
Sliding Mode Control for Semi-Active Damping of Vibrations Using on/off Viscous Structural Nodes

 , , , , and
, , , , and
Abstract
:1. Introduction
2. The on/off Node and the Structure
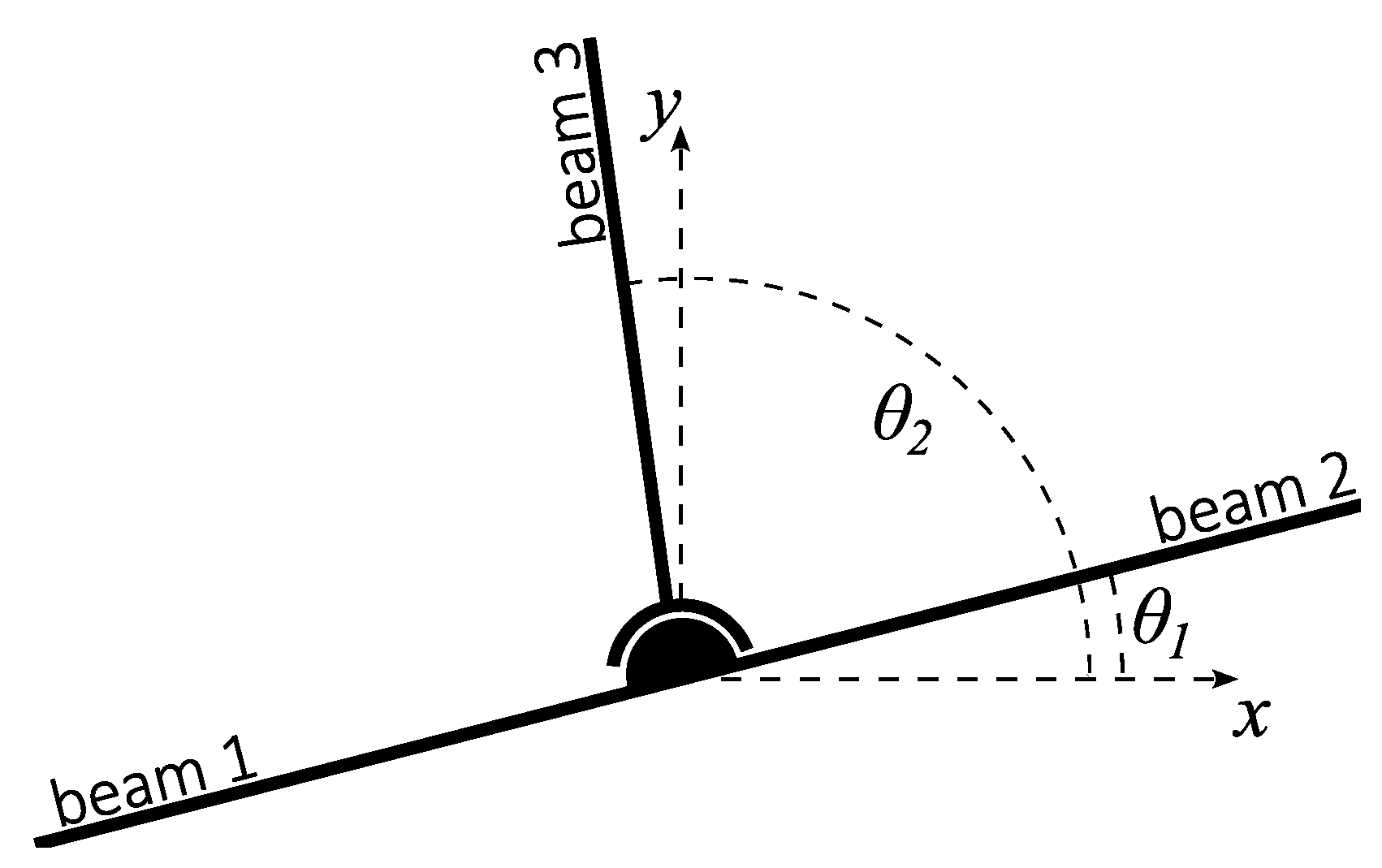
2.1. Model of the Controllable Node
- The beams aggregated to the same rotational DOF remain rigidly connected, as in a typical frame node, with a full transmission of the bending moments between them (beams 1 and 2 in the example shown in Figure 1);
- In the unlocked (“off”) state of the node, the two rotational DOFs and remain uncoupled and rotate independently. The bending moments are not transmitted between the aggregated groups of adjacent beams (beams 1/2 and beam 3, respectively, in Figure 1);
- The locked (“on”) state of the node imposes (an approximation of) the following kinematic constraint:which effectively couples the rotations of the two DOFs and allows the bending moments to be transmitted between all the adjacent beams.

