

_Mei.png)
A Two-Step FE Model Updating Approach for System and Damage Identification of Prestressed Bridge Girders

 ,
, 
Abstract
:1. Introduction
- Unknown boundary conditions often challenge the application of time-domain model updating for bridges since the model parameters are often dependent on the boundary conditions. Here, the modal-based model updating is used to identify the boundary conditions first.
- The application of modal-based model updating for damage identification of bridges is limited. This is likely due to the uncertainties in the identified modal signatures that propagate through the parameter estimation process. Therefore, here, the estimation of model parameters for damage identification will be refined through a subsequent time-domain model updating.
- The dynamic measurements can provide more information about the uncertain material parameters compared to the static/pseudo-static responses. Hence, here, the acceleration measurements are used directly in the time-domain model updating.
- To improve the numerical stability and convergence of the model parameters the linear and nonlinear response behavior of the bridge are assimilated through the two-step model updating process.
2. Material, Test Methodology, and Preliminary Results
2.1. Description of the Field Experiment
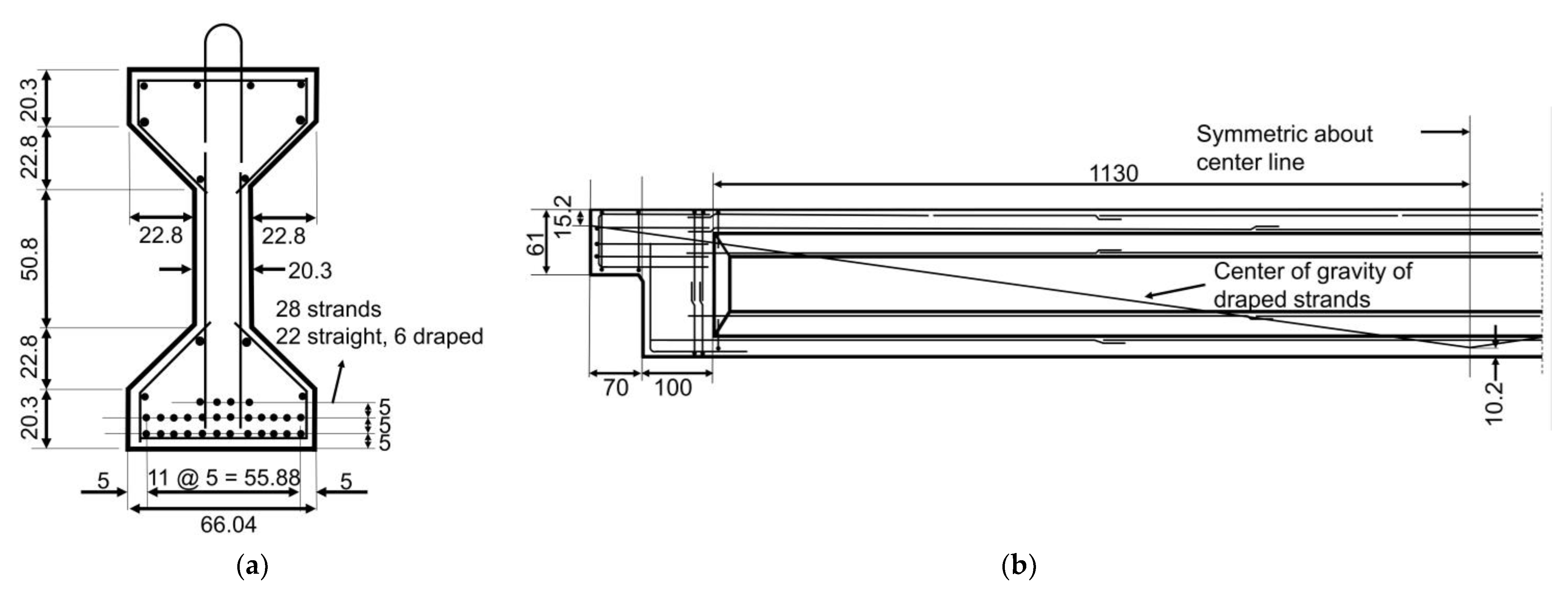
2.1.1. Testbed Structure
2.1.2. Dynamic Excitation System
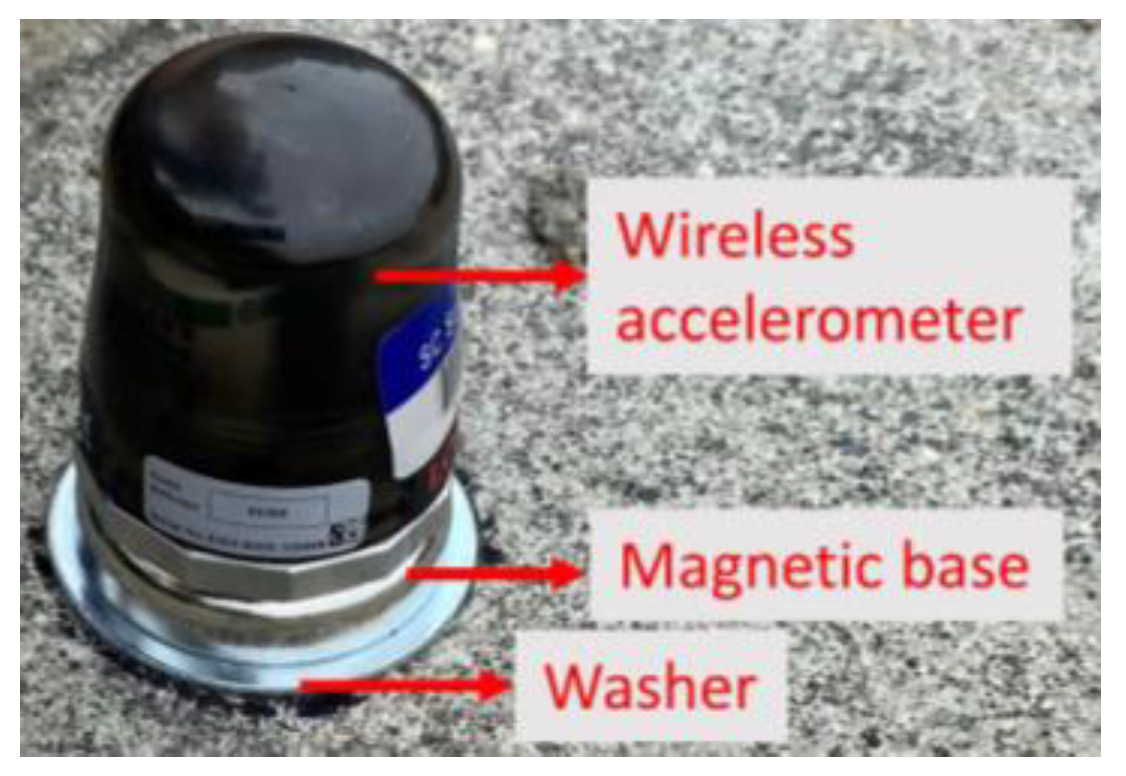
2.1.3. Wireless Sensing Network
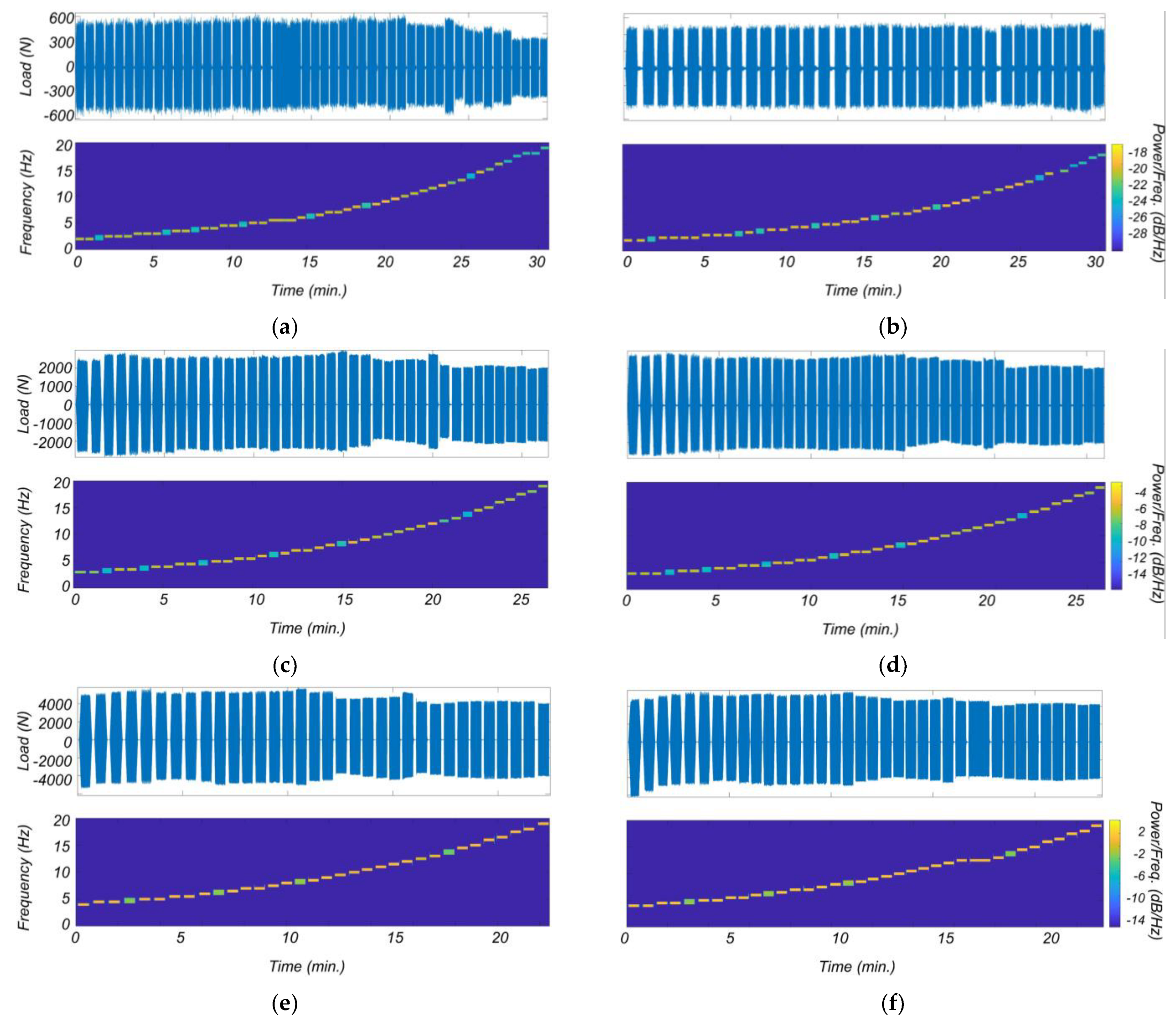
2.1.4. Forced-Vibration Testing
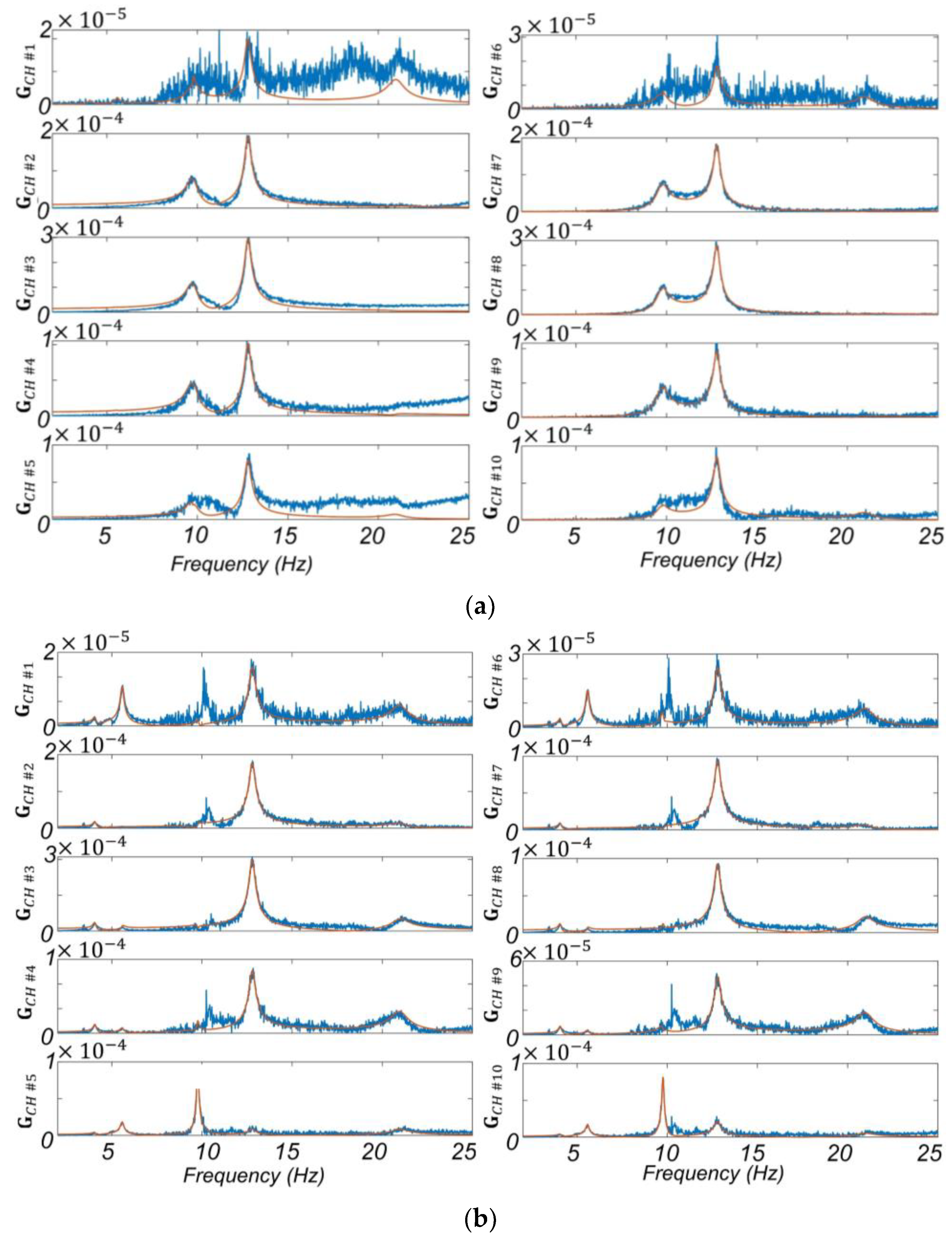
2.2. Modal Identification
2.3. Finite Element Modeling of the Testbed Structure
3. Two-Step Model Updating: Methodology, Results, and Discussion
