


Identification of Optimal Movement Patterns for Energy Pumping


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Inverted Pendulum Model and the Optimal Control Problem
2.1. The Inverted Pendulum Model
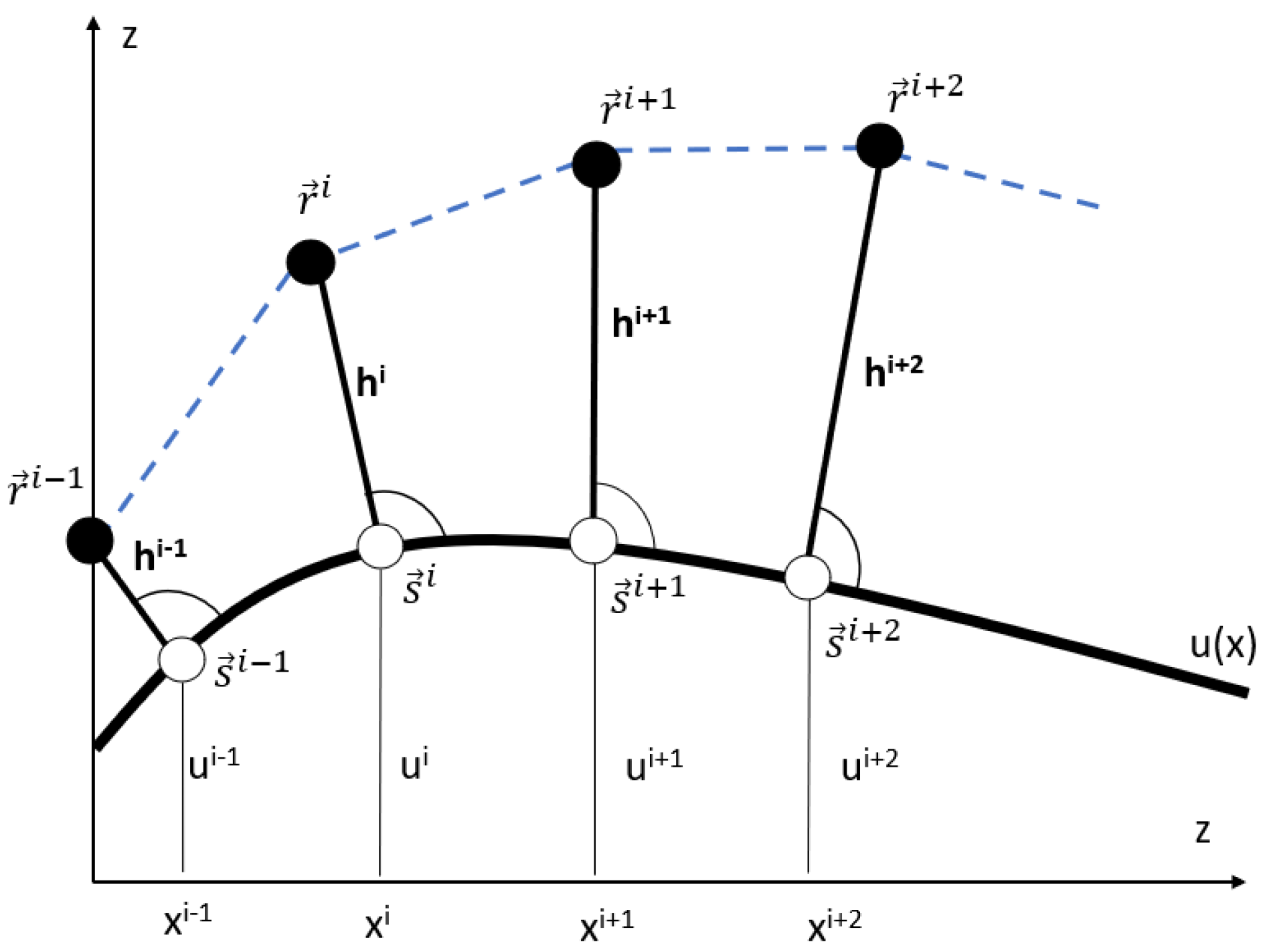
- The athlete, including his or her equipment, has a single contact pointat which he is in contact with the track for all times (see Figure 1). From now on, we will write athlete only, instead of athlete, including his or her equipment for simplicity. The athlete’s mass is concentrated in the center of mass (COM) located at
- The body axis of the athlete is modelled as a straight line between the contact point positioned at and the COM positioned at . The straight line is considered as a stiff bar in the sense that forces can be transferred to the COM from the contact point along the straight line.
