
Seismic Isolation of Fragile Pole-Type Structures by Rocking with Base Restraints


Abstract
:1. Introduction

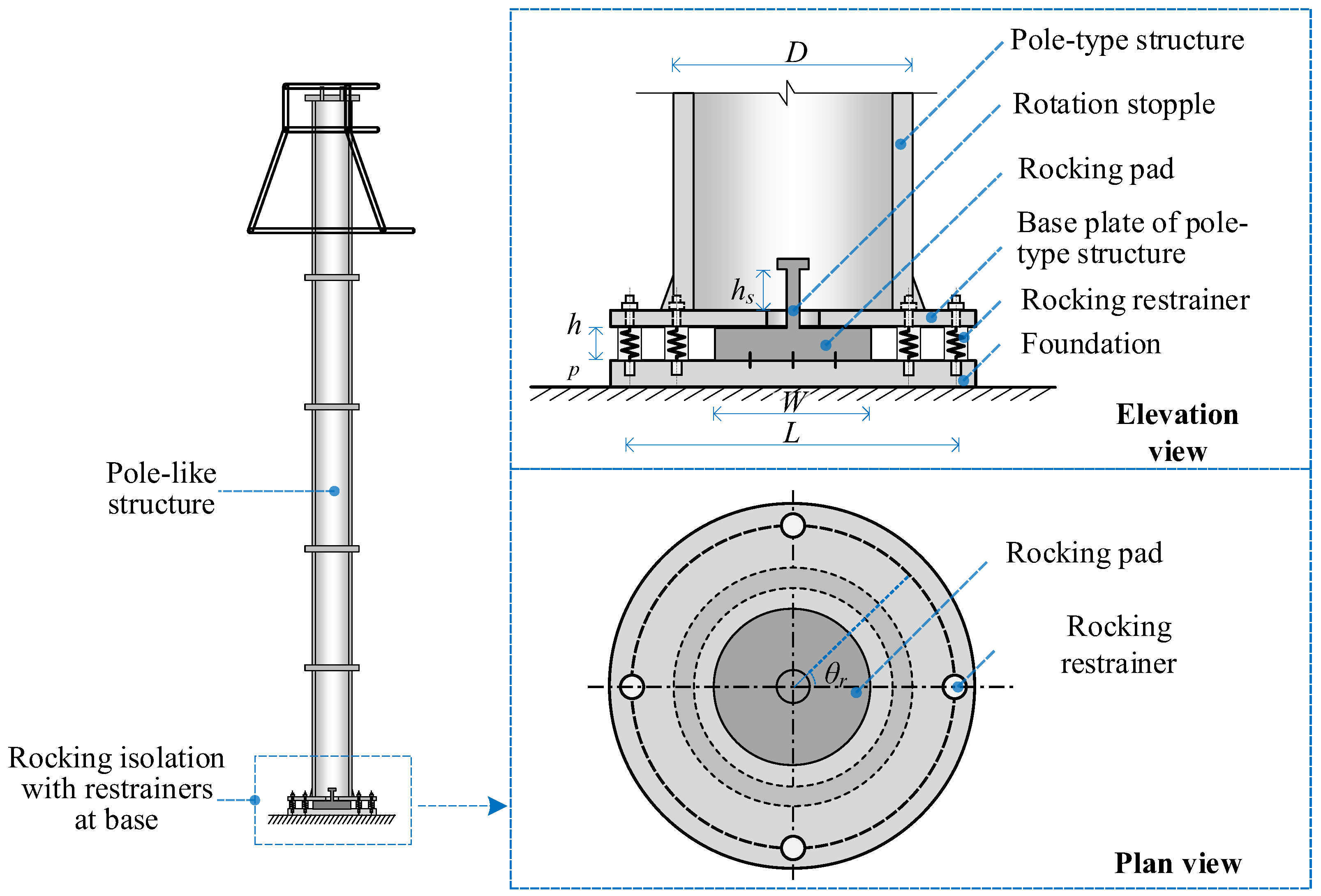
2. Conceptual Development
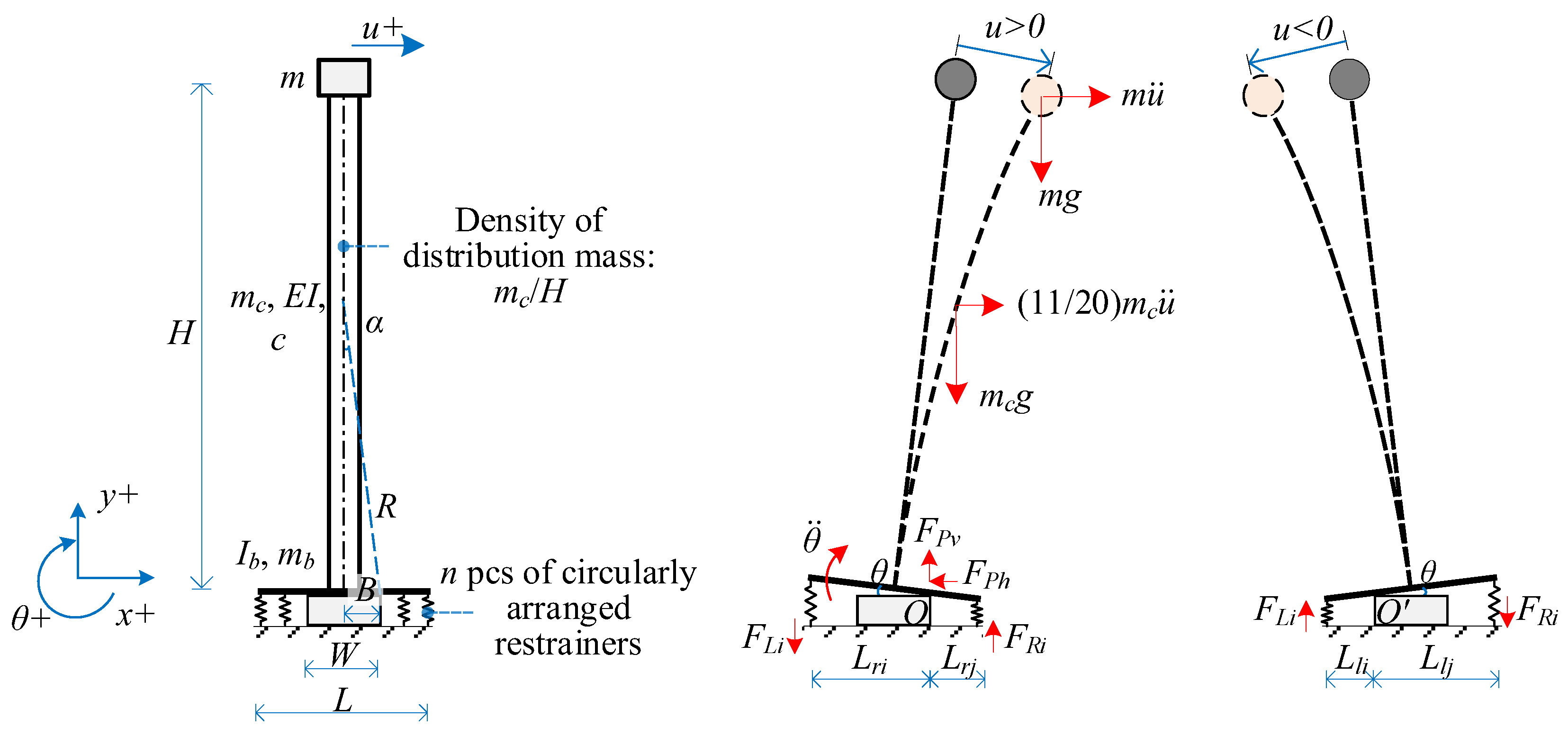
3. Dynamics Modeling
4. Experimental Study
4.1. Testing Specimen, Setup and Schedule
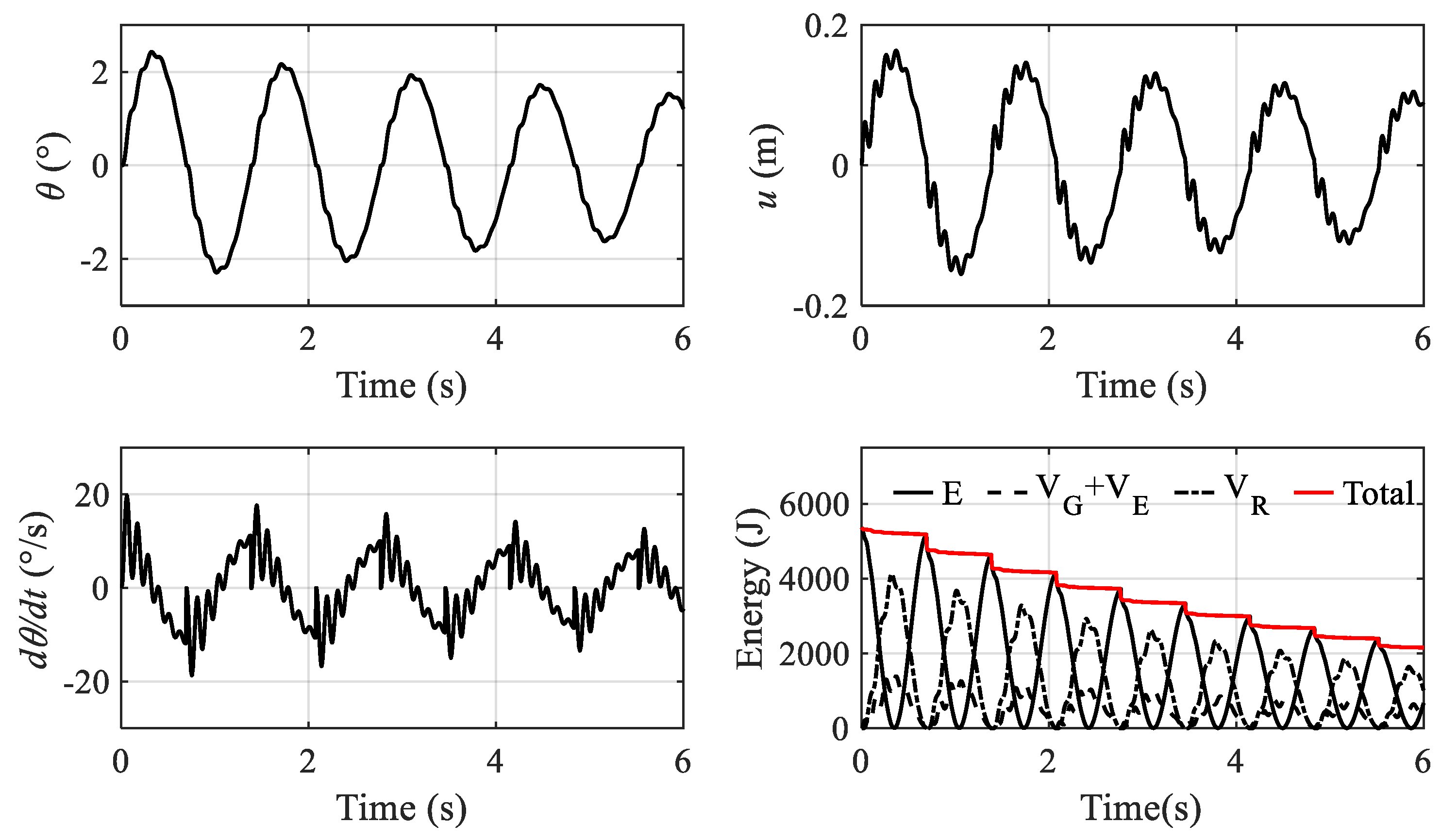
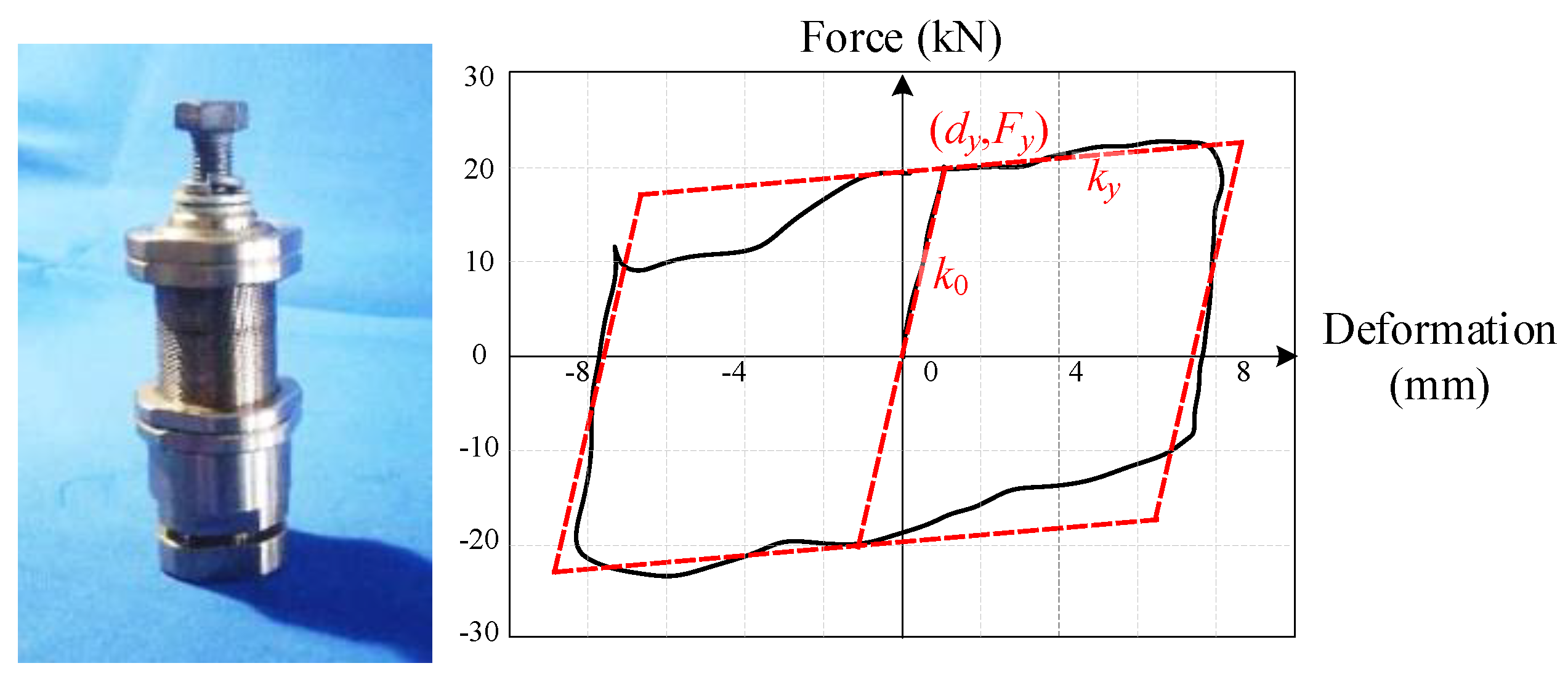
4.2. Testing Results
4.3. Validation of the Restrained Rocking Model
5. Discussion on the Intensity Measure Governing the Response
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Siringoringo, D.M.; Fujino, Y.; Nagasaki, A.; Matsubara, T. Seismic Performance Evaluation of Existing Light Poles on Elevated Highway Bridges. Struct. Infrastruct. Eng. 2021, 17, 649–663. [Google Scholar] [CrossRef]
- Baghmisheh, A.G.; Mahsuli, M. Seismic Performance and Fragility Analysis of Power Distribution Concrete Poles. Soil Dyn. Earthq. Eng. 2021, 150, 106909. [Google Scholar] [CrossRef]
- Ibrahim, A.M.; El Damatty, A.A.; El Ansary, A.M. Finite Element Modelling of Pre-Stressed Concrete Poles under Downbursts and Tornadoes. Eng. Struct. 2017, 153, 370–382. [Google Scholar] [CrossRef]
- Stephens, M.; Xu, Z.; Whittaker, C.; Wotherspoon, L. Vulnerability of Power Distribution Utility Poles to Tsunami Bore Impacts. J. Coast. Hydraul. Struct. 2023, 3. [Google Scholar] [CrossRef]
