
Structural Damage Identification Based on Convolutional Neural Networks and Improved Hunter–Prey Optimization Algorithm
 ,
, 
Abstract
:1. Introduction
2. Structural Damage Identification Based on CNN and IHPO Algorithm
2.1. Structural Damage Localization (SDL)
2.1.1. Cross-Correlation-Based Damage Localization Index (CCBLI)
2.1.2. Convolutional Neural Networks (CNN)
- (1)
- Convolutional Layer
- (2)
- Pooling Layer
- (3)
- Fully connected Layer
2.1.3. The Proposed CNN for SDL
2.2. Structural Damage Quantification (SDQ)
2.2.1. The Original Hunter–Prey Optimization Algorithm
2.2.2. The Improved Hunter–prey Optimization (IHPO) Algorithm
- (1)
- Tent Chaos Mapping and Cauchy Distribution
- (2)
- Linear Combination
- (3)
- The flowchart of IHPO algorithm
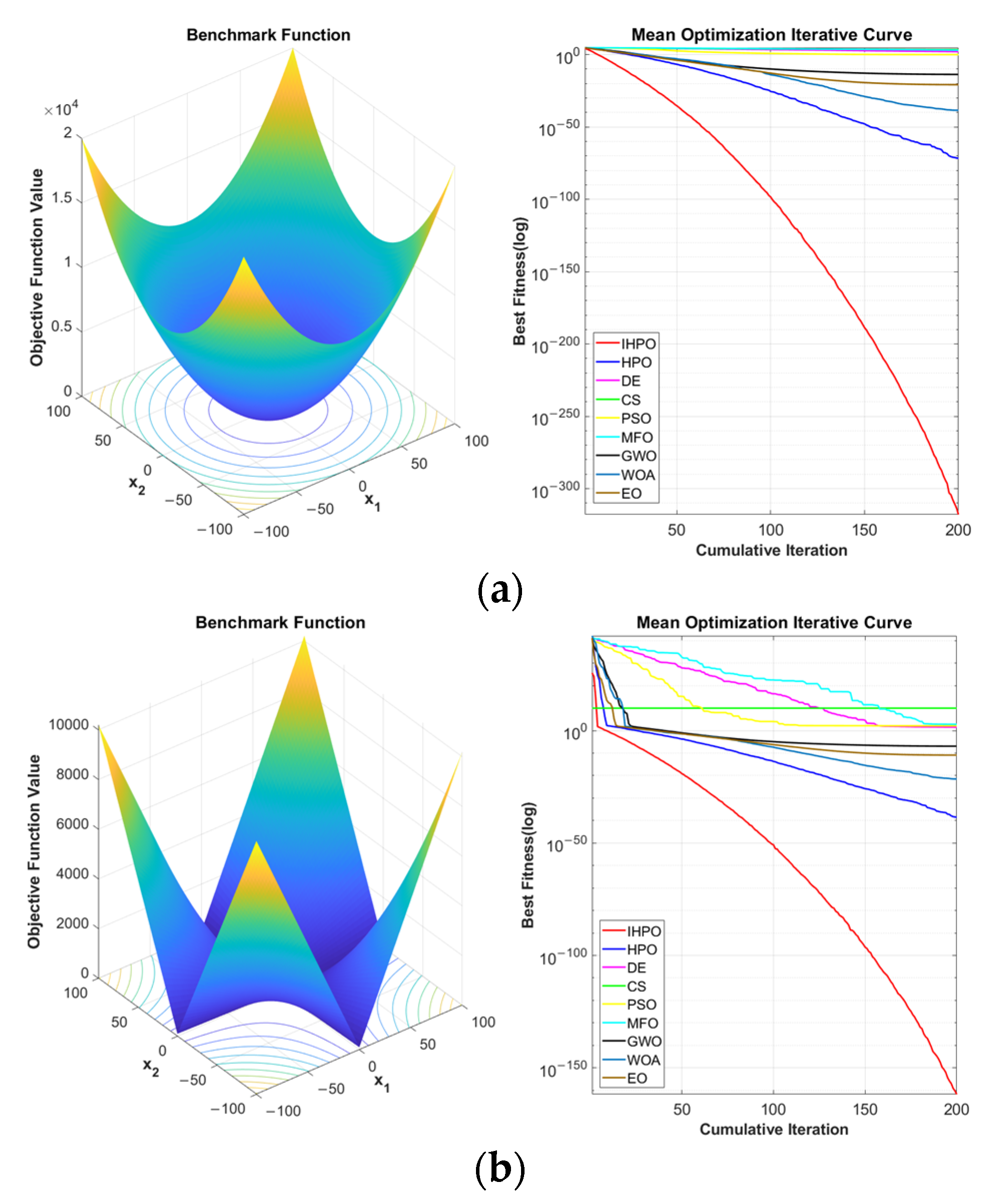
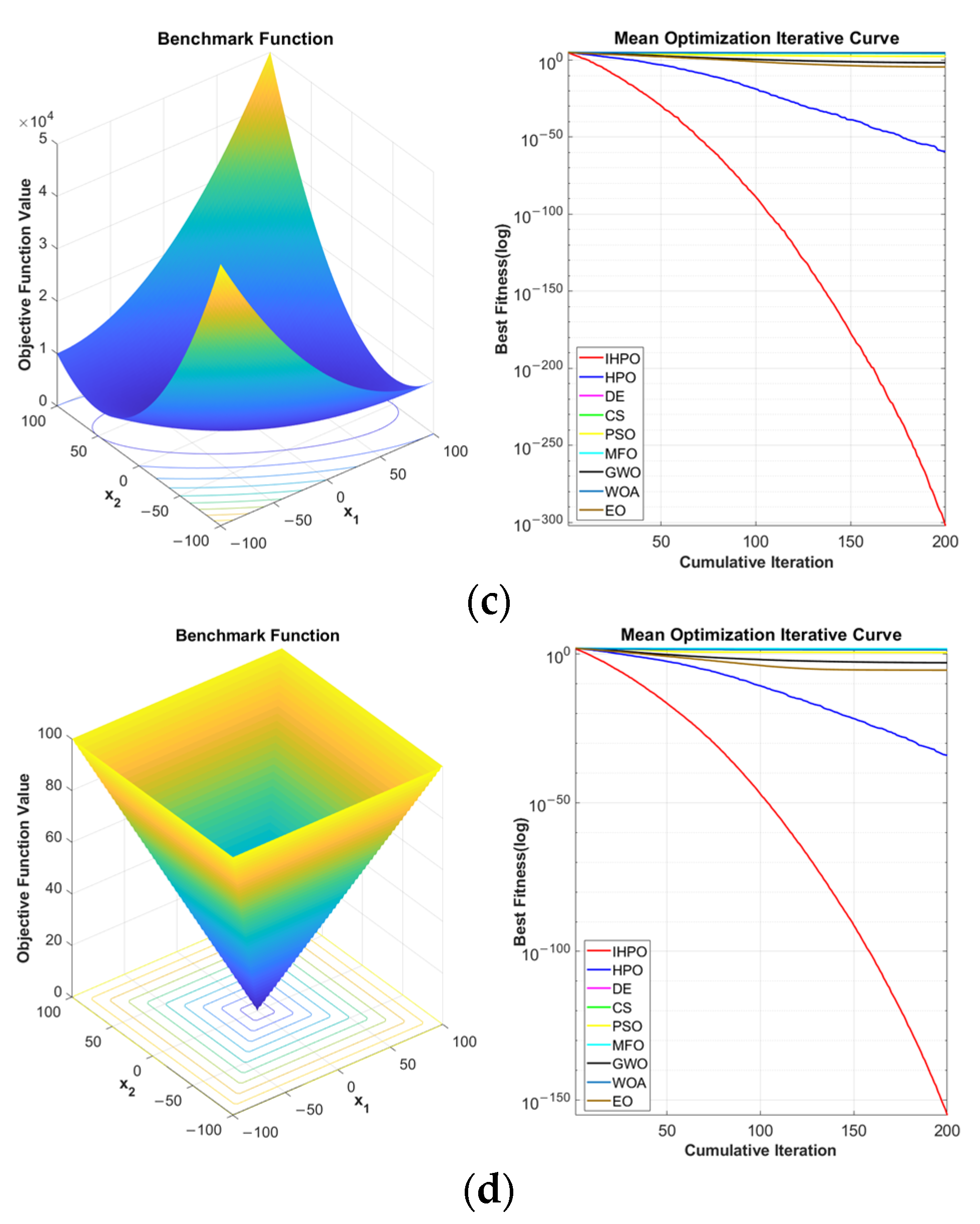
2.2.3. Optimization Performance Evaluation of IHPO Algorithm
2.2.4. The Objective Function of SDQ
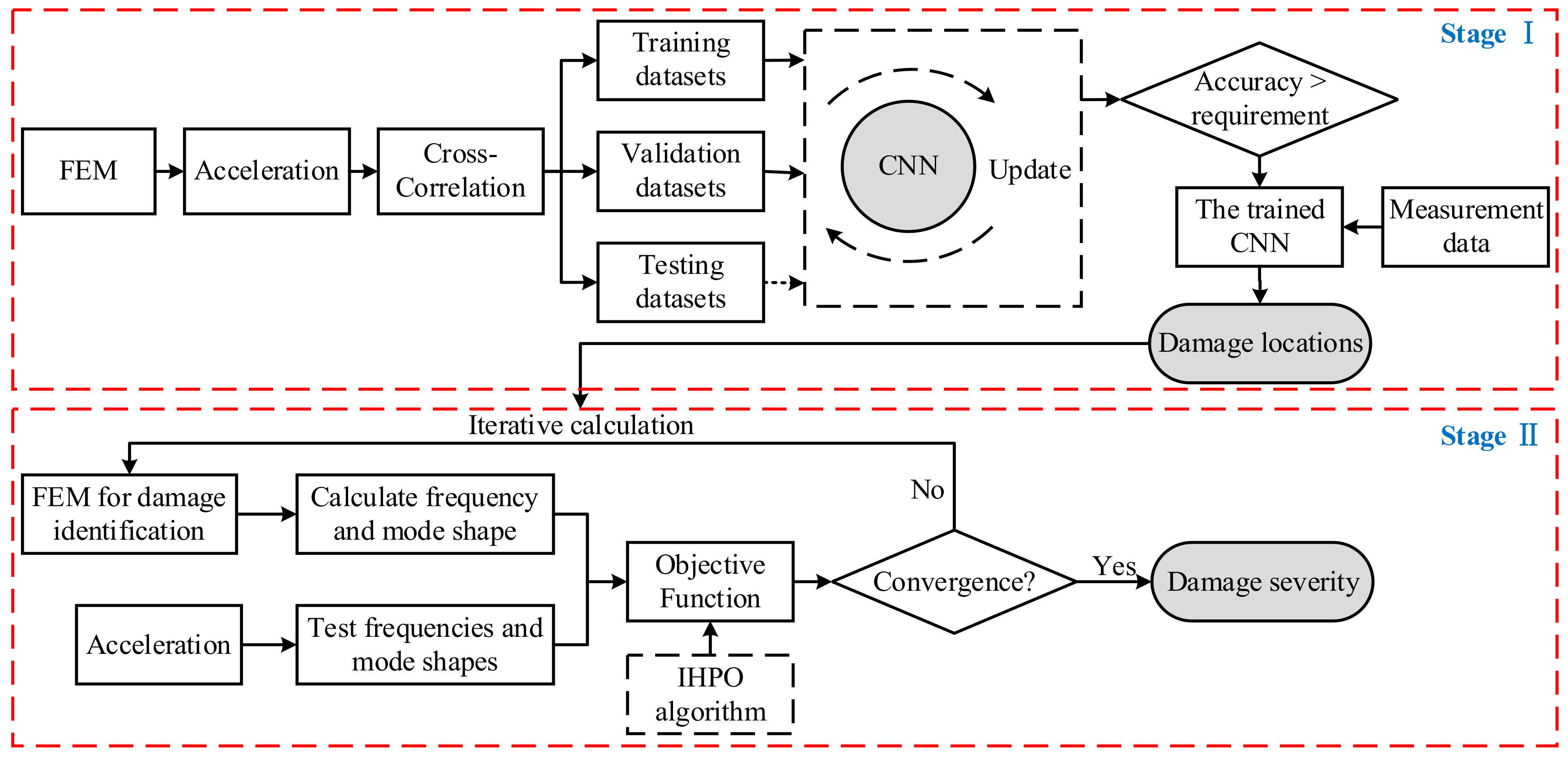
2.3. Damage Identification Based on CNN and IHPO Algorithm
- (1)
- The CCBLI is calculated according to the acceleration responses;
- (2)
- The CNN is adopted to construct the mapping relationship between the CCBLI and the corresponding damage location;
- (3)
- The measured data of a practical engineering structure is fed to the trained CNN for locating structural damage approximately;
- (4)
- The IHPO algorithm is used to optimize the objective function, to accurately estimate the damage severity.