- The body axis is always perpendicular to the track. Therefore, the vector is perpendicular to the track, and parallel to . The length of we call effective body height: . With this, the location of the COM can be computed from the location of the contact point and the effective body height: . As the athlete bends and stretches his body, he or she can vary his or her effective body height between the minimum effective body height (body bent maximally) to the maximal effective body height (body stretched maximally).
- As the athlete moves along the track, a normal force acts from the track to the athlete’s COM. This force acts along the body axis, from the contact point to the COM. Therefore, the athlete in our model has to make sure that his or her body axis is exactly parallel to the normal forces. This is in contrast to some sports like cycling, or skiing, there the athlete can balance forces by leaning backward or forward, since it equipment (ski, bike) provides an extended contact line, or several isolated contact points, between the athlete and the track.
- initial conditions:
- or circular conditions:
2.2. The Optimal Control Problem
3. Results
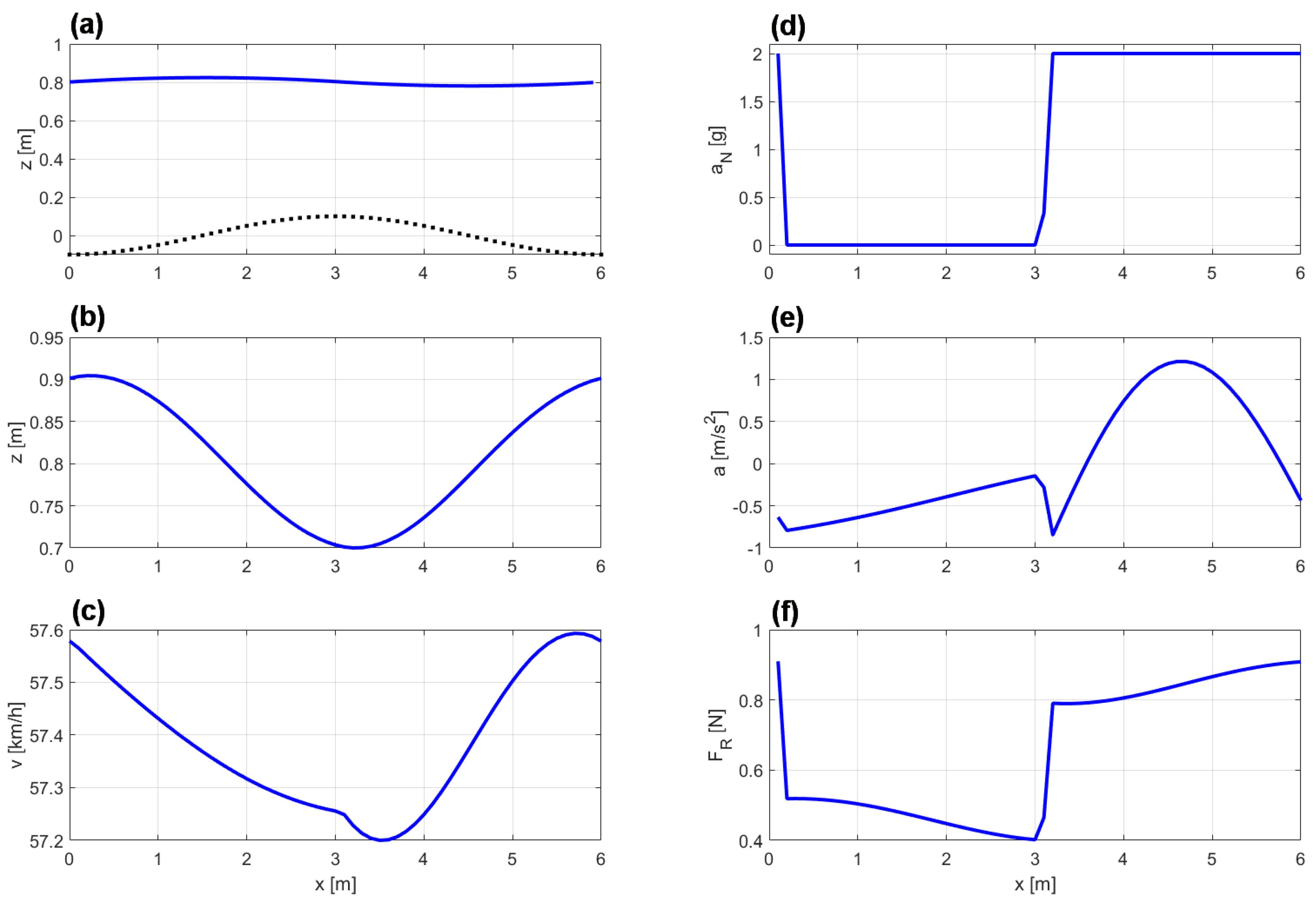
3.1. Solution of the Discrete Optimal Control Problem with a SQP-Algorithm
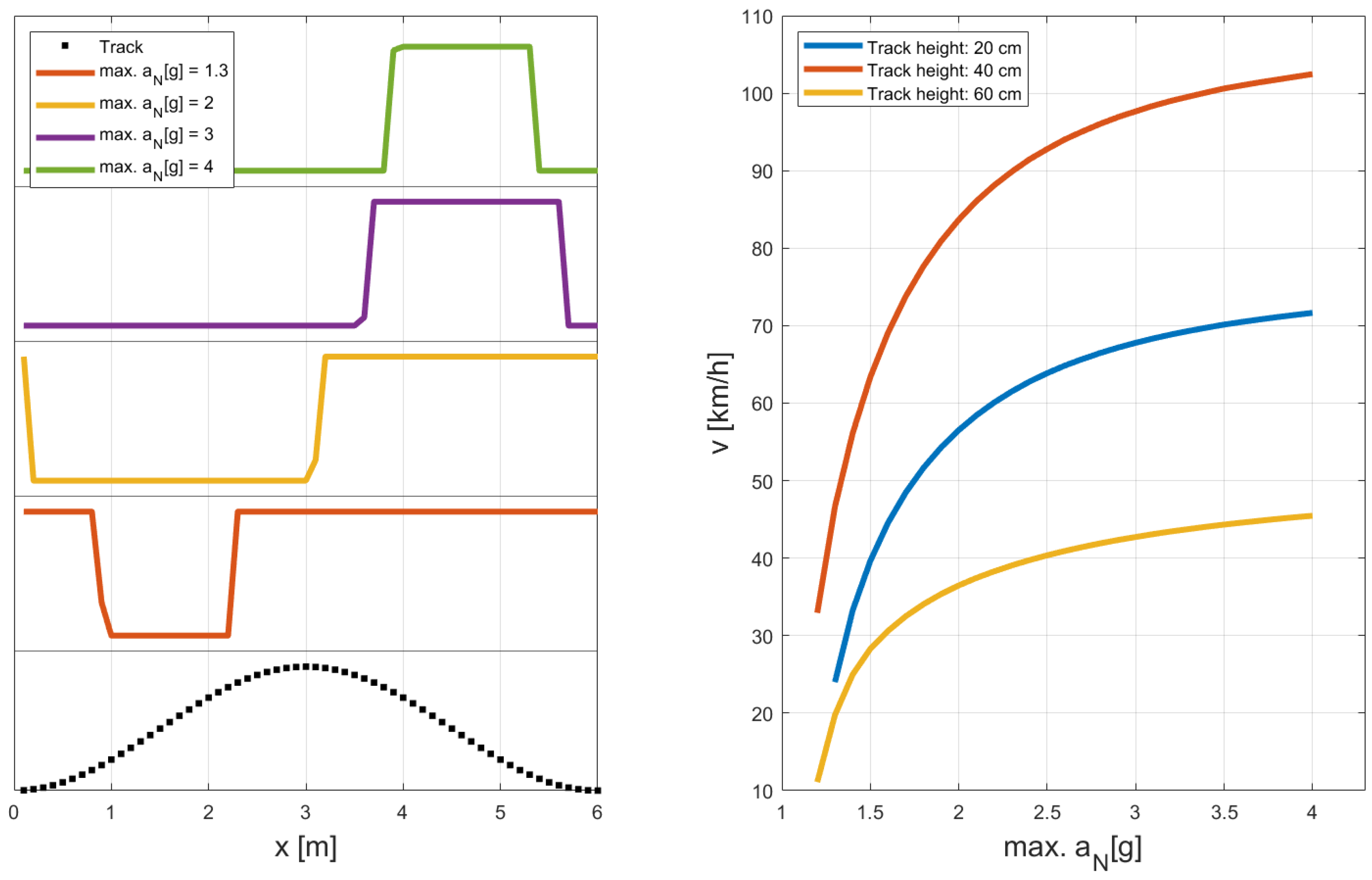
3.2. Optimal Movement Patterns under Variation of Athlete’s Maximal Body Force and Track Height
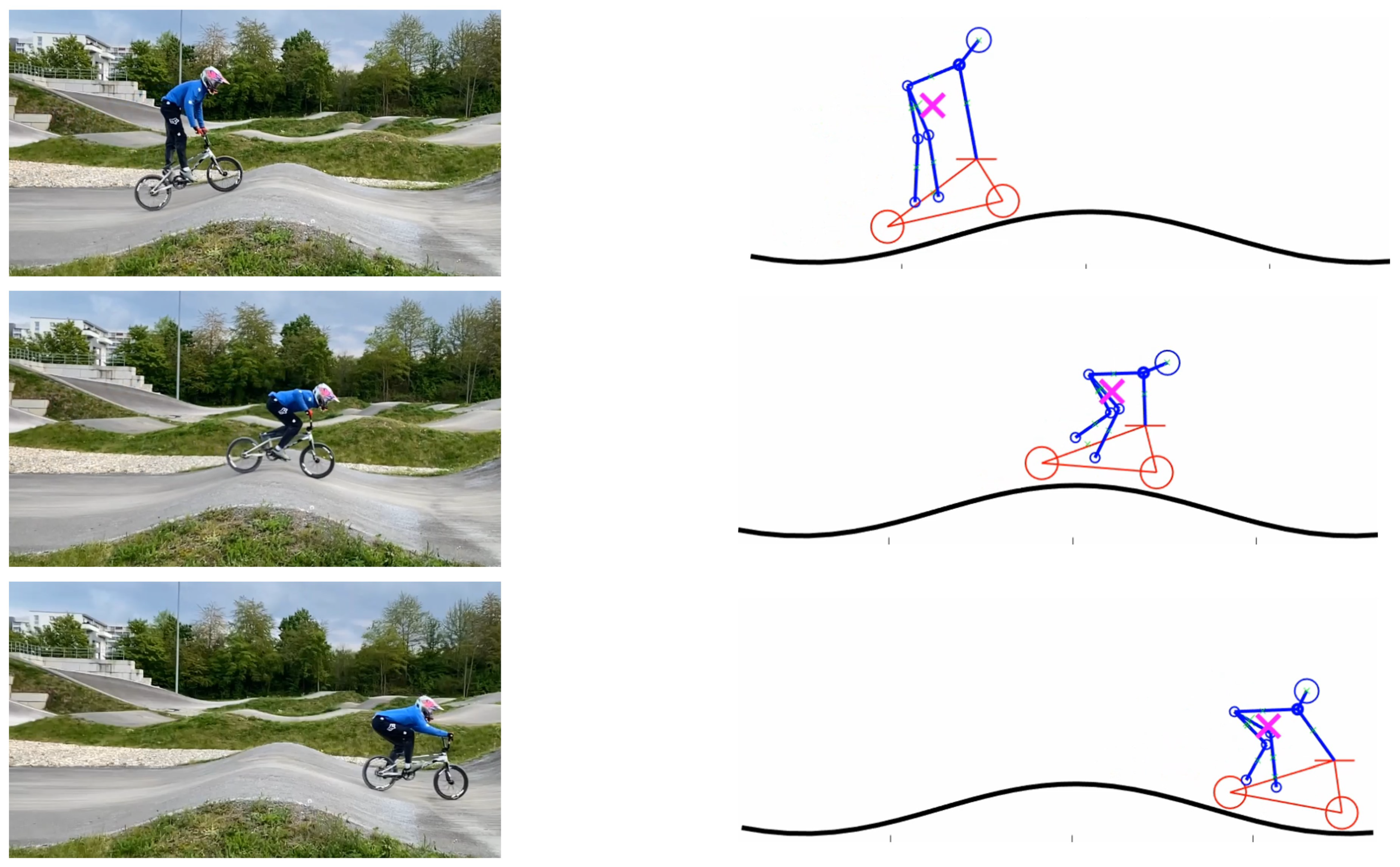
3.3. Qualitative Comparison of Optimal Movement Pattern with Data Derived from Video-Recorded BMX-Athlete
4. Discussion
4.1. General
- As the inverted pendulum model presented in this paper is highly simplified, we propose to increase the accuracy of the model by integrating more degrees of freedom into the model (modeling of athlete’s joints, modeling of athlete’s equipment). With this, the physical model of the athlete’s movement will be closer to reality, and therefore it is more likely that concise and accurate conclusions can be drawn from the computed optimal movement patterns to support athletes, and contribute to sport science. For instance, we expect results, which are closer to reality, if the athlete does not only have a single isolated contact point (such as in the inverted pendulum model), but instead has multiple contact points (as it is in biking), or a line of contact points (as it is skiing).
