
Design Optimization of Chute Structure Based on E-SVR Surrogate Model

 ,
, 


Abstract
:1. Introduction
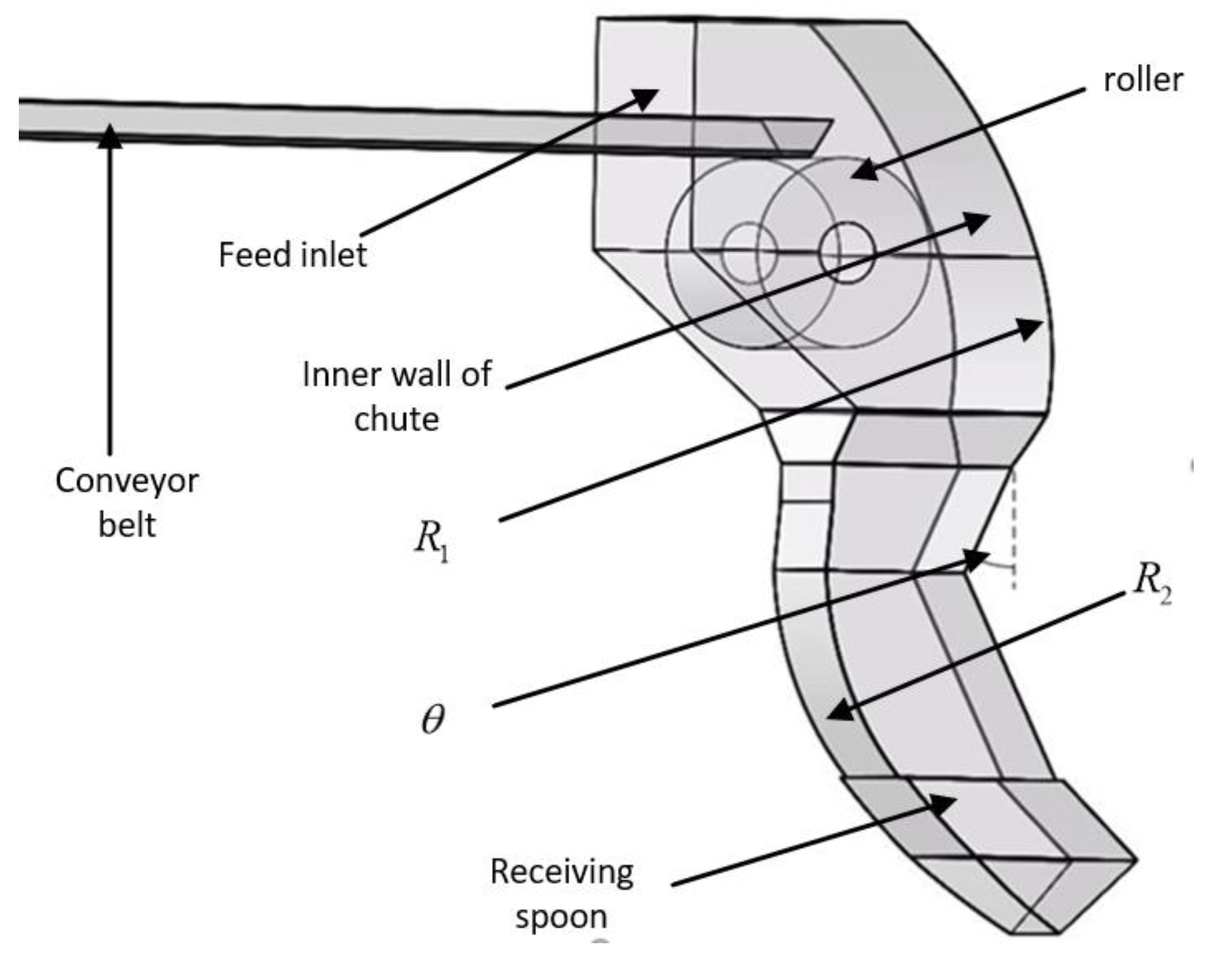
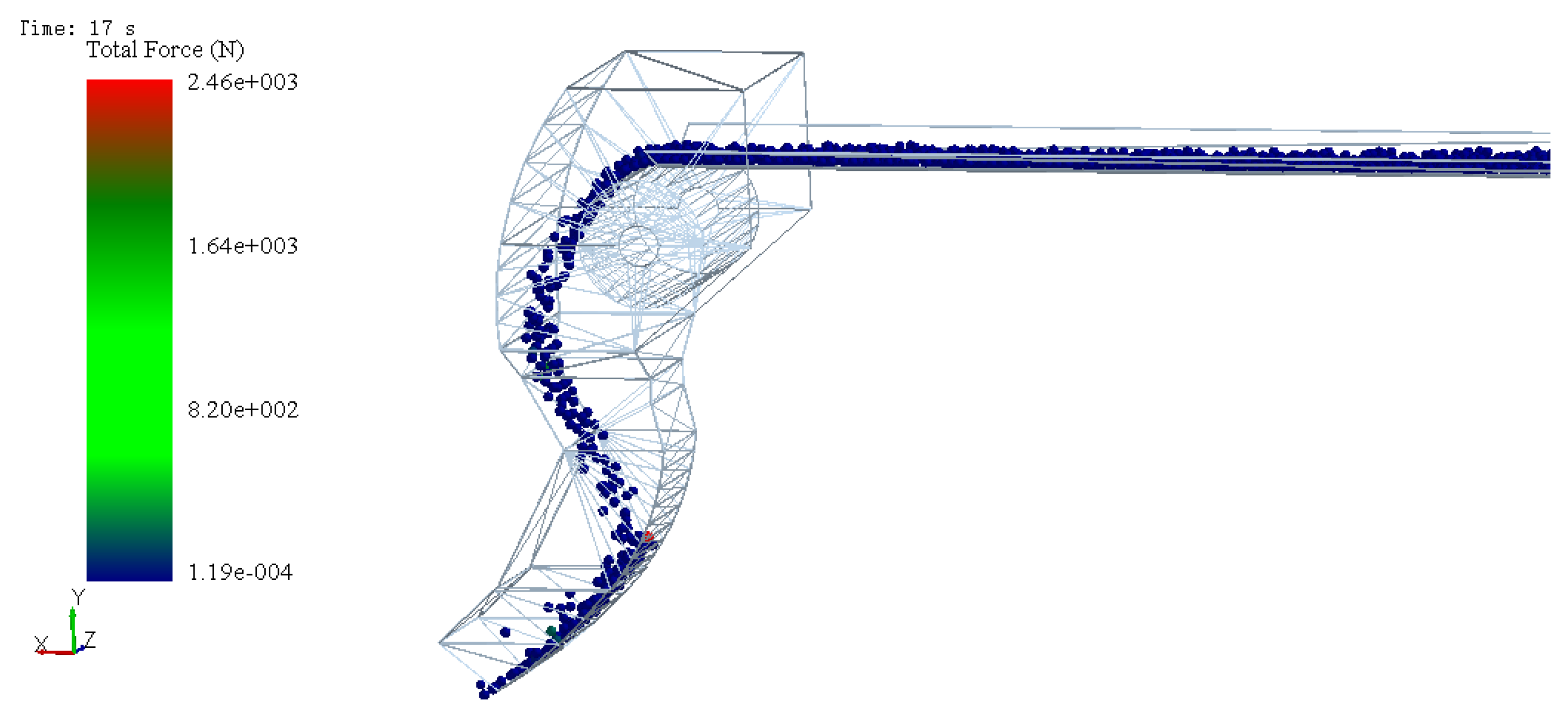
2. Simulation of the Material-Conveying Process
3. Optimization Model and Flowchart
3.1. Optimization Model
