1.1. Preliminaries and Problem Statement
The identification of the dynamic properties of a system, i.e., its natural frequencies, damping ratios, and modal shapes, is nowadays common in many branches of engineering and has been used for different purposes both in mechanical and in civil and aerospace engineering applications [
1]. It can be performed by using traditional Experimental Modal Analysis (EMA) methods or Operational Modal Analysis (OMA) methods. EMA methods require the knowledge of both structural excitation (input) and structural response (output), while OMA methods allow one to identify the dynamic properties of a system, assumed as linear and time-invariant [
2], without knowledge of the structural excitation [
3] that is due to ambient vibrations and usually modelled as a stationary [
4] white noise [
5]. OMA methods can be employed for different purposes such as model validation [
6], calibration of Finite Elements Models (FEMs) [
7], vibration control [
8,
9], Structural Health Monitoring (SHM) [
10,
11,
12,
13,
14], damage detection [
15], and structural identification [
16,
17,
18]. Applications of OMA were conducted on bridges [
19,
20,
21], historical buildings [
17,
22], dams [
23], tall buildings [
24,
25], offshore platforms [
26,
27], and other kinds of structure [
28,
29,
30].
In structural engineering, the identification of the dynamic properties is the first step required to perform an SHM; indeed, if there are damages to the structural elements due to degradation of the materials or strong external excitations, then the dynamic behavior of the structure changes along with its dynamic properties, and therefore to identify structural damages, it is necessary to use identification methods capable of estimating the dynamic properties with high precision. However, the precision of OMA methods usually decreases when the damping ratio increases and/or there are closely spaced frequencies. Moreover, they do not return information regarding the structural input.
The aim of this paper is to propose a simple-to-use identification method that allows the modal parameters to be estimated, also in the case of high damping ratios, and that can provide information on the structural input.
1.2. State of the Art
In the literature, there are many OMA methods for structural identification that can be classified according to the domain in which they are developed.
Peak Picking (PP) [
31] is a simple frequency domain procedure to estimate the natural frequencies from the peaks of the Power Spectral Densities (PSDs) and, if linked to the Half Power Bandwidth Method (HP) [
31], allows the damping ratios to be identified. Although PP is attractive for its simplicity, it can be used only for systems that have low values of damping ratios and well-separated modes.
Frequency Domain Decomposition (FDD) was introduced in 2000 [
32,
33], and soon it became one of the most popular OMA methods in the frequency domain. Frequencies and modal shapes are estimated by performing a Singular Value Decomposition (SVD) [
5] of the PSD matrix. Although FDD is fast and simple to use, it cannot identify the damping ratios. For this reason, a new version of FDD, called Enhanced Frequency Domain Decomposition (EFDD), was developed [
34]. EFDD has higher accuracy than FDD, but the estimation of the damping ratios is still an open issue [
1].
The Natural Excitation Technique (NExT) [
35] is a time domain OMA method that exploits the auto- and cross-correlation functions of the response process. It has a deterministic framework [
1], but its combination with algorithms such as Eigensystem Realization Algorithm (ERA) [
36], PolyReference Complex Exponential (PRCE) [
37], or Extended Ibrahim Time Domain (EITD) [
38] can be classified as an OMA method to identify the dynamic properties, also in the case of closely spaced modes [
1].
Auto Regressive Moving Average (ARMA) [
39], or Auto Regressive Moving Average Vector (ARMAV) in case of multiple excitations [
40], is based on the prediction of the current value of a time series considering the past values and the prediction error. It is usually linked to another method, such as the Prediction Error Method (PEM) [
41], the Liner Multi-Stage (LMS) method [
42], or the Instrument Variable Method (IVM) [
42]. Since the MA part causes non-linearity, the identification process must be iteratively implemented, and thus it is computationally intensive.
Time Domain Decomposition (TDD) [
43] is based on a Single Degree of Freedom (SDoF) approach; in fact, for Multi Degree of Freedom (MDoF) systems, it is necessary to filter the signal to obtain mono-component signals [
43]. From the correlation functions matrix of the filtered signals, it is possible to estimate the modal shapes by performing an SVD [
43]. Frequencies and damping ratios can be estimated from the mono-component signals by using PP and HP. Since it is based on an SDOF approach, it is difficult to identify the dynamic properties in the case of closely spaced modes [
1].
The most used time domain OMA method is Stochastic Subspace Identification (SSI) [
1], first developed in 1991 [
44]. There are two main SSI algorithms [
45]: SSI covariance driven (SSI-COV), and SSI data driven (SSI-DATA). Both of them can be implemented with the Principle Component (PC) method, the Unweighted Principle Component (UPC) method, or the Canonical Variant Analysis (CVA) method. SSI-COV [
46] exploits the output covariance matrix, called the Toeplitz matrix, that is decomposed in two different ways, namely, into the product of an observability matrix and a controllability matrix and by using an SVD. With this information, it is possible to estimate the state transition matrix and, by performing an eigenvalue decomposition, it is possible to estimate the modal properties of the system. SSI-DATA [
47], developed in 1993, uses a QR decomposition of the data Hankel matrix in order to project the future output in the past output, and then an SVD of the projection matrix is performed to identify the dynamic properties. PC, UPC, or CVA are used to weigh the matrices before applying the SVD [
1,
3,
5]. SSI is a stable and precise method, but, in general, it is very difficult to mathematically implement [
1].
