
Critical Experiments for Structural Members of Micro Image Strain Sensing Sensor Based on Smartphone and Microscope


Abstract
:1. Introduction
2. Measurement Method and Principle
2.1. Method for Fabricating the Sensor
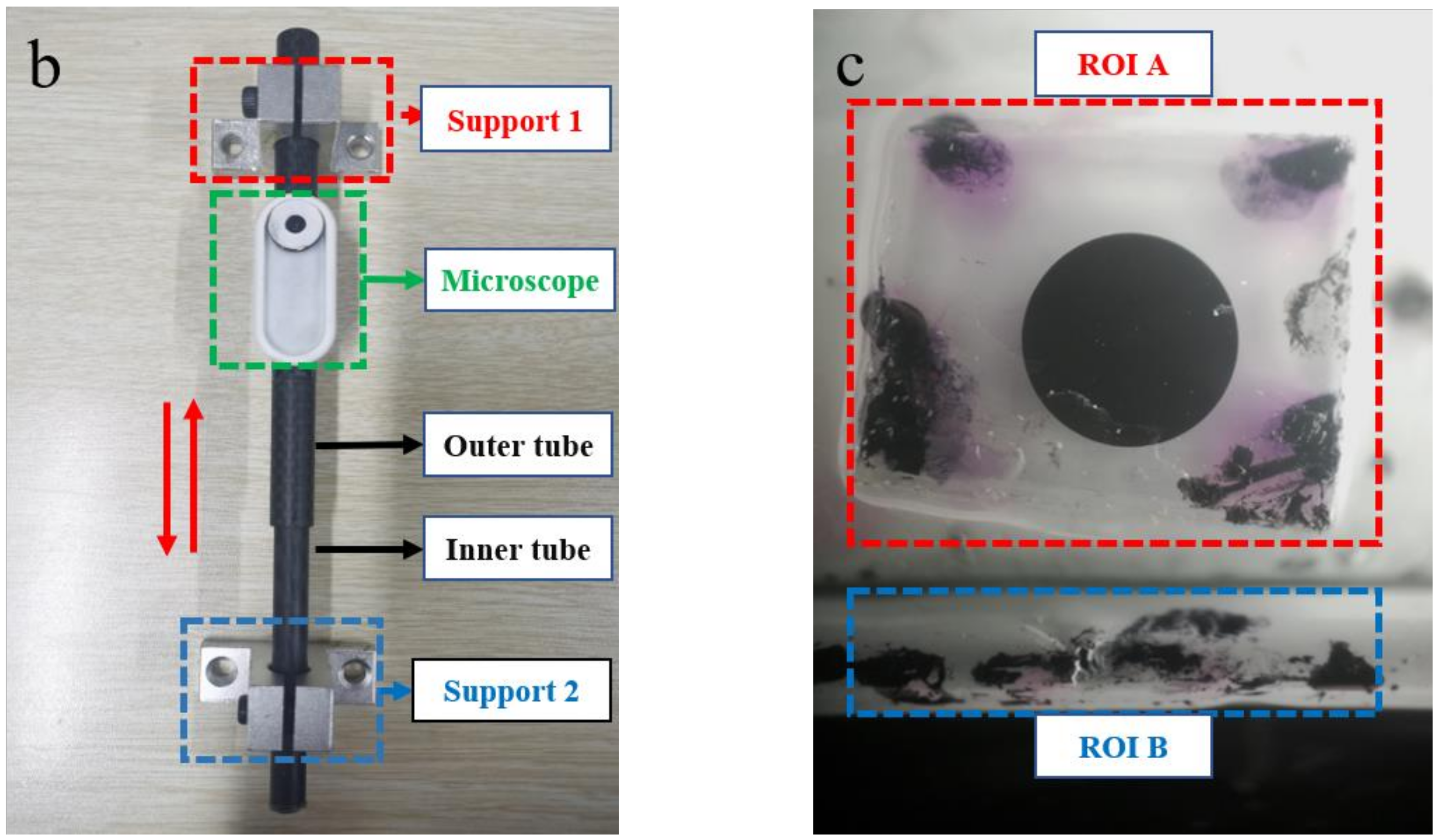
2.2. Fixing Device
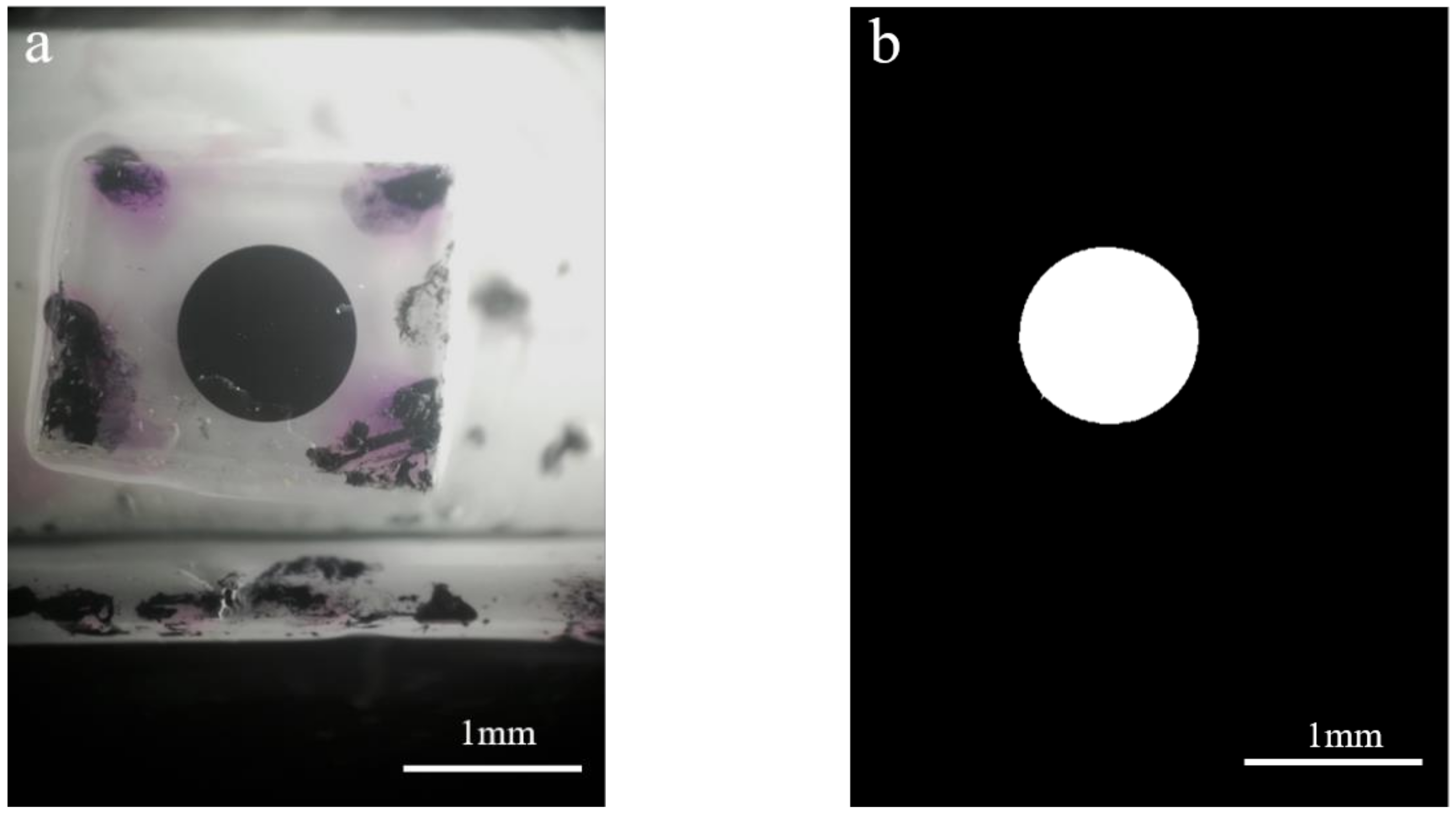
2.3. Sensing Principle
3. Experimental Details