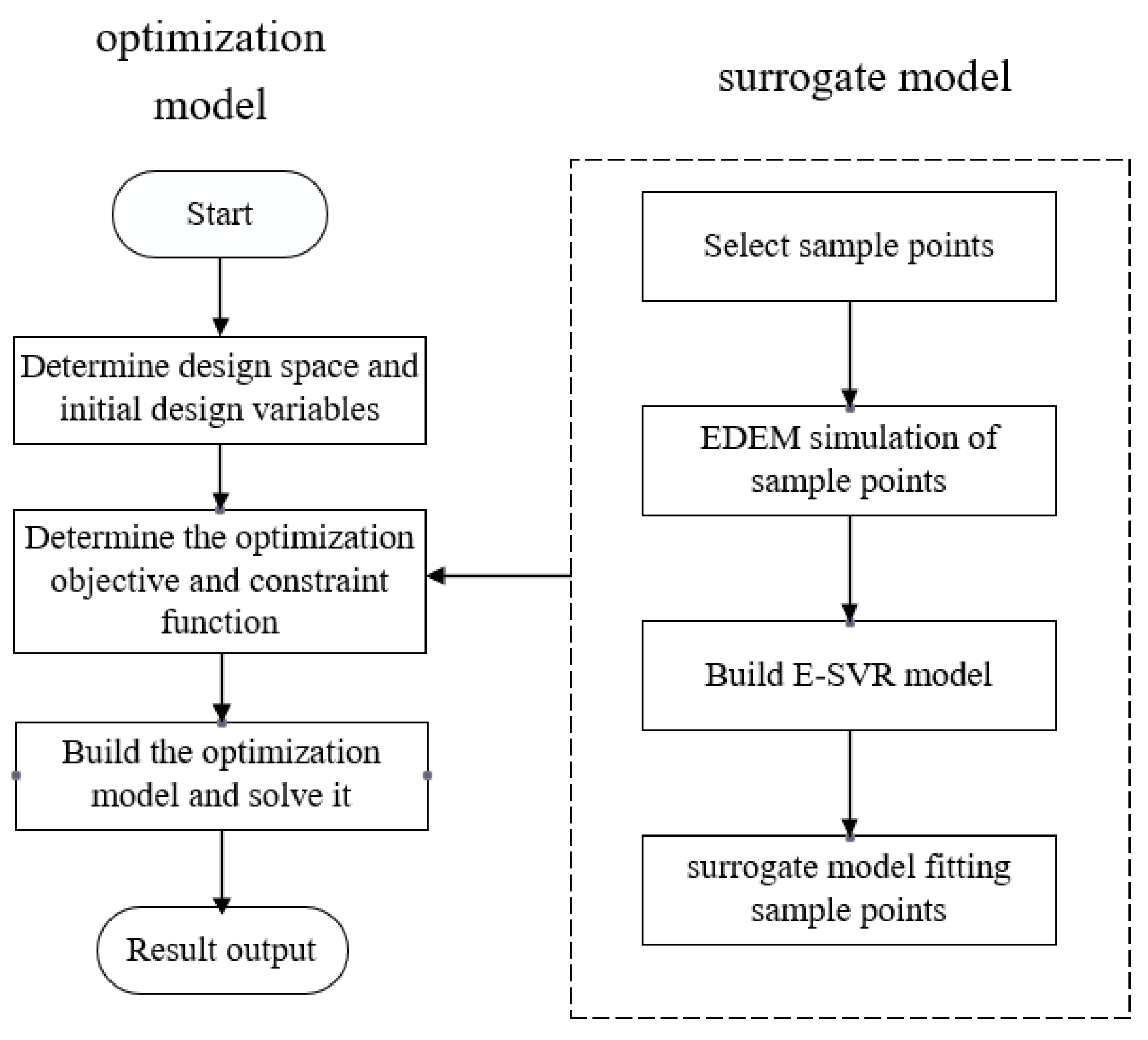
3.2. Flowchart of Chute Structure Optimization
4. E-SVR Model
4.1. SVR Model
- (1)
- Multiple correlation coefficient
- (2)
- Relative average absolute error ()
- (3)
- Relative maximum absolute error ()
4.2. E-SVR Surrogate Model
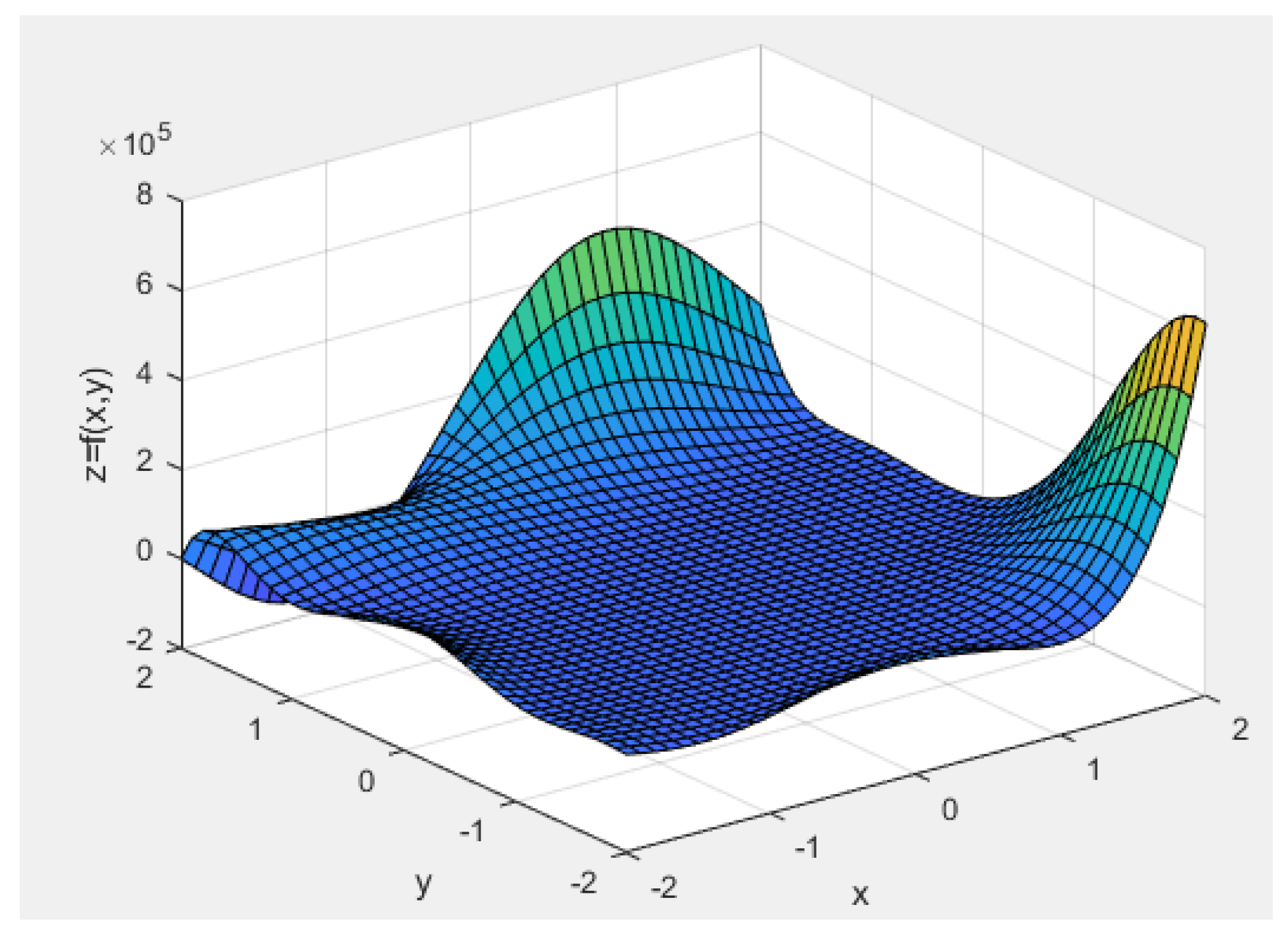
4.3. Numerical Examples
- (1)
- Brain-Hoo function [33]:
- (2)
- Hartman3 function [32]
5. Design Optimization of Chute Structure
5.1. Design of Experiment
5.2. Solution and Verification
5.3. Comparison of Single/Ensemble-Kernel-Based SVR
6. Conclusions
- (1)
- The optimization model of the chute structure parameter was established and solved in this paper. The maximum impact force of coke on the chute and the material crushing rate were effectively reduced within the allowed speed range, which improved the utilization rate of coke and prolonged the service life of the chute.