- Perform high-quality measurements of movement patterns of athletes performing energy pumping in such different disciplines, such as BMX-racing, or ski-cross. On this basis, it would be highly interesting to be able to compare movement patterns of athletes from different disciplines to the results of the optimal movement patterns as presented in this paper.
4.2. Learnings for Training and Competition in Sports
- The results fully agree with athlete’s experience that (a) leg force should be applied before the bump to avoid uphill movement, and (b) in the landing or compression phase, leg force is needed for landing.
- In any case, if facing high or low bumps, the athlete should use his or her maximal leg force, since the horizontal acceleration depends on the maximal leg force applied.
- The correct and exact timing of jump and landing phase is crucial for the energy pumping. Obviously, as horizontal velocities increase it is increasingly difficult for the athlete to achieve the correct timing of the jumping and landing phase.
- The optimal path can be used for evidence-based coaching.
- As a result of our study, the major advice for athletes could be phrased in simple words as: Avoid riding uphill, it’s better to jump over the hill. Generally when driving downhill try to push your center of mass upwards.
4.3. Limitations
- In this study there was no quantitative validation. In the future a proper quantitative validation is required based on subject-specific scaling of the model and motion analysis on the field.
- While the simple inverted-pendulum model turns out to be an adequate model to understand energy pumping in a generic way, it might be oversimplified to deliver a detailed description of the movement. As such, in the future, we expect more complex models will be required for a detailed description of optimal movement patterns in energy pumping.
- As the inverted-pendulum model possesses a single contact point between the athlete and the ground, it might be oversimplified for a detailed description of cycling (with 2 contact points), and skiing (with a extended line of contact). Therefore, in the future, to describe the optimal movement patterns in those sports in detail an extension of the inverted-pendulum model is required.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mateo, M.; Blasco-Lafarga, C.; Zabala, M. Pedaling power and speed production vs. technical factors and track difficulty in bicycle motocross cycling. J. Strength Cond. Res. 2011, 25, 3248–3256. [Google Scholar] [CrossRef] [PubMed]
- Schärer, C.; Gross, M.; Lorenzetti, S.; Hübner, K. Energy Transformation on Vault in Elite Artistic Gymnastics: Comparisons between Simple and Difficult Tsukahara and Yurchenko Vaults. Appl. Sci. 2021, 11, 9484. [Google Scholar] [CrossRef]
- Ouadahia, N.; Ababoua, A.; Ababoua, N.; Larbib, M.A. Windsurf Ergometer for Sail Pumping Analysis and Mechanical Power Measurement. Procedia Eng. 2014, 72, 249–254. [Google Scholar] [CrossRef] [Green Version]
- Piccoli, B.; Kulkarni, J. Pumping a swing by standing and squatting: Do children pump time optimally? IEEE Control Syst. Mag. 2005, 25, 48–56. [Google Scholar] [CrossRef]
- Curry, S.M. How children swing. Am. J. Phys. 1976, 44, 924–934. [Google Scholar] [CrossRef]
- Nitschke, M.; Dorschky1, E.; Heinrich, D.; Schlarb, H.; Eskofier1, B.M.; Koelewijn1, A.D.; van den Bogert, A.J. Efficient trajectory optimization for curved running using a 3D musculoskeletal model with implicit dynamics. Nature 2020, 10, 874–884. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, V.Q.; Johnson, R.T.; Sup, F.C.; Umberger, B.R. Bilevel Optimization for Cost Function Determination in Dynamic Simulation of Human Gait. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 1426–1435. [Google Scholar] [CrossRef] [PubMed]