The Analytical Signal Method (ASM) is a recently introduced hybrid method [
17] that uses the mono-component correlation functions obtained from the Inverse Fourier Transform (IFT) of the filtered PSDs. Since the Analytical Signal (AS) is very sensible to the minimum change of the natural frequencies [
48,
49,
50], it is used in ASM to better identify them. Precisely, the AS of the mono-component correlation functions is decomposed in envelope and phase, from which it is possible to estimate the damping ratios and the natural frequencies. ASM is a fast OMA method, but it cannot identify the modal shapes.
The Time Domain–Analytical Signal Method (TD–ASM) is a recent OMA method very similar to ASM but entirely developed in the time domain [
18]. In TD–ASM, firstly the correlation functions matrix of the structural response is decomposed into mono-component correlation functions by using an SVD, and then the natural frequencies and the damping ratios can be estimated from the AS of the mono-component correlation functions [
18]. For systems that have equal masses, the modal shapes can be estimated by performing an SVD of the correlation functions matrix, but if the structural system has different masses, TD–ASM cannot identify the modal shapes except the dominant one. However, also in the cases of different masses, the frequencies and the damping ratios can be identified with sufficient accuracy, and the discrepancy between the estimated dominant modal shape and the exact one is very low and less than that reported by other OMA methods [
18].
OMA identification methods can also be linked with Artificial Intelligence (AI) or with Evolutionary Algorithms (EAs).
Procedures that link OMA with AI can be used to detect and/or localize damages [
51,
52,
53,
54]. They usually follow a Machine Learning (ML) approach [
51] that consists of training an Artificial Neural Network (ANN) through the use of different samples composed by an input (that can be the structural response or its statistical properties) and an output (that is the presence or not of the damage and/or its localization). The training can be supervised or unsupervised [
55], but for damage detection, the supervised training is generally used [
51]. However, for novel real structures, it is impossible to have real data on the damaged case, and thus in order to overcome this limit, two different procedures can be followed [
51]. The first one is to use the data obtained from FEM (appropriately calibrated) and the data obtained from in situ investigations for the undamaged structure, while for the damaged structure, only the data obtained from an FEM can be used. The second way is to use unsupervised ML or unsupervised Deep Learning (DL) approaches, but very few studies have been conducted in this regard [
51]. However, this kind of approach does not allow one to have full control of each single step performed by the AI, and the simulation of several input–output samples deriving from FEM can require a very high computational burden.
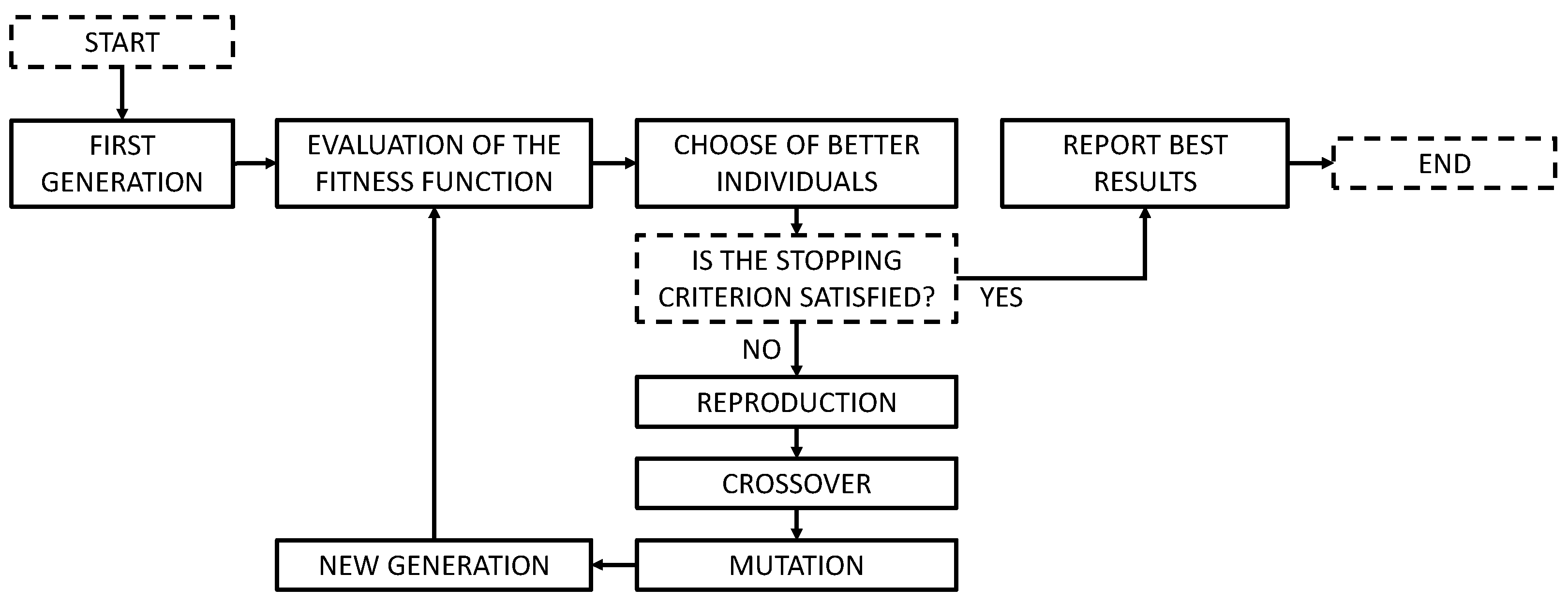
Procedures that use EA, such as the Genetic Algorithm (GA) or Particle Swarm Optimization (PSO), usually minimize or maximize the fitness value obtained from an objective function called fitness function [
56,
57]. The latter is properly designed depending on the purpose to be achieved. Nowadays, these kinds of techniques are used, for instance, to detect damages [
58] or to calibrate FEM [
59].









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}