
Simulation of Smartphone-Based Public Participation in Earthquake Structural Response Emergency Monitoring Using a Virtual Experiment and AI

 ,
,  ,
, 
Abstract
:1. Introduction
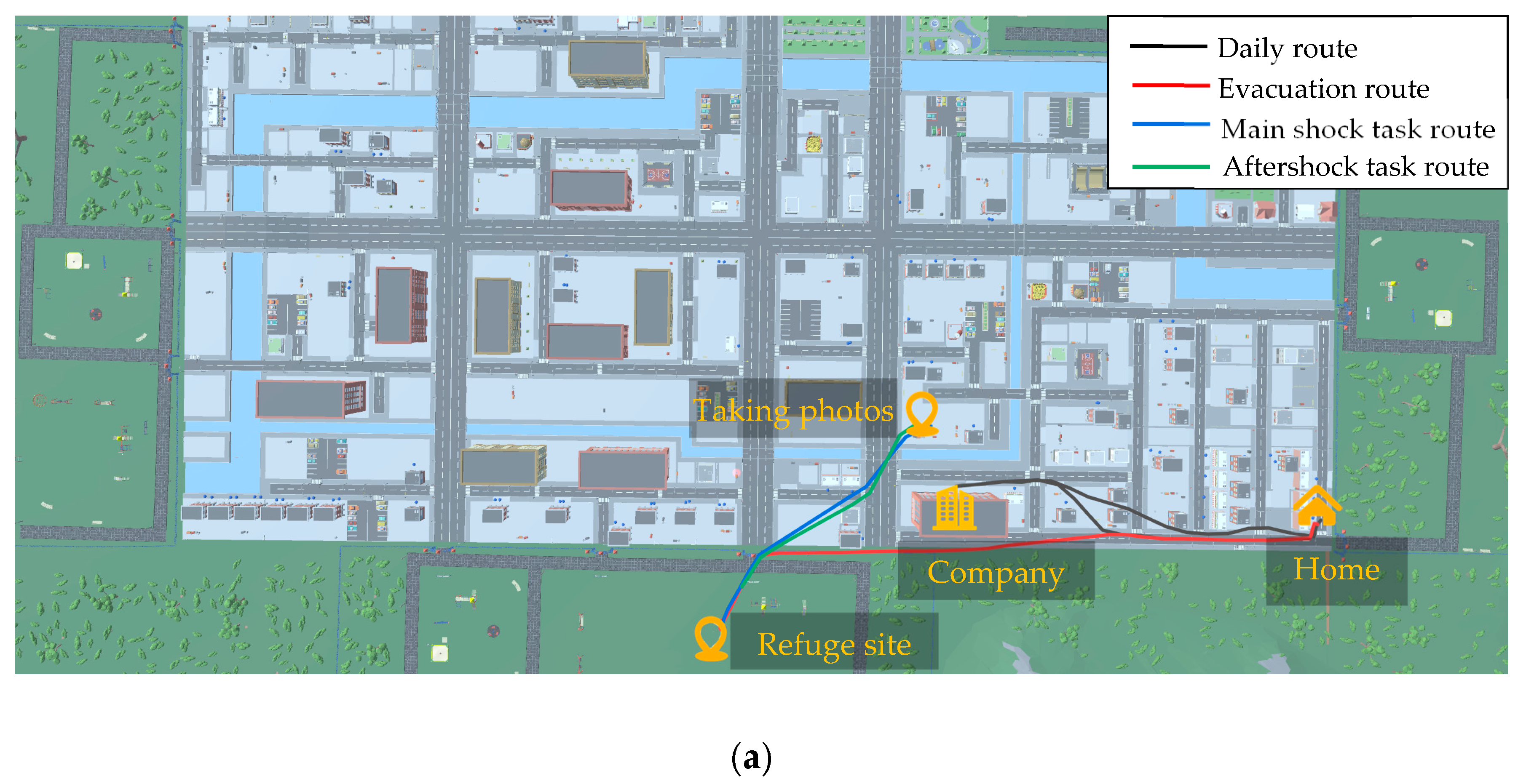
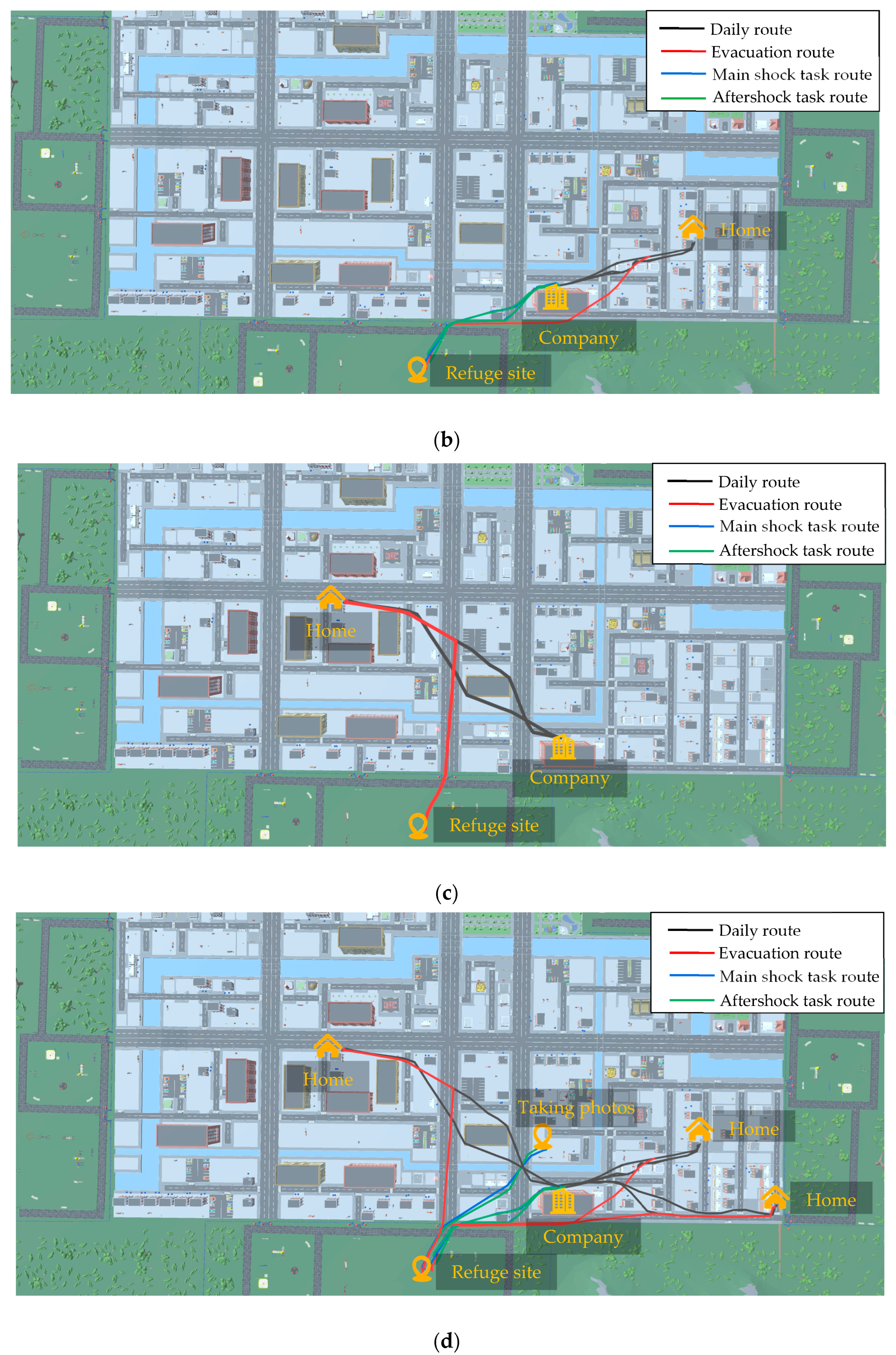
- Before the earthquake occurs, citizens act in a cycle of going to work and returning home.