- Ju, Y.; Zhao, J.; Wang, D.; Song, Y. Experimental Study on Flexural Behaviour of Reinforced Reactive Powder Concrete Pole. Constr. Build. Mater. 2021, 312, 125399. [Google Scholar] [CrossRef]
- Sasaki, T.; Nozawa, S.; Tsukishima, D.; Kaneko, A. Earthquake Damage to Concrete Utility Poles for Shinkansen and Remedial Measure. Concr. J. 2015, 53, 622–628. [Google Scholar] [CrossRef]
- Li, S.; Tsang, H.-H.; Cheng, Y.; Lu, Z. Effects of Sheds and Cemented Joints on Seismic Modelling of Cylindrical Porcelain Electrical Equipment in Substations. Earthq. Struct. 2017, 12, 55–65. [Google Scholar] [CrossRef]
- Xue, Y.; Cheng, Y.; Zhu, Z.; Li, S.; Liu, Z.; Guo, H.; Zhang, S. Study on Seismic Performance of Porcelain Pillar Electrical Equipment Based on Nonlinear Dynamic Theory. Adv. Civ. Eng. 2021, 2021, 8816322. [Google Scholar] [CrossRef]
- Takhirov, S.; Schiff, A.; Kempner, L.; Fujisaki, E. Breaking Strength of Porcelain Insulator Sections Subjected to Cyclic Loading. In TCLEE 2009: Lifeline Earthquake Engineering in a Multihazard Environment; American Society of Civil Engineers: Reston, VA, USA, 2009; pp. 1–12. [Google Scholar]
- He, C.; Xie, Q.; Yang, Z.; Xue, S. Seismic Evaluation and Analysis of 1100-KVUHV Porcelain Transformer Bushings. Soil Dyn. Earthq. Eng. 2019, 123, 498–512. [Google Scholar] [CrossRef]
- Ma, G.L.; Xie, Q.; Whittaker, A.S. Physical and Numerical Simulations of the Seismic Response of a 1,100 KV Power Transformer Bushing. Earthq. Spectra 2018, 34, 1515–1541. [Google Scholar] [CrossRef]