3.1. Metallic Materials Tensile Test
3.2. Reinforced Concrete Beam Test
4. Measurement Results and Discussion
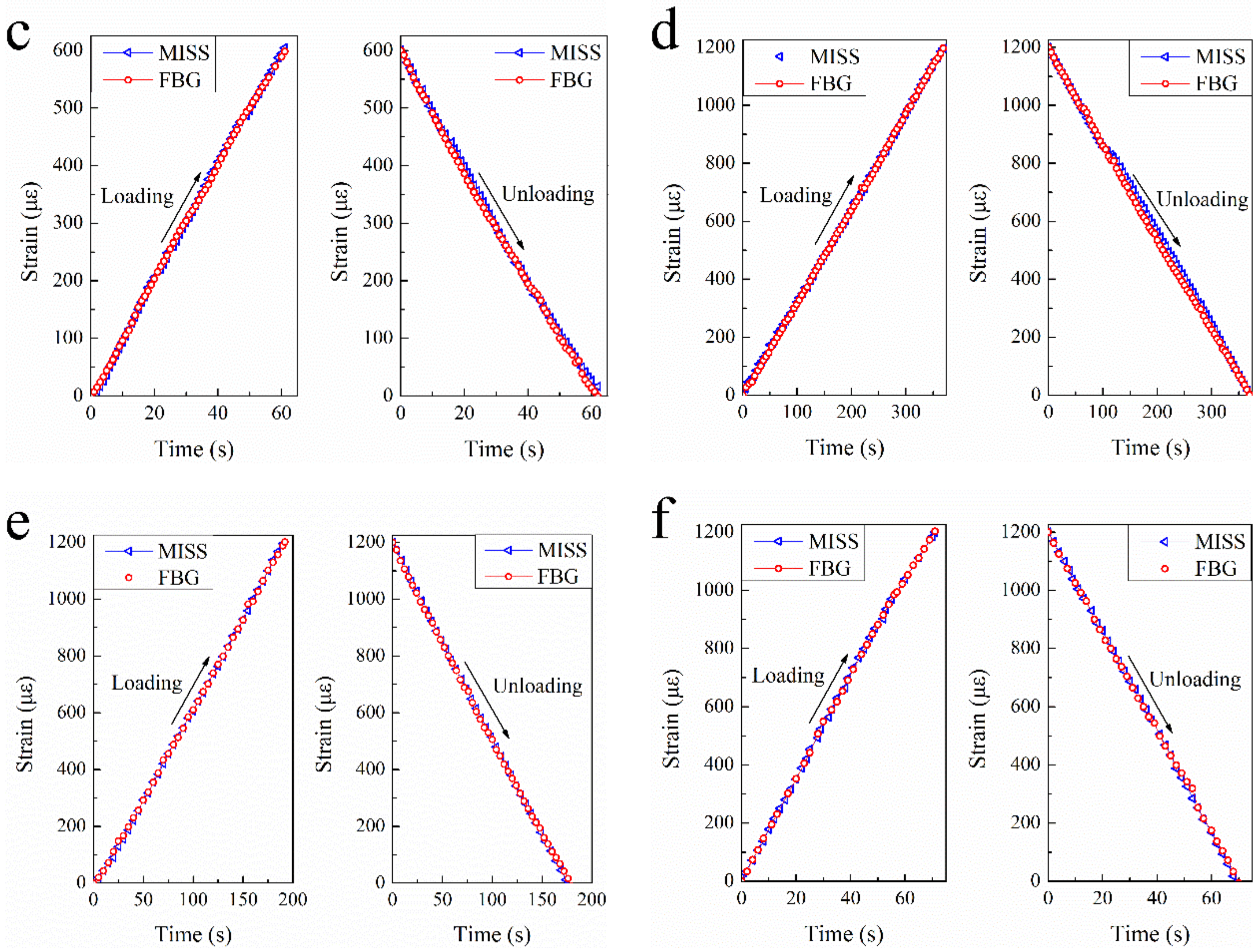
4.1. Metallic Materials Tensile Test
4.2. Reinforced Concrete Beam Structure
5. Conclusions
- 1.
- Metal tensile tests were carried out on various materials, loading speeds, and loading methods. It was found that the material of specimen and loading speeds had little effect on the measurement results. Under the two loading methods of graded loading and continuous loading, the MISS sensor can obtain the strain value of the specimens effectively. In the metal tensile test, the mean error is 7.1 με and the correlation coefficient is as high as 0.9997 between the FBG sensor and the MISS sensor measure results.
- 2.