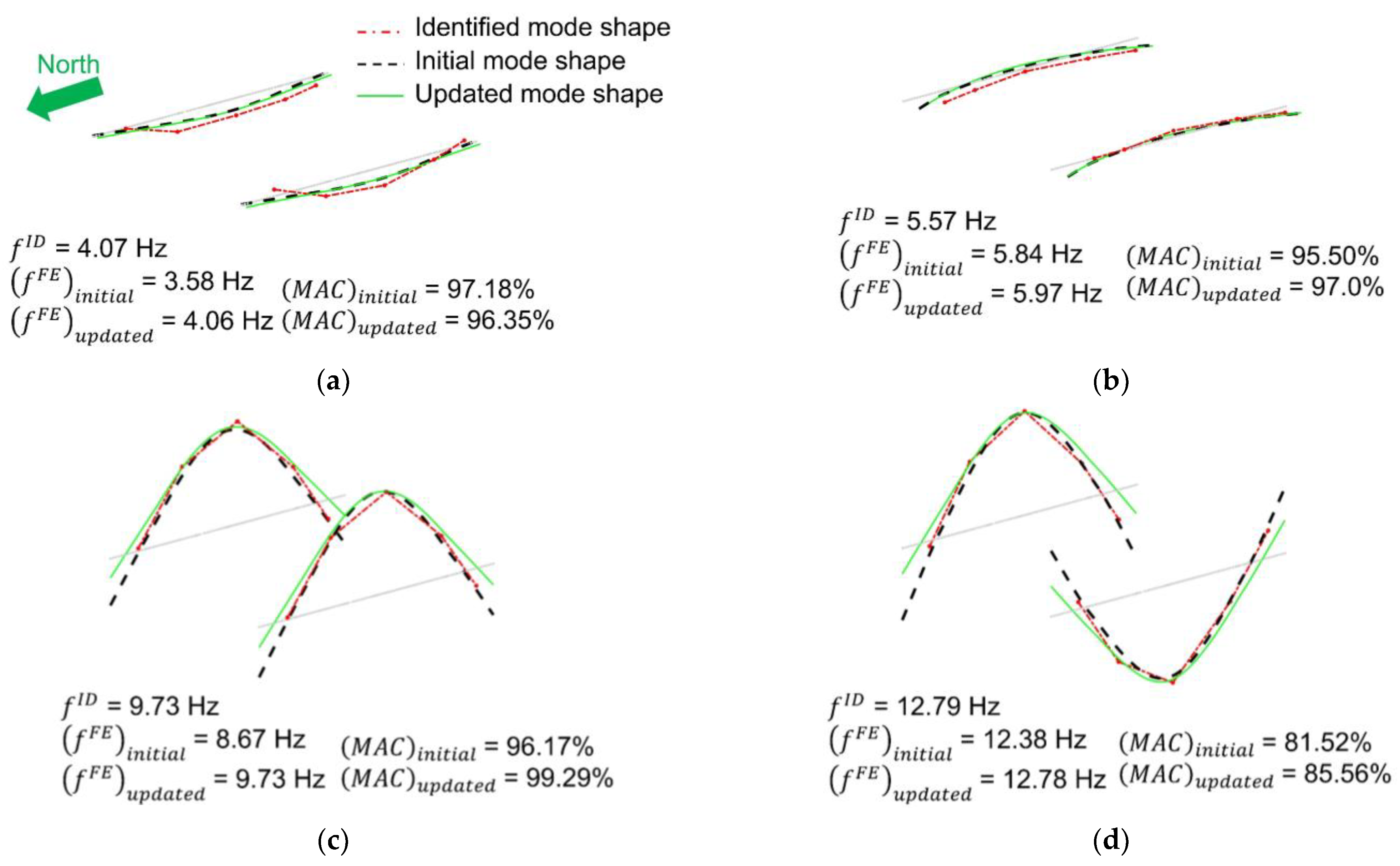
3.1. First Step: Modal-Based Model Updating
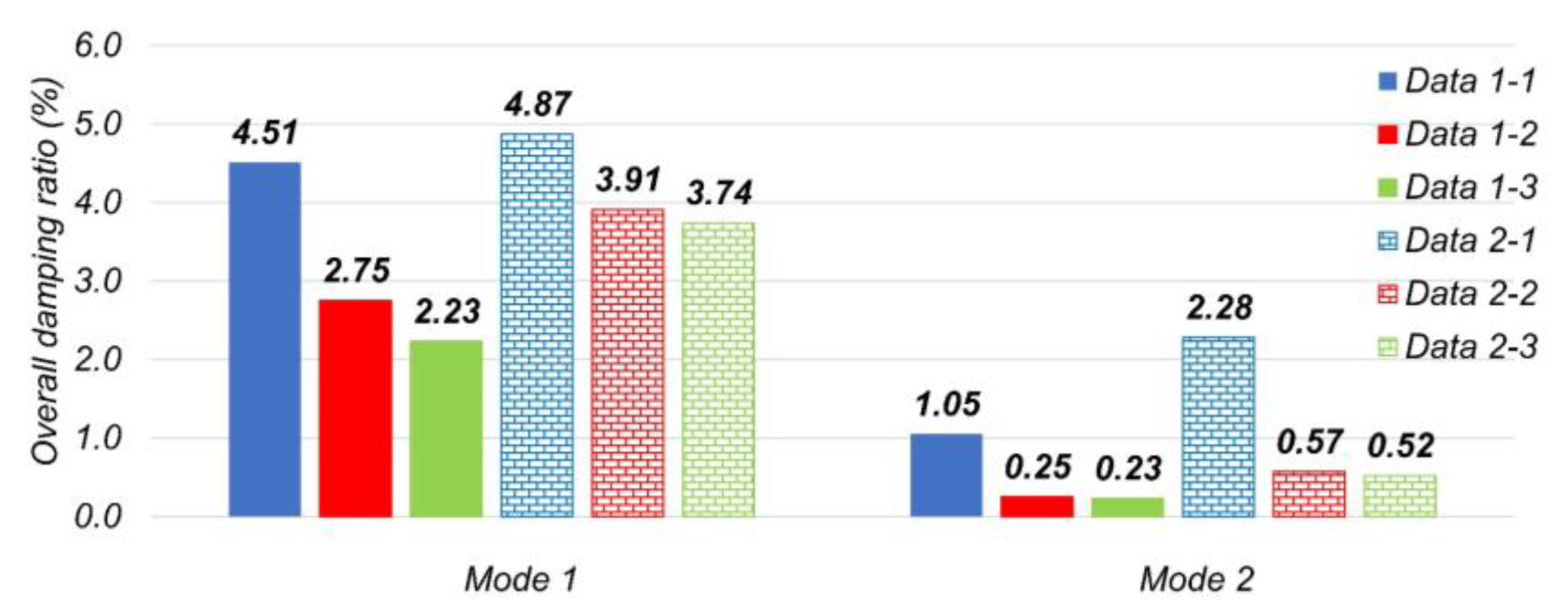
3.2. Second Step: Time-Domain Model Updating
3.2.1. Identifiability Analysis for Time-Domain Model Updating
3.2.2. Bayesian Inference
3.2.3. Results
4. Conclusions
- Identifiability analysis showed significant mutual dependency between different model parameters. This mutual dependency could lead to weak identifiability of model parameters in the traditional FE model updating process. The proposed two-step model updating helped with this challenge to update the most sensitive model parameters separately using modal-based and time-domain model updating.
- Sequential application of modal-based and time-domain model updating reduced the challenges due to ill-conditioning and modeling errors.
- It was demonstrated that the updated FE model using only modal-based model updating was not capable of reflecting true response behavior of the structure in time domain.
- Concrete compressive strength was correlated with damage/deterioration in the monitored structure and could be used to assess the health condition of the structure. In this study, a 30% reduction in concrete compressive strength from its nominal value correctly showed significant deterioration in the studied girders.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shahsavari, V.; Mehrkash, M.; Santini-Bell, E. Damage Detection and Decreased Load-Carrying Capacity Assessment of a Vertical-Lift Steel Truss Bridge. J. Perform. Constr. Facil. 2020, 34, 04019123. [Google Scholar] [CrossRef]
- ASCE. ASCE’s 2021 Infrastructure Report Card. 2021. Available online: https://infrastructurereportcard.org/cat-item/bridges/ (accessed on 1 May 2022).