3. Numerical Example
3.1. Damage Localization
3.1.1. Data Generation for Training
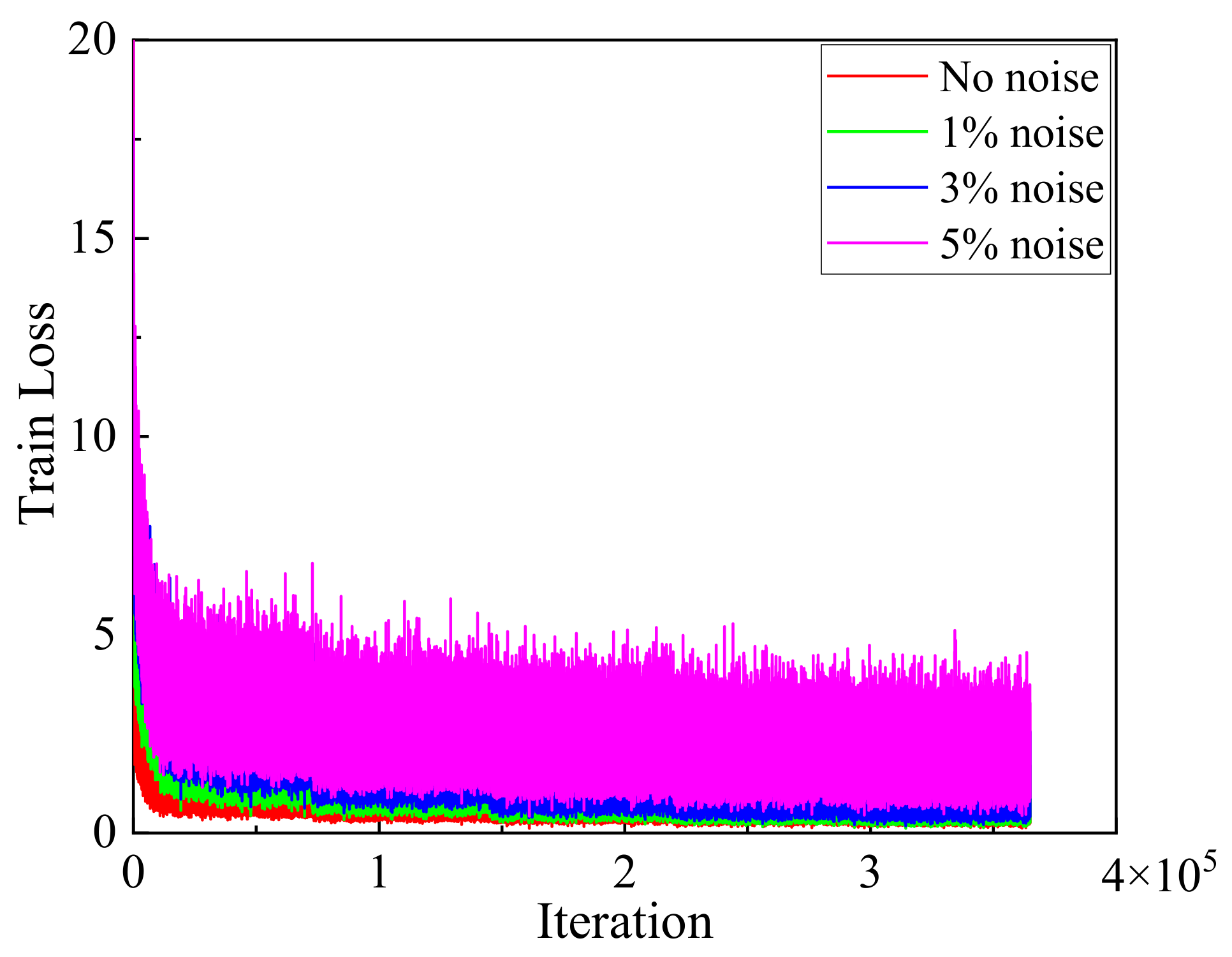
3.1.2. Performance Evaluation of the CNN Model
3.1.3. Damage Localization Results
3.2. Damage Quantification
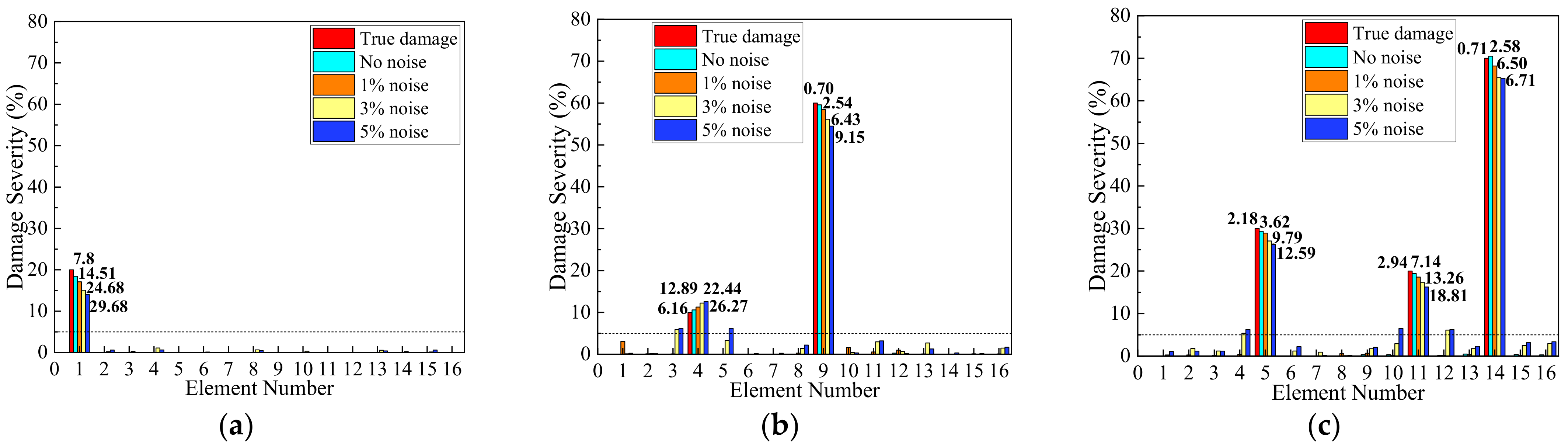
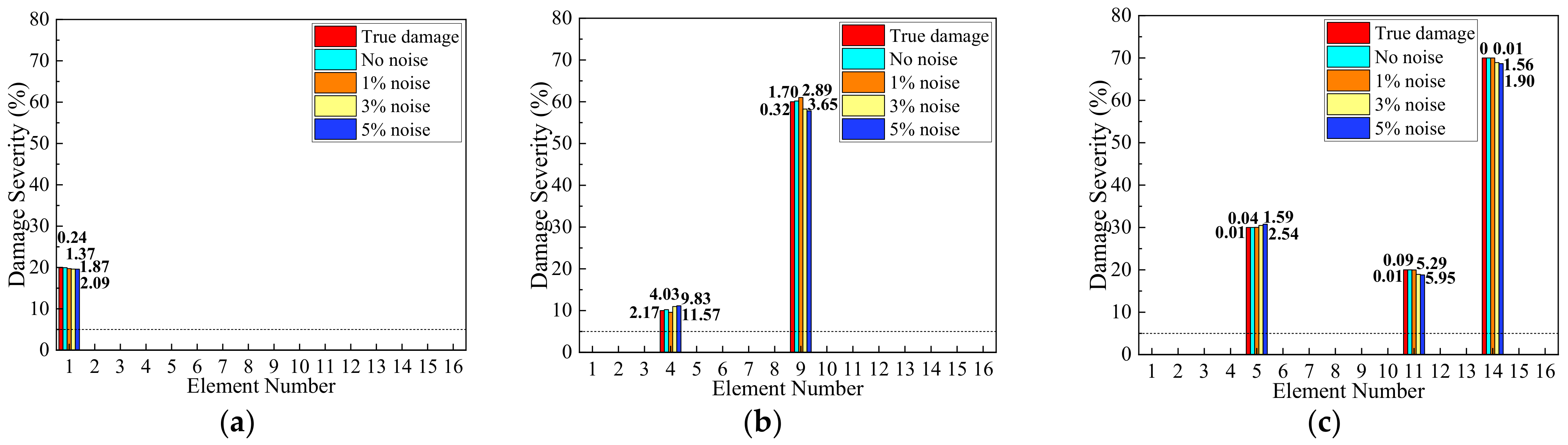
3.3. Comparative Study
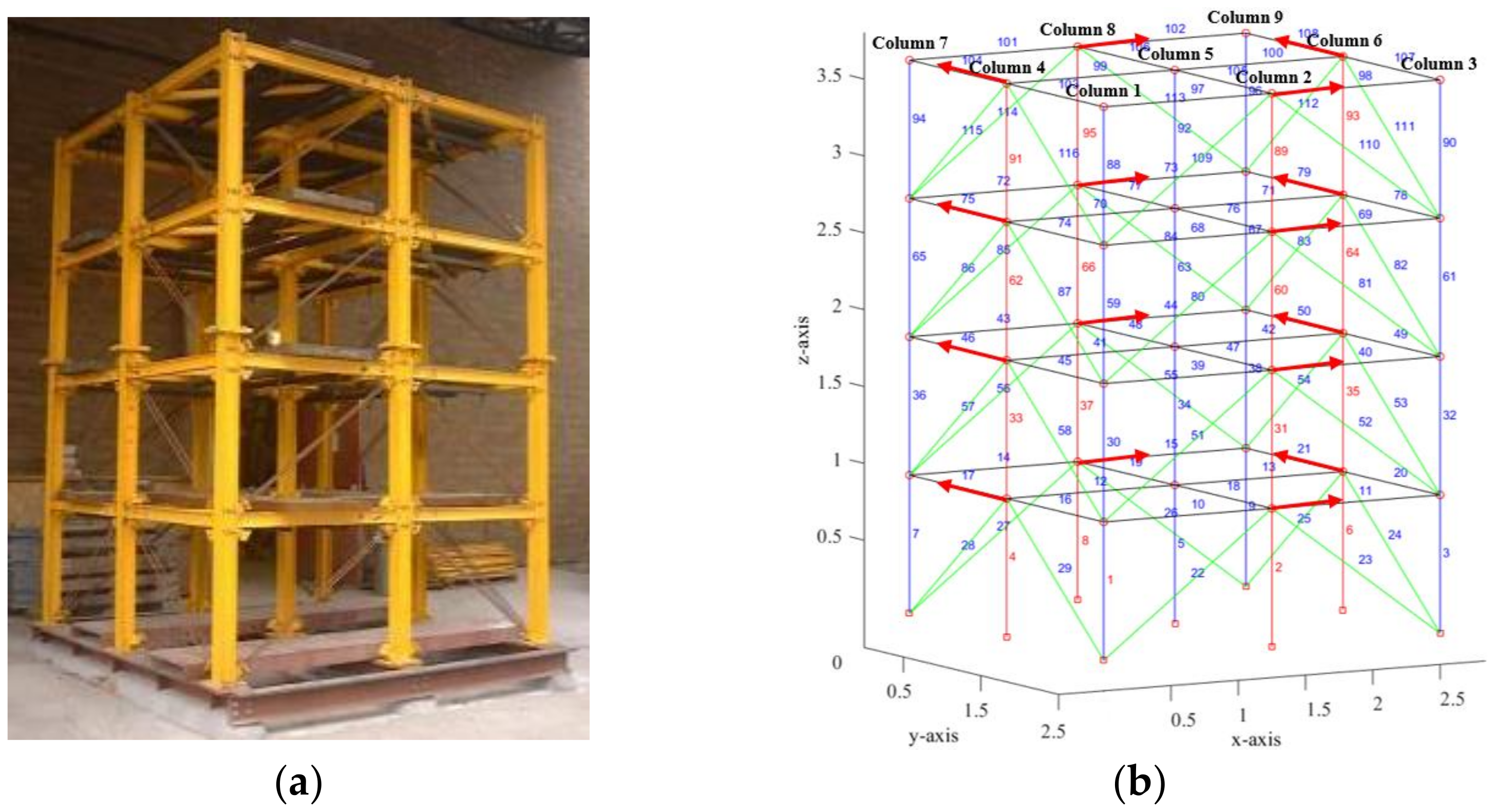
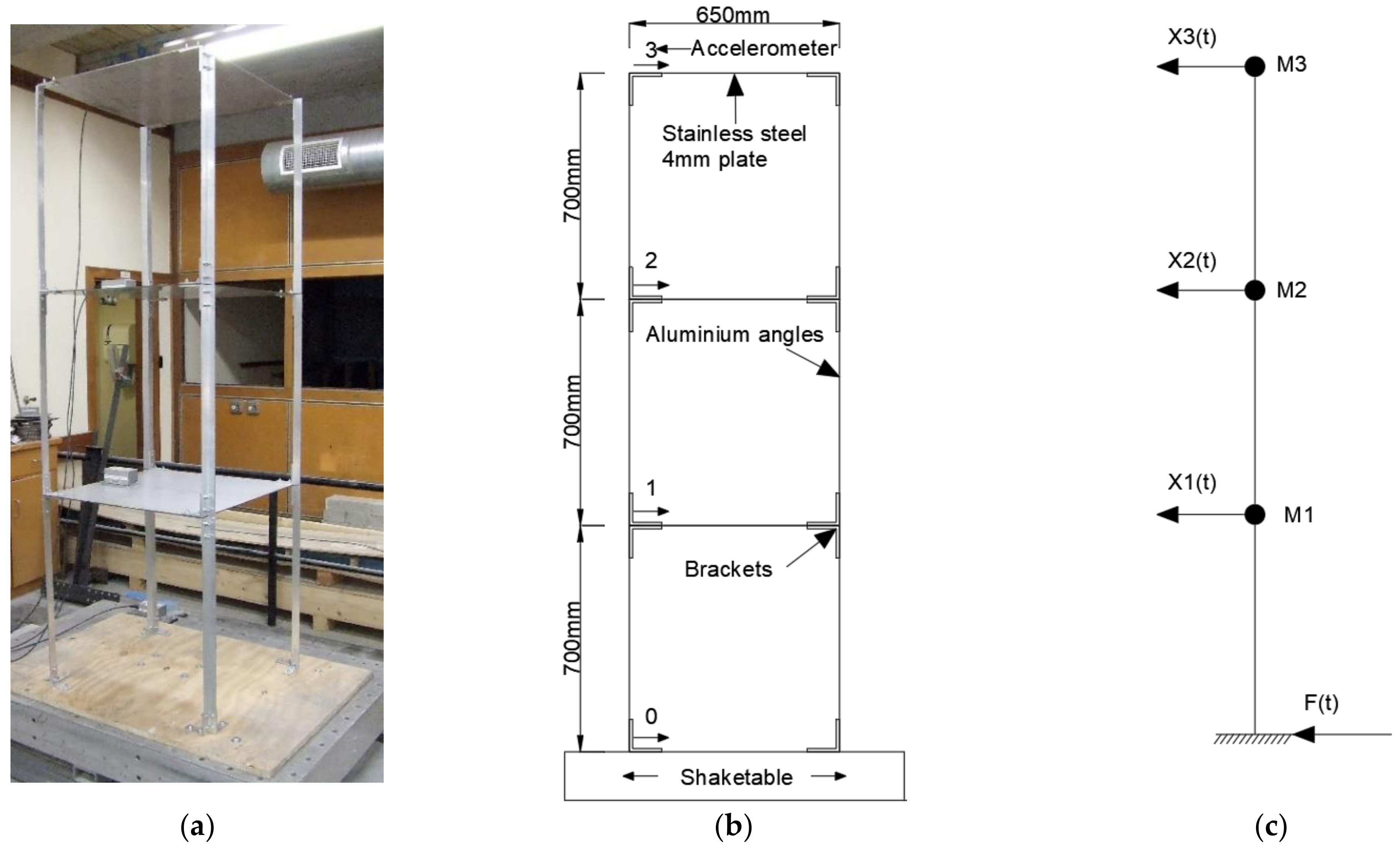
4. Experiment Validation
4.1. The Updated Finite Element Model
4.2. Damage Localization
4.2.1. Data Generation for Training
4.2.2. Damage Localization Results
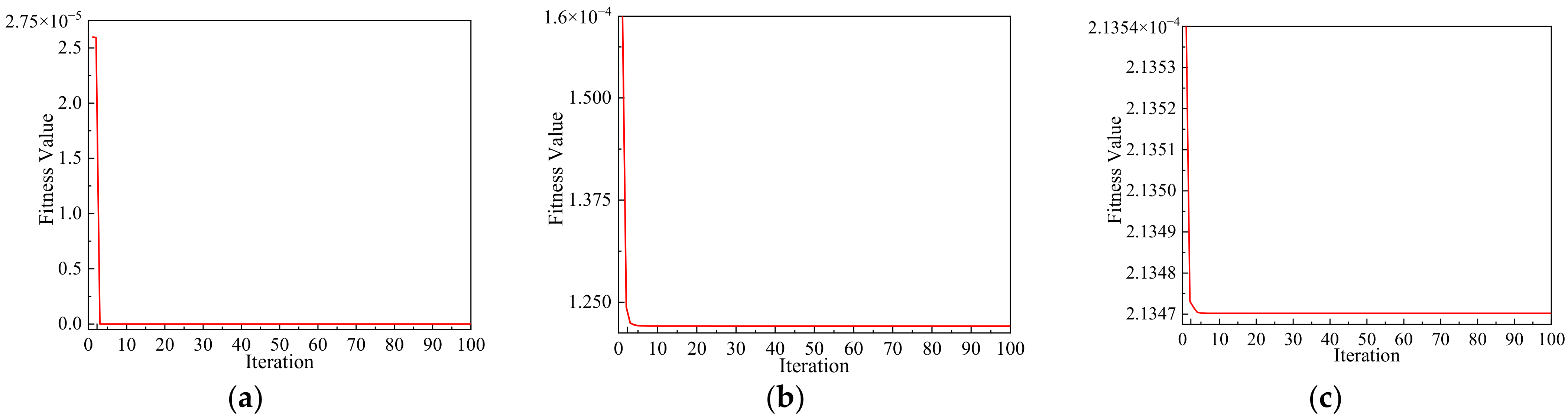
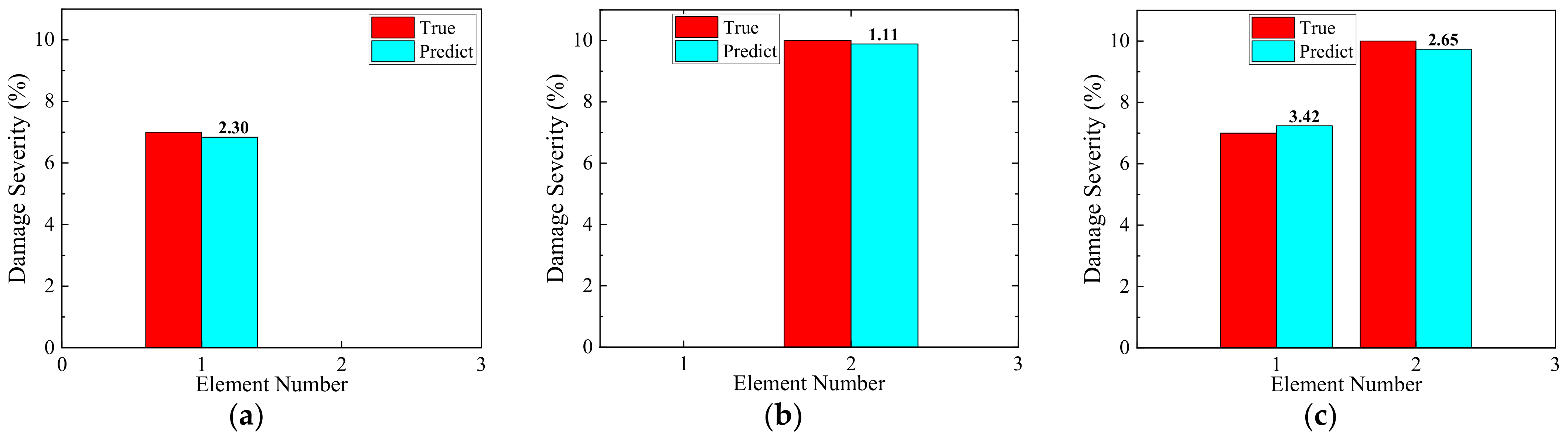
4.3. Damage Quantification
5. Conclusions
- (1)
- Compared with other common optimization algorithms, the IHPO algorithm has the advantages of a good global optimization capacity, a fast convergence speed, and a high convergence precision. It has great potential for structural damage quantification.
- (2)
- A numerical example of the ASCE benchmark frame structure considering measurement noise has been investigated, and the structural damage identification performance of the proposed method has been evaluated by making a comparison with the method using the CNN or the IHPO algorithm alone. The results show that in single-site and multiple-site damage identification, the proposed method outperforms the other two approaches on the accuracy and robustness. Moreover, the average consumption time is 20% less than the method using the IHPO algorithm alone. Therefore, this proposed two-stage damage identification approach can reduce the search dimension of the algorithm, improve the efficiency of damage identification, and save computation costs.
- (3)
- A test model of the three-storey frame structure is adopted to further investigate the feasibility of the proposed method. The results demonstrate that the proposed method has a good performance in detecting single-site and multiple-site damage and can be applied to the practical application of structural damage identification with sufficient accuracy.