2.2. Element Aggregation and the Viscous Coupling Matrix
- All the local horizontal and vertical displacement DOFs of the adjacent beams are aggregated to the corresponding nodal displacements x or y.
- The local rotational DOFs of the beams are aggregated either to or to , depending on the planned transmission of moments and operation of the node. For the example shown in Figure 1, the rotational DOFs of beams 1 and 2 are aggregated to , while the rotational DOF of beam 3 is aggregated to .
2.3. Equation of Motion
3. The Control Method
3.1. The Control Forces
3.2. The Control Aim
3.3. Sliding Mode Control
- Limiting the maximum switching frequency to avoid the chattering phenomenon;
- Introducing a phase-related correction.
3.4. Chattering Avoidance
3.5. Phase-Related Correction and the Final Control Law
4. Numerical Experiment
4.1. The Structure
4.2. Excitation and Simulation Parameters
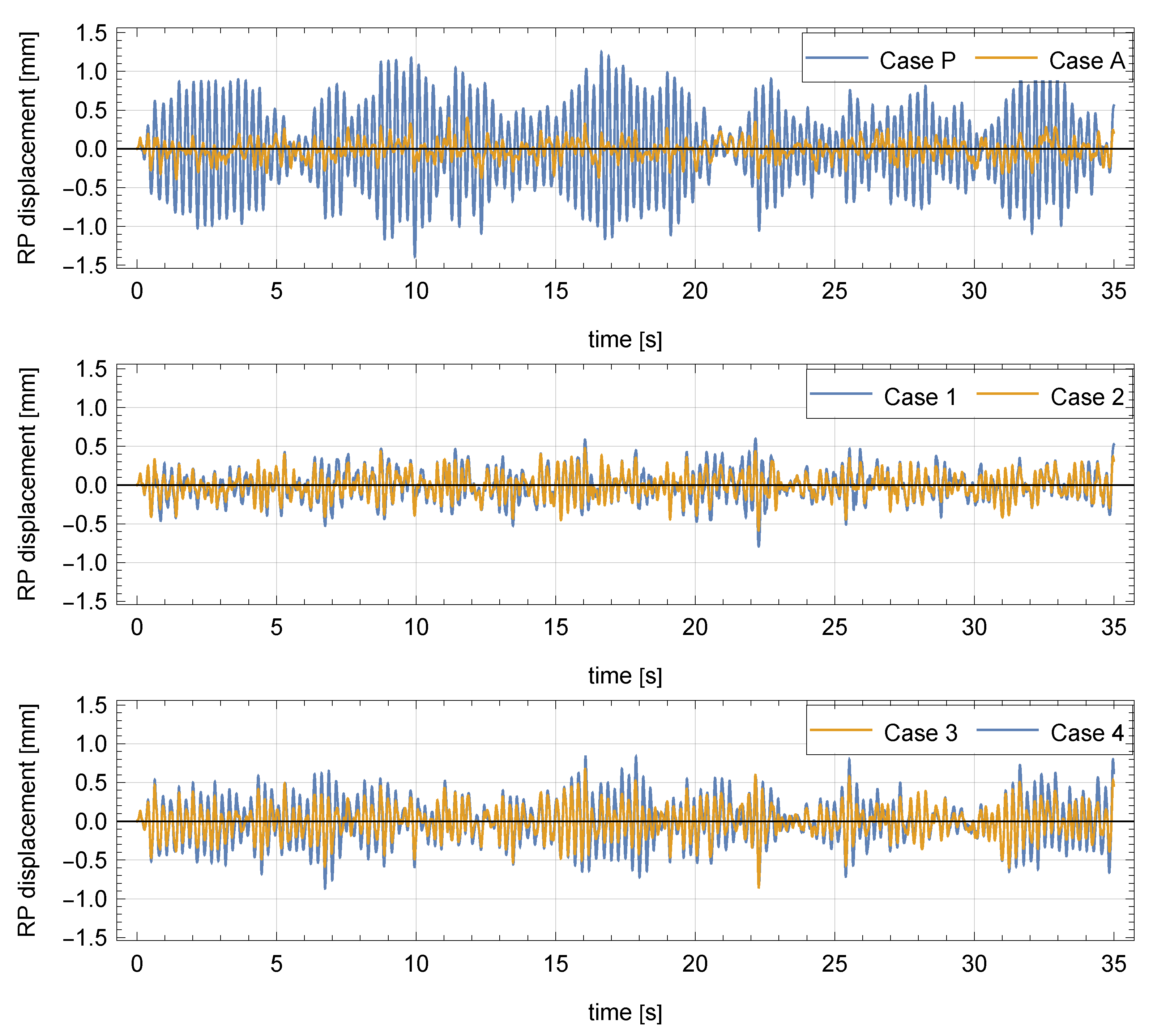
4.3. Results
- Passive structure (Case P in Table 2): This was the reference case. All the nodes remained in their "on” state throughout the entire simulation. This corresponded to a passive structure with typical rigid nodes and full transmission of moments;
- All stories controlled (Case A in Table 2): Nodes were controlled pairwise, independently, and synchronously for each of the four stories. There were four control functions: one function for each story;
- Single story controlled (Cases 1–4 in Table 2): The nodes of only a single story were controlled, while the other nodes remained in their "on” (rigid) state with the full transmission of moments. In each of these four cases, there was thus only one control function.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | No. of Control Functions | Remarks |
|---|---|---|