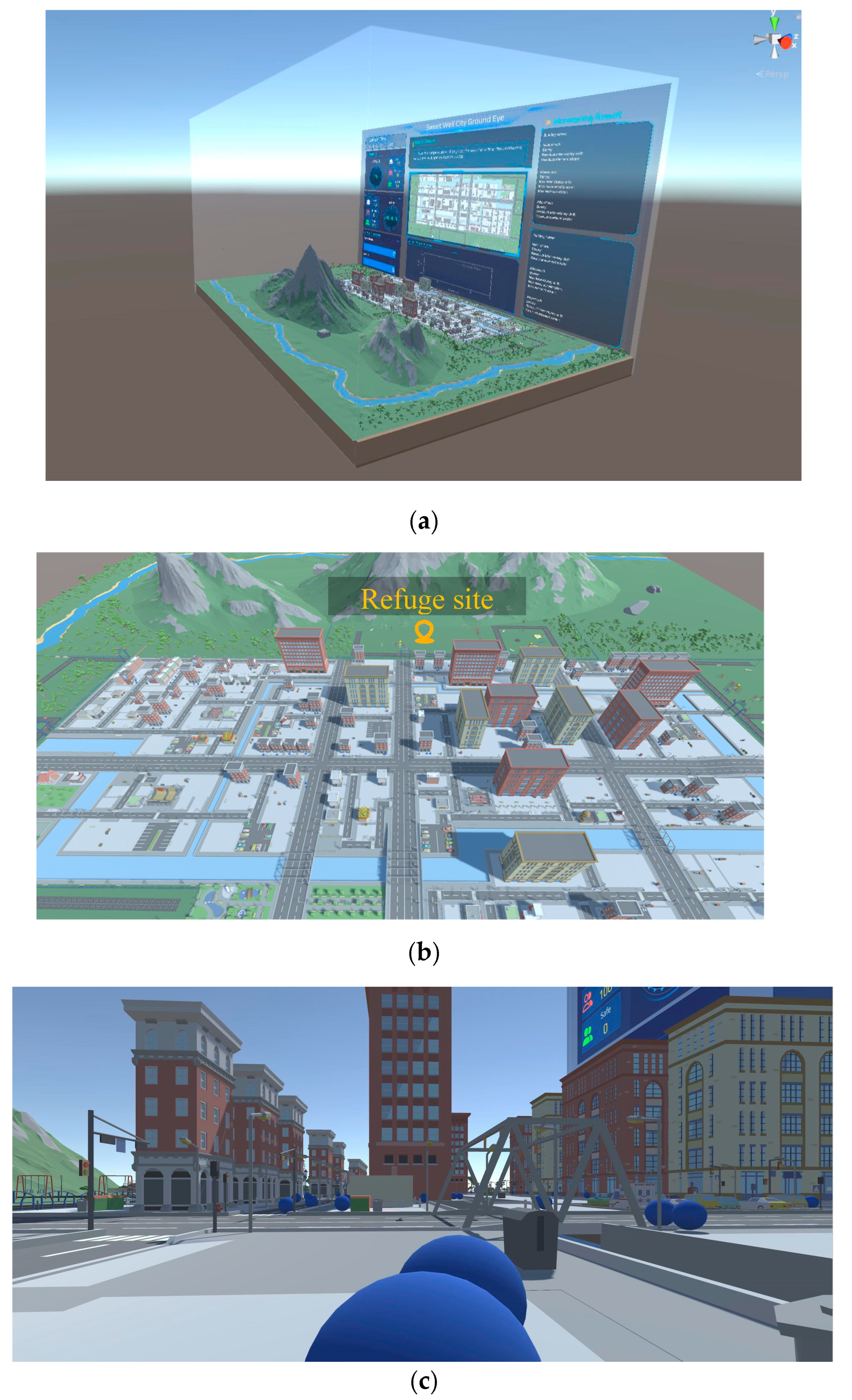
- As soon as the main shock occurs, the Ground Eye sends the routes to the refuge site to all citizens via smartphones, and citizens start moving to these sites.
- After the main shock ends, the Ground Eye calculates the maximum inter-story drift of all the buildings in that region via simplified models. Buildings with a maximum inter-story drift exceeding the code limit value are considered to be damaged, and require damage detection.
- The Ground Eye determines the task assignment for the citizens, and the locations of the damaged buildings are transmitted to the citizens’ smartphones. Then citizens locate the damaged buildings and perform their tasks, such as taking photos and installing the smartphones for monitoring. After finishing their job, they return to the refuge site, with the monitoring smartphones left in the damaged buildings. The residual deformation data is sent back to the Ground Eye.
- During the aftershock, the structural response time-history data collected by the in-site smartphones are sent back to the Ground Eye, while all the citizens remain in the refuge site.
- After the aftershock, the steps similar to those after the main shock are carried out, except the step of leaving the smartphones in the buildings for real-time monitoring. The Ground Eye analyzes all the data and conducts regional damage assessment.
- The idea that citizens can participate in earthquake response emergency monitoring via smartphones is presented, making it possible for large-scale monitoring and damage assessment of buildings at a city scale.
- The difficulty of realizing smartphone-based public participation in earthquake response emergency monitoring is circumvented via the virtual experiments, and further research can be conducted in advance.
- The simplified behavior models of citizens and the city brain are established, and a preliminary discussion of the information transmission between citizens and the city brain is presented. The whole process of taking refuge and monitoring is verified in a Unity scene. The simulation framework presented in this paper can be used in other SHM application scenarios using smartphones.
2. Materials and Methods
2.1. Basic Assumptions
- About the site: The rock layers under the city are continuous, uniform, and isotropic; the ground motion inputs at the bottom of all buildings are the same.
- About the buildings: The buildings will not collapse, so that citizens have no difficulty going into the buildings for monitoring, and the city roads will not be blocked by collapsed buildings.
- About the Ground Eye: A powerful city brain, Ground Eye, is already established in this city; it can predict which buildings may be damaged by calculation via simplified models. The data transmission between the citizens’ smartphones and the Ground Eye is in real-time.
- About citizen behavior: Citizens have access to the Ground Eye during the whole process and always follow its commands; the citizens will not be placed in danger during monitoring.
- About the time when the aftershock occurs: The interval between the main shock and the aftershock is enough for the citizens to finish their tasks and return to the refuge site.
- About the monitoring techniques of smartphones: There is no difficulty in collecting all the damage parameters; the reference data for residual deformation measurement are already acquired before the main shock.
