1. Introduction
In most developed countries, existing roadway and railway bridges built between the 1950s and 1990s exhibit structural deficiencies that could limit the safety and serviceability of the transportation networks. Most of these structures show severe degradation conditions due to the absence of an adequate theoretical knowledge on the durability of concrete and steel, and were designed with regulatory requirements less demanding in terms of structural performance than the current ones. For instance, in the operating environment today, the past regulatory codes have proved to be highly deficient if the design traffic loads are compared to the current traffic demand, and when considering the performance design in relation to natural hazards, such as earthquakes. This highlights the vulnerability of the existing bridge portfolios, which could affect the resilience of entire areas in a post-event emergency phase. Indeed, this issue is increasingly perceived by road managers and public administrations. Currently, transport authorities express a strong need to plan extended and operative strategies to assess the condition of the existing bridges heritage, to identify the criticalities and to address retrofit interventions. A recent report by the Italian provinces states that almost 50% of bridges and galleries require targeted diagnostic surveys and structural assessment processes to define their remaining service life. In Italy, the guidelines for the inspection and assessment of bridges [
1] have been proposed after recent dramatic bridge collapses, such as the failure of the Polcevera bridge in Genova. Guidelines based on this theme are currently in force in other countries such as Germany and the USA [
2]. In this context, competent authorities are promoting tailored operating plan systems to investigate the degradation conditions and the structural assessment of existing bridges. General inspection campaigns are programed in order to include structural safety data in the bridge management systems. Given the high number of structures to be analyzed, efficient and simplified procedures to perform a quick and refined data collection and structural assessment are strongly needed.
Particularly, knowledge-data about existing structures are often poorly included (or not included) in bridge management databases. The process aimed at the collection and digitalization of design documents and blueprints has just started and often is hindered by the lack of this type of data, which are lost or stored in inaccessible archives [
3], requiring the retrieval of data from different sources and using alternative tools [
4]. As an example, in past decades a relevant reorganization in the management of road networks has been carried out in Italy. The knowledge-data of some roads, which were re-classified, were not transmitted between the different owners, leading to strongly fragmented databases. In these cases, a refined data collection with in-situ surveys and diagnostic tests (destructive and nondestructive) is necessary.
Conventional inspections are carried out by trained operators that visually assess the condition of the bridge, who manually draw up inspection documents and evaluate the condition of the bridge with a determined degree of subjectivity. These data are then allocated in bridge management databases to be a reference for future inspections. Traditional in-situ surveys generally require the employment of provisional structures that increase the inspection time and demand traffic limitations and service disruption. A revolutionary change in the conventional approach is determined by innovative methodologies that use sensors for structural health monitoring and innovative remote-sensing non-contact techniques, together with the Building Information Model (BIM) paradigm [
5,
6,
7,
8,
9,
10]. These components push toward comprehensive automatic workflows that start with data collection and processing and yield directly to quantitative structural assessment.
Remotely Piloted Aircraft Systems (RPASs), generally labelled as drones, represent an important resource in this framework. These are small autonomous flight vehicles equipped with low-cost RGB cameras or other more sophisticated sensors (e.g., multispectral and thermal cameras; LiDAR technologies). Several research works investigated robust methodologies to perform effective RPAS-based inspections on bridges or civil structures [
11,
12]. These are aimed at collecting precise and targeted details to be integrated with other information measured on site. In the U.S. context, the issue of the structural safety of existing bridges has been widely faced in the last decade and differing departments of transportation are promoting several research projects to exploit the entire potential of RPASs for inspecting civil structures [
13]. In the field of visual-based inspections, Chan at al. [
14] proposed a review on the advantages and criticalities of RPAS-based inspections on bridges, analyzing different aspects, such as the minimum technical requirements of the drones, restrictions of the regulatory codes and cost-benefits analyses. They claim that a RPAS-based inspection can significantly reduce the time and cost of the survey. Moreover, RPAS can strongly increase the safety of the operators which usually deal with problematic boundary conditions linked to the traffic or the environment of the bridge. Seo et al. [
15] evaluated the effectiveness of a drone-based inspection on a three-span timber bridge, analyzing the image quality and the potentialities in damage identification, comparing the results with a conventional visual inspection. Otero et al. [
16] discussed the influence of different RPAS features such as manoeuvrability, payload, size, adaptability, etc., that are decisive for an accurate field inspection.
Large potentials are linked to the use of drones together with Computer Vision (CV) algorithms, namely the Structure from Motion (SfM) techniques, capable of returning accurate three-dimensional models suitable for virtual ex-situ inspection. Furthermore, several studies focus on the quantitative evaluation of damage conditions through algorithms of damage detection and crack measurement based on 3D point cloud models [
17]. Various applications turn to the extraction of geometrical data and the automatic classification of bridge components. The work by Khaloo et al. [
18] was aimed at testing 3D-photogrametry techniques to build a 3D dense point cloud of a pedestrian timber truss bridge located in Alaska, starting from drone imagery. The authors stated that the obtained model outperforms (in terms of accuracy and completeness of the details) the one achieved by means of terrestrial laser scanning-inspections. Recently, Morgenthal et al. [
2] proposed a comprehensive and automated framework for the condition assessment of bridges based on high resolution 3D models built using RPAS-based imagery. Crack detections and damage recognition are performed using machine-learning techniques. The authors claimed that automatic structural assessment algorithms considering both the degradation condition and the mechanical quantification of structural deformations should follow RPAS-based inspections. They performed a calibration of a baseline Finite Element Model (FEM) based on the structural deformations measured using the 3D point cloud model. It is worth mentioning that, as claimed in [
2], the natural remainder of the data collection phase is a quantitative structural assessment. It usually requires a finite element modeling phase together with an accurate numerical analysis to evaluate the structural bearing capacity in terms of traffic loads, remaining service-life, and vulnerability to given hazard condition such as earthquakes.
The theme of the automatic definition of FEMs from the point cloud achieved with remote sensing technologies has been faced in literature [
19,
20]. This focus on algorithms is feasible to perform a simplification of the point cloud model, extracting the features useful to finite element modeling. Actually, this task may represent a hard challenge for bridge modeling, since these structures, although characterized by a simple structural scheme, are composed by members having particularly different mechanical behaviors (e.g., bearing devices, shear keys). Moreover, structural analysis based on an FEM approach requires a considerable amount of time and computational effort, particularly if non-linear analyses should be performed for seismic vulnerability evaluation purposes. Indeed, these strategies can be difficultly applied for seismic vulnerability assessment of high-populated bridge portfolios, unless resorting to robust automated workflows and soaring computational capabilities [
3]. Dealing with the seismic risk, simplified procedures to perform structural vulnerability assessment of portfolios of structures are of increasing interest in the scientific community. These are generally based on geometrical and structural data collected by completing digital data forms through an in-situ inspection. The employment of a RPAS-based data collection can particularly facilitate this process due to safer, targeted, more economical, and timely surveys.