| P | 0 | Passive reference case. All nodes rigid |
| A | 4 | Each story controlled independently |
| 1 | 1 | Story No. 1 controlled. Other stories passive with rigid nodes |
| 2 | 1 | Story No. 2 controlled. Other stories passive with rigid nodes |
| 3 | 1 | Story No. 3 controlled. Other stories passive with rigid nodes |
| 4 | 1 | Story No. 4 controlled. Other stories passive with rigid nodes |
4.3.1. Root-Mean-Square Response
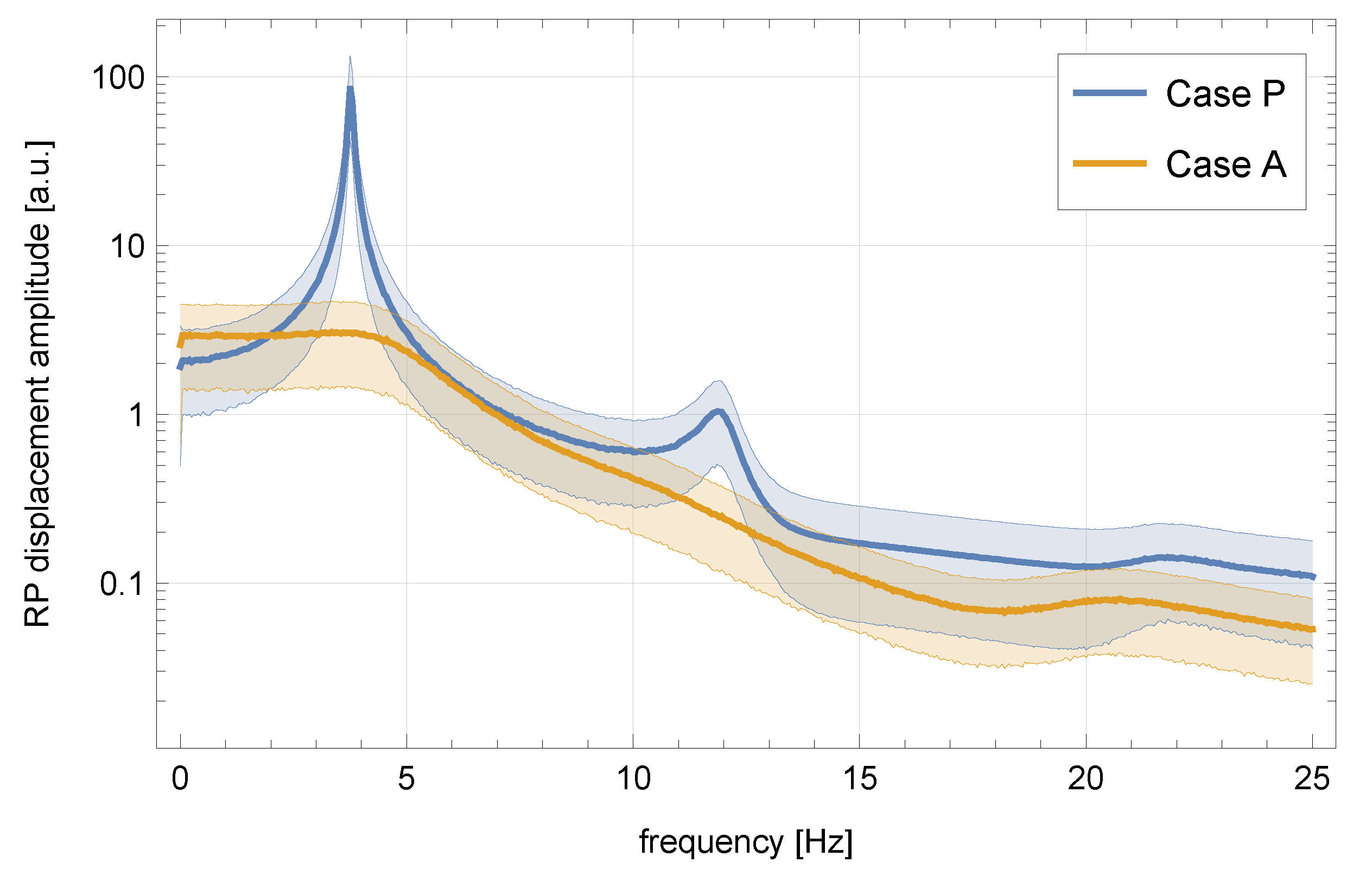
4.3.2. Frequency-Domain Response
| Case | Rms Ratio | Mean Amplitude Ratio | |
|---|---|---|---|
| Mean [%] | Standard Deviation [%] | First Mode [%] | |
| Case A | 21.63 | 4.52 | 03.51 |
| Case 1 | 36.84 | 7.25 | 11.89 |
| Case 2 | 29.12 | 5.60 | 07.80 |
| Case 3 | 37.05 | 7.02 | 14.49 |
| Case 4 | 51.60 | 9.41 | 29.35 |

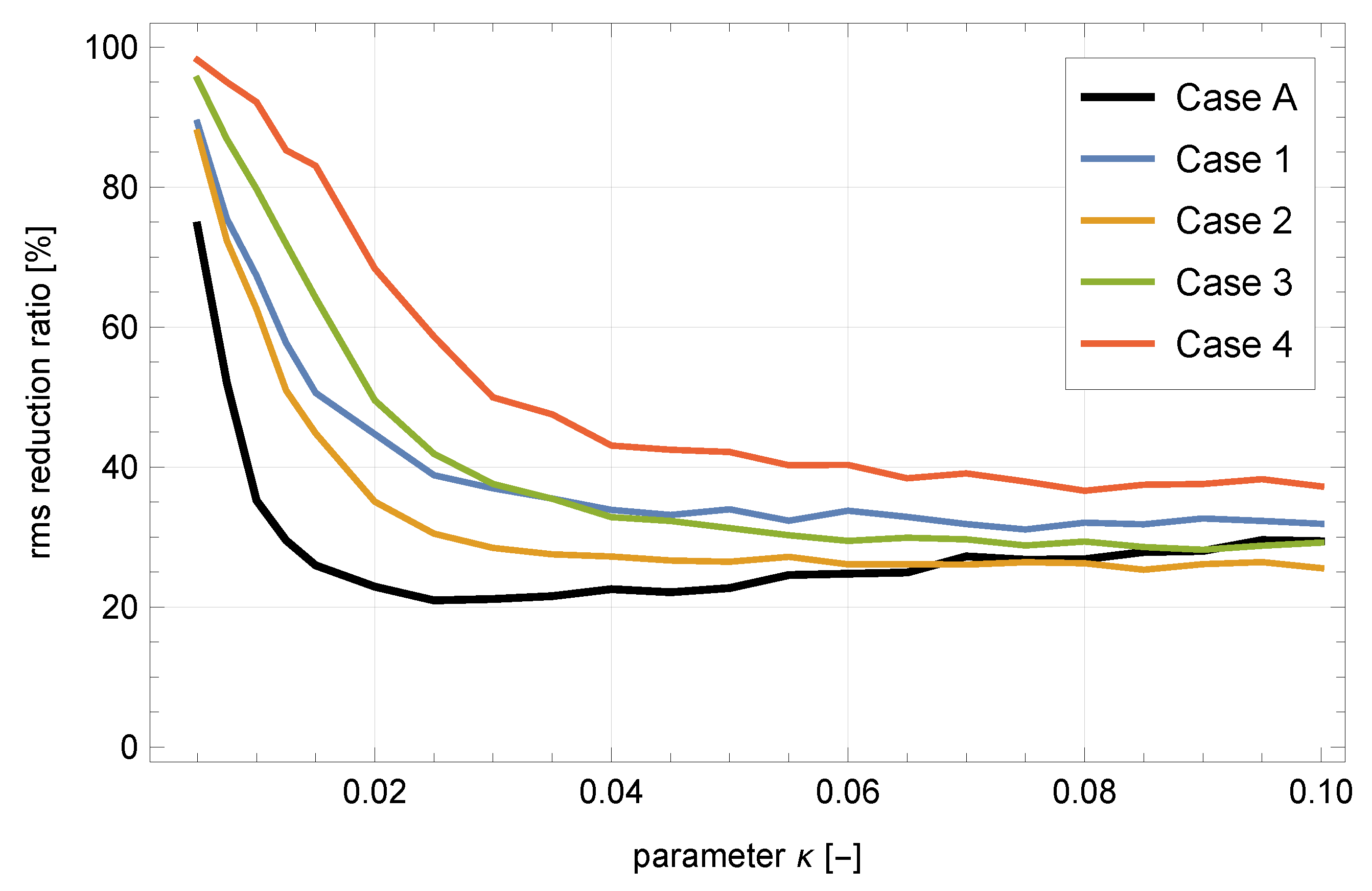
4.4. Sensitivity to Control Parameters
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| a.u. | Arbitrary units |
| DOF | Degree of freedom |
| FE | Finite element |
| FRF | Frequency response function |
| rms | Root-mean square |
| RP | Reference point |
References
- Basu, B.; Bursi, O.S.; Casciati, F.; Casciati, S.; Del Grosso, A.E.; Domaneschi, M.; Faravelli, L.; Holnicki-Szulc, J.; Irschik, H.; Krommer, M.; et al. A European association for the control of structures joint perspective. Recent studies in civil structural control across Europe. Struct. Control Health Monit. 2014, 21, 1414–1436. [Google Scholar] [CrossRef]
- Spencer, B., Jr.; Nagarajaiah, S. State of the art of structural control. J. Struct. Eng. 2003, 129, 845–856. [Google Scholar] [CrossRef]
- Casciati, F.; Rodellar, J.; Yildirim, U. Active and semi-active control of structures-theory and applications: A review of recent advances. J. Intell. Mater. Syst. Struct. 2012, 23, 1181–1195. [Google Scholar] [CrossRef]