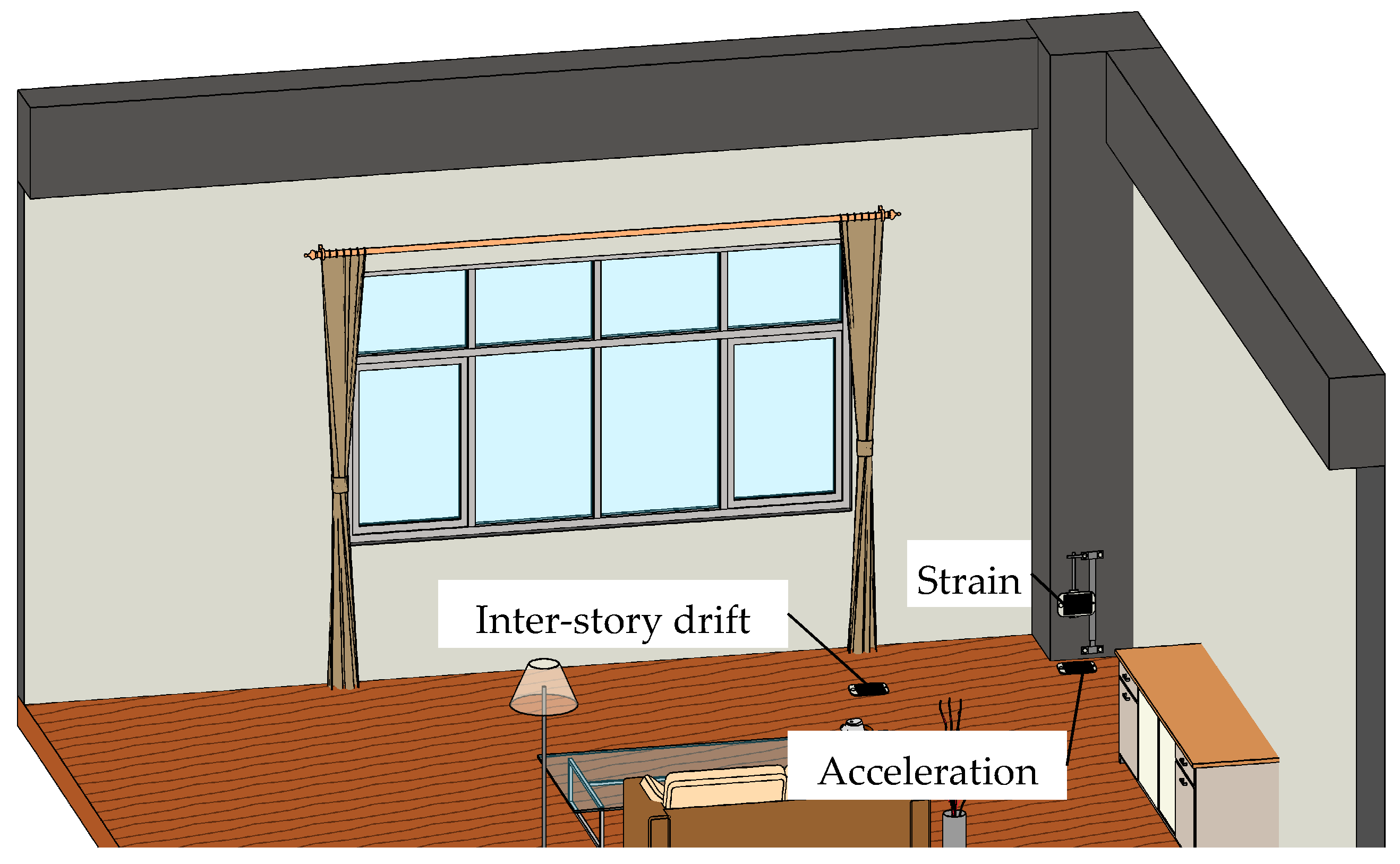
- About the arrangement of smartphones in the damaged structure: Only the floor with the largest maximum inter-story drift during the main shock is chosen for the installation of the smartphones. Three smartphones are necessary for monitoring this floor: one for node acceleration, one for inter-story drift, and one for element strain; this means that three citizens are enough to handle the monitoring task of a single damaged building. One column on the corner of that floor is selected to install the smartphones. The smartphone for acceleration measurement is installed on the slab near the bottom of this column. The smartphone for strain measurement is installed on the surface that is perpendicular to the earthquake propagation direction, and is near the bottom of this column. This is because, among the common destruction forms of columns during an earthquake, with the exception of shear destruction, which should be avoided in the design, the concrete cover at the two ends of the column usually cracks first, as shown in Figure 1.