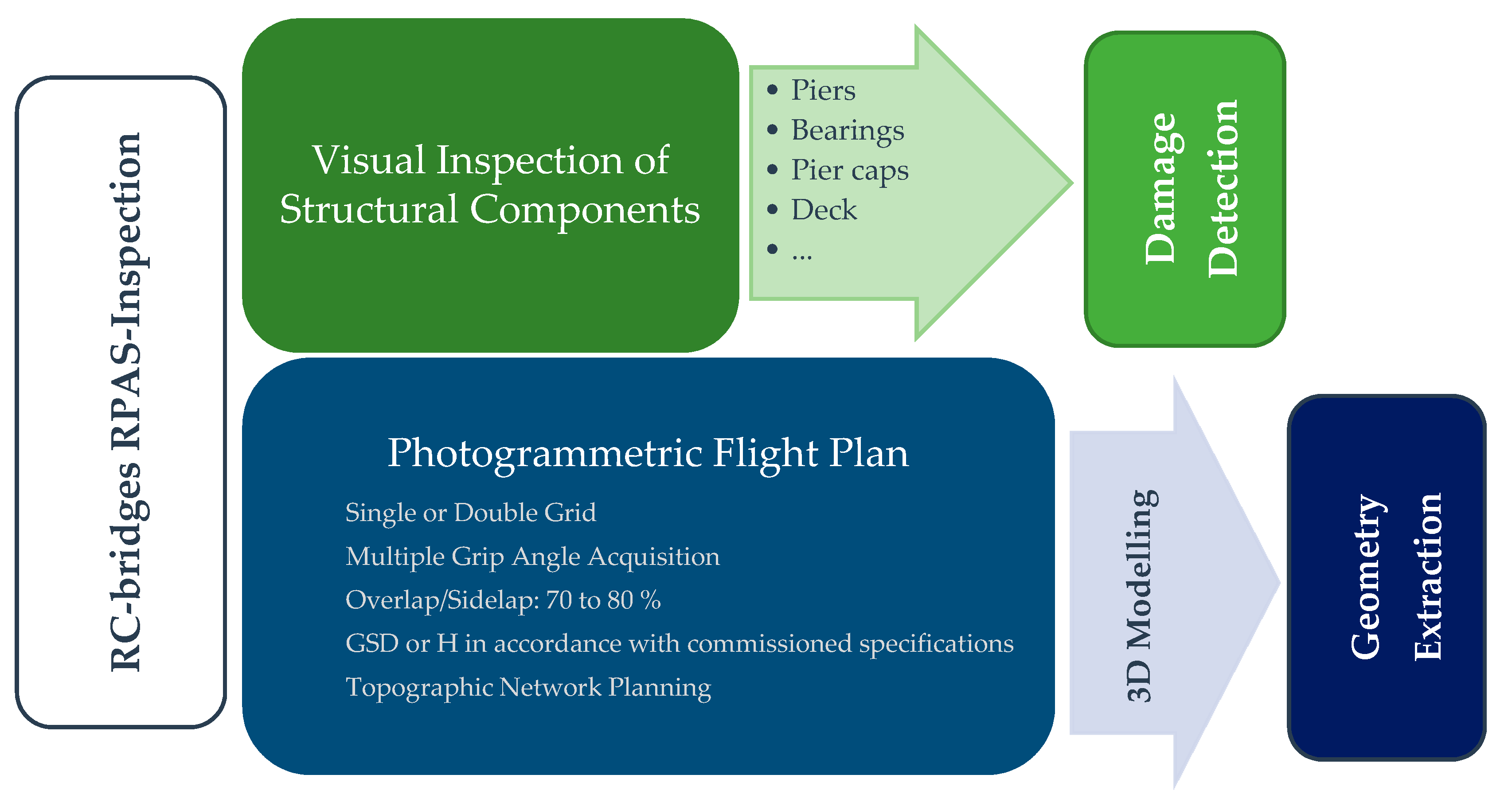
Given the remarks collected in the literature, an innovative practice-oriented methodology to perform close-range RPAS-based surveys is described in this work, adapted to the characteristics of the Italian context. The process is oriented to the development of a 3D dense point cloud model that is feasible to address further BIM modeling phase to allocate structural data for multi-temporal surveys. The surveys yield to a complete geometrical characterization of the investigated structure, which is the input for a simplified procedure for estimating the seismic risk. The latter is based on an innovative displacement-based algorithm and simplified mechanical models, that require very low computational effort with respect to FEM analysis. It is based on the geometrical input data, collected in a table spreadsheet, which can be easily obtained by means of a geometrical (automated or manual) classification of 3D point cloud model. The general workflow is outlined in
Section 2 and
Section 3 consistently with the prescriptions of the current regulatory framework.
Section 4 instead describes the application of this method to the case study. Finally, the learned observations are discussed, highlighting possible critical issues and future proposals in
Section 5, Conclusions.
The presented methodology, from the RPAS-based data collection to the seismic risk assessment, is applied on a six-span Reinforced Concrete (RC) bridge of the Basilicata road network, representing a typical Italian bridge typology. In the process automation prospectus, the proposed work highlights the advantages and limitations that have emerged from this new approach applied to bridge management and control, and the need to structure a methodical programme to test and validate several types of structures.
3. Simplified Seismic Risk Assessment
A simplified procedure for the seismic risk assessment to improve the feasibility of risk-based prioritization strategy is proposed. It is based on data easily attainable by means of a RPAS-based inspection and appropriately arranged within a BIM environment. It is evident that the 3D dense point cloud model reports only geometric and constructive information that are visible by the RGB sensors, while “hidden” constructive details, such as the amount of reinforcements in the different structural members, remain unknown. These data, together with the mechanical properties of the materials, could be retrieved by means of destructive tests on the critical structural members. However, destructive tests require an appropriate preparatory phase aimed at planning the test type and identifying the significant components to be checked. Most times, this complex process is not compatible with the concept of quick and simplified structural assessment to analyze bridge portfolios.
Since such types of data are necessary to perform a mechanic-based seismic assessment, the first step of the procedure is aimed to a data completion. This task is carried out by hypothesizing the design classes of the materials (unless it is not indicated in any available design documents) and performing a simulated design consistently with the reference (old) design code. The uncertainties on the choice of the design materials are accounted for by representing the investigated bridge by means of several index-bridges having different values of the design properties. Thus, each index-bridge is analyzed according to a simplified mechanic-based approach herein described. This methodology is adapted for simply supported girder RC bridges that is the most spread typology in the Italian context. The simplified procedure herein described to perform the seismic assessment of each index-bridge is based on the assumptions of the Individual Pier Model (IPM) described in [
50,
51]. This approach can be used for the seismic performance analysis of simply supported deck bridges with independent adjacent decks which represent the most spread typology of Italian existing bridges built during the 1960s–1990s. For the analysis of other bridge typologies such as continuous deck bridges, the simplified procedure reported in [
52] can be easily integrated in this workflow. The main steps of the procedure are described below and in
Figure 4.