- Li, S.; Tsang, H.-H.; Cheng, Y.; Lu, Z. Considering Seismic Interaction Effects in Designing Steel Supporting Structure for Surge Arrester. J. Constr. Steel Res. 2017, 132, 151–163. [Google Scholar] [CrossRef]
- Li, S.; Cheng, Y.; Lu, Z.; Lam, N.; Xue, Y.; Wang, H. Full-Scale Testing on Seismic Performance of Surge Arrester with Retrofitted Composite Insulators. Buildings 2022, 12, 1720. [Google Scholar] [CrossRef]
- Epackachi, S.; Dolatshahi, K.M.; Oliveto, N.D.; Reinhorn, A.M. Mechanical Behavior of Electrical Hollow Composite Post Insulators: Experimental and Analytical Study. Eng. Struct. 2015, 93, 129–141. [Google Scholar] [CrossRef]
- Moustafa, M.A.; Mosalam, K.M. Structural Performance of Porcelain and Polymer Post Insulators in High Voltage Electrical Switches. J. Perform. Constr. Facil. 2016, 30, 04016002. [Google Scholar] [CrossRef]
- Yu, Y.; Li, G.; Li, P.; Zhu, Q. Investigation and Analysis of Electric Equipment Damage in Sichuan Power Grid Caused by Wenchuan Earthquake. Power Syst. Technol. 2008, 32, T1. [Google Scholar]
- Wang, Z. A Preliminary Report on the Great Wenchuan Earthquake. Earthq. Eng. Eng. Vib. 2008, 7, 225–234. [Google Scholar] [CrossRef]
- Kwasinski, A.; Eidinger, J.; Tang, A.; Tudo-Bornarel, C. Performance of Electric Power Systems in the 2010-2011 Christchurch, New Zealand, Earthquake Sequence. Earthq. Spectra 2014, 30, 205–230. [Google Scholar] [CrossRef]