- (4)
- Compared with the data-based and model-based methods, this study illustrates that the combination of a data-based method (CNN) and a model-based method (IHPO algorithm) can quickly identify damage accurately, which has great potential for practical structures. However, the numerical model and experimental example used in this paper are idealized without considering the influence of wind load, humidity variation, and environmental temperature fluctuation, et al. Therefore, these factors will be considered in future work to further test the effectiveness of the proposed method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gatti, M. Structural health monitoring of an operational bridge: A case study. Eng. Struct. 2019, 195, 200–209. [Google Scholar] [CrossRef]
- Vazquez, B.; Esteban, G.; Gaxiola-Camacho Ramon, J.; Bennett, R.; Guzman-Acevedo, M.; Gaxiola-Camacho, I.E. Structural evaluation of dynamic and semi-static displacements of the Juarez Bridge using GPS technology. Measurement 2017, 110, 146–153. [Google Scholar] [CrossRef]
- Huang, Y.; Shao, C.; Wu, B.; Beck, J.L.; Li, H. State-of-the-art review on Bayesian inference in structural system identification and damage assessment. Adv. Struct. Eng. 2019, 22, 1329–1351. [Google Scholar] [CrossRef]
- Hou, R.; Xia, Y. Review on the new development of vibration-based damage identification for civil engineering structures: 2010-2019. J. Sound. Vib. 2021, 491, 115741. [Google Scholar] [CrossRef]
- Huang, M.; Lei, Y.; Li, X.; Gu, J. Damage Identification of Bridge Structures Considering Temperature Variations-Based SVM and MFO. J. Aerospace Eng. 2021, 34, 04020113. [Google Scholar] [CrossRef]
- Vagnoli, M.; Remenyte-Prescott, R.; Andrews, J. Railway bridge structural health monitoring and fault detection: State-of-the-art methods and future challenges. Struct. Health Monit. 2018, 17, 971–1007. [Google Scholar] [CrossRef]
- Flah, M.; Nunez, I.; Ben Chaabene, W.; Nehdi, M. Machine learning algorithms in civil structural health monitoring: A systematic review. Arch. Comput. Method Eng. 2021, 28, 2621–2643. [Google Scholar] [CrossRef]
- Rafiei, M.H.; Adeli, H. A novel unsupervised deep learning model for global and local health condition assessment of structures. Eng. Struct. 2018, 156, 598–607. [Google Scholar] [CrossRef]
- Yang, Y.; Nagarajaiah, S. Blind identification of damage in time-varying systems using independent component analysis with wavelet transform. Mech. Syst. Signal Process. 2014, 47, 3–20. [Google Scholar] [CrossRef]
- Gul, M.; Catbas, F. Structural health monitoring and damage assessment using a novel time series analysis methodology with sensor clustering. J. Sound Vib. 2011, 330, 1196–1210. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, L. A novel pso-based algorithm for structural damage detection using bayesian multi-sample objective function. Struct. Eng. Mech. 2017, 63, 825–835. [Google Scholar] [CrossRef]
- Rogers, T.; Worden, K.; Fuentes, R.; Dervilis, N.; Tygesen, U.; Cross, E. A bayesian non-parametric clustering approach for semi-supervised structural health monitoring. Mech. Syst. Signal Process. 2018, 119, 100–119. [Google Scholar] [CrossRef]
- Zheng, J.; Teng, X.; Liu, J.; Qiao, X. Convolutional Neural Networks for Water Content Classification and Prediction With Ground Penetrating Radar. IEEE Access 2019, 7, 185385–185392. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.-z.; Nie, Z.-h.; Ma, H.-w. Structural Damage Detection with Automatic Feature-Extraction through Deep Learning: Structural damage detection with automatic feature-extraction through deep learning. Comput. Aided Civ. Inf. 2017, 32, 1025–1046. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound. Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, M.S.; Boashash, B.; Sodano, H.; Inman, D.J. 1-D CNNs for structural damage detection: Verification on a structural health monitoring benchmark data. Neurocomputing 2018, 275, 1308–1317. [Google Scholar] [CrossRef]
- Azimi, M.; Pekcan, G. Structural health monitoring using extremely compressed data through deep learning. Comput. Aided Civ. Inf. 2020, 35, 597–614. [Google Scholar] [CrossRef]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R.X. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Dinh-Cong, D.; Vo-Duy, T.; Ho-Huu, V.; Dang-Trung, H.; Nguyen-Thoi, T. An efficient multi-stage optimization approach for damage detection in plate structures. Adv. Eng. Softw. 2017, 112, 76–87. [Google Scholar] [CrossRef]
- Huang, M.; Lei, Y.; Cheng, S. Damage identification of bridge structure considering temperature variations based on particle swarm optimization-cuckoo search algorithm. Adv. Struct. Eng. 2019, 22, 3262–3276. [Google Scholar] [CrossRef]
- Du, D.; Vinh, H.; Trung, V.; Hong Quyen, N.; Trung, N. Efficiency of Jaya algorithm for solving the optimization-based structural damage identification problem based on a hybrid objective function. Eng. Optimiz. 2018, 50, 1233–1251. [Google Scholar] [CrossRef]
- Tran-Ngoc, H.; Khatir, S.; Roeck, G.D.; Bui-Tien, T.; Abdel Wahab, M. Damage assessment in beam-like structures using cuckoo search algorithm and experimentally measured data. In Proceedings of the 13th International Conference on Damage Assessment of Structures, Porto, Portugal, 9–10 July 2019; Springer: Singapore, 2020. [Google Scholar] [CrossRef]
- Gomes, G.F.; Da Cunha, S.S.; Ancelotti, A.C. A sunflower optimization (SFO) algorithm applied to damage identification on laminated composite plates. Eng. Comput. Ger. 2019, 35, 619–626. [Google Scholar] [CrossRef]
- Wei, Z.; Liu, J.; Lu, Z. Structural damage detection using improved particle swarm optimization. Inverse. Probl. Sci. Eng. 2018, 26, 792–810. [Google Scholar] [CrossRef]
- Huang, M.; Li, X.; Lei, Y.; Gu, J. Structural damage identification based on modal frequency strain energy assurance criterion and flexibility using enhanced Moth-Flame optimization. Structures 2020, 28, 1119–1136. [Google Scholar] [CrossRef]
- Ding, Z.; Fu, K.; Deng, W.; Li, J.; Zhongrong, L. A modified Artificial Bee Colony algorithm for structural damage identification under varying temperature based on a novel objective function. Appl. Math. Model. 2020, 88, 122–141. [Google Scholar] [CrossRef]
- Dang, X. Statistic Strategy of Damage Detection for Composite Structure Using the Correlation Function Amplitude Vector. Procedia. Eng. 2015, 99, 1395–1406. [Google Scholar] [CrossRef]
- Diwakar, C.M.; Patil, N.; Sunny, M.R. Structural Damage Detection Using Vibration Response Through Cross-Correlation Analysis: Experimental Study. AIAA J. 2018, 56, 2455–2465. [Google Scholar] [CrossRef]
- Naruei, I.; Keynia, F.; Sabbagh Molahosseini, A. Hunter-prey optimization: Algorithm and applications. Soft. Comput. 2022, 26, 1279–1314. [Google Scholar] [CrossRef]
- Demidova, L.A.; Gorchakov, A.V. A Study of Chaotic Maps Producing Symmetric Distributions in the Fish School Search Optimization Algorithm with Exponential Step Decay. Symmetry 2020, 12, 784. [Google Scholar] [CrossRef]
- Reed, H.M.; Nichols, J.M.; Earls, C.J. A modified differential evolution algorithm for damage identification in submerged shell structures. Mech. Syst. Signal Process. 2013, 39, 396–408. [Google Scholar] [CrossRef]
- Zare Hosseinzadeh, A.; Ghodrati Amiri, G.; Jafarian Abyaneh, M.; Seyed Razzaghi, S.A.; Ghadimi Hamzehkolaei, A. Baseline updating method for structural damage identification using modal residual force and grey wolf optimization. Eng. Optimiz. 2020, 52, 549–566. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The Whale Optimization Algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Aval, S.B.B.; Mohebian, P. Joint Damage Identification in Frame Structures by Integrating a New Damage Index with Equilibrium Optimizer Algorithm. Int. J. Struct. Stab. Dyn. 2022, 22, 2250056. [Google Scholar] [CrossRef]
- Ye, J. Cosine similarity measures for intuitionistic fuzzy sets and their applications. Math. Comp. Model. Dyn. 2011, 53, 91–97. [Google Scholar] [CrossRef]
- Huang, M.-S.; Gül, M.; Zhu, H.-P. Vibration-Based Structural Damage Identification under Varying Temperature Effects. J. Aerospace Eng. 2018, 31, 04018014. Available online: https://xueshu.baidu.com/usercenter/paper/show?paperid=1f987dd604c5f94ac689965a2ebb3f47&site=xueshu_se (accessed on 17 July 2022). [CrossRef]
- Johnson, E.A.; Lam, H.F.; Katafygiotis, L.S.; Beck, J.L. Phase I IASC-ASCE Structural Health Monitoring Benchmark Problem Using Simulated Data. J. Eng. Mech. 2004, 130, 3–15. [Google Scholar] [CrossRef]
- Bernal, D.; Dyke, S.J.; Lam, H.F.; Beck, J.L. Phase II of the ASCE benchmark study on SHM. In Proceedings of the 15th ASCE Engineering Mechanics Conference, Columbia University, New York, NY, USA, 2–5 June 2002; Available online: http://authors.library.caltech.edu/34238/1/Report_bldg_shm_ana2.pdf (accessed on 17 July 2022).