- Saaed, T.E.; Nikolakopoulos, G.; Jonasson, J.E.; Hedlund, H. A state-of-the-art review of structural control systems. JVC/J. Vib. Control 2015, 21, 919–937. [Google Scholar] [CrossRef]
- Parulekar, Y.; Reddy, G. Passive response control systems for seismic response reduction: A state-of-the-art review. Int. J. Struct. Stab. Dyn. 2009, 9, 151–177. [Google Scholar] [CrossRef]
- Pawlak, Z.M.; Lewandowski, R. The effectiveness of the passive damping system combining the viscoelastic dampers and inerters. Int. J. Struct. Stab. Dyn. 2020, 20, 2050140. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, R.; Luo, Q.; Guo, X.; Cao, M. Study on optimal design of grotto–eave system with cable inerter viscous damper for vibration control. Buildings 2022, 12, 661. [Google Scholar] [CrossRef]
- Dai, H.; Jing, X.; Wang, Y.; Yue, X.; Yuan, J. Post-capture vibration suppression of spacecraft via a bio-inspired isolation system. Mech. Syst. Signal Process. 2018, 105, 214–240. [Google Scholar] [CrossRef]
- Warn, G.P.; Ryan, K.L. A review of seismic isolation for buildings: Historical development and research needs. Buildings 2012, 2, 300–325. [Google Scholar] [CrossRef] [Green Version]
- Elias, S.; Matsagar, V. Research developments in vibration control of structures using passive tuned mass dampers. Annu. Rev. Control 2017, 44, 129–156. [Google Scholar] [CrossRef]
- Lin, W.; Wang, A.; Chen, S.; Qi, A.; Su, Z. Structural vibration control with the implementation of a tuned mass rocking wall system. Buildings 2021, 11, 614. [Google Scholar] [CrossRef]
- Karnopp, D. Active and semi-active vibration isolation. J. Vib. Acoust. Trans. ASME 1995, 117, 177–185. [Google Scholar] [CrossRef]
- El Ouni, M.H.; Laissy, M.Y.; Ismaeil, M.; Kahla, N.B. Effect of shear walls on the active vibration control of buildings. Buildings 2018, 8, 164. [Google Scholar] [CrossRef] [Green Version]