2.2. The Response Parameters That Smartphones can Capture
2.2.1. Acceleration
2.2.2. Strain
2.2.3. Inter-Story Drift
2.3. Establishing the Scene in Unity
2.3.1. Overall Information
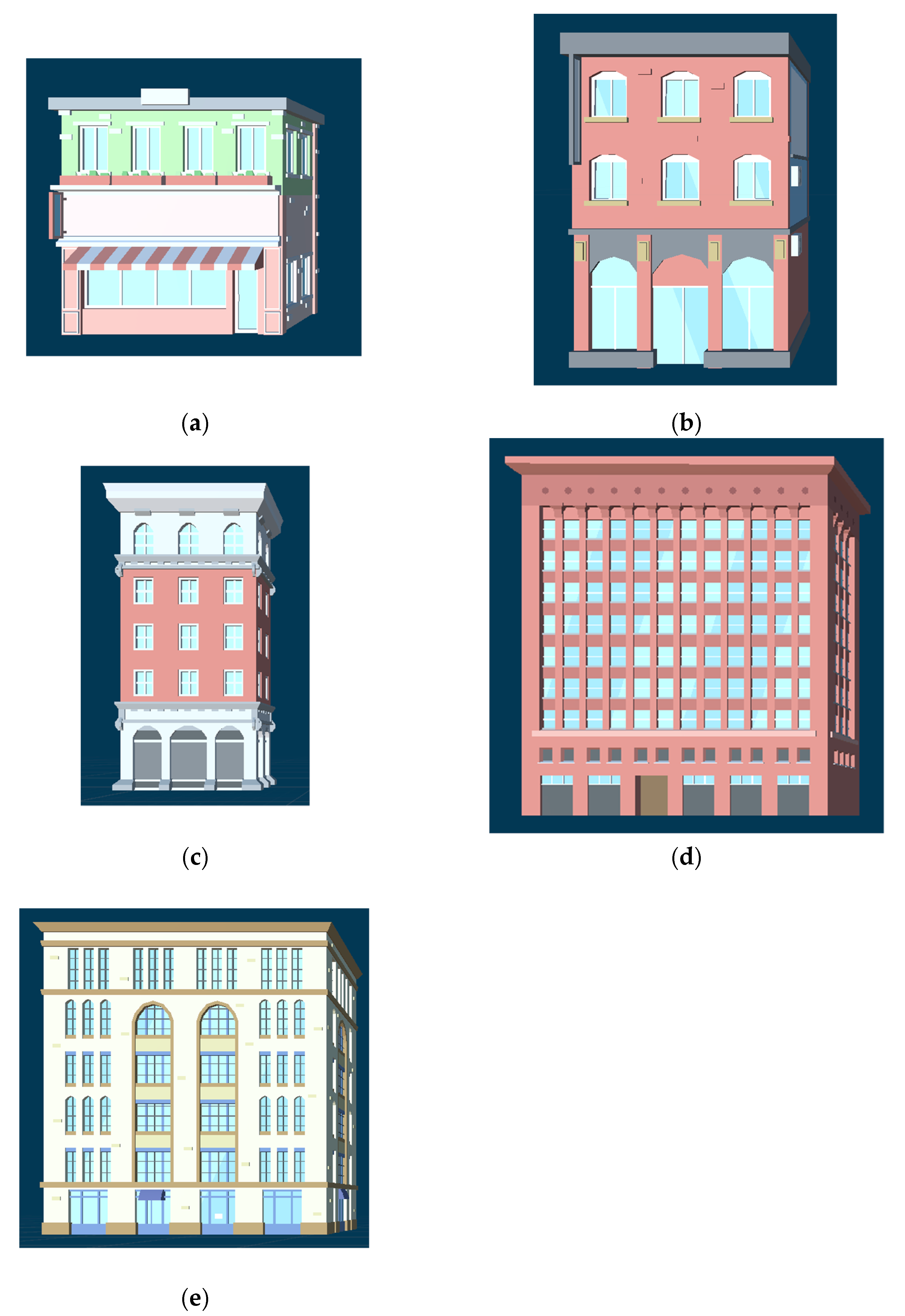
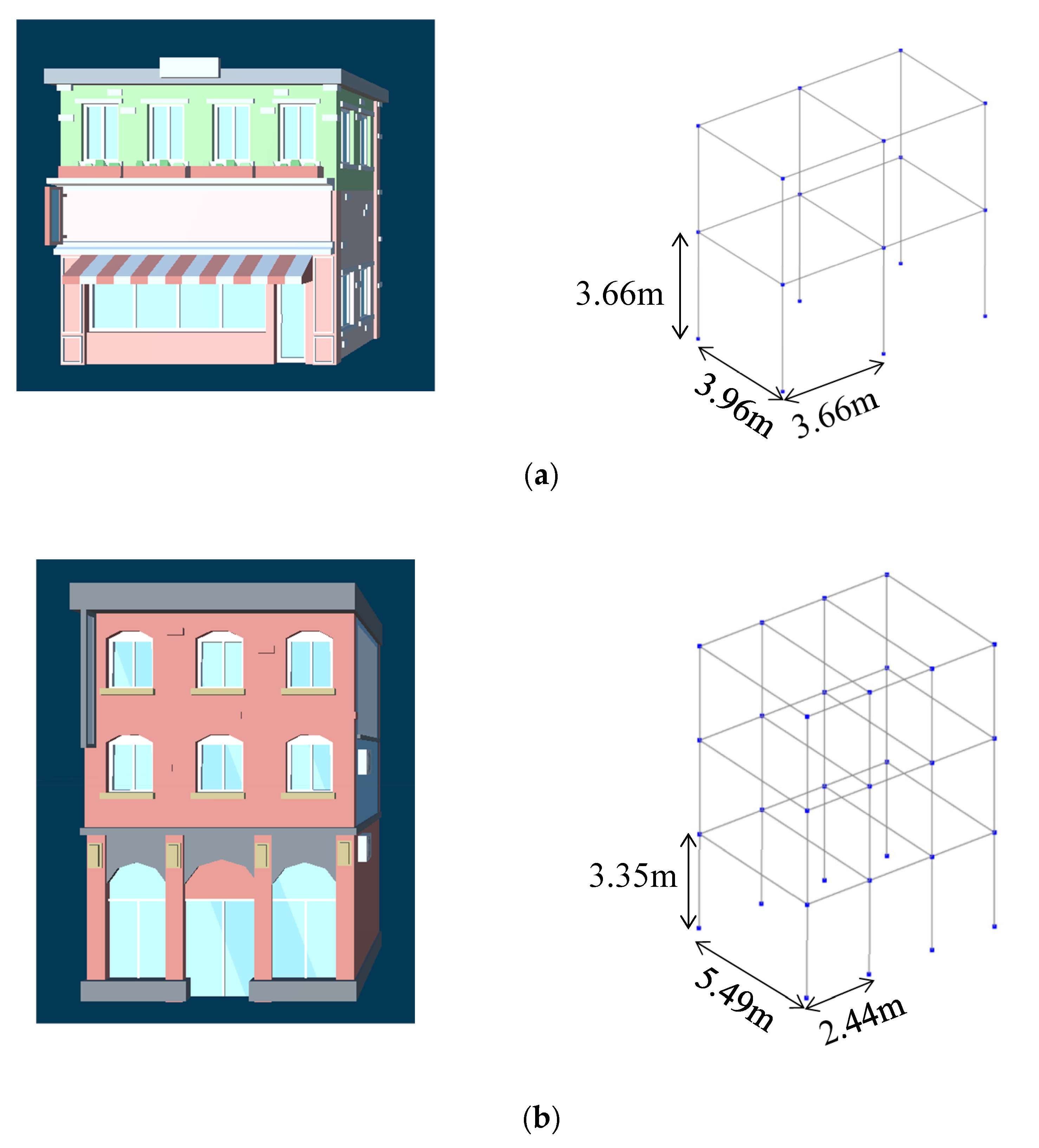
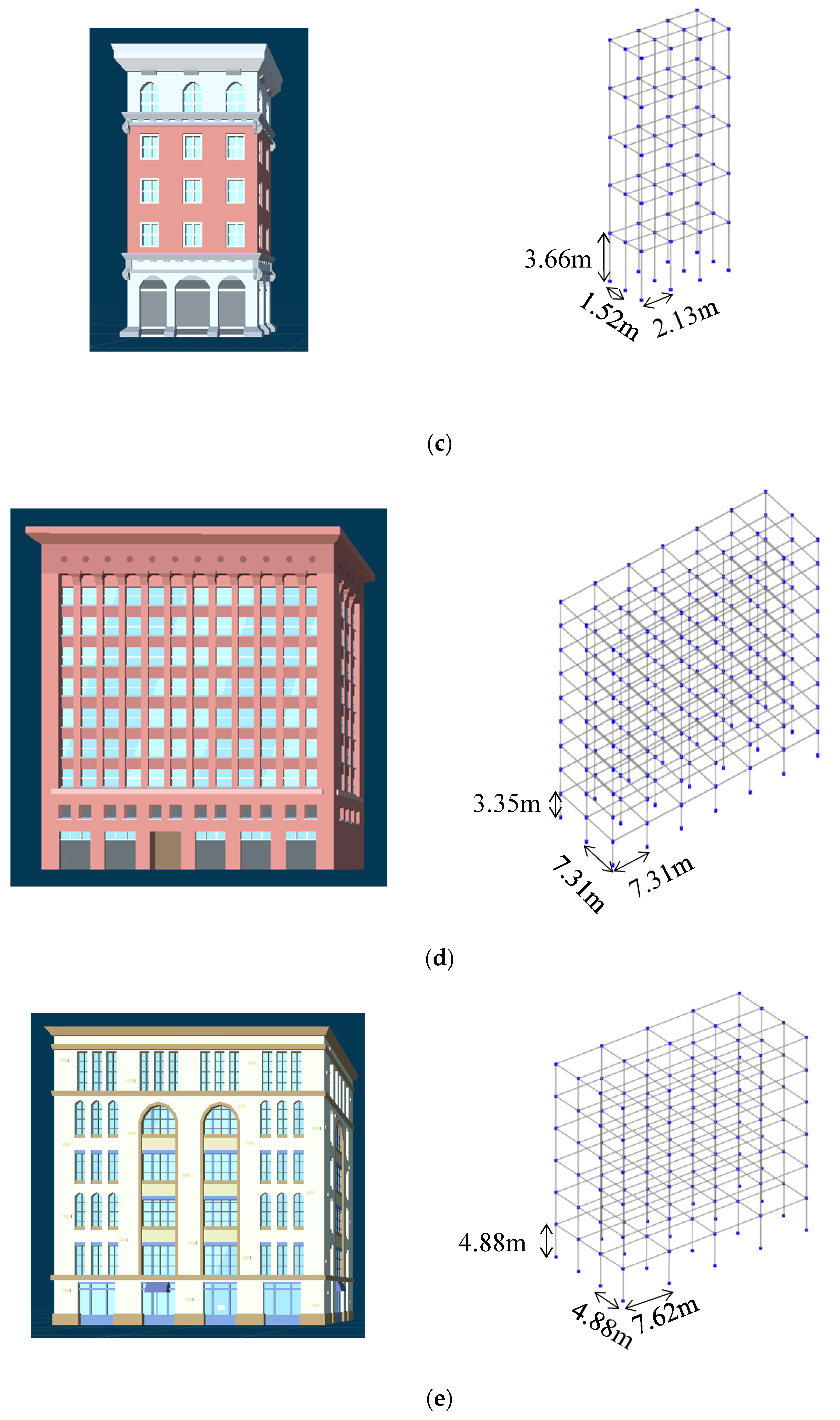
2.3.2. Buildings
2.3.3. Citizens
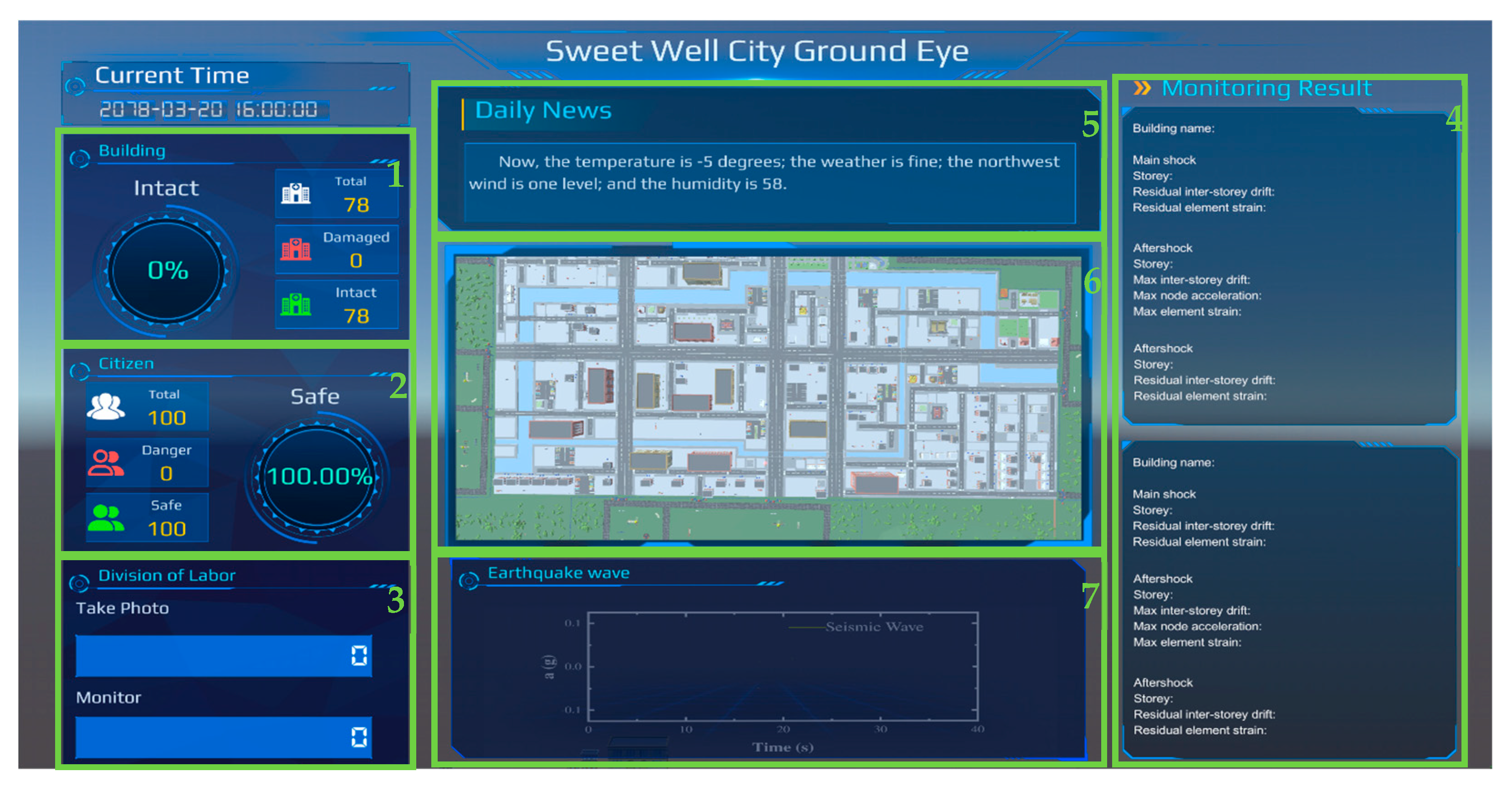
2.3.4. Ground Eye GUI
- Overall Building Information Module: This module exhibits the total number of buildings, the number of damaged buildings, the number of intact buildings, and the percentage of intact buildings. Each building is marked with a tag that represents the current condition of the building. Damaged buildings are marked “Damaged”, and undamaged buildings are marked “Intact”. The Ground Eye can obtain the overall damage information of city buildings in real-time by counting the tags via C# scripts.
