, K.-S. A robust current controller for uncertain permanent magnet synchronous motors with a performance recovery property for electric power steering applications. Energies 2018, 11, 1224. [Google Scholar] [CrossRef] [Green Version]
- Choi, K.; Kim, Y.; Kim, K.-S.; Kim, S.-K. Real-time optimal torque control of interior permanent magnet synchronous motors based on a numerical optimization technique. IEEE Trans. Control Syst. Technol. 2020, 29, 1815–1822. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, S.-K.; Ahn, C.K. Variable-performance proportional-type angle-filtering system for motor drives. IEEE Trans. Circuits Syst. II Express Briefs 2020, 68, 511–515. [Google Scholar] [CrossRef]
- Gai, H.; Li, X.; Jiao, F.; Cheng, X.; Yang, X.; Zheng, G. Application of a New Model Reference Adaptive Control Based on PID Control in CNC Machine Tools. Machines 2021, 9, 274. [Google Scholar] [CrossRef]
- Zaky, M.S.; Khater, M.M.; Shokralla, S.S.; Yasin, H.A. Wide-speed-range estimation with online parameter identification schemes of sensorless induction motor drives. IEEE Trans. Ind. Electron. 2008, 56, 1699–1707. [Google Scholar] [CrossRef]
- Gatto, G.; Marongiu, I.; Serpi, A. Discrete-time parameter identification of a surface-mounted permanent magnet synchronous machine. IEEE Trans. Ind. Electron. 2012, 60, 4869–4880. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rated Torque (N·m) | Rated Speed (r/min) | Rated Power (kW) | Ld (mH) | Lq (mH) | Stator Resistance (Ω) | Moment of Inertia (kg·m2) | Pole Pair |
|---|---|---|---|---|---|---|---|
| 44 | 1800 | 9 | 2.5 | 5.5 | 0.17 | 0.0055 | 2 |
| Target Speed | Target Torque | Ld | Lq | Flux Linkage |
|---|---|---|---|---|
| 120 r/min | 14 N·m | 2.5 mH | 5.5 mH | 0.203 Wb |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, T.; Chen, Y.; Chen, Q.; Lin, T.; Ren, H. An IPMSM Control Structure Based on a Model Reference Adaptive Algorithm. Machines 2022, 10, 575. https://doi.org/10.3390/machines10070575
Guo T, Chen Y, Chen Q, Lin T, Ren H. An IPMSM Control Structure Based on a Model Reference Adaptive Algorithm. Machines. 2022; 10(7):575. https://doi.org/10.3390/machines10070575
Chicago/Turabian StyleGuo, Tong, Yongjie Chen, Qihuai Chen, Tianliang Lin, and Haoling Ren. 2022. "An IPMSM Control Structure Based on a Model Reference Adaptive Algorithm" Machines 10, no. 7: 575. https://doi.org/10.3390/machines10070575
APA StyleGuo, T., Chen, Y., Chen, Q., Lin, T., & Ren, H. (2022). An IPMSM Control Structure Based on a Model Reference Adaptive Algorithm. Machines, 10(7), 575. https://doi.org/10.3390/machines10070575