- Friswell, M.; Mottershead, J. Finite Element Model Updating in Structural Dynamic; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar] [CrossRef]
- Zapico, J.; González, M.; Friswell, M.; Taylor, C.; Crewe, A. Finite element model updating of a small scale bridge. J. Sound Vib. 2003, 268, 993–1012. [Google Scholar] [CrossRef]
- Xiao, X.; Xu, Y.; Zhu, Q. Multiscale modeling and model updating of a cable-stayed bridge. II: Model updating using modal frequencies and influence lines. J. Bridg. Eng. 2015, 20, 04014113. [Google Scholar] [CrossRef]
- Li, Y.; Astroza, R.; Conte, J.; Soto, P. Nonlinear FE model updating of seismic isolated bridge instrumented during the 2010 Mw 8.8 Maule-Chile Earthquake. Procedia Eng. 2017, 199, 3003–3008. [Google Scholar] [CrossRef]
- Taciroglu, E.; Shamsabadi, A.; Abazarsa, F.; Nigbor, R.; Ghahari, S. Comparative study of model predictions and data from the Caltrans-CSMIP bridge instrumentation program: A case study on the Eureka-Samoa channel bridge. Sacramento 2014. [Google Scholar] [CrossRef]
- Ereiz, S.; Duvnjak, I.; Jiménez-Alonso, J.F. Review of finite element model updating methods for structural applications. Structures 2022, 41, 684–723. [Google Scholar] [CrossRef]
- McCoy, R. HedegaardBrock, ShieldCarol, LindermanLauren, Updated long-term Bayesian Monitoring Strategy for time-dependent deflections of I-35W Saint Anthony Falls Bridge. In International Conference on Structural Health Monitoring of Intelligent Infrastructure: Transferring Research into Practice; SHMII: Porto, Portugal, 2021; pp. 1141–1147. Available online: https://experts.umn.edu/en/publications/updated-long-term-bayesian-monitoring-strategy-for-time-dependent (accessed on 1 November 2022).
- Teughels, A.; De Roeck, G. Structural damage identification of the highway bridge Z24 by FE model updating, J. Sound Vib. 2004, 278, 589–610. [Google Scholar] [CrossRef]
- Schlune, H.; PLoS, M.; Gylltoft, K. Improved bridge evaluation through finite element model updating using static and dynamic measurements. Eng. Struct. 2009, 31, 1477–1485. [Google Scholar] [CrossRef]
- Costa, C.; Arêde, A.; Costa, A.; Caetano, E.; Cunha, A.; Magalhaes, F. Updating numerical models of masonry arch bridges by operational modal analysis. Int. J. Archit. Herit. 2015, 9, 760–774. [Google Scholar] [CrossRef]
- He, L.; Reynders, E.; García-Palacios, J.; Marano, G.; Briseghella, B.; De Roeck, G. Wireless-based identification and model updating of a skewed highway bridge for structural health monitoring. Appl. Sci. 2020, 10, 2347. [Google Scholar] [CrossRef]
- Tran-Ngoc, H.; Khatir, S.; De Roeck, G.; Bui-Tien, T.; Nguyen-Ngoc, L.; Wahab, M.A. Model updating for nam O bridge using particle swarm optimization algorithm and genetic algorithm. Sensors 2018, 18, 4131. [Google Scholar] [CrossRef]
- Mottershead, J.; Friswell, M. Model updating in structural dynamics: A survey. J. Sound Vib. 1993, 167, 347–375. [Google Scholar] [CrossRef]
- Ghahari, F.; Malekghaini, N.; Ebrahimian, H.; Taciroglu, E. Bridge digital twinning using an output-only Bayesian model updating method and recorded seismic measurements. Sensors 2022, 22, 1278. [Google Scholar] [CrossRef] [PubMed]
- Abedin, M.; De Caso y Basalo, F.; Kiani, N.; Mehrabi, A.; Nanni, A. Bridge load testing and damage evaluation using model updating method. Eng. Struct. 2022, 252, 113648. [Google Scholar] [CrossRef]
- Magalhães, F.; Cunha, Á.; Caetano, E. Online automatic identification of the modal parameters of a long span arch bridge. Mech. Syst. Signal Process. 2009, 23, 316–329. [Google Scholar] [CrossRef]
- Juang, J.-N. Applied System Identification; Prentice Hall: Englewood Cliffs, NJ, USA, 1994. [Google Scholar]
- James, G., III; Carne, T.; Lauffer, J. The Natural Excitation Technique (NExT) for Modal Parameter Extraction from Operating Wind Turbines, United States. 1993. Available online: https://www.osti.gov/biblio/10139203 (accessed on 1 November 2021).