- Citizen Information Module: This module exhibits the total number of citizens, the number of citizens outside the refuge site, the number of citizens in the refuge site, and the refuge rate. Each citizen is marked with a tag representing the citizen’s evacuation status. After the earthquake, the citizens who have not reached the shelter are marked as “Danger”, and the citizens who have reached the shelter are marked as “Safe”.
- Division of Labor Module: The number of citizens with different task divisions is summarized in this module. After the main shock or aftershock, the Ground Eye assigns the task of monitoring and photographing to the citizens in the shelter by changing their tags. The Ground Eye counts the number of citizens involved in each task via their tags in real-time.
- Building Monitoring Result Module: The monitoring results and photos of damaged buildings are displayed in this module. The contents of txt files generated by MATLAB are read by C# scripts and exhibited on the GUI.
- News Module: The daily news of the city is displayed in the News Module. After the earthquake, the News Module broadcasts warning information to alert citizens. The monitoring and evacuation process is also exhibited in this module.
- City Map Module: The city map is projected by the camera onto the control panel of the Ground Eye. The real-time location of the citizens can be observed in the City Map Module.
- Seismic Wave Module: The main shock and aftershock seismic waves are displayed cyclically in the Seismic Wave Module.
2.3.5. Realization of Taking Photos
2.4. OpenSees Calculation
- The rigid diaphragm assumption is adopted.
- Ground motions are input at all the support nodes (dynamic uniform earthquake ground motion).