3.1. Generation of Index Bridges
Conventionally, seismic assessment approaches which must deal with the modeling of the epistemic (knowledge-based) uncertainties begin with the generation of index-models [
53,
54]. The main structure is represented by more than one models which exhibit the same “deterministic” features, varying the uncertain parameters. Statistical distributions, if available, are usually used to model uncertain parameters. At the state of the art and to the author’s best knowledge, statistical distributions on design materials for existing bridges are not available, thus uniform (discrete) distributions are chosen in this case (expressing the maximum uncertainty). The same process can be carried out to model other uncertainties linked to unknown mechanical or constructive properties that cannot be detected in the inspection phase. If only discrete uniform distributions are selected, the total amount of index-bridges (
) can be calculated with Equation (1) where
is the number of uncertain variables and
is the number of discrete values of the
i-th variable. If different statistical distributions are used, Monte Carlo simulations or other statistical sampling techniques should be used. Further recommendations to perform this task are proposed in the case study section.
3.2. Simulated Design
Generally, only the substructure members are considered in the simplified seismic analysis of isostatic simply-supported girder bridges, assuming a rigid behavior of the independent adjacent decks. A rigid behavior is also associated to the foundations. For this reason, in the proposed procedure the simulated design is aimed to characterize a likely amount of reinforcements in the piers. The design traffic and seismic loads should be identified according to reference old codes. According to the prescriptions of the reference code, these loads should be appropriately combined to determine the design stresses (pairs of axial stress and flexural moment calculated in both transverse and longitudinal direction) at the base of the piers. These data can be used to estimate the minimum amount of longitudinal reinforcements to ensure that the design stresses are inferior than the axial load and moment capacity. The same process is performed, using the design shear stress in the considered pier, to calculate the transverse reinforcements. It is worth mentioning that the amount of longitudinal and transverse reinforcements should respect the minimum limits that were usually proposed in the codes.
3.3. Simplified Seismic Analysis
The seismic behavior of the piers or of the components of the deck-substructure connections are expressed by force-displacement (F-D) laws. For the piers, these are usually calculated by means of simplified formulations applied on the bilinear moment curvature relationship of the base section [
55,
56]. It is worth highlighting that an appropriate geometric characterization of the pier cross section, of the pier cap and of the deck cross section is required to complete this task. These can be easily and accurately measured based on the BIM objects with the methodology proposed in
Section 2.3. The exported measurements inherit the accuracy limits from the photogrammetric methodology (
Section 2.2). The F-D relations of the piers are calculated with the formulations proposed in [
57]. With reference to the bearing typology, the mechanical behavior of the bearing devices, which compose the deck-pier (-abutment) connections should be also retrieved. Appropriate indications to model the response of different types of bearing devices, together with shear keys and abutment-backfill systems are reported in [
58].
Once the F-D relations are calculated for all the components, these should be aggregated to characterize the mechanic response of each deck-pier (-abutment) subassembly. This process is graphically shown in
Figure 4 (step 4). Each subassembly is, thus, represented by an equivalent SDoF system in which the piers (or abutments) and the corresponding deck-connection system work as a series system. An effective mass of the equivalent subassembly is calculated summing up the mass contribution of the tributary seismic deck mass, the mass of the pier cap and a third of the mass of the pier [
59].
The performance of each subassembly under a given seismic demand can be categorized with reference to appropriate displacement-based damage state (DS) thresholds which determine the reaching of a given limit state of the subassembly. To this aim, appropriate DS thresholds should be identified for the different components and converted in terms of displacement of the corresponding subassembly.
3.4. Seismic Assessment and Fragility Curves
Once all the subassemblies of the bridge are analyzed, the performance of the bridge under a given seismic action can be calculated. To this aim, the seismic demand with reference to the location of the bridge, expressed by elastic response spectra, should be retrieved. The spectral demand should be calculated according to the investigated limit states and the corresponding exceedance return periods retrieved by the reference code.
If the response of the bridge in transverse direction is investigated, the performance of each subassembly should be computed separately, according to the IPM approach. This latter can be applied in most of the existing bridges where fixed or rubber bearings ensure the transmission of shear forces between the deck and the substructure members in transverse directions, while allowing relative rotations between the adjacent decks. On the other hand, in the longitudinal direction, the structural scheme composed by the different subassemblies should be appropriately defined. If the gap size between adjacent decks is seismically designed and allow the relative displacement between the subassemblies, the IPM approach can be applied also in this case. On the contrary, if the gap size is limited (designed considering thermal deformations only) or if shock-transmitters are present, the capacity curves of the subassemblies should be appropriately aggregated, working as a parallel system [
50,
60]. In this case, a rigid axial behavior of the deck is assumed. In this case, the response of the bridge is defined with a single force-displacement law. Global displacement-based DS thresholds should be allocated on the global capacity curve with reference to the DS thresholds of the weakest component (the first that reaches the damage state).
In the proposed procedure, the displacement-based assessment algorithm described in [
57] for SDoF systems is applied to calculate the seismic performance of the bridge. If the IPM approach is applied, a spectral reduction factor
is associated to each displacement-based DS threshold. It is used to convert the inelastic displacement capacity of the subassembly in an equivalent elastic one and is calculated with Equation (2).
is the equivalent viscous damping parameter of the subassembly and is computed aggregating the effective damping (
) of the different components (e.g., pier, bearing devices) and the corresponding displacements by means of Equation (3).
is the damage state displacement of the
i-th component and and
is the damage state threshold (top displacement) of the subassembly.
depends on the cyclic response of the specific component and is equal to 0.444 for piers and 0.565 for rubber bearings;
is the component ductility capacity at the considered damage state.
The equivalent elastic displacement capacity
is computed by dividing the displacement capacity at a given DS (
) for the corresponding
and is compared to the spectral displacement demands
where
is the effective period of the subassembly at a given DS. The capacity of each subassembly is expressed by a capacity peak ground acceleration (
) calculated with Equation (4), where
is the PGA of the code elastic demand at the investigated damage state. This procedure is graphically represented in
Figure 4 (step 5) where the capacity curve and the spectral demand are reported in an acceleration-displacement plane. This process is repeated for all the subassembly.
According to the IPM fundamentals, the minimum value of the PGA-based capacity of the different subassemblies at a given DS represents the capacity of the bridge
. If a single capacity curve is associated to the response of the bridge (in longitudinal direction), the
can be directly determined, since, for each damage state, the critical member is known. The
and
are calculated for the bridge aggregating the masses and the equivalent viscous damping factors of the different subassemblies. The value of
is used to represent the median value of the fragility curve expressed by a lognormal cumulative probability density function. It expresses the probability to reach or exceed a given damage state conditioned to a given value of intensity measure indicated as
in
Figure 4 (step 6). The logarithmic standard deviation (or simply dispersion) can be calculated analytically. However, consistently with the simplicity of the proposed algorithm, literature values can be used as proposed in [
61].
At this point, the fragility curves for all the damage states are associated to the index bridges. The probability of reaching or exceeding a damage state of the main bridge can expressed by the range of the maximum and minimum ordinates of the fragility curve populations of the index bridges at a given seismic intensity.
3.5. Simplified Risk Assessment
The output of the procedure is a quantification of the risk expressed by the mean annual frequency of exceeding a given limit state
. Generally, to perform the risk assessment, the first part of Equation (5) should be solved. To this aim, hazard curves (
) related to the location of the investigated bridge are needed, representing the annual rate of exceedance of a given seismic intensity (which in this work is the PGA). An example of hazard curve is shown in
Figure 4 (step 6) where
and
are represented in a log-log plane. The hazard curves can be obtained by appropriate probabilistic seismic hazard analysis or retrieved from the seismic demand parameters provided by the regulatory codes. The proposed procedure resorts to the simplified closed-form solutions proposed by Cornell [
62] expressed in the second part of Equation (5) in which
is the logarithmic standard deviation of the fragility and
is the hazard curve slope calculated at
in logarithmic scale.