- Ljung, L. System Identification Theory for the User, 2nd ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1999. [Google Scholar]
- Ewins, D.J. Modal testing: Theory, Practice and Application, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Saidin, S.; Kudus, S.; Jamadin, A.; Anuar, M.; Amin, N.; Ibrahim, Z.; Zakaria, A.; Sugiura, K. Operational modal analysis and finite element model updating of ultra-high-performance concrete bridge based on ambient vibration test. Case Stud. Constr. Mater. 2022, 16, e01117. [Google Scholar] [CrossRef]
- Moaveni, B.; He, X.; Conte, J.; Restrepo, J. Damage identification study of a seven-story full-scale building slice tested on the UCSD-NEES shake table. Struct. Saf. 2010, 32, 347–356. [Google Scholar] [CrossRef]
- Farrar, C.; Baker, W.; Bell, T.; Cone, K.; Darling, T.; Duffey, T.; Eklund, A.; Migliori, A. Dynamic Characterization and Damage Detection in the I-40 Bridge Over the Rio Grande; LA-12767-M, Technical Report; U.S. Department of Energy: Los Alamos, NM, USA, 1994; pp. 1–153. [Google Scholar] [CrossRef]
- Farrar, C.; Cornwell, P. Structural Health Monitoring Studies of the Alamosa Canyon and I-40 Bridges; Technical Report; U.S. Department of Energy: Los Alamos, NM, USA, 2000. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Wu, H.; You, X.; Xie, H. Model updating-based dynamic collapse analysis of a RC cable-stayed bridge under earthquakes. Structures 2022, 43, 1100–1113. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Astroza, R.; Conte, J.; Papadimitriou, C. Bayesian optimal estimation for output-only nonlinear system and damage identification of civil structures. Struct. Control Heal. Monit. 2018, 25, e2128. [Google Scholar] [CrossRef]
- Zhou, X.; Kim, C.; Zhang, F.; Chang, K. Vibration-based Bayesian model updating of an actual steel truss bridge subjected to incremental damage. Eng. Struct. 2022, 260, 114226. [Google Scholar] [CrossRef]
- Xia, Z.; Li, A.; Li, J.; Shi, H.; Duan, M.; Zhou, G. Model updating of an existing bridge with high-dimensional variables using modified particle swarm optimization and ambient excitation data. Meas. J. Int. Meas. Confed. 2020, 159, 107754. [Google Scholar] [CrossRef]
- Fan, W.; Qiao, P. Vibration-based damage identification methods: A review and comparative study. Struct. Heal. Monit. 2011, 10, 83–111. [Google Scholar] [CrossRef]
- Saidin, S.; Kudus, S.; Jamadin, A.; Anuar, M.; Amin, N.; Ya, A.; Sugiura, K. Vibration-based approach for structural health monitoring of ultra-high-performance concrete bridge. Case Stud. Constr. Mater. 2023, 18, e01752. [Google Scholar] [CrossRef]
- Cheng, X.; Dong, J.; Cao, S.; Han, X.; Miao, C. Static and dynamic structural performances of a special-shaped concrete-filled steel tubular arch bridge in extreme events using a validated computational model. Arab. J. Sci. Eng. 2018, 43, 1839–1863. [Google Scholar] [CrossRef]
- Mao, J.; Wang, H.; Li, J. Bayesian finite element model updating of a long-span suspension bridge utilizing hybrid Monte Carlo simulation and Kriging predictor. KSCE J. Civ. Eng. 2020, 24, 569–579. [Google Scholar] [CrossRef]
- Dong, X.; Wang, Y. Finite element model. In Computing in Civil Engineering 2019: Smart Cities, Sustainability, and Resilienc; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 397–404. [Google Scholar]
- Fang, C.; Liu, H.; Lam, H.; Adeagbo, M.; Peng, H. Practical model updating of the Ting Kau bridge through the MCMC-based Bayesian algorithm utilizing measured modal parameters. Eng. Struct. 2022, 254, 113839. [Google Scholar] [CrossRef]
- Polanco, N.; May, G.; Hernandez, E. Finite element model updating of semi-composite bridge decks using operational acceleration measurements. Eng. Struct. 2016, 126, 264–277. [Google Scholar] [CrossRef] [Green Version]
- Shi, Z.; Hong, Y.; Yang, S. Updating boundary conditions for bridge structures using modal parameters. Eng. Struct. 2019, 196, 109346. [Google Scholar] [CrossRef]
- Chen, S.; Zhong, Q.; Hou, S.; Wu, G. Two-stage stochastic model updating method for highway bridges based on long-gauge strain sensing. Structures 2022, 37, 1165–1182. [Google Scholar] [CrossRef]
- Luo, L. Finite element model updating method for continuous girder bridges using monitoring responses and traffic videos. Struct. Control. Health Monit. 2022, 29, e3062. [Google Scholar] [CrossRef]
- Kim, S.; Kim, N.; Park, Y.; Jin, S. A sequential framework for improving identifiability of FE model updating using static and dynamic data. Sensors 2019, 19, 5099. [Google Scholar] [CrossRef]
- Azam, S.E.; Didyk, M.M.; Linzell, D.; Rageh, A. Experimental validation and numerical investigation of virtual strain sensing methods for steel railway bridges. J. Sound Vib. 2022, 537, 117207. [Google Scholar] [CrossRef]
- Ramancha, M.; Astroza, R.; Madarshahian, R.; Conte, J. Bayesian updating and identifiability assessment of nonlinear finite element models. Mech. Syst. Signal Process. 2022, 167, 108517. [Google Scholar] [CrossRef]
- Yu, E.; Taciroglu, E.; Wallace, J. Parameter identification of framed structures using an improved finite element model-updating method—Part I: Formulation and verification. Int. Assoc. Earthq. Eng. 2007, 36, 619–639. [Google Scholar] [CrossRef]
- Gucunski, N.; Lee, S.; Mazzotta, C.; Kee, S.; Pailes, B.; Fetrat, F. Protocols for Condition Assessment of Prestressed Concrete Girders using NDE and Physical Testing; Technical Report; Federal Highway Administrations: Washington, DC, USA, 2014. [Google Scholar]
- U.S. Department of Transportation, Federal Highway Administration. 2020. Available online: https://highways.dot.gov/research/turner-fairbank-highway-research-center/facility-overview (accessed on 1 November 2021).
- Adams, M.; Nicks, J.; Stabile, T. Thermal Activity of Geosynthetic Reinforced Soil Piers; IFCEE/ASCE: San Antonio, TX, USA, 2015. [Google Scholar] [CrossRef]
- Liu, P.C. Damage to concrete structures in a marine environment. Mater. Struct. 1997, 24, 302–307. [Google Scholar] [CrossRef]
- Parker Lord. 2022. Available online: https://www.microstrain.com (accessed on 1 August 2021).
- SensorConnect. 2022. Available online: https://www.microstrain.com/software/sensorconnect (accessed on 1 August 2021).
- Fulop, S.; Fitz, K. Algorithms for computing the time-corrected instantaneous frequency (reassigned) spectrogram, with applications. J. Acoust. Soc. Am. 2006, 119, 360–371. [Google Scholar] [CrossRef] [Green Version]
- Welch, P. The use of the fast fourier transform for the estimation of power spectra: A method based on time averaging over short, modified periodograms. IEEE Trans. Audio Electroacoust. 1967, 15, 70–73. [Google Scholar] [CrossRef]
- Overschee, P.; Moor, B. Subspace Identification for Linear Systems Theory—Implementation—Applications; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1996. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. Reference based stochastic subspace identification in Civil Engineering. Inverse Probl. Eng. 2000, 8, 47–74. [Google Scholar] [CrossRef]
- MathWorks, n4sid Estimate State-space Model. 2022. Available online: https://www.mathworks.com/help/ident/ref/n4sid.html (accessed on 1 April 2022).