- For nonlinear modeling assumptions, in this study, all beams and columns are fiber sections. The bond slip between the reinforcement and concrete at beam–column joints and in beam–column sections is neglected, and the shear deformation in beam–column elements is ignored. The reinforcement is evenly distributed around the concrete core, and the outside is covered with a concrete protective layer. The confinement effect of stirrups on the core concrete was taken into consideration. The materials of the concrete and reinforcement are Concrete02 and Steel02, respectively. The element type is a Force-based Beam–Column Element, and the number of Gaussian integration points for the non-linear curvature distribution is 5.
2.5. Design of the Behaviors of Citizens and the Ground Eye
2.5.1. Introduction of Behavior Tree
2.5.2. Realization of the Behaviors
- Citizens with CitizenID from 1 to 11 (11 in total) are assigned the task of taking photos. In detail, the citizen goes to the building which has the same ID number as his CitizenID. For example, citizen 1 should go to CompanyType1-1, and citizen 11 should go to CompanyType2-8.
- Citizens with CitizenID from 12 to 44 (33 in total) are assigned the task of monitoring, and 3 citizens are each responsible for a damaged building. The remainder of CitizenID is checked to determine if it can be divided by 11, 22, or 33. The citizen goes to the building whose BuildingID is equal to this remainder. For example, citizen 12 should go to CompanyType1-1, citizen 24 should go to CompanyType1-2, and citizen 36 should go to CompanyType1-3.
- Citizens with CitizenID from 45 to 100 (56 in total) do not have any tasks. They stay in the refuge site after the main shock.
3. Results
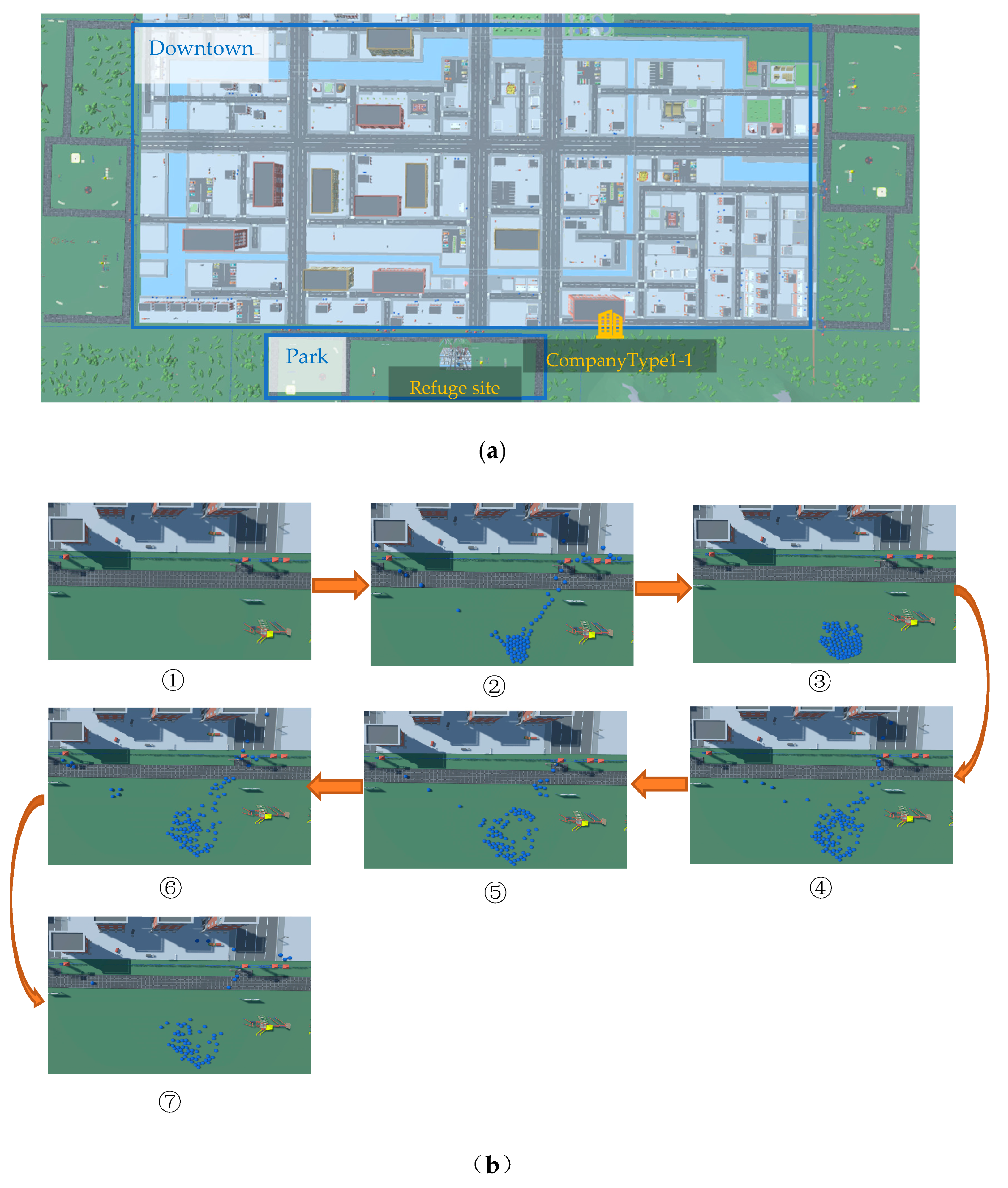
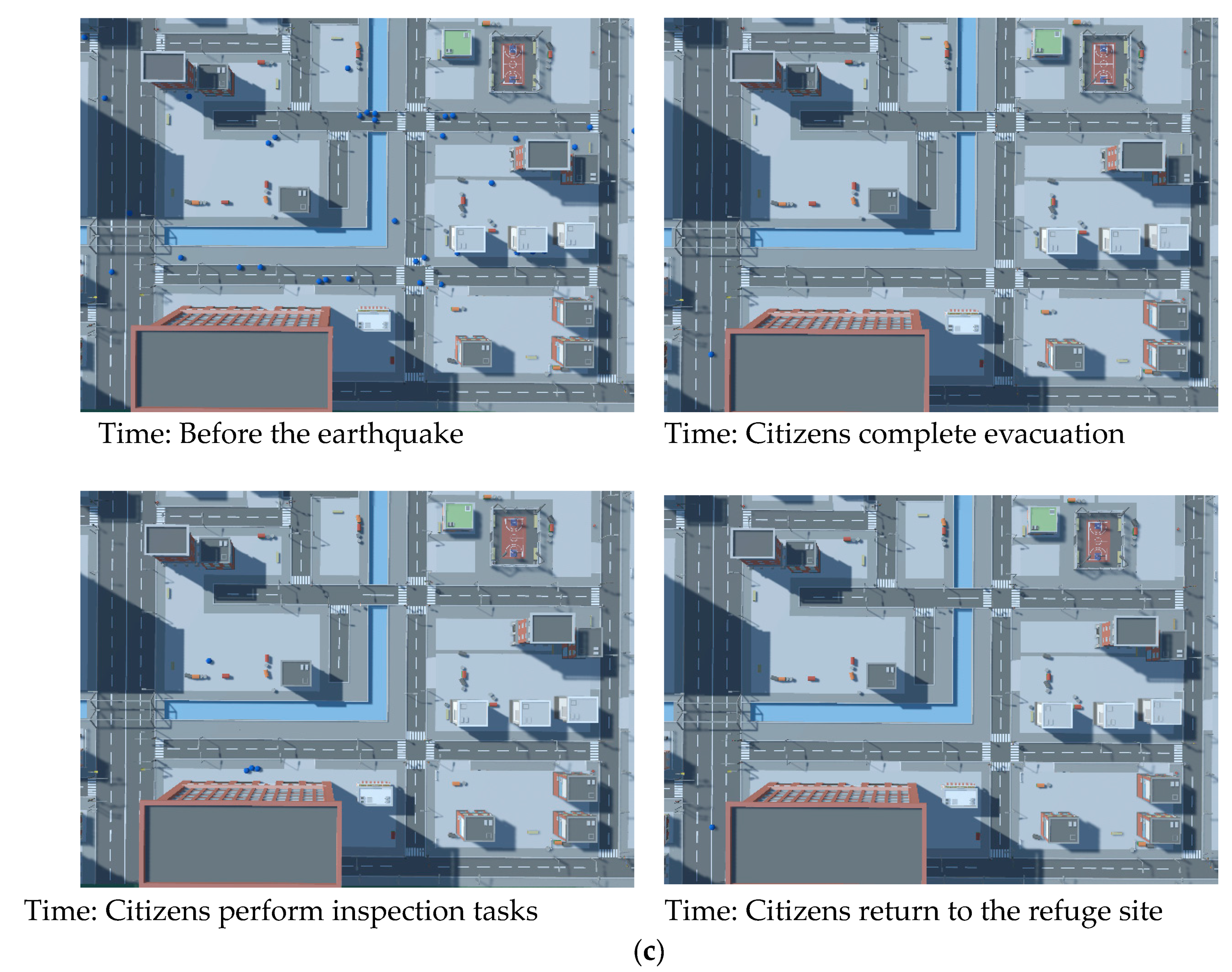
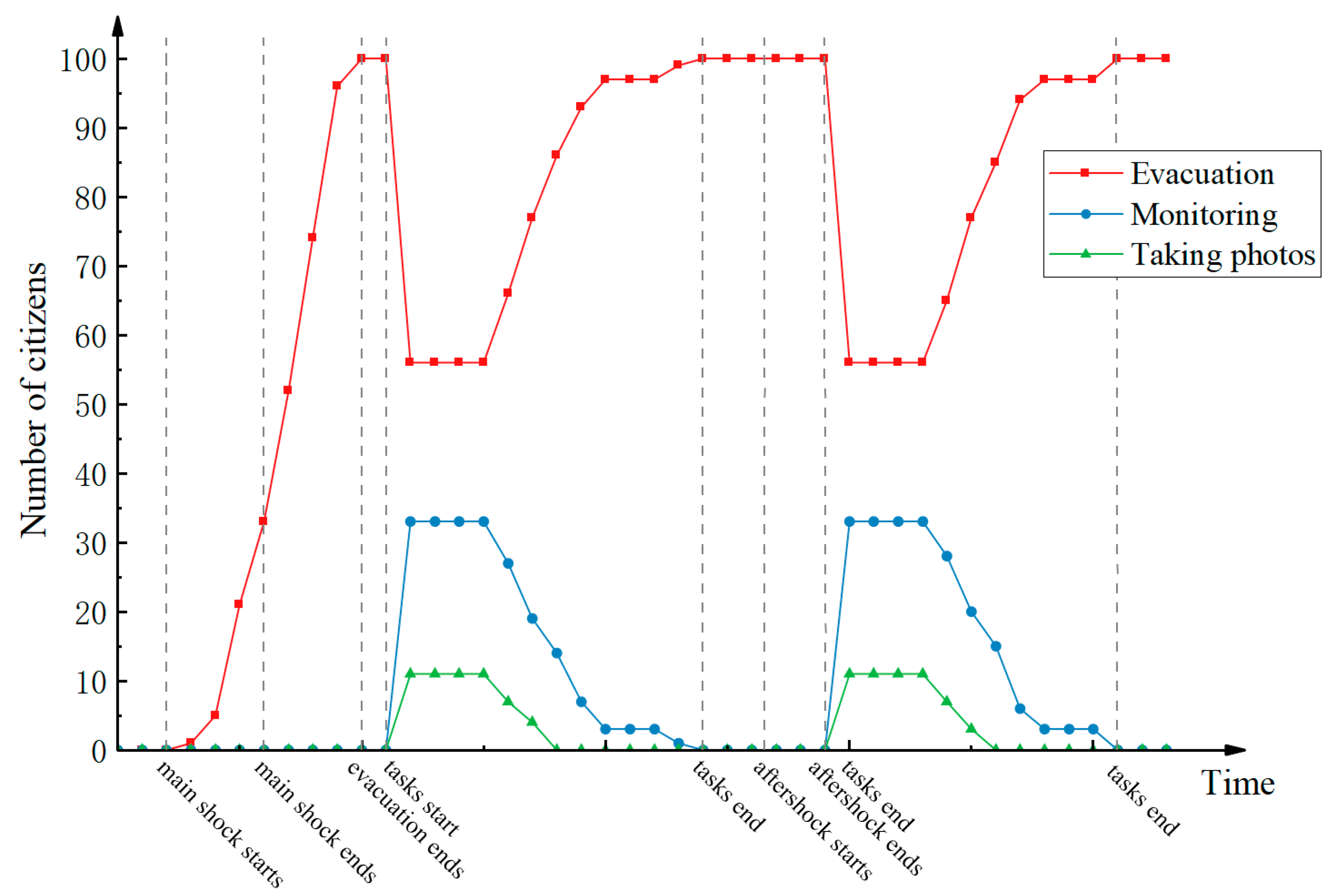
3.1. Distribution of Citizens
- Before the main shock, citizens lived and worked normally in the city, and the number of citizens in the refuge area is 0.