In the proposed procedure, the is calculated for each index bridges. In this way, the risk of the main bridge can be expressed as the average of the risk calculated for each index bridges at a given DS. The range of [min), max] shows the variability in risk linked to the lack of knowledge (i.e., epistemic uncertainty) of the system.
4. Case Study
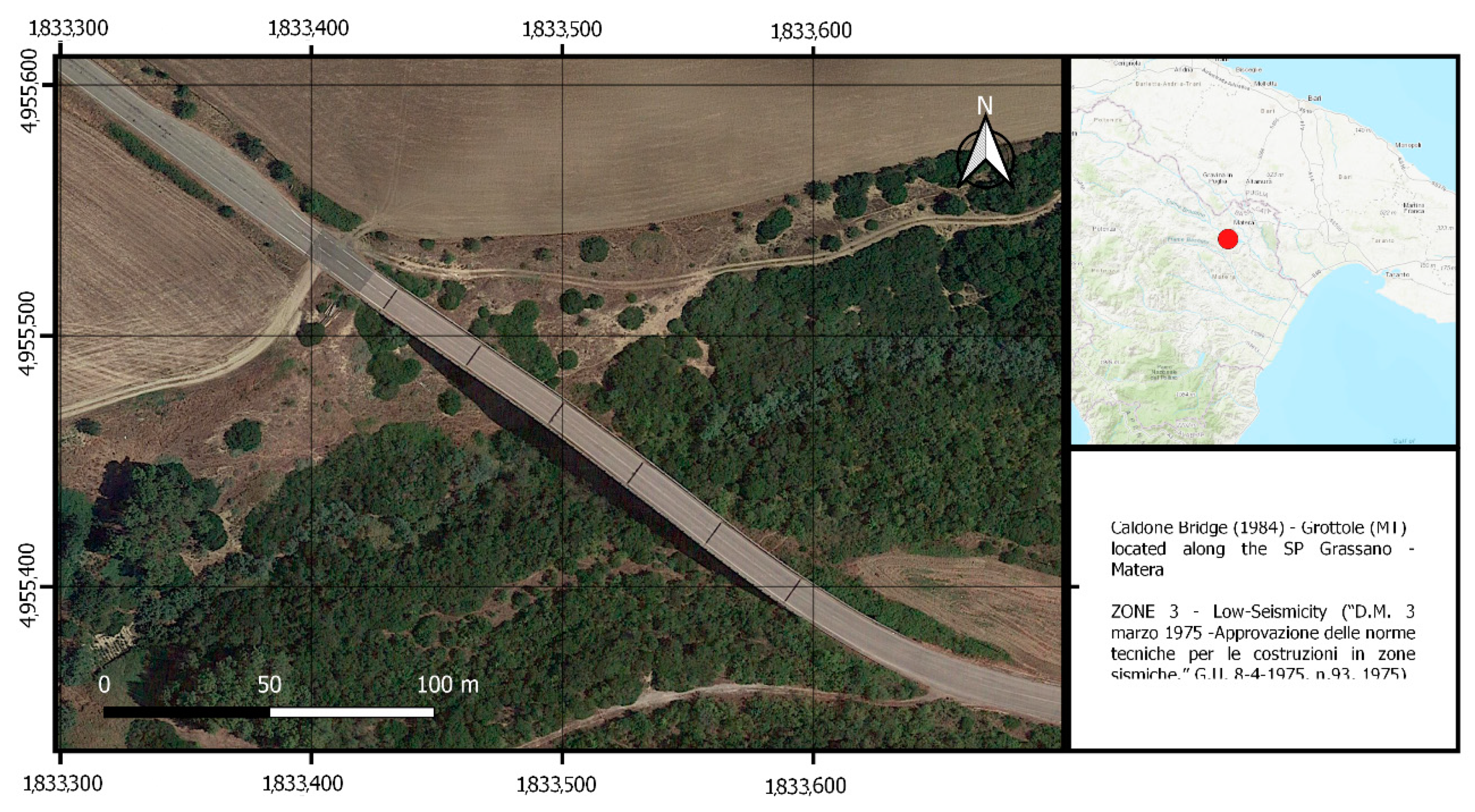
The considered case study is a RC-bridge part of the provincial road network of the Basilicata geographical region (Southern Italy). It is located in Grottole, a town 25 km from Matera. The bridge overpasses a natural erosive furrow adjacent to the lake of San Giuliano (
Figure 5). The bridge was designed in the period between 1980–1984, when the area was classified with low-seismicity (Zone 3) according to the seismic design regulatory code of the period [
63]. With the development of the Italian seismic regulatory framework, the location of the bridge is currently classified as a medium level seismic hazard zone, with an expected Peak Ground Acceleration (10% exceedance probability in 50 years) of 0.15 g.
The bridge exhibits five 30 m-long spans. The longitudinal structural scheme is composed by simply-supported independent adjacent decks consisting of four precast RC girders having a I-shaped cross section and height equal to of 1.7 m. The deck-substructure connection system is composed by two lines of four neoprene pads which are typical of the Italian bridges designed in the 1950s–1990s. Seat-type abutments are present as many of the bridges of the context. The piers exhibit a circular cross-section single-column whose heights range between 6.6 and 13.6 m. Two-meter high RC pier caps that distribute the permanent and traffic loads deriving from the deck to the piers are placed at the top of the piers. Four transverse beams per span are distributed along the span length to transfer the traffic loads between the different girders.
4.1. Data Acquisition
Using a lightweight RPAS quadcopter, namely a DJI (Dà-Jiāng Innovations, Shenzhen, China) Mavic 2 Zoom of about 905 g, equipped with a 20 MP camera (1-inch CMOS sensor, IFOV equal to 77°) with a focal length varying from 24–48 mm but set at 24 mm, two flights at 30 m Above Ground Level (AGL) were planned on 26 September 2019. The first flight (FL-1) was planned setting a nadiral view of the camera, the second one (FL-2), instead, with 45° oblique-camera in front of each side of the deck. A longitudinal overlap and sidelap rate of 80% were set for the first mission, while 75% for the second. A dataset of 97 images along the main axis of the bridge were collected for the acquisition FL-1 in 5 min and 49 s, 190 symmetrical images in FL-2 in 13 min and 48 s, both with an average Ground Sampling Distance (GSD) of 1.68 cm/pixel.
Table 1 summarizes the characteristics of the two planned acquisitions.