- Bodeux, J.; Golinval, J. Application of ARMAV models to the identification and damage detection of mechanical and civil engineering structures. Smart Mater. Struct. 2001, 10, 479–489. [Google Scholar] [CrossRef]
- MathWorks, sset Estimate State-space Mode. 2022. Available online: https://www.mathworks.com/help/ident/ref/ssest.html (accessed on 1 April 2022).
- McKenna, F. OpenSees: A framework for earthquake engineering simulation. Comput. Sci. Eng. 2011, 13, 58–66. [Google Scholar] [CrossRef]
- Naeim, F.; Kelly, J. Design of Seismic Isolated Structures: From Theory to Practice; John Wiley & Sons: New York, NY, USA, 1999. [Google Scholar]
- Chopra, A. Dynamics of Structures, 4th, ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Nabiyan, M.; Khoshnoudian, F.; Moaveni, B.; Ebrahimian, H. Mechanics-based model updating for identification and virtual sensing of an offshore wind turbine using sparse measurements. Struct. Control Heal. Monit. 2021, 28. [Google Scholar] [CrossRef]
- MathWorks. Matlab R2022a. 2022. Available online: https://www.mathworks.com/?s_tid=gn_logo (accessed on 1 April 2022).
- MathWorks. fmincon Algorithms. 2022. Available online: https://www.mathworks.com/help/optim/ug/choosing-the-algorithm.html (accessed on 1 April 2022).
- Van Den Abeele, K. Damage assessment in reinforced concrete using nonlinear vibration techniques. AIP Conf. Proc. 2003, 30, 341–344. [Google Scholar] [CrossRef]
- Gucunski, N.; Imani, A.; Romero, F.; Nazarian, S.; Yuan, D.; Wiggenhauser, H.; Shokouhi, P.; Taffe, A.; Kutrubes, D. Nondestructive Testing to Identify Concrete Bridge Deck Deterioration; Transportation Research Board: Washington, DC, USA, 2013; Available online: https://nap.nationalacademies.org/catalog/22771/nondestructive-testing-to-identify-concrete-bridge-deck-deterioration (accessed on 1 November 2021).
- Fernandez, I.; Herrador, M.; Marí, A.; Bairán, J. Structural effects of steel reinforcement corrosion on statically indeterminate reinforced concrete members. Mater. Struct. Constr. 2016, 49, 4959–4973. [Google Scholar] [CrossRef]
- Zhu, W. Effect of Corrosion on The Mechanical Properties of the Corroded Reinforcement and the Residual Structural Performance of the Corroded Beams, Universite de Toulouse. 2015. Available online: https://tel.archives-ouvertes.fr/tel-01222175/document (accessed on 1 November 2021).
- Ebrahimian, H.; Astroza, R.; Conte, J.; Bitmead, R. Information-theoretic approach for identifiability assessment of nonlinear structural finite-element models. J. Eng. Mech. 2019, 145, 04019039. [Google Scholar] [CrossRef]
- Song, M.; Astroza, R.; Ebrahimian, H.; Moaveni, B.; Papadimitriou, C. Adaptive Kalman filters for nonlinear finite element model updating. Mech. Syst. Signal Process. 2020, 143, 106837. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Kohler, M.; Massari, A.; Asimaki, D. Parametric estimation of dispersive viscoelastic layered media with application to structural health monitoring. Soil Dyn. Earthq. Eng. 2018, 105, 204–223. [Google Scholar] [CrossRef]
- Ebrahimian, H.; Astroza, R.; Conte, J. Extended Kalman filter for material parameter estimation in nonlinear structural finite element models using direct differentiation method. Earthq. Eng. Struct. Dyn. 2015, 44, 1495–1522. [Google Scholar] [CrossRef]
- Ismail, M.; Muhammad, B.; Ismail, M. Compressive strength loss and reinforcement degradations of reinforced concrete structure due to long-term exposure. Constr. Build. Mater. 2010, 24, 898–902. [Google Scholar] [CrossRef]
- Li, B.; Cai, L.; Wang, K.; Zhang, Y. Prediction of the residual strength for durability failure of concrete structure in acidic environments. J. Wuhan Univ. Technol. Mater. Sci. Ed. 2016, 31, 340–344. [Google Scholar] [CrossRef]
- Rainieri, C.; Fabbrocino, G.; Cosenza, E. Some remarks on experimental estimation of damping for seismic design of civil constructions. Shock Vib. 2010, 17, 383–395. [Google Scholar] [CrossRef]
- Liang, C.; Liu, T.; Xiao, J.; Zou, D.; Yang, Q. The damping property of recycled aggregate concrete. Constr. Build. Mater. 2016, 102, 834–842. [Google Scholar] [CrossRef]
- Chen, G.; Omenzetter, P.; Beskhyroun, S. Modal systems identification of an eleven-span concrete motorway off-ramp bridge using various excitations. Eng. Struct. 2021, 229, 111604. [Google Scholar] [CrossRef]