- Korkmaz, S. A review of active structural control: Challenges for engineering informatics. Comput. Struct. 2011, 89, 2113–2132. [Google Scholar] [CrossRef]
- Shivashankar, P.; Gopalakrishnan, S. Review on the use of piezoelectric materials for active vibration, noise, and flow control. Smart Mater. Struct. 2020, 29, 053001. [Google Scholar] [CrossRef]
- Sabatini, M.; Gasbarri, P.; Monti, R.; Palmerini, G.B. Vibration control of a flexible space manipulator during on orbit operations. Acta Astronaut. 2012, 73, 109–121. [Google Scholar] [CrossRef]
- Symans, M.D.; Constantinou, M.C. Semi-active control systems for seismic protection of structures: A state-of-the-art review. Eng. Struct. 1999, 21, 469–487. [Google Scholar] [CrossRef]
- Preumont, A. Vibration Control of Active Structures: An Introduction, 3rd ed.; Springer: Dordrecht, The Netherlands, 2011. [Google Scholar]
- Garrido, H.; Curadelli, O.; Ambrosini, D. On the assumed inherent stability of semi-active control systems. Eng. Struct. 2018, 159, 286–298. [Google Scholar] [CrossRef]
- Fisco, N.; Adeli, H. Smart structures: Part I — Active and semi-active control. Sci. Iran. 2011, 18, 275–284. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Jing, X.; Cheng, L. Magnetorheological fluid dampers: A review on structure design and analysis. J. Intell. Mater. Syst. Struct. 2012, 23, 839–873. [Google Scholar] [CrossRef]
- Kirk, D.E. Optimal Control Theory: An Introduction; Dover Publications: Mineola, NY, USA, 2004. [Google Scholar]
- Potter, J.N.; Neild, S.A.; Wagg, D.J. Generalisation and optimisation of semi-active, on-off switching controllers for single degree-of-freedom systems. J. Sound Vib. 2010, 329, 2450–2462. [Google Scholar] [CrossRef] [Green Version]