- Mimura, N.; Yasuhara, K.; Kawagoe, S.; Yokoki, H.; Kazama, S. Damage from the Great East Japan Earthquake and Tsunami—A Quick Report. Mitig. Adapt. Strateg. Glob. Chang. 2011, 16, 803–818. [Google Scholar] [CrossRef]
- Adachi, T.; Ellingwood, B.R. Serviceability of Earthquake-Damaged Water Systems: Effects of Electrical Power Availability and Power Backup Systems on System Vulnerability. Reliab. Eng. Syst. Saf. 2008, 93, 78–88. [Google Scholar] [CrossRef]
- Salman, A.M.; Li, Y. A Probabilistic Framework for Seismic Risk Assessment of Electric Power Systems. Procedia Eng. 2017, 199, 1187–1192. [Google Scholar] [CrossRef]
- Ang, H.S.; Pires, J.A.; Villaverde, R. A Model for the Seismic Reliability Assessment of Electric Power Transmission Systems. Reliab. Eng. Syst. Saf. 1996, 51, 7–22. [Google Scholar] [CrossRef]
- Cheng, K.; Wang, Y.; Fang, H.; Qian, C.; Wu, P. Experimental Investigation and Prediction for Bending Creep of Glass Fiber-Reinforced Polymer Pultruded Tube. Buildings 2023, 13, 2714. [Google Scholar] [CrossRef]
- Li, S.; Tsang, H.-H.; Cheng, Y.; Lu, Z. Seismic Testing and Modeling of Cylindrical Electrical Equipment with GFRP Composite Insulators. Compos. Struct. 2018, 194, 454–467. [Google Scholar] [CrossRef]
- Xiao, J. Achievement of Electrical Technology in Sichuan Wenchuan Earthquake. Electr. Age 2008, 12, 32–34. [Google Scholar]
- Gökçe, T.; Yüksel, E.; Orakdöğen, E. Seismic Performance Enhancement of High-Voltage Post Insulators by a Polyurethane Spring Isolation Device. Bull. Earthq. Eng. 2019, 17, 1739–1762. [Google Scholar] [CrossRef]