- Lam, H.F. PHASE Ile of the Iasc-Asce Benchmark Study on Structural Health Monitoring. In Proceedings of the A Conference & Exposition on Structural Dynamics, Kissimmee, FL, USA, 3–6 February 2003; Available online: https://repository.hkust.edu.hk/ir/Record/1783.1-28551 (accessed on 17 July 2022).
- Omenzetter, P.; De Lautour, O.R. Detection of Seismic Damage in Buildings Using Structural Responses; Report number: UNI/535; Earthquake Commission Research Foundation: The Pines Beach, New Zealand, 2008. [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function Formula | Algorithm | Best | Worst | Mean | Std |
|---|---|---|---|---|---|
| IHPO | 0 | 1.31 × 10−317 | 1.32 × 10−318 | 0 | |
| HPO | 2.76 × 10−78 | 2.20 × 10−71 | 2.40 × 10−72 | 6.92 × 10−72 | |
| DE | 7.03 × 10 | 1.65 × 102 | 1.22 × 102 | 2.54 × 10 | |
| CS | 1.32 × 103 | 3.26 × 103 | 2.23 × 103 | 5.32 × 102 | |
| PSO | 3.96 × 10−1 | 1.85 | 9.76 × 10−1 | 5.41 × 10−1 | |
| MFO | 4.34 × 102 | 1.82 × 103 | 1.00 × 103 | 4.75 × 102 | |
| GWO | 8.71 × 10−16 | 4.07 × 10−14 | 2.07 × 10−14 | 1.32 × 10−14 | |
| WOA | 1.62 × 10−43 | 2.86 × 10−38 | 3.23 × 10−39 | 8.96 × 10−39 | |
| EO | −1.28 × 10−11 | 1.02 × 10−11 | 4.97 × 10−13 | 6.31 × 10−12 | |
| IHPO | 4.02 × 10−166 | 1.54 × 10−161 | 1.68 × 10−162 | 4.97 × 10−162 | |
| HPO | 4.45 × 10−41 | 1.98 × 10−38 | 2.93 × 10−39 | 6.01 × 10−39 | |
| DE | 2.98 × 10 | 4.29 × 10 | 3.57 × 10 | 3.52 | |
| CS | 1.00 × 1010 | 1.00 × 1010 | 1.00 × 1010 | 0 | |
| PSO | 2.16 × 10 | 2.46 × 102 | 1.30 × 102 | 7.26 × 10 | |
| MFO | 4.83 × 102 | 9.47 × 102 | 6.62 × 102 | 1.28 × 102 | |
| GWO | 6.08 × 10−8 | 2.05 × 10−7 | 1.20 × 10−7 | 5.95 × 10−8 | |
| WOA | 5.73 × 10−24 | 2.10 × 10−21 | 3.07 × 10−22 | 6.39 × 10−22 | |
| EO | −7.39 × 10−13 | 1.04 × 10−12 | 7.67 × 10−14 | 5.90 × 10−13 | |
| IHPO | 1.0 × 10−310 | 5.33 × 10−302 | 5.44 × 10−303 | 0 | |
| HPO | 3.59 × 10−72 | 5.00 × 10−59 | 5.69 × 10−60 | 1.57 × 10−59 | |
| DE | 2.76 × 104 | 3.98 × 104 | 3.30 × 104 | 3.92 × 103 | |
| CS | 1.15 × 104 | 1.87 × 104 | 1.49 × 104 | 2.14 × 103 | |
| PSO | 6.73 × 10 | 7.48 × 102 | 2.45 × 102 | 2.20 × 102 | |
| MFO | 1.21 × 104 | 3.34 × 104 | 2.26 × 104 | 7.50 × 103 | |
| GWO | 5.33 × 10−4 | 6.02 × 10−2 | 2.00 × 10−2 | 2.00 × 10−2 | |
| WOA | 2.63 × 104 | 4.89 × 104 | 4.07 × 104 | 7.37 × 103 | |
| EO | −2.15 × 10−3 | 2.13 × 10−3 | 1.17 × 10−4 | 1.20 × 10−3 | |
| IHPO | 2.60 × 10−158 | 2.98 × 10−155 | 8.46 × 10−156 | 1.13 × 10−155 | |
| HPO | 1.02 × 10−36 | 4.90 × 10−34 | 8.45 × 10−35 | 1.53 × 10−34 | |
| DE | 4.81 × 10 | 5.81 × 10 | 5.33 × 10 | 3.46 | |
| CS | 3.57 × 10 | 4.23 × 10 | 3.94 × 10 | 2.04 | |
| PSO | 2.08 | 5.05 | 3.16 | 9.59 × 10−1 | |
| MFO | 4.49 × 10 | 6.76 × 10 | 5.53 × 10 | 7.24 | |
| GWO | 4.85 × 10−4 | 2.28 × 10−3 | 1.18 × 10−3 | 6.06 × 10−4 | |
| WOA | 1.59 × 10−2 | 7.88 × 10 | 2.49 × 10 | 2.47 × 10 | |
| EO | −8.36 × 10−6 | 1.41 × 10−6 | −3.11 × 10−6 | 2.75 × 10−6 |
| Noise Level (%) | Validation Loss | Test MSE | Test R |
|---|---|---|---|
| - | 0.877 | 0.044 | 0.943 |
| 1 | 0.906 | 0.055 | 0.941 |
| 3 | 1.061 | 0.078 | 0.891 |
| 5 | 1.285 | 0.091 | 0.830 |
| Noise Level (%) | Damage Case | Damage Element | Damage Severity (%) |
|---|---|---|---|
| -, 3, 5 and 10 | Case 1 | #1 | 20 |
| Case 2 | #4, #9 | 10, 60 | |
| Case 3 | #5, #11 and #14 | 30, 20 and 70 |
| Noise Level (%) | Damage Case | True Damage Severity#Element | Suspected Damage Element |
|---|---|---|---|
| - | Case 1 | 20%#1 | #1 |
| Case 2 | 10%#4 and 60%#9 | #4 and #9 | |
| Case 3 | 30%#5, 20%#11 and 70%#14 | #5, #11 and #14 | |
| 1 | Case 1 | 20%#1 | #1 |
| Case 2 | 10%#4 and 60%#9 | #4 and #9 | |
| Case 3 | 30%#5, 20%#11 and 70%#14 | #5, #11 and #14 | |
| 3 | Case 1 | 20%#1 | #1 |
| Case 2 | 10%#4 and 60%#9 | #3, #4 and #6 | |