- Onoda, J.; Endo, T.; Tamaoki, H.; Watanabe, N. Vibration suppression by variable-stiffness members. AIAA J. 1991, 29, 977–983. [Google Scholar] [CrossRef]
- Onoda, J.; Minesugi, K. Semiactive vibration suppression of truss structures by coulomb friction. J. Spacecr. Rocket. 1994, 31, 67–74. [Google Scholar] [CrossRef]
- Ferri, A.A.; Heck, B.S. Analytical investigation of damping enhancement using active and passive structural joints. J. Guid. Control. Dyn. 1992, 15, 1258–1264. [Google Scholar] [CrossRef]
- Gaul, L.; Lenz, J.; Sachau, D. Active damping of space structures by contact pressure control in joints. Mech. Struct. Mach. 1998, 26, 81–100. [Google Scholar] [CrossRef]
- Gaul, L.; Nitsche, R. Friction control for vibration suppression. Mech. Syst. Signal Process. 2000, 14, 139–150. [Google Scholar] [CrossRef]
- Gaul, L.; Nitsche, R. The role of friction in mechanical joints. Appl. Mech. Rev. 2001, 54, 93–106. [Google Scholar] [CrossRef]
- Mróz, A.; Holnicki-Szulc, J.; Biczyk, J. Prestress Accumulation-Release Technique for Damping of Impact-Born Vibrations: Application to Self-Deployable Structures. Math. Probl. Eng. 2015, 2015. [Google Scholar] [CrossRef] [Green Version]
- Poplawski, B.; Mikułowski, G.; Wiszowaty, R.; Jankowski, Ł. Mitigation of forced vibrations by semi-active control of local transfer of moments. Mech. Syst. Signal Process. 2021, 157, 107733. [Google Scholar] [CrossRef]
- Mikułowski, G.; Poplawski, B.; Jankowski, Ł. Semi-active vibration control based on switchable transfer of bending moments: Study and experimental validation of control performance. Smart Mater. Struct. 2021, 30, 045005. [Google Scholar] [CrossRef]