- Xie, Q.; Shi, G.; Liu, Y. Influence of Lumped Mass and Rotary Inertia on Seismic Isolated Post Equipment. J. Constr. Steel Res. 2022, 199, 107604. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, S.; Lu, Z.; Liu, Z.; Zhu, Z. Seismic Risk Mitigation of Cylindrical Electrical Equipment with a Novel Isolation Device. Soil Dyn. Earthq. Eng. 2018, 111, 41–52. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, L.; Cheng, Y.; Lu, Z.; Zhu, Z. Seismic Performance Improvement Using Bolt-on Isolators on Interconnected Slender Electrical Equipment. Eng. Struct. 2023, 289, 116238. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, Q.; He, C.; Xue, S. Numerical Investigation of the Seismic Response of a UHV Composite Bypass Switch Retrofitted with Wire Rope Isolators. Earthq. Eng. Eng. Vib. 2021, 20, 275–290. [Google Scholar] [CrossRef]
- Alessandri, S.; Giannini, R.; Paolacci, F.; Malena, M. Seismic Retrofitting of an HV Circuit Breaker Using Base Isolation with Wire Ropes. Part 1: Preliminary Tests and Analyses. Eng. Struct. 2015, 98, 251–262. [Google Scholar] [CrossRef]
- Alessandri, S.; Giannini, R.; Paolacci, F.; Amoretti, M.; Freddo, A. Seismic Retrofitting of an HV Circuit Breaker Using Base Isolation with Wire Ropes. Part 2: Shaking-Table Test Validation. Eng. Struct. 2015, 98, 263–274. [Google Scholar] [CrossRef]