- When the main shock occurred, citizens received the alarm and evacuation route delivered by the Ground Eye. The number of citizens in the refuge site increased as citizens moved to the refuge site.
- All citizens reach the refuge site and the number of citizens in the refuge site is equal to the total number of citizens in Sweet Well City.
- The Ground Eye assigns inspection tasks for citizens and transmits the location of damaged buildings to citizens’ smartphones. Citizens leave the refuge site to perform the task of inspecting buildings.
- Citizens return to the refuge site after completing their inspection tasks.
- The aftershock occurs in Sweet Well City. The Ground Eye once again assigns tasks to citizens. Citizens leave the refuge site to carry out inspection tasks.
- Citizens complete the task of inspecting buildings after the aftershock and return to the refuge site.
3.2. Routes of Citizens
3.3. Change in the Number of Citizens with Different Tasks
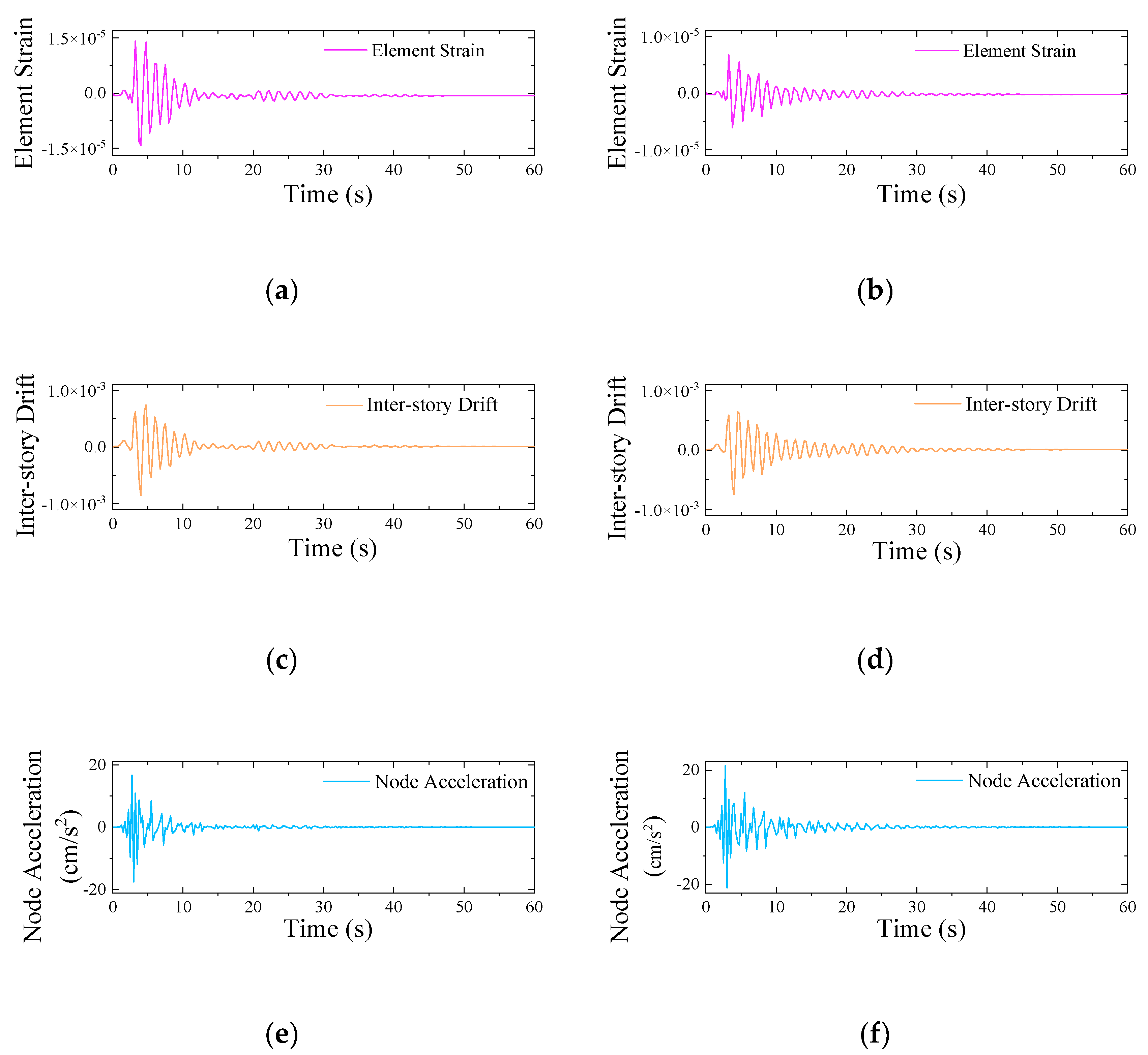
3.4. Structural Response
4. Discussion
- More complex behavior model, or AI, of the citizens. In the future, different types of behavior models of humans in sociology shall be adopted, which describe probabilistic models of citizen behavior in various environments; for example, whether the citizens follow the commands of the city brain, or the priority of women and children in an evacuation.
- Cooperation and information transmission between different groups of agents. In this research, only the communication between citizens and the Ground Eye is considered, thus neglecting the possible influence on efficiency due to cooperation.
- Frameworks of the Ground Eye.
- Introduction of reinforcement learning. The logic of citizens and the Ground Eye is fixed in this research; however, there is a possible method in which the agents can interact with the environment and identify a more efficient approach.
- Some of the citizens may be able to be manipulated by the operator, and thus cooperate with all other citizens to perform the earthquake emergency response and structural health monitoring tasks. Due to the sociology and reinforcement learning this would involve, the behavior of the agents/citizens will be more complex, and possibly closer to reality. Together with the operator, we may gain more insights into public emergency response monitoring.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Raghunandan, M.; Liel, A.B.; Luco, N. Aftershock collapse vulnerability assessment of reinforced concrete frame structures. Earthq. Eng. Struct. Dyn. 2015, 44, 419–439. [Google Scholar] [CrossRef]
- Spencer, B.F. Opportunities and challenges for smart sensing technology. In Proceedings of the 1st International Conference on Structural Health Monitoring and Intelligent Infrastructure, Tokyo, Japan, 13–15 November 2003. [Google Scholar]
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Ozer, E.; Feng, M.Q.; Feng, D. Citizen Sensors for SHM: Towards a Crowdsourcing Platform. Sensors 2015, 15, 14591–14614. [Google Scholar] [CrossRef] [PubMed]
- Can, Z.; Demirbas, M. Smartphone-based data collection from wireless sensor networks in an urban environment. J. Netw. Comput. Appl. 2015, 58, 208–216. [Google Scholar] [CrossRef]
- Yu, Y.; Zhao, X.; Ou, J. A new idea: Mobile structural health monitoring using Smart phones. In Proceedings of the 2012 Third International Conference on Intelligent Control and Information Processing, Dalian, China, 15–17 July 2012. [Google Scholar]
- Dashti, S.; Reilly, J.; Bray, J.D.; Bayen, A.; Glaser, S.; Mari, E.; Bray, P.J. iShake: Using Personal Devices to Deliver Rapid Semi-Qualitative Earthquake Shaking Information; GeoEngineering Report; Department of Civil and Environment Engineering, University of California: Berkeley, CA, USA, 2011. [Google Scholar]
- Vittorio, A.; Rosolino, V.; Teresa, I.; Vittoria, C.M.; Vincenzo, P.G. Automated sensing system for monitoring of road surface quality by mobile devices. Procedia-Soc. Behav. Sci. 2014, 111, 242–251. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Han, R.; Ding, Y.; Yu, Y.; Guan, Q.; Hu, W.; Li, M.; Ou, J. Portable and convenient cable force measurement using smartphone. J. Civ. Struct. Health Monit. 2015, 5, 481–491. [Google Scholar] [CrossRef]
- Shrestha, A.; Dang, J.; Wang, X. Development of a smart-device-based vibration-measurement system: Effectiveness examination and application cases to existing structure. Struct. Control Health Monit. 2018, 25, e2120. [Google Scholar] [CrossRef]
- Jo, B.-W.; Lee, Y.-S.; Jo, J.H.; Khan, R.M.A. Computer Vision-Based Bridge Displacement Measurements Using Rotation-Invariant Image Processing Technique. Sustainability 2018, 10, 1785. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zhao, X.; Liu, P. Multi-Point Displacement Monitoring Based on Full Convolutional Neural Network and Smartphone. Ieee Access 2019, 7, 139628–139634. [Google Scholar] [CrossRef]
- Li, J.; Xie, B.; Zhao, X. Measuring the interstory drift of buildings by a smartphone using a feature point matching algorithm. Struct. Control Health Monit. 2020, 27, e2492. [Google Scholar] [CrossRef]
- Pan, B.; Qian, K.; Xie, H.; Asundi, A. Two-dimensional digital image correlation for in-plane displacement and strain measurement: A review. Meas. Sci. Technol. 2009, 20, 062001. [Google Scholar] [CrossRef]
- Pan, B. Digital image correlation for surface deformation measurement: Historical developments, recent advances and future goals. Meas. Sci. Technol. 2018, 29, 082001. [Google Scholar] [CrossRef]
- Xie, B.; Chen, X.; Ding, M.; Zhou, G.; Zhao, X. Design and development of a new strain measuring method based on smartphone and machine vision. Measurement 2021, 182, 109724. [Google Scholar] [CrossRef]