- Ostrowski, M.; Blachowski, B.; Poplawski, B.; Pisarski, D.; Mikulowski, G.; Jankowski, L. Semi-active modal control of structures with lockable joints: General methodology and applications. Struct. Control Health Monit. 2021, 28, e2710. [Google Scholar] [CrossRef]
- Orlowska, A.; Galezia, A.; Swiercz, A.; Jankowski, L. Mitigation of vibrations in sandwich-type structures by a controllable constrained layer. JVC/J. Vib. Control 2021, 27, 1595–1605. [Google Scholar] [CrossRef]
- Young, K.D.; Utkin, V.I.; Özgüner, Ü. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef] [Green Version]
- Michajłow, M.; Jankowski, Ł.; Szolc, T.; Konowrocki, R. Semi-active reduction of vibrations in the mechanical system driven by an electric motor. Optim. Control Appl. Methods 2017, 38, 922–933. [Google Scholar] [CrossRef]
- Poplawski, B.; Mikułowski, G.; Mróz, A.; Jankowski, Ł. Decentralized semi-active damping of free structural vibrations by means of structural nodes with an on/off ability to transmit moments. Mech. Syst. Signal Process. 2018, 100, 926–939. [Google Scholar] [CrossRef]
- Lee, H.; Utkin, V.I. Chattering suppression methods in sliding mode control systems. Annu. Rev. Control 2007, 31, 179–188. [Google Scholar] [CrossRef]
- Bathe, K.J. Finite Element Procedures, 2nd ed.; Pearson College Div: Victoria, BC, Canada, 2014. [Google Scholar]
- Krenk, S. Energy conservation in Newmark based time integration algorithms. Comput. Methods Appl. Mech. Eng. 2006, 195, 6110–6124. [Google Scholar] [CrossRef]
- Poplawski, B.; Mikułowski, G.; Pisarski, D.; Wiszowaty, R.; Jankowski, Ł. Optimum actuator placement for damping of vibrations using the Prestress-Accumulation Release control approach. Smart Struct. Syst. 2019, 24, 27–35. [Google Scholar] [CrossRef]
- Zawidzki, M.; Jankowski, Ł. Multiobjective optimization of modular structures: Weight versus geometric versatility in a Truss-Z system. Comput.-Aided Civ. Infrastruct. Eng. 2019, 34, 1026–1040. [Google Scholar] [CrossRef]