- Housner, G.W. The Behavior of Inverted Pendulum Structures during Earthquakes. Bull. Seismol. Soc. Am. 1963, 53, 403–417. [Google Scholar] [CrossRef]
- Kavvadias, I.E.; Vasiliadis, L.K.; Elenas, A. Seismic Response Parametric Study of Ancient Rocking Columns. Int. J. Archit. Herit. 2017, 11, 791–804. [Google Scholar] [CrossRef]
- Papadopoulos, K.; Vintzileou, E.; Psycharis, I.N. Finite Element Analysis of the Seismic Response of Ancient Columns. Earthq. Eng. Struct. Dyn. 2019, 48, 1432–1450. [Google Scholar] [CrossRef]
- Grigorian, M.; Grigorian, C. An Introduction to the Structural Design of Rocking Wall-Frames with a View to Collapse Prevention, Self-Alignment and Repairability. Struct. Des. Tall Spec. Build. 2016, 25, 93–111. [Google Scholar] [CrossRef]
- Casapulla, C.; Giresini, L.; Lourenço, P.B. Rocking and Kinematic Approaches for Rigid Block Analysis of Masonry Walls: State of the Art and Recent Developments. Buildings 2017, 7, 69. [Google Scholar] [CrossRef]
- Aghagholizadeh, M.; Makris, N. Response Analysis of Yielding Structures Coupled to Rocking Walls with Supplemental Damping. Earthq. Eng. Struct. Dyn. 2021, 50, 2672–2689. [Google Scholar] [CrossRef]
- Xiang, M.; Xiong, F.; Lu, Y.; Ge, Q.; Yan, H.; Ran, M. Structural Displacement Ratios for Seismic Evaluation of Structures on Rocking Shallow Foundations. Buildings 2022, 12, 174. [Google Scholar] [CrossRef]
- Giouvanidis, A.I.; Dong, Y. Seismic Loss and Resilience Assessment of Single-Column Rocking Bridges. Bull. Earthq. Eng. 2020, 18, 4481–4513. [Google Scholar] [CrossRef]