- The strain measurement of the pure bending section of the RC beam further verified the effectiveness of the MISS sensor. The mean relative error of strain values is 2.5% in the reinforced concrete beam bending test.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Guo, S.L.; Wu, Z.S.; Zhang, Q.Q. Structural identification and damage detection through long-gauge strain measurements. Eng. Struct. 2015, 99, 173–183. [Google Scholar] [CrossRef]
- Scott, R.H.; Banerji, P.; Chikermane, S.; Srinivasan, S.; Basheer, P.A.M.; Surre, F.; Sun, T.; Grattan, K.T.V. Commissioning and Evaluation of a Fiber-Optic Sensor System for Bridge Monitoring. IEEE Sens. J. 2013, 13, 2555–2562. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.Y.; Liu, Y. Damage detection of bridges monitored within one cluster based on the residual between the cumulative distribution functions of strain monitoring data. Struct. Health Monit. 2020, 19, 1764–1789. [Google Scholar] [CrossRef]
- Tung, S.T.; Yao, Y.; Glisic, B. Sensing sheet: The sensitivity of thin-film full-bridge strain sensors for crack detection and characterization. Meas. Sci. Technol. 2014, 25, 075602. [Google Scholar] [CrossRef]
- Chung, D.D.L. Structural health monitoring by electrical resistance measurement. Smart Mater. Struct. 2001, 10, 624–636. [Google Scholar] [CrossRef]
- Ajovalasit, A. The Measurement of Large Strains Using Electrical Resistance Strain Gages. Exp. Tech. 2012, 36, 77–82. [Google Scholar] [CrossRef]
- dos Reis, J.; Costa, C.O.; da Costa, J.S. Strain gauges debonding fault detection for structural health monitoring. Struct. Control Health Monit. 2018, 25, e2264. [Google Scholar] [CrossRef]
- Feng, X.; Zhou, J.; Sun, C.; Zhang, X.; Ansari, F. Theoretical and Experimental Investigations into Crack Detection with BOTDR-Distributed Fiber Optic Sensors. J. Eng. Mech. 2013, 139, 1797–1807. [Google Scholar] [CrossRef]
- Ramakrishnan, M.; Rajan, G.; Semenova, Y.; Farrell, G. Overview of Fiber Optic Sensor Technologies for Strain/Temperature Sensing Applications in Composite Materials. Sensors 2016, 16, 99. [Google Scholar] [CrossRef] [Green Version]
- Kerrouche, A.; Boyle, W.J.O.; Sun, T.; Grattan, K.T.V. Design and in-the-field performance evaluation of compact FBG sensor system for structural health monitoring applications. Sens. Actuators A-Phys. 2009, 151, 107–112. [Google Scholar] [CrossRef]
- Di Sante, R. Fibre Optic Sensors for Structural Health Monitoring of Aircraft Composite Structures: Recent Advances and Applications. Sensors 2015, 15, 18666–18713. [Google Scholar] [CrossRef]
- Lee, H.M.; Choi, S.W.; Jung, D.-J.; Park, H.S. Analytical Model for Estimation of Maximum Normal Stress in Steel Beam-Columns Based on Wireless Measurement of Average Strains from Vibrating Wire Strain Gages. Comput.-Aided Civ. Infrastruct. Eng. 2013, 28, 707–717. [Google Scholar] [CrossRef]
- Lee, H.M.; Kim, J.M.; Sho, K.; Park, H.S. A wireless vibrating wire sensor node for continuous structural health monitoring. Smart Mater. Struct. 2010, 19, 055004. [Google Scholar] [CrossRef]
- Pan, B.; Qian, K.; Xie, H.; Asundi, A. Two-dimensional digital image correlation for in-plane displacement and strain measurement: A review. Meas. Sci. Technol. 2009, 20, 062001. [Google Scholar] [CrossRef]
- Kang, J.; Ososkov, Y.; Embury, J.D.; Wilkinson, D.S. Digital image correlation studies for microscopic strain distribution and damage in dual phase steels. Scr. Mater. 2007, 56, 999–1002. [Google Scholar] [CrossRef]
- Munoz, H.; Taheri, A.; Chanda, E.K. Pre-Peak and Post-Peak Rock Strain Characteristics During Uniaxial Compression by 3D Digital Image Correlation. Rock Mech. Rock Eng. 2016, 49, 2541–2554. [Google Scholar] [CrossRef]