- Brownjohn, J.; Dumanoglu, A.; Severn, R.; Blakeborough, A. Ambient vibration survey of the bosporus suspension bridge. Int. Assoc. Earthq. Eng. 1989, 18, 263–283. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode Number | ||||||
|---|---|---|---|---|---|---|
| 1 (Tr *) | 2 (Tr) | 3 (V **) | 4 (Tr) | 5 (V) | 6 (To ***) | |
| 4.07 | 5.57 | 9.73 | 9.76 | 12.79 | 20.98 | |
| 1.92 | 1.78 | 2.97 | 0.60 | 1.39 | 2.18 | |
| Parameter | Parameter Description | Initial Values |
|---|---|---|
| Concrete compressive strength/Concrete modulus of elasticity for the west girder | 46 MPa/46 GPa | |
| Concrete compressive strength/Concrete modulus of elasticity for the east girder | 46 MPa/46 GPa | |
| Modulus of elasticity for coupling beams | 30 GPa | |
| Rotational stiffness of bearing pads about directions 1 and 2 and 3 | ||
| Vertical stiffness of bearing pads in direction 3 | ||
| Transverse stiffness of bearing pads in direction 1 | ||
| Longitudinal stiffness of bearing pads in direction 2 | ||
| Damping coefficient for bearing pads in direction 3 | ||
| Damping ratio for mode 1 | 0.02 | |
| Damping ratio for mode 2 | 0.02 |
| Parameter | ||||||
|---|---|---|---|---|---|---|
| Updated value | 39 MPa/39 GPa | 39 MPa/39 GPa | 28.23 GPa |
| Data I.D. | Layout | Target Load Amplitude | Excitation Frequencies | Data I.D. | Layout | Target Load Amplitude | Excitation Frequencies |
|---|---|---|---|---|---|---|---|
| 1-1 | 1 | 445 N | 9.73 Hz and 12.86 Hz | 2-1 | 2 | 445 N | 9.73 Hz and 12.86 Hz |
| 1-2 | 1 | 2225 N | 9.73 Hz and 12.86 Hz | 2-2 | 2 | 2225 N | 9.73 Hz and 12.86 Hz |
| 1-3 | 1 | 4450 N | 9.73 Hz and 12.86 Hz | 2-3 | 2 | 4450 N | 9.73 Hz and 12.86 Hz |
| 9.73 Hz Excitation Frequency | 12.86 Hz Excitation Frequency | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Data I.D. | CH # | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 1-1 | Prior | 201 | 75 | 74 | 80 | 66 | 170 | 76 | 74 | 83 | 46 | 161 | 63 | 63 | 70 | 67 | 202 | 67 | 68 | 72 | 97 |
| Posterior | 172 | 14 | 9 | 22 | 27 | 192 | 22 | 17 | 28 | 28 | 132 | 16 | 15 | 22 | 40 | 153 | 11 | 11 | 23 | 57 | |
| 1-2 | Prior | 163 | 107 | 110 | 102 | 127 | 119 | 101 | 102 | 99 | 101 | 300 | 112 | 117 | 103 | 164 | 565 | 133 | 140 | 109 | 269 |
| Posterior | 24 | 11 | 10 | 10 | 22 | 34 | 10 | 9 | 8 | 21 | 72 | 23 | 24 | 24 | 30 | 133 | 20 | 21 | 13 | 55 | |
| 1-3 | Prior | 191 | 128 | 134 | 116 | 165 | 137 | 114 | 118 | 108 | 130 | 429 | 146 | 156 | 126 | 235 | 1111 | 193 | 205 | 141 | 480 |
| Posterior | 24 | 11 | 12 | 20 | 21 | 46 | 11 | 13 | 18 | 18 | 90 | 33 | 35 | 35 | 41 | 254 | 27 | 28 | 20 | 93 | |
| 2-1 | Prior | 312 | 61 | 58 | 71 | 55 | 259 | 63 | 60 | 75 | 30 | 590 | 30 | 27 | 46 | 124 | 236 | 30 | 26 | 51 | 84 |
| Posterior | 191 | 8 | 8 | 18 | 46 | 213 | 17 | 14 | 23 | 50 | 312 | 7 | 4 | 22 | 68 | 133 | 9 | 9 | 22 | 54 | |
| 2-2 | Prior | 229 | 78 | 78 | 84 | 66 | 187 | 78 | 77 | 85 | 40 | 388 | 54 | 52 | 64 | 80 | 250 | 55 | 54 | 66 | 117 |
| Posterior | 139 | 11 | 9 | 20 | 46 | 172 | 18 | 15 | 20 | 60 | 236 | 7 | 7 | 17 | 65 | 175 | 9 | 7 | 26 | 72 | |
| 2-3 | Prior | 109 | 611 | 64 | 46 | 114 | 104 | 62 | 66 | 43 | 128 | 124 | 38 | 34 | 36 | 17 | 54 | 33 | 33 | 49 | 33 |
| Posterior | 83 | 8 | 7 | 17 | 52 | 99 | 12 | 11 | 11 | 61 | 180 | 9 | 10 | 13 | 49 | 177 | 10 | 9 | 21 | 82 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malekghaini, N.; Ghahari, F.; Ebrahimian, H.; Bowers, M.; Ahlberg, E.; Taciroglu, E. A Two-Step FE Model Updating Approach for System and Damage Identification of Prestressed Bridge Girders. Buildings 2023, 13, 420. https://doi.org/10.3390/buildings13020420
Malekghaini N, Ghahari F, Ebrahimian H, Bowers M, Ahlberg E, Taciroglu E. A Two-Step FE Model Updating Approach for System and Damage Identification of Prestressed Bridge Girders. Buildings. 2023; 13(2):420. https://doi.org/10.3390/buildings13020420
Chicago/Turabian StyleMalekghaini, Niloofar, Farid Ghahari, Hamed Ebrahimian, Matthew Bowers, Eric Ahlberg, and Ertugrul Taciroglu. 2023. "A Two-Step FE Model Updating Approach for System and Damage Identification of Prestressed Bridge Girders" Buildings 13, no. 2: 420. https://doi.org/10.3390/buildings13020420
APA StyleMalekghaini, N., Ghahari, F., Ebrahimian, H., Bowers, M., Ahlberg, E., & Taciroglu, E. (2023). A Two-Step FE Model Updating Approach for System and Damage Identification of Prestressed Bridge Girders. Buildings, 13(2), 420. https://doi.org/10.3390/buildings13020420