| Case 3 | 30%#5, 20%#11 and 70%#14 | #4, #5, #11, #12 and #16 | |
| 5 | Case 1 | 20%#1 | #1 |
| Case 2 | 10%#4 and 60%#9 | #3, #4, #5 and #9 | |
| Case 3 | 30%#5, 20%#11 and 70%#14 | #4, #5, #62, #64, #66 and #91 |
| Noise Level (%) | Damage Case | Ture Damage | Method 1 | Method 3 | ||
|---|---|---|---|---|---|---|
| Identified Damage | Time | Identified Damage | Time | |||
| - | Case 1 | 20%#1 | 19.95%#1 | 91.73 | 15.16%#1 and 5.37%#2 | 118.84 |
| Case 2 | 10%#4 and 60%#9 | 10.22%#4 and 60.19%#9 | 93.36 | 10.57%#4, 13.62%#9, 19.17%#12, 20.85%#13, and 9.35%#15 | 118.95 | |
| Case 3 | 30%#5, 20%#11, and 70%#14 | 30%#5, 20%#11, and 70%#14 | 93.47 | 5.98%#5, 8.49%#8, 5.14%#9, 6.20%#10, 20%#11, 21.15%#14, and 18.20%#15 | 119.03 | |
| 1 | Case 1 | 20%#1 | 19.73%#1 | 94.83 | 13.96%#1 and 6.67%#2 | 119.63 |
| Case 2 | 10%#4 and 60%#9 | 9.60%#4 and 61.02%#9 | 96.08 | 6.38%#4, 9.13%#9, 13.42%#12, 21.0%#13, and 20.62%#16 | 119.66 | |
| Case 3 | 30%#5, 20%#11, and 70%#14 | 30.01%#5, 19.98%#11, and 70%#14 | 96.10 | 5.40%#4, 7.91%#5, 5.01%#9, 6.19%#10, 5.31%#11, 5.26%#13, 16.42%#14, and 19.57%#15 | 120.37 | |
| 3 | Case 1 | 20%#1 | 19.62%#1 | 96.13 | 18.72%#2 | 119.78 |
| Case 2 | 10%#4 and 60%#9 | 10.98%#4 and 58.27%#9 | 97.84 | 10.52%#4, 5.90%#9, 12.45%#12, 38.77%#13, and 9.89%#16 | 120.30 | |
| Case 3 | 30%#5, 20%#11, and 70%#14 | 30.48%#5, 18.94%#11, and 68.91%#14 | 97.75 | 8.53%#4, 20.75%#9, 18.05%#12, 12.32%#13, and 11.68%#16 | 120.36 | |
| 5 | Case 1 | 20%#1 | 19.58%#1 | 96.92 | 18.41%#2 | 120.27 |
| Case 2 | 10%#4 and 60%#9 | 11.16%#4 and 57.81%#9 | 97.63 | 8.06%#4, 15.31%#9, 19.17%#12, 6.60%#13, and 15.21%#16 | 120.47 | |
| Case 3 | 30%#5, 20%#11, and 70%#14 | 30.76%#5, 18.81%#11, and 68.67%#14 | 98.08 | 8.56%#8, 5.61%#9, 7.35%#10, 6.29%#11, 5.23%#12, 6.13%#13, 12.57%#14, 16.27%#15, and 5.82%#16 | 121.42 | |
| Label | State | Damage Information |
|---|---|---|
| State 0 | Undamaged | Baseline condition |
| State 1 | Damaged | 7% in 1st storey stiffness reduction |
| State 2 | Damaged | 10% in 2nd storey stiffness reduction |
| State 3 | Damaged | 7% and 10% in 1st and 2nd storey stiffness reduction, respectively |
| Order | Experimental Frequency (Hz) | Frequency before Update (Hz) | Error (%) | MAC | Updated Frequency (Hz) | Error (%) | MAC |
|---|---|---|---|---|---|---|---|
| 1 | 1.928 | 2.026 | 5.09 | 0.996 | 1.929 | 0.04 | 0.993 |
| 2 | 5.520 | 5.868 | 6.31 | 0.927 | 5.520 | 0.01 | 0.993 |
| 3 | 8.550 | 9.261 | 8.31 | 0.930 | 8.545 | 0.05 | 0.991 |
| Label | True Damage Severity#Element | Suspected Damage Element |
|---|---|---|
| State 1 | 7%#1 | #1 |
| State 2 | 10%#2 | #2 |
| State 3 | 7%#1 and 10%#2 | #1 and #2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, C.; Gu, J.; Luo, J.; Qu, H.; Sun, C.; Jia, W.; Wang, F. Structural Damage Identification Based on Convolutional Neural Networks and Improved Hunter–Prey Optimization Algorithm. Buildings 2022, 12, 1324. https://doi.org/10.3390/buildings12091324
Xiang C, Gu J, Luo J, Qu H, Sun C, Jia W, Wang F. Structural Damage Identification Based on Convolutional Neural Networks and Improved Hunter–Prey Optimization Algorithm. Buildings. 2022; 12(9):1324. https://doi.org/10.3390/buildings12091324
Chicago/Turabian StyleXiang, Chunyan, Jianfeng Gu, Jin Luo, Hao Qu, Chang Sun, Wenkun Jia, and Feng Wang. 2022. "Structural Damage Identification Based on Convolutional Neural Networks and Improved Hunter–Prey Optimization Algorithm" Buildings 12, no. 9: 1324. https://doi.org/10.3390/buildings12091324
APA StyleXiang, C., Gu, J., Luo, J., Qu, H., Sun, C., Jia, W., & Wang, F. (2022). Structural Damage Identification Based on Convolutional Neural Networks and Improved Hunter–Prey Optimization Algorithm. Buildings, 12(9), 1324. https://doi.org/10.3390/buildings12091324