- Pan, B. Digital image correlation for surface deformation measurement: Historical developments, recent advances and future goals. Meas. Sci. Technol. 2018, 29, 082001. [Google Scholar] [CrossRef]
- Bermudo Gamboa, C.; Martin-Bejar, S.; Trujillo Vilches, F.J.; Castillo Lopez, G.; Sevilla Hurtado, L. 2D-3D Digital Image Correlation Comparative Analysis for Indentation Process. Materials 2019, 12, 4156. [Google Scholar] [CrossRef] [Green Version]
- Sivasuriyan, A.; Vijayan, D.S.; Gorski, W.; Wodzynski, L.; Vaverkova, M.D.; Koda, E. Practical Implementation of Structural Health Monitoring in Multi-Story Buildings. Buildings 2021, 11, 263. [Google Scholar] [CrossRef]
- Tondolo, F.; Matta, E.; Quattrone, A.; Sabia, D. Experimental test on an RC beam equipped with embedded barometric pressure sensors for strains measurement. Smart Mater. Struct. 2019, 28, 055040. [Google Scholar] [CrossRef]
- Gregori, A.; Di Giampaolo, E.; Di Carlofelice, A.; Castoro, C. Presenting a New Wireless Strain Method for Structural Monitoring: Experimental Validation. J. Sens. 2019, 2019, 5370838. [Google Scholar] [CrossRef]
- Morgese, M.; Domaneschi, M.; Ansari, F.; Cimellaro, G.P.; Inaudi, D. Improving Distributed Fiber-Optic Sensor Measures by Digital Image Correlation: Two-Stage Structural Health Monitoring. ACI Struct. J. 2021, 118, 91–102. [Google Scholar]
- Alavi, A.H.; Jiao, P.; Buttlar, W.G.; Lajnef, N. Internet of Things-enabled smart cities: State-of-the-art and future trends. Measurement 2018, 129, 589–606. [Google Scholar] [CrossRef]
- Grossi, M. A sensor-centric survey on the development of smartphone measurement and sensing systems. Measurement 2019, 135, 572–592. [Google Scholar] [CrossRef]
- Vittorio, A.; Rosolino, V.; Teresa, I.; Vittoria, C.M.; Vincenzo, P.G. Automated sensing system for monitoring of road surface quality by mobile devices. Procedia-Soc. Behav. Sci. 2014, 111, 242–251. [Google Scholar] [CrossRef] [Green Version]
- Ozer, E.; Feng, M.Q. Synthesizing spatiotemporally sparse smartphone sensor data for bridge modal identification. Smart Mater. Struct. 2016, 25, 085007. [Google Scholar] [CrossRef]
- Zhao, X.; Han, R.; Ding, Y.; Yu, Y.; Guan, Q.; Hu, W.; Li, M.; Ou, J. Portable and convenient cable force measurement using smartphone. J. Civ. Struct. Health Monit. 2015, 5, 481–491. [Google Scholar] [CrossRef]
- Zhao, X.; Liu, H.; Yu, Y.; Zhu, Q.; Hu, W.; Li, M.; Ou, J. Displacement monitoring technique using a smartphone based on the laser projection-sensing method. Sens. Actuators A-Phys. 2016, 246, 35–47. [Google Scholar] [CrossRef]
- Jo, B.-W.; Lee, Y.-S.; Jo, J.H.; Khan, R.M.A. Computer Vision-Based Bridge Displacement Measurements Using Rotation-Invariant Image Processing Technique. Sustainability 2018, 10, 1785. [Google Scholar] [CrossRef] [Green Version]
- Yu, L.P.; Lubineau, G. A smartphone camera and built-in gyroscope based application for non-contact yet accurate off-axis structural displacement measurements. Measurement 2021, 167, 108449. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, P.; Zhao, X. Structural displacement monitoring based on mask regions with convolutional neural network. Constr. Build. Mater. 2021, 267, 120923. [Google Scholar] [CrossRef]
- Oraczewski, T.; Staszewski, W.J.; Uhl, T. Nonlinear acoustics for structural health monitoring using mobile, wireless and smartphone-based transducer platform. J. Intell. Mater. Syst. Struct. 2016, 27, 786–796. [Google Scholar] [CrossRef]