- (2)
- The E-SVR model was developed to integrate the advantages of both the Poly-SVR model and the RBF-SVR model. The effectiveness of the E-SVR model was verified through numerical examples.
- (3)
- By using the E-SVR surrogate model in the chute structural parameter optimization models to replace the implicit relationship between the maximum impact force, maximum conveying speed, and design variables, the computational cost of design optimization was reduced.
- (4)
- Through comparison with the results by using the Poly-SVR model and results by using the RBF-SVR model, the optimal results obtained by the proposed E-SVR model are accurate and effective, which is of great significance for the design of chute structure.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tamoghna, M.; Henrik, S. Simulation of Burden Distribution and Charging in an Ironmaking Blast Furnace. IFAC Pap. Online 2015, 48, 183–188. [Google Scholar] [CrossRef]
- Yu, Y.H.; Wu, R.F.; Ruan, W.S. Design and performance analysis of chute with aluminum foam laminated structure. J. Mach. Des. 2017, 34, 65–69. [Google Scholar]
- Ma, C.; Ren, T. Structure Design and Optimization of Distributing Chutes in Blast Furnace for Wear Resistance. China Mech. Eng. 2017, 28, 253–257, 266. [Google Scholar]
- O’Shaughnessy, C.; Masoero, E.; Gosling, P.D. Topology optimization using the discrete element method. Part 1: Methodology, validation, and geometric nonlinearity. Meccanica 2022, 57, 1213–1231. [Google Scholar] [CrossRef]
- Zhou, L.; Esteban, R.; Bryan, E.; Antonio, M. A smooth contact algorithm for the combined finite discrete element method. Comput. Part Mech. 2020, 7, 807–821. [Google Scholar] [CrossRef]
- Li, X.; Yuan, H.; Sun, G.S. Anti-impact Design of Discharge Chute. Coal. Mine Mach. 2020, 41, 4–5. [Google Scholar]
- Roberts, A.W. Chute Performance and design for rapid flow conditions. Chem. Eng. Technol. 2010, 26, 163–170. [Google Scholar] [CrossRef]
- Ren, X.P.; Jia, Y.W. Value analysis of influence of different factors on wear of distributing chute. China Metall. 2020, 30, 11–15, 40. [Google Scholar]
- Zhang, C.H.; Xu, Y.S.; Qin, Y.L.; Zhao, J.Y.; Li, W.L. Optimization design and application of the material-transfer device based on DEM. J. Mach. Des. 2020, 37, 112–117. [Google Scholar]
- Murao, A.; Kashihara, Y.; Oyama, N.; Sato, M.; Watakabe, S.; Yamamoto, K.; Fukumoto, Y. Development of Control Techniques for Mixing Small Coke at Bell-less Top Blast Furnace. Tetsu Hagane J. Iron Steel Inst. Jpn. 2016, 102, 614–622. [Google Scholar] [CrossRef] [Green Version]
- Xia, R.; Wang, X.W.; Li, B. Abrasion performance of the scraper conveyor chute under complex working conditions. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2021, 235, 2364–2375. [Google Scholar] [CrossRef]
- Guixin, S.; Futang, X.; Yue, H.; Xiaogang, W. BP-ANN Model to Optimize the Structural Parameter Setting of Transfer Point. In Proceedings of the 2020 4th International Workshop on Renewable Energy and Development (Iwred 2020), Sanya, China, 24–26 April 2020; Volume 510. [Google Scholar] [CrossRef]