- Umberger, B.R. Stance and swing phase costs in human walking. J. R. Soc. Interface 2010, 7, 1329–1340. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Umberger, B.R.; Miller, R.H. Optimal Control Modeling of Human Movement. In Handbook of Human Motion; Müller, B., Wolf, S.I., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; pp. 1–22. [Google Scholar] [CrossRef]
- Liberzon, D. Calculus of Variations and Optimal Control Theory; Princeton University Press: Princeton, NJ, USA, 2012. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer Science+Business Media: Berlin, Germany, 2006. [Google Scholar] [CrossRef] [Green Version]
- Han, S.P. A globally convergent method for nonlinear programming. J. Optim. Theory Appl. 1977, 22, 297–309. [Google Scholar] [CrossRef] [Green Version]
- Powell, M.J.D.; Watson, G.A. A fast algorithm for nonlinearly constrained optimization calculations. In Proceedings of the Biennial Conference, Dundee, UK, 28 June–1 July 1977; pp. 144–157. [Google Scholar] [CrossRef]
- Schittkowski, K. NLPQL: A Fortran subroutine for solving constrained nonlinear programming problems. Ann. Oper. Res. 1986, 5, 485–500. [Google Scholar] [CrossRef]
- van de Braak, G.; Bünner, M.J.; Schittkowski, K. Optimal Design of Electronic Components by Mixed-Integer Nonlinear Programming. Optim. Eng. 2004, 5, 271. [Google Scholar] [CrossRef]
- Gfeller, L.V.F.; Schramm, M.; Bünner, M. Optimization of the Lift Curve of Airfoils with Special Emphasis on the Improvement of the Airfoil’s Stall Behavior. In Proceedings of the 6th Symposium on OpenFOAM in Wind Energy, Gotland, Sweden, 13 June 2018. [Google Scholar]
- Nagel, M.G. Numerische Optimierung Dreidimensional Parametrisierter Turbinenschaufeln mit Umfangsunsymmetrischen Plattformen–Entwicklung, Anwendung, Validierung. Ph. D. Thesis, Universität der Bundeswehr München, Neubiberg, Germany, 2004. [Google Scholar]
- Achtziger, W. Truss topology optimization including bar properties different for tension and compression. Struct. Optim. 1996, 12, 63–74. [Google Scholar] [CrossRef]
- Bünner, M.J. The Mathematics of Optimal Products. In Proceedings of the NAFEMS Conference, Wiesbaden, Germany, 10–11 November 2014. [Google Scholar]
- Willems, P.A.; Cavagna, G.A.; Heglund, N.C. External, Internal and Total Work In Human Locomotion. J. Exp. Biol. 1995, 198, 379–393. [Google Scholar] [CrossRef] [PubMed]
- Peyré-Tartaruga, L.A.; Dewolf, A.H.; di Prampero, P.E.; Fábrica, G.; Malatesta, D.; Minetti, A.E.; Monte, A.; Pavei, G.; Silva-Pereyra, V.; Willems, P.A.; et al. Mechanical work as a (key) determinant of energy cost in human locomotion: Recent findings and future directions. Exp. Physiol. 2020, 106, 1897–1908. [Google Scholar] [CrossRef] [PubMed]
- Pushen. Available online: https://www.youtube.com/watch?v=Y2-tjzYYWHA (accessed on 1 December 2022).







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luginbühl, M.; Gross, M.; Lorenzetti, S.; Graf, D.; Bünner, M.J. Identification of Optimal Movement Patterns for Energy Pumping. Sports 2023, 11, 31. https://doi.org/10.3390/sports11020031
Luginbühl M, Gross M, Lorenzetti S, Graf D, Bünner MJ. Identification of Optimal Movement Patterns for Energy Pumping. Sports. 2023; 11(2):31. https://doi.org/10.3390/sports11020031
Chicago/Turabian StyleLuginbühl, Micha, Micah Gross, Silvio Lorenzetti, David Graf, and Martin J. Bünner. 2023. "Identification of Optimal Movement Patterns for Energy Pumping" Sports 11, no. 2: 31. https://doi.org/10.3390/sports11020031
APA StyleLuginbühl, M., Gross, M., Lorenzetti, S., Graf, D., & Bünner, M. J. (2023). Identification of Optimal Movement Patterns for Energy Pumping. Sports, 11(2), 31. https://doi.org/10.3390/sports11020031