- Wang, N.; Zhao, X.; Zhao, P.; Zhang, Y.; Zou, Z.; Ou, J. Automatic damage detection of historic masonry buildings based on mobile deep learning. Autom. Constr. 2019, 103, 53–66. [Google Scholar] [CrossRef]
- Ratnam, M.M.; Ooi, B.Y.; Yen, K.S. Novel moire-based crack monitoring system with smartphone interface and cloud processing. Struct. Control Health Monit. 2019, 26, e2420. [Google Scholar] [CrossRef]
- Dzeng, R.-J.; Fang, Y.-C.; Chen, I.C. A feasibility study of using smartphone built-in accelerometers to detect fall portents. Autom. Constr. 2014, 38, 74–86. [Google Scholar] [CrossRef]
- Akhavian, R.; Behzadan, A.H. Smartphone-based construction workers’ activity recognition and classification. Autom. Constr. 2016, 71, 198–209. [Google Scholar] [CrossRef]
- Zhang, M.Y.; Cao, T.Z.; Zhao, X.F. Using Smartphones to Detect and Identify Construction Workers’ Near-Miss Falls Based on ANN. J. Constr. Eng. Manag. 2019, 145, 04018120. [Google Scholar] [CrossRef]
- Yu, L.P.; Pan, B. In-plane displacement and strain measurements using a camera phone and digital image correlation. Opt. Eng. 2014, 53, 054107. [Google Scholar] [CrossRef]
- Xie, B.; Chen, X.; Ding, M.; Zhou, G.; Zhao, X. Design and development of a new strain measuring method based on smartphone and machine vision. Measurement 2021, 182, 109724. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Wang, H.; Mirota, D.; Hager, G.D. A Generalized Kernel Consensus-Based Robust Estimator. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 178–184. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Performance Indicators |
|---|---|
| Sensor type | CMOS |
| Flashlight | The LED light |
| Effective pixels | 16 MP |
| Picture max resolution | 4608 × 3456 pixel |
| Video shooting | 1080 P (30 frames/sec) |
| Test Case | Specimen Material | Loading Process | Load (kN) |
|---|---|---|---|
| 1 | Steel | Staged loading | 10 |
| 2 | Aluminum | Staged loading | 10 |
| Test Case | Specimen Material | Loading Process | Loading Rate (mm/min) |
|---|---|---|---|
| 1 | Steel | Continuous loading | 0.1 |
| 2 | Steel | Continuous loading | 0.2 |
| 3 | Steel | Continuous loading | 0.5 |
| 4 | Aluminum | Continuous loading | 0.1 |
| 5 | Aluminum | Continuous loading | 0.2 |
| 6 | Aluminum | Continuous loading | 0.5 |
| Test Case | Specimen Material | Loading Rate (mm/min) | Mean Error (με) | Correlation Coefficient |
|---|---|---|---|---|
| 1 | Steel | 0.1 | 5.4 | 0.9998 |
| 2 | Steel | 0.2 | 5.0 | 0.9998 |
| 3 | Steel | 0.5 | 4.2 | 0.9997 |
| 4 | Aluminum | 0.1 | 7.6 | 0.9998 |
| 5 | Aluminum | 0.2 | 11.1 | 0.9998 |
| 6 | Aluminum | 0.5 | 9.3 | 0.9996 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Zhang, L.; Xie, B.; Zhou, G.; Zhao, X. Critical Experiments for Structural Members of Micro Image Strain Sensing Sensor Based on Smartphone and Microscope. Buildings 2022, 12, 212. https://doi.org/10.3390/buildings12020212
Chen X, Zhang L, Xie B, Zhou G, Zhao X. Critical Experiments for Structural Members of Micro Image Strain Sensing Sensor Based on Smartphone and Microscope. Buildings. 2022; 12(2):212. https://doi.org/10.3390/buildings12020212
Chicago/Turabian StyleChen, Xixian, Lixiao Zhang, Botao Xie, Guangyi Zhou, and Xuefeng Zhao. 2022. "Critical Experiments for Structural Members of Micro Image Strain Sensing Sensor Based on Smartphone and Microscope" Buildings 12, no. 2: 212. https://doi.org/10.3390/buildings12020212
APA StyleChen, X., Zhang, L., Xie, B., Zhou, G., & Zhao, X. (2022). Critical Experiments for Structural Members of Micro Image Strain Sensing Sensor Based on Smartphone and Microscope. Buildings, 12(2), 212. https://doi.org/10.3390/buildings12020212