- Li, H.F.; Luo, Z.G.; Zhang, S.C.; Zou, Z.S. Effect of Chute Angle on Process of Mixing Charging. J. Northeast. Univ. Nat. Sci. 2012, 33, 681–684. [Google Scholar]
- Chen, L.S.; Luo, Z.G.; You, Y.; Zou, Z.S. Effects of Flap Angles on the Charging Procedure of Flap Distributors. J. Northeast. Univ. Nat. Sci. 2013, 34, 971. [Google Scholar]
- Huang, W.F.; Sun, X.M. Development and application of the breakup-proof device for the telescopic chute. Goal Eng. 2004, 10, 69–70. [Google Scholar]
- Jha, R.K.; Swami, P.D. Failure prognosis of rolling bearings using maximum variance wavelet subband selection and support vector regression. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 13. [Google Scholar] [CrossRef]
- Li, Y.X.; Huang, X.Z.; Zhao, C.Y.; Ding, P.F. Stochastic fractal search-optimized multi-support vector regression for remaining useful life prediction of bearings. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 18. [Google Scholar] [CrossRef]
- Andres-Perez, E.; Gonzalez-Juarez, D.; Martin-Burgos, M.J.; Carro-Calvo, L.; Salcedo-Sanz, S. Influence of the number and location of design parameters in the aerodynamic shape optimization of a transonic aerofoil and a wing through evolutionary algorithms and support vector machines. Eng. Optimiz. 2017, 49, 181–198. [Google Scholar] [CrossRef]
- Duan, L.; Xiao, N.; Li, G.; Cheng, A.; Chen, T. Design optimization of tailor-rolled blank thin-walled structures based on -support vector regression technique and genetic algorithm. Eng. Optimiz. 2017, 49, 1148–1165. [Google Scholar] [CrossRef]
- Ye, Y.F.; Gao, J.B.; Shao, Y.H.; Li, C.N.; Jin, Y.; Hua, X.Y. Robust support vector regression with generic quadratic nonconvex epsilon-insensitive loss. Appl. Math. Model. 2020, 82, 235–251. [Google Scholar] [CrossRef]
- Zhu, P.; Pan, F.; Chen, W.; Zhang, S. Use of support vector regression in structural optimization: Application to vehicle crashworthiness design. Math. Comput. Simulat. 2012, 86, 21–31. [Google Scholar] [CrossRef]
- Gupta, D.; Acharjee, K.; Richhariya, B. Lagrangian twin parametric insensitive support vector regression (LTPISVR). Neural Comput. Appl. 2020, 32, 5989–6007. [Google Scholar] [CrossRef]
- Liu, Y.F.; Yan, C.P.; Ni, H.X. The approach to multi-objective optimization for process parameters of dry hobbing under carbon quota policy. Int. J. Adv. Manuf. Technol. 2022, 121, 6073–6094. [Google Scholar] [CrossRef]
- Xiang, H.Y.; Li, Y.L.; Liao, H.L.; Li, C.J. An adaptive surrogate model based on support vector regression and its application to the optimization of railway wind barriers. Struct. Multidiscip. Optim. 2017, 55, 701–713. [Google Scholar] [CrossRef]
- Tsirikoglou, P.; Abraham, S.; Contino, F.; Lacor, C.; Ghorbaniasl, G. A hyperparameters selection technique for support vector regression models. Appl. Soft Comput. 2017, 10, 139–148. [Google Scholar] [CrossRef]