Eleven targets were materialized with a homogeneous distribution in the study area, paying attention to the large differences in height between the targets on pier bases and on the road surface. Nine of these latter were considered as GCPs for the georeferencing phase, while the remaining points were fixed as ICPs for the accuracy validation. They were placed at the joints between the independent adjacent decks of the viaduct, varying the side for each span. A target was placed at the base of the central pier, while the two ICPs were measured in the middle of the roadway. Afterwards, the targets were measured in network nRTK mode with a Leica Geosystem (Leica Geosystem AG part of Hexagon AB group, Canton St. Gallen, Switzerland) GS08 Plus receiver in a WGS84/UTM zone 33N (EPSG:32633) Reference System, connected to the local permanent station of the National Dynamic Network (RDN2008) of the Continuously Operating Reference Stations (CORS). The achieved measurements reached an acceptable regular accuracy along the three axes X, Y and Z of about 2 cm, an intrinsic value derived from the limits of this measurement technique. Subsequently, it was necessary to act on the altimetric component, converting them from ellipsoidal to orthometric altitude using the open source Italian software ConveRgo (Conversioni di coordinate per le Regioni). Once the photogrammetric acquisitions were completed, a close visual inspection was carried out using a DJI (Dà-Jiāng Innovations, Shenzhen, China) Phantom 4 Pro quadcopter (20 MP RGB-sensor, 1-inch CMOS sensor, IFOV equal to 84°, focal length equal to 24 mm) for manual acquisition of the state of degradation of the infrastructure (
Figure 6). The acquired images represent additional information for structural risk and deterioration assessment.
4.2. RPAS Data Processing
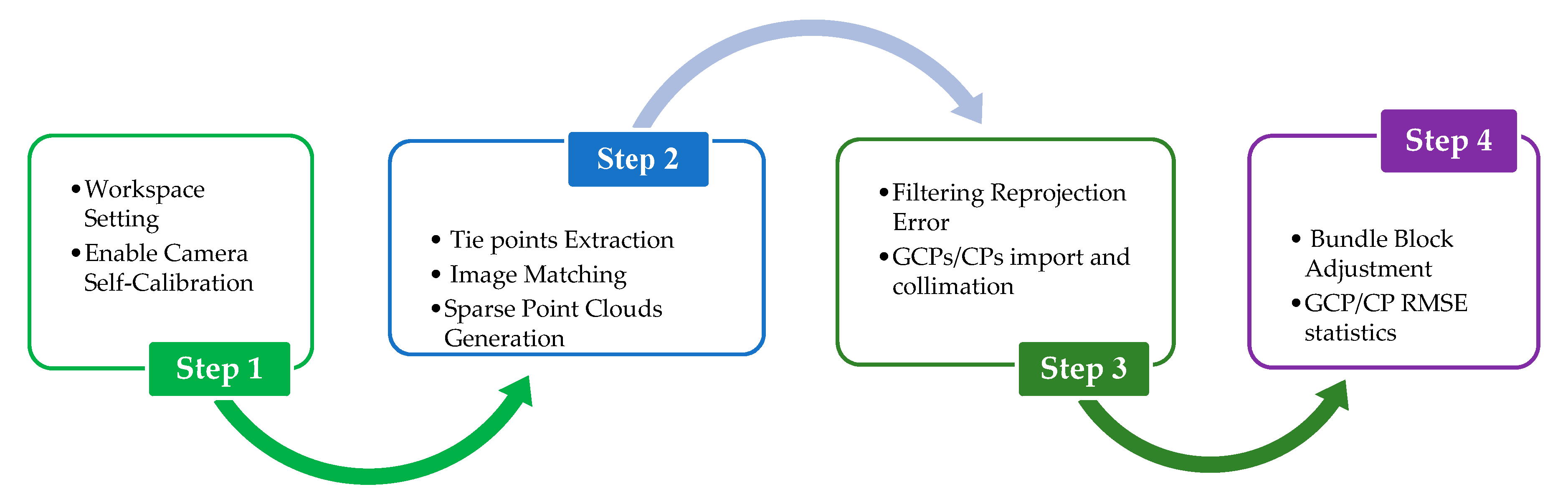
Taking note of the prerogatives described in paragraph 2.2, Agisoft Metashape (v.1.5.4.8885) was preferred as a software platform for carrying out photogrammetric operations on the acquired datasets. The latter represents a software application widely used in the academic and professional field for the robustness of the obtained results.
The software working environment has been governed by an adequate parameterization as described below. The Settings panel shows three areas of configuration, in particular: the Reference Settings act on the general coordinate system, being able to indicate the WGS84/UTM zone 33N (EPSG::32633) system, chosen as reference; the other two configuration areas parameterize on one hand the accuracy of the measurements in the field, on the other they allow assigning a weight to the measurements in the software workspace. First, the accuracy of the on-board RPAS receiver, the Inertial Measurement Unit (IMU), and the accuracy of the GCP coordinates in meters when acquired are defined. A value of 3 m was set in the Camera Accuracy (m) option, kept at 10 degrees in the Camera Accuracy (deg) option (because the RPAS does not have factory specifications for IMU sensitivity), and 0.02 m in the Marker Accuracy (m) parameter. In the Image Coordinates Accuracy option, the Marker Accuracy (pix) of 0.5 was assigned, i.e., the accuracy of the user in collimating the markers in the software workspace. The Tie Point Accuracy option of 3 pixels, on the other hand, identifies the weight given to the tying points when adjusting the blocks. In Camera Calibration, camera parameter self-corrections, initially extracted from the metadata of each image, were enabled in each bundle adjustment. The last obtained parameters were thus validated verifying the standard deviation error for each one in the Correlation tab in the Distortion Plot panel [
64].
In the next step, the alignment process of the cameras was started with Align Cameras, in High quality and enabling the automatic pre-filter with the values 40,000 and 4000 in the Key Point and Tie Point Limits options, respectively.
The process required 3 min and 15 s of processing time in the matching phase and 2 min and 8 s in the image alignment. At the end of the processing, a sparse cloud of 275,687 points was returned, with an average Reprojection Error (RE) of 0.744 pixels and an average point spacing of approximately 23 points/m2.
The obtained point cloud underwent a finishing manipulation as described in
Section 2.2. Gradual Selection option contains different filtering tools for sparse point clouds. Following the proposals discussed in Saponaro et al. [
40], three filtering operations were carried out: first of all the Uncertainty Reconstruction was evaluated with a value equal to 10; then the option Projection Accuracy was selected with a value equal to 3; finally with Reprojection Error all those points above the threshold equal to 0.40 were selected. In each step, the points selected by the filter were removed and the entire block adapted to an update of the estimated orientations. At the end of the filtering process, the BBA was started using the Optimize Cameras command.
The filtered cloud of 59,086 points then had a RE of 0.373 pixels so that it could be considered consistent and robust for further processing.
Later the coordinates of the 11 GCPs and ICPs were imported into the working environment (
Figure 7). Once the markers were filled, image by image, trying to keep low their reprojection value in the model, the BBA procedures were started again by deselecting from the Reference panel the input of the camera positional information. At the end of the process, the average error and RMSE values of the selected GCPs and ICPs were recorded in the same panel, as reported in the
Table 2.
At the end of the processing chain, the Dense Matching algorithms were started in order to obtain, in High quality and filtered in Mild mode, a dense cloud of 61,933,130 points (
Figure 7). The process took 3 h and 21 min for a point density of 884 pts/m
2. The cloud thus obtained was exported for further processing.
4.3. Geometry Extraction and Storage
Once the dense point cloud was obtained, following the workflow described in
Section 2, the process of extracting the geometries of the structural components in the BIM environment was started. The entire flow of operations was conducted in the Autodesk Revit 2020 work environment, a commercially licensed software platform widely used in the building industry.