| Mode No. | All Nodes “off” (Unlocked Hinges) | All Nodes Rigid | ||
|---|---|---|---|---|
| Natural Freq. [Hz] | Damping Ratio [%] | Natural Freq. [Hz] | Damping Ratio [%] | |
| 1 | 0000.86 | 000.23 | 0003.76 | 001.00 |
| 2 | 0005.47 | 001.45 | 0011.97 | 003.18 |
| 3 | 0015.38 | 004.09 | 0021.49 | 005.72 |
| 4 | 0028.08 | 007.47 | 0030.44 | 008.09 |
| 5 | 0128.99 | 034.30 | 0134.38 | 035.73 |
| … | … | … | … | … |
| 24 | 0886.15 | 235.62 | 1666.34 | 443.06 |
| … | … | … | ||
| 30 | 1368.34 | 363.82 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ostrowski, M.; Jedlińska, A.; Popławski, B.; Blachowski, B.; Mikułowski, G.; Pisarski, D.; Jankowski, Ł. Sliding Mode Control for Semi-Active Damping of Vibrations Using on/off Viscous Structural Nodes. Buildings 2023, 13, 348. https://doi.org/10.3390/buildings13020348
Ostrowski M, Jedlińska A, Popławski B, Blachowski B, Mikułowski G, Pisarski D, Jankowski Ł. Sliding Mode Control for Semi-Active Damping of Vibrations Using on/off Viscous Structural Nodes. Buildings. 2023; 13(2):348. https://doi.org/10.3390/buildings13020348
Chicago/Turabian StyleOstrowski, Mariusz, Aleksandra Jedlińska, Błażej Popławski, Bartlomiej Blachowski, Grzegorz Mikułowski, Dominik Pisarski, and Łukasz Jankowski. 2023. "Sliding Mode Control for Semi-Active Damping of Vibrations Using on/off Viscous Structural Nodes" Buildings 13, no. 2: 348. https://doi.org/10.3390/buildings13020348
APA StyleOstrowski, M., Jedlińska, A., Popławski, B., Blachowski, B., Mikułowski, G., Pisarski, D., & Jankowski, Ł. (2023). Sliding Mode Control for Semi-Active Damping of Vibrations Using on/off Viscous Structural Nodes. Buildings, 13(2), 348. https://doi.org/10.3390/buildings13020348