- Kong, D.D.; Chen, Y.J.; Li, N.; Tan, S.L. Tool wear monitoring based on kernel principal component analysis and v-support vector regression. Int. J. Adv. Manuf. Tech. 2017, 89, 175–190. [Google Scholar] [CrossRef]
- Kaminski, M.; Solecka, M. Optimization of the truss-type structures using the generalized perturbation-based Stochastic Finite Element Method. Finite Elem. Anal. Des. 2013, 63, 69–79. [Google Scholar] [CrossRef]
- Azamathulla, H.M.; Ghani, A.A.; Chang, C.K.; Hasan, Z.A.; Zakaria, N.A. Machine Learning Approach to Predict Sedment Load—A Case Study. Clean Soil Air Water 2010, 38, 969–976. [Google Scholar] [CrossRef]
- Yang, C.Z.; Liu, J.Q.; Zeng, Y.Y.; Xie, G.Y. Prediction of components degradation using support vector regression with optimized parameters. Energy Procedia 2017, 127, 284–290. [Google Scholar] [CrossRef]
- Huang, H.; Ding, S.; Jin, F.; Yu, J.; Han, Y. A Novel Granular Support Vector Machine Based on Mixed Kernel Function. Int. J. Digit. Content Technol. Its Appl. 2012, 6, 484–492. [Google Scholar] [CrossRef]
- Zhu, P.; Zhang, Y.; Chen, G.L. Metamodeling development for reliability-based design optimization of automotive body structure. Comput. Ind. 2011, 62, 729–741. [Google Scholar] [CrossRef]
- Goel, T.; Haftka, R.T.; Shyy, W.; Queipo, N.V. Ensemble of surrogates. Struct. Multidiscip. Optim. 2007, 33, 199–216. [Google Scholar] [CrossRef]
- Viana, F.A.C.; Haftka, R.T.; Steffen, V. Multiple surrogates: How cross-validation errors can help us to obtain the best predictor. Struct. Multidiscip. Optim. 2009, 39, 439–457. [Google Scholar] [CrossRef]
- Shan, S.Q.; Wang, G.G. Survey of modeling and optimization strategies to solve high-dimensional design problems with computationally-expensive black-box functions. Struct. Multidiscip. Optim. 2010, 41, 219–241. [Google Scholar] [CrossRef]
- Li, X.K.; Zhu, H.; Chen, Z.Z.; Ming, W.Y.; Cao, Y.; He, W.B.; Ma, J. Limit state Kriging modeling for reliability-based design optimization through classification uncertainty quantification. Reliab. Eng. Syst. Saf. 2022, 224, 108539. [Google Scholar] [CrossRef]
- Li, X.K.; Han, X.Y.; Chen, Z.Z.; Ming, W.Y.; Cao, Y.; Ma, J. A multi-constraint failure-pursuing sampling method for reliability-based design optimization using adaptive Kriging. Eng. Comput. 2022, 38, 297–310. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | |
|---|---|---|
| Spherical material property | Diameter (mm) | 80 |
| Poisson ratio | 0.28 | |
| Shear modulus (GPa) | 1.98 | |
| Density (Kg/m3) | 500 | |
| Chute properties | Poisson ratio | 0.3 |
| Shear modulus (GPa) | 80 | |
| Density (Kg/m3) | 7850 | |
| Collision properties between materials | Coefficient of restitution | 0.40 |
| Static friction coefficient | 0.40 | |
| Coefficient of rolling friction | 0.05 | |
| Collision properties between material and chute | Coefficient of restitution | 0.50 |
| Static friction coefficient | 0.30 | |