The geometric modeling of the viaduct was carried out resorting to a manual approach, to capture adequately the characteristics of minor size structural components (e.g., neoprene bearings) that are deemed to be essential for the further simplified structural analyses.
Using the Families libraries defined as Industry Foundation Classes (IFC) classes [
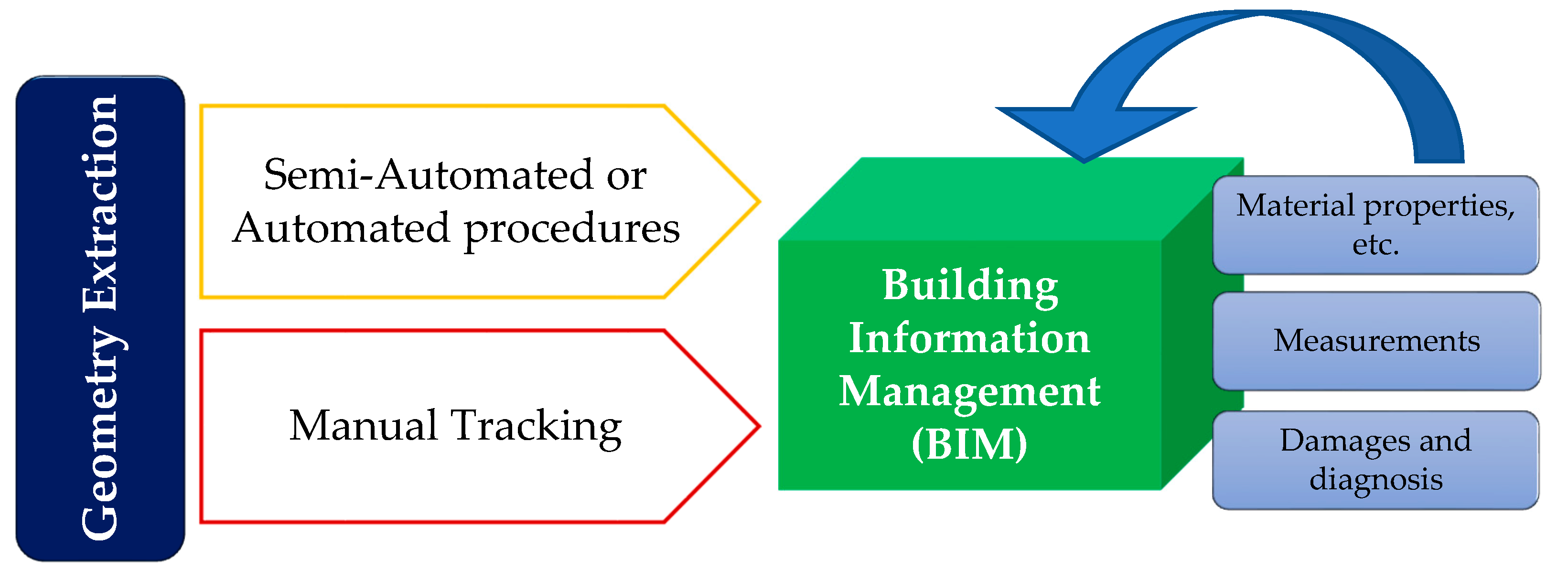
65], each structural component has been converted from a portion of point cloud into a solid block. Briefly, for the modeling of each block, the main dimensions were measured and fixed from the dense point clouds and then the most suitable family was selected in the library or created by extrusion using the appropriate editor. An object was thus generated tracing the observable shapes and assigning all the properties connected to it (e.g., materials, mechanical properties). Finally, the positioning of the generated object was performed by anchoring it to an appropriate spatial reference system. Each extracted geometric block became a container for a variety of information. In particular, in addition to the inherit data about the physical properties of the constituent materials of the specific element, different levels of information have been added about visual inspection and damage analysis. Each component was surveyed and structured in the composition of the structure, attaching to it the diagnostic reports drawn up by the operator in the field.
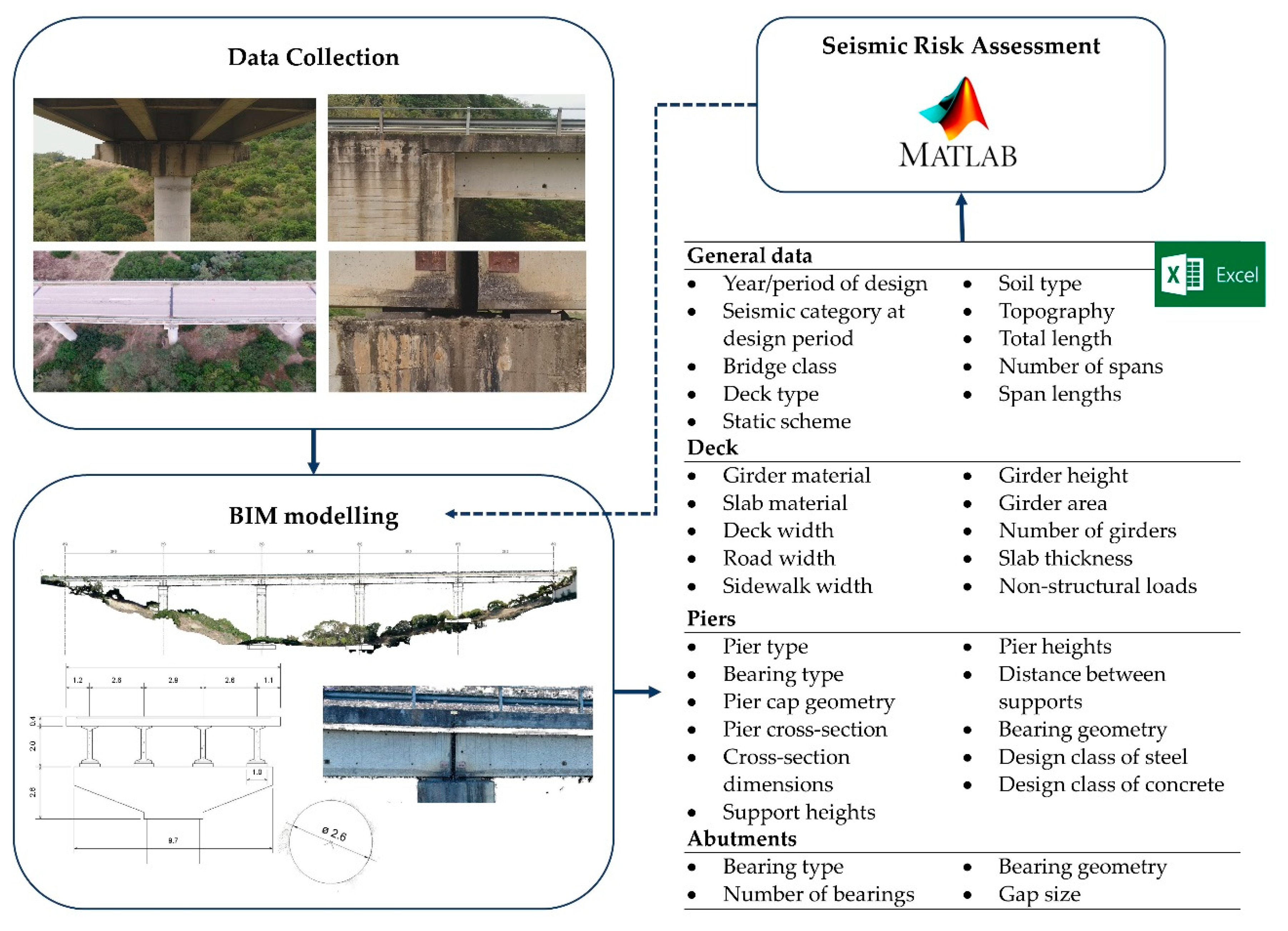
The data retrieved by the BIM objects were organized in an Excel spreadsheet including geometric and constructive details which are necessary to calculate the seismic risk by means of the simplified procedure described in
Section 3. The spreadsheet was designed based on previously developed research works aimed at collecting data for regional-scale vulnerability assessment of buildings [
66]. A complete list of this data is reported in
Figure 8. It is worth noting that a first section includes general information about the design period or the design seismic demand which are useful to perform the simulated design together with the layout of the roadway (e.g., road width, sidewalk width). Note that more than one value of the design class of concrete and steel can be specified to address the generation of model populations to consider the knowledge-based uncertainties.