- Oraczewski, T.; Staszewski, W.J.; Uhl, T. Nonlinear acoustics for structural health monitoring using mobile, wireless and smartphone-based transducer platform. J. Intell. Mater. Syst. Struct. 2016, 27, 786–796. [Google Scholar] [CrossRef]
- Wang, N.; Zhao, X.; Zhao, P.; Zhang, Y.; Zou, Z.; Ou, J. Automatic damage detection of historic masonry buildings based on mobile deep learning. Autom. Constr. 2019, 103, 53–66. [Google Scholar] [CrossRef]
- Ruggieri, S.; Cardellicchio, A.; Leggieri, V.; Uva, G. Machine-learning based vulnerability analysis of existing buildings. Autom. Constr 2021, 132, 103936. [Google Scholar] [CrossRef]
- Li, J.; Zhao, X.; Zhou, G.; Zhang, M. Standardized use inspection of workers’ personal protective equipment based on deep learning. Saf. Sci. 2022, 150, 105689. [Google Scholar] [CrossRef]
- Akhavian, R.; Behzadan, A.H. Smartphone-based construction workers’ activity recognition and classification. Autom. Constr. 2016, 71, 198–209. [Google Scholar] [CrossRef]
- Genders, W.; Wang, J.; Razavi, S. Smartphone construction safety awareness system: A cyber-physical system approach. In Proceedings of the 16th International Conference on Computing in Civil and Building Engineering (ICCCBE2016), Osaka, Japan, 6–8 July 2016. [Google Scholar]
- Han, R.; Zhao, X.; Yu, Y.; Guan, Q.; Hu, W.; Li, M. A Cyber-Physical System for Girder Hoisting Monitoring Based on Smartphones. Sensors 2016, 16, 1048. [Google Scholar] [CrossRef] [Green Version]
- Dzeng, R.-J.; Fang, Y.-C.; Chen, I.C. A feasibility study of using smartphone built-in accelerometers to detect fall portents. Autom. Constr. 2014, 38, 74–86. [Google Scholar] [CrossRef]
- BMW Applies Real-Time 3D to Autonomous Driving. Available online: https://unity.cn/madewithunity/bmw (accessed on 11 March 2022).
- VR Reduces Risk and Improves Operator Safety. Available online: https://unity.cn/madewithunity/skanska (accessed on 11 March 2022).
- Mixed Reality Surgical Training with the VirtaMed LaparoS Simulator. Available online: https://blog.unity.com/manufacturing/mixed-reality-surgical-training-with-the-virtamed-laparos-simulator (accessed on 11 March 2022).
- HTX Labs uses Unreal Engine to Develop Immersive VR Training Simulations. Available online: https://www.unrealengine.com/zh-CN/spotlights/htx-labs-delivers-immersive-vr-training-simulations-using-unreal-engine (accessed on 11 March 2022).
- Raising the Next Generation of Biologists with a Virtual Lab. Available online: https://www.unrealengine.com/zh-CN/spotlights/virtual-lab-ushers-in-next-generation-of-biologists (accessed on 11 March 2022).
- Miranda, E. Approximate seismic lateral deformation demands in multistory buildings. J. Struct. Eng. 1999, 125, 417–425. [Google Scholar] [CrossRef]
- Xiong, C.; Lu, X.Z.; Guan, H.; Xu, Z. A nonlinear computational model for regional seismic simulation of tall buildings. Bull. Earthq. Eng. 2016, 14, 1047–1069. [Google Scholar] [CrossRef]
- PEER Ground Motion Database. Available online: https://ngawest2.berkeley.edu/ (accessed on 6 April 2022).
- Agis, R.A.; Gottifredi, S.; Garcia, A.J. An event-driven behavior trees extension to facilitate non-player multi-agent coordination in video games. Expert Syst. Appl. 2020, 155, 113457. [Google Scholar] [CrossRef]
- Vukobratović, V.; Ruggieri, S. Floor Acceleration Demands in a Twelve-Storey RC Shear Wall Building. Buildings 2021, 11, 38. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Number | Size |
|---|---|---|
| HomeType1 | 14 | 7.3 × 4.0 × 7.3 m3 |
| HomeType2 | 25 | 7.3 × 5.5 × 10.1 m3 |
| HomeType3 | 28 | 6.4 × 3.0 × 18.3 m3 |
| Type | Number | Size |
|---|---|---|
| CompanyType1 | 3 | 43.9 × 14.6 × 30.2 m3 |
| CompanyType2 | 8 | 30.5 × 14.6 × 29.3 m3 |
| Timeline | Response Parameters |
|---|---|
| During the Main Shock | Max. Inter-story Drift (Estimation) |
| After the Main Shock | Residual Inter-story Drift |
| Element Residual Strain | |
| During the Aftershock | Max. Inter-story Drift |
| Max. Node Acceleration | |
| Max. Element Strain | |
| After the Aftershock | Residual Inter-story Drift |
| Element Residual Strain |
| Parameter | CompanyType1-1 | CompanyType2-1 | |
|---|---|---|---|
| Main shock | Residual inter-story drift | 1.06 × 10−5 | 7.28 × 10−6 |
| Residual element strain | −1 × 10−6 | −1 × 10−6 | |
| Aftershock | Max. inter-story drift | −8.12 × 10−4 | −7.50 × 10−4 |
| Max. node acceleration (cm/s2) | −17.52 | 21.61 | |
| Max. element strain | −1.46 × 10−5 | 6.80 × 10−6 | |
| Residual inter-story drift | 1.06 × 10−5 | 7.44 × 10−6 | |
| Residual element strain | −1 × 10−6 | −1 × 10−6 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Chen, X.; Chen, H.; Wang, B.; Li, W.; Liu, S.; Li, P.; Qi, Z.; He, Z.; Zhao, X. Simulation of Smartphone-Based Public Participation in Earthquake Structural Response Emergency Monitoring Using a Virtual Experiment and AI. Buildings 2022, 12, 492. https://doi.org/10.3390/buildings12040492
Li H, Chen X, Chen H, Wang B, Li W, Liu S, Li P, Qi Z, He Z, Zhao X. Simulation of Smartphone-Based Public Participation in Earthquake Structural Response Emergency Monitoring Using a Virtual Experiment and AI. Buildings. 2022; 12(4):492. https://doi.org/10.3390/buildings12040492
Chicago/Turabian StyleLi, Huan, Xixian Chen, Hongliang Chen, Bowen Wang, Weijie Li, Shenglan Liu, Peng Li, Zuoqiu Qi, Zheng He, and Xuefeng Zhao. 2022. "Simulation of Smartphone-Based Public Participation in Earthquake Structural Response Emergency Monitoring Using a Virtual Experiment and AI" Buildings 12, no. 4: 492. https://doi.org/10.3390/buildings12040492
APA StyleLi, H., Chen, X., Chen, H., Wang, B., Li, W., Liu, S., Li, P., Qi, Z., He, Z., & Zhao, X. (2022). Simulation of Smartphone-Based Public Participation in Earthquake Structural Response Emergency Monitoring Using a Virtual Experiment and AI. Buildings, 12(4), 492. https://doi.org/10.3390/buildings12040492