| Coefficient of rolling friction | 0.10 | |
| Simulation parameter setting | Number of particles between materials/(s) | 5000 |
| Fixed time step(s) | 6.8 × 104 |
| Kernel Function | Formulas |
|---|---|
| Linear kernel function | |
| Sigmoid kernel function | |
| Radial basis kernel function | |
| Polynomial kernel function |
| Evaluation Index | Poly-SVR | RBF-SVR | E-SVR |
|---|---|---|---|
| R2 | 1 | 0.9575 | 1 |
| RAAE | 0.0026 | 0.1078 | 0.0038 |
| RMAE | 0.0276 | 1.3177 | 0.031 |
| i | aij | ci | pij | ||||
|---|---|---|---|---|---|---|---|
| 1 | 3.0 | 10 | 30 | 1.0 | 0.3689 | 0.1170 | 0.2673 |
| 2 | 0.1 | 10 | 35 | 1.2 | 0.4699 | 0.4387 | 0.7470 |
| 3 | 3.0 | 10 | 30 | 3.0 | 0.1091 | 0.8732 | 0.5547 |
| 4 | 0.1 | 10 | 35 | 3,2 | 0.03815 | 0.5743 | 0.8828 |
| Evaluation Index | Poly-SVR | RBF-SVR | E-SVR |
|---|---|---|---|
| R2 | 0.2628 | 0.7461 | 0.7581 |
| RAAE | 0.6744 | 0.3854 | 0.3689 |
| RMAE | 3.3907 | 1.8152 | 2.1837 |
| R1, R2, θ | R1, R2, θ | R1, R2, θ | R1, R2, θ | R1, R2, θ |
|---|---|---|---|---|
| 2168/2034/27.9 | 2350/2125/29.1 | 2406/2153/29.4 | 2042/1971/27.1 | 2296/2098/28.7 |
| 2375/2137/29.2 | 1877/1888/26.1 | 1738/1819/25.2 | 1961/1931/26.6 | 2338/2119/29.0 |
| 1907/1903/26.3 | 1934/1917/26.5 | 1979/1939/26.7 | 2144/2022/27.8 | 1830/1865/25.8 |
| 2052/1976/27.2 | 1782/1841/25.5 | 2428/2164/29.6 | 1763/1832/25.4 | 2088/1994/27.4 |
| 1852/1876/25.9 | 2205/2052/28.2 | 2220/2060/28.3 | 2495/2198/30.0 | 2010/1955/26.9 |
| 1705/1802/25.0 | 2281/2090/28.6 | 2460/2180/29.8 | 2248/2074/28.4 | 2116/2008/27.6 |
| Structure Parameter | Maximum Impact Force | Maximum Conveying Speed | |
|---|---|---|---|
| Before optimization | 2100, 2000, 27.5 | 2460 N | 7.59 m/s |
| After optimization | 2259.6, 1813.4, 29.9 | 2040 N | 7.09 m/s |
| Structure Parameter | Maximum Impact Force | Maximum Conveying Speed | |
|---|---|---|---|
| Poly-SVR | 2296.7, 1742.4, 29.3 | 2420 N | 7.14 m/s |
| RBF-SVR | 2173.5, 1909.5, 28.2 | 2370 N | 7.18 m/s |
| E-SVR | 2259.6, 1813.4, 29.9 | 2040 N | 7.09 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Jiang, Q.; Long, Y.; Chen, Z.; Zhao, W.; Ming, W.; Cao, Y.; Ma, J. Design Optimization of Chute Structure Based on E-SVR Surrogate Model. Metals 2023, 13, 635. https://doi.org/10.3390/met13030635
Li X, Jiang Q, Long Y, Chen Z, Zhao W, Ming W, Cao Y, Ma J. Design Optimization of Chute Structure Based on E-SVR Surrogate Model. Metals. 2023; 13(3):635. https://doi.org/10.3390/met13030635
Chicago/Turabian StyleLi, Xiaoke, Qianlong Jiang, Yu Long, Zhenzhong Chen, Wenbo Zhao, Wuyi Ming, Yang Cao, and Jun Ma. 2023. "Design Optimization of Chute Structure Based on E-SVR Surrogate Model" Metals 13, no. 3: 635. https://doi.org/10.3390/met13030635
APA StyleLi, X., Jiang, Q., Long, Y., Chen, Z., Zhao, W., Ming, W., Cao, Y., & Ma, J. (2023). Design Optimization of Chute Structure Based on E-SVR Surrogate Model. Metals, 13(3), 635. https://doi.org/10.3390/met13030635