4.4. Seismic Risk Calculation
A MATLAB (version R2018b) [
67] routine was designed to import the knowledge data of the bridge and perform the entire seismic risk assessment procedure. First, it carries out the generation of index-bridges, considering the residual uncertainties of the data collection process. Then, the simulated design of each index-bridge is automatically performed, the seismic assessment is carried out and the risk is quantified according to the calculation described in
Section 3. In this section, the main steps of the procedure applied to the bridge case study are discussed. Since the aim of this section is to better clarify the application of the procedure by means of the case study, the seismic analysis is performed in transverse direction only.
Since blueprints or design data are not available for the investigated case study, the material design classes and the steel reinforcements are considered as epistemic uncertainties. The design concrete characteristic strength () is supposed ranging between 25, 30 and 35 MPa. Two values of the characteristic yielding strength of the steel (), 375 and 440 MPa, are assumed, representative of the steel type FeB38k and FeB44k which were particularly spread in the design period in Italy.
Firstly, six index-bridges are generated (B1 to B6 in
Table 3). and the simulated designed is performed. Note that, in the past common practice, the design of transverse reinforcement in RC columns with large diameter was dictated by constructive rather than mechanical reason. This is because of the adopted shear capacity models which foresees that the shear stresses were almost entirely absorbed by the concrete. For this reason, the volumetric ratio (
) of the transverse reinforcement is retrieved by literature works that investigate similar bridge typologies in Italy [
68]. Each of the previously generated index bridges is modelled with two pre-determined values of
. The calculated amount of likely longitudinal reinforcement (
) together with the assumed value for transverse reinforcement (
) are reported in
Table 3. Design data, reinforcement ratio of the generated index bridges and results of the moment curvature analysis of the pier 1. In addition, the table lists the bilinear moment curvature law of the base section of the shortest pier (P1) calculated with CUMBIA [
69], where
and
are the yielding and ultimate curvatures and
and
are the yielding and ultimate moments. It is worth mentioning that the index-bridges having the design concrete strength equal to 25 MPa are deleted from the dataset, because the simulated design yields to values of reinforcements not compatible with the geometry of the piers and the code requirements.
The constitutive relations of the piers and deck-substructure connections are calculated in terms of force-displacement laws. Bilinear elastic-plastic laws are defined for the piers, while an elastic-perfectly plastic behavior is associated to neoprene bearings. The applied formulations are shown in
Table 4, together with the corresponding equations and the displacement-based damage states thresholds (
,
,
). These latter are defined consistently with [
68] and corresponds to slight, moderate and severe limit state. In the table,
and
are the yielding and ultimate displacements, whereas
and
are the yielding and ultimate shear forces. The formulations proposed in the table consider a flexural response of the piers. Preliminary analyses are conducted to exclude shear and buckling phenomena that may limit the ultimate flexure capacity of the piers. The deformative response of the abutment is neglected for the response in transverse direction.
The force-displacement relations are derived for each member and are aggregated to determine the response of the different subassemblies that compose the single index-bridge.
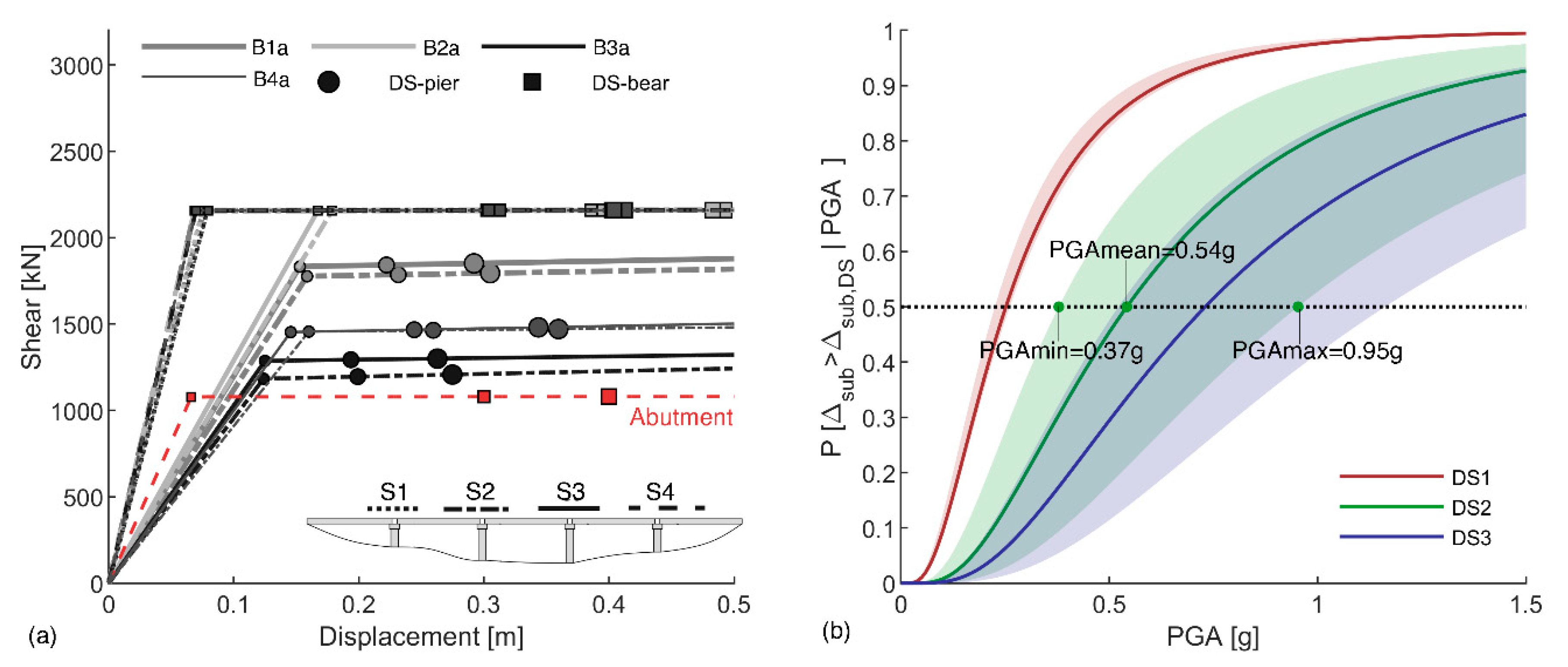
Figure 9a shows the capacity curves of the entire dataset of subassemblies (for all the index bridges) calculated in the transverse direction. In the figure, the F–D laws of the same subassembly (S1, S2, S3 and S4) among the different index bridges are indicated with the same line pattern. The markers indicate the DS thresholds of the subassembly: the squared markers indicate that the bearings determine the damage states, while the circular markers indicate that the piers are the critical element of the subassembly. The behavior of the deck-abutment subassemblies is indicated with the unique red-dashed line assuming no variability among the index-bridges. It is shown that the deck-pier connections determine the reaching of the different damage states for the subassemblies of the shortest piers (S1 and S4). The variation of the longitudinal reinforcement ratio in these piers induces a low variability in the elastic stiffness, with no differences in post-elastic phase. This is because of the slipping of the neoprene bearings which limit an increase of the total subassembly base shear over the shear strength of the deck-pier connection. On the contrary, in B1, B3 and B4 the tallest piers (S2 and S3) exhibit a lower shear strength with respect to the shear strength of the deck-pier connection system, reaching first the damage state. In the case of B2, the strength of the central piers enhances with the increase of the amount of longitudinal reinforcement and the bearings reach their maximum strength preventing the damage of the piers. The F–D laws of the bridges with the highest amount of reinforcements (B1b, B2b, B3b, B4b) are not shown since these are extremely similar to the F-D laws shown in
Figure 9a, although an increasing amount of transverse reinforcement postpones the displacement thresholds for DS2 and DS3. This is proved by the moment curvature laws reported in
Table 3.
The seismic assessment is performed according to the IPM. The seismic demand is expressed by elastic response spectra retrieved by the Italian Code for the bridge location and probability of exceedance of 50%, 10% and 5% in 50 years for the three damage states, respectively. The capacity in terms of PGA (
) is quantified for each subassembly and the minimum is identified as the capacity of the bridge
. This process is repeated for the three damage states.
Table 5 reports the value of
for the B1a and B2a index-bridges. In both the cases, the subassembly of the abutments and of the shortest piers determine the reaching of the bridge DS1. The subassemblies composed by the central pier are critical in terms of DS2 and DS3 for both the selected index bridges. However, it is evident that the capacity of B1, in which the damage state is achieved for the damage of the pier, is almost a half of the capacity of B2, in which the neoprene bearings determines the damage state of the subassembly. The
for B1a and B2a (evidenced in
Table 5) together with the PGA-based capacity for the other index-bridges are used to perform the fragility analysis of the investigated case study bridge in the transverse direction. The fragility of the bridge is represented by the area between the lognormal cumulative density functions having the medians equal to the minimum and maximum PGA (
and
) capacity (
Figure 9b). For simplicity, the logarithmic standard deviation is assumed equal to 0.7 [
60]. Moreover, the thick curves represent the mean fragility curve, whose logarithmic mean (
) is the average of the logarithmic PGA values of the single index-bridges.
The risk is calculated in terms of mean annual frequency of exceeding the limit states (
). The hazard curve for the location of the bridge is retrieved by means of the software REASSESS [
70].
Table 6 reports the value of the PGA-capacity, (minimum, maximum and average) and the corresponding value of seismic risk. High variability is registered for the seismic risk at DS2 and DS3. These are caused by the previously described strong variation of the PGA-based capacity depending on the critical component (e.g., piers or neoprene bearings). The mean value of the risk may be implemented in bridge management systems and used for risk prioritisation strategy within a bridge portfolio seismic assessment. The wide variation of risk is a proxy to address refined inspections to selected bridges within a bridge portfolio. As an example, this simplified procedure can be applied to analyze the risk of a given dataset of bridges with poor data accounting for epistemic uncertainties; thus targeted inspections (to determine the concrete/steel design strength of the constructive details) can be carried out in the cases in which more variation of risk is registered.
5. Conclusions
This work is framed in the general context of the data collection and structural safety assessment on existing bridges and viaducts. A methodology to perform inspections of RC bridges by means of Remote Piloted Aircrafts Systems oriented to a photogrammetry-based data collection is described. First, recommendations to perform the in-situ RPAS-data collection are proposed. Then, the procedure to analyze the 2D-images to achieve a 3D point cloud model of the bridge and extract the geometry of the critical components is presented. Moreover, a simplified procedure to calculate the seismic risk given the extracted geometry of the structural components of the bridge is presented. It does not resort to refined FEM approaches and can be applied with low computational effort, together with RPAS-inspections, to map the structural risk of bridge portfolios at road network scale. The procedure considers appropriately the epistemic uncertainties associated to constructive details which are not retrievable from the RPAS inspection by generating a population of index-bridges having the same deterministic data, while varying the uncertain parameters. The seismic performance analysis of the index bridges is performed with a simplified mechanic-based approach suitable for the wide-spread typology of simply-supported RC bridges. The seismic risk is calculated as the mean annual frequency to reach or exceed a given limit state.
The complete procedure, from the RPAS data acquisition to the seismic risk assessment, is applied on a six-spans bridge with RC single column piers and neoprene bearing devices.
The necessary data to perform the seismic risk assessment were arranged in a spreadsheet which is appropriately designed to represent the input data of a MATLAB-based programming routine. The procedure applied on the case study proves that the seismic performance of the analyzed bridge is strongly influenced by the mechanical behavior of both the piers and the bearing devices. This highlights that the RPAS surveys should accurately recognize the typologies and geometry of the deck-substructure connection system in bridges similar to the analyzed case study. Moreover, it is proved that the constructive details (i.e., the amount of steel reinforcements) which normally cannot be detected by visual inspections only, influence considerably the seismic performance of the bridge. The presented procedure can appropriately quantify the range of variability of the seismic risk linked to the epistemic uncertainties and can be applied to address targeted more refined data collections if high risk-based variability is registered.
Further developments should be oriented to enhance the potentialities of the RPAS data collection by means of automatic algorithms to extract and manage data for BIM storage or addressing analytical structural assessment processes. An extension of the procedure can be oriented to consider the degradation condition (which can be in turn included in BIM environment) in the mechanical modeling of the materials and its influence in the seismic fragility. Moreover, the simplified seismic assessment calculation should be tested for simply-supported bridges with different geometry and typology of deck-substructure connection to evaluate their risk and the role of any epistemic uncertainties. It is worth noting that other current-developed simplified assessment approaches suitable for other bridge typologies can be easily integrated in the proposed procedure. This will allow setting up a suitable tool to calculate the seismic risk within road networks where a wide variety of bridge typologies is presented.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}