- Piras, S.; Palermo, A.; Saiid Saiidi, M. State-of-the-Art of Posttensioned Rocking Bridge Substructure Systems. J. Bridge Eng. 2022, 27, 03122001. [Google Scholar] [CrossRef]
- Pollino, M.; Bruneau, M. Dynamic Seismic Response of Controlled Rocking Bridge Steel-Truss Piers. Eng. Struct. 2008, 30, 1667–1676. [Google Scholar] [CrossRef]
- Agalianos, A.; Psychari, A.; Vassiliou, M.F.; Stojadinovic, B.; Anastasopoulos, I. Comparative Assessment of Two Rocking Isolation Techniques for a Motorway Overpass Bridge. Front. Built Environ. 2017, 3, 47. [Google Scholar] [CrossRef]
- Thiers-Moggia, R.; Málaga-Chuquitaype, C. Seismic Protection of Rocking Structures with Inerters. Earthq. Eng. Struct. Dyn. 2019, 48, 528–547. [Google Scholar] [CrossRef]
- Li, S.; Tsang, H.-H.; Lam, N. Seismic Protection by Rocking with Superelastic Tendon Restraint. Earthq. Eng. Struct. Dyn. 2022, 51, 1718–1737. [Google Scholar] [CrossRef]
- Dimitrakopoulos, I.; Dejong, M. Seismic Overturning of Damped Rocking Structures. 2011. Available online: https://repository.hkust.edu.hk/ir/Record/1783.1-52590 (accessed on 15 January 2023).
- Pan, X.; Málaga-Chuquitaype, C. Seismic Control of Rocking Structures via External Resonators. Earthq. Eng. Struct. Dyn. 2020, 49, 1180–1196. [Google Scholar] [CrossRef]
- Acikgoz, S.; Ma, Q.; Palermo, A.; DeJong, M.J. Experimental Identification of the Dynamic Characteristics of a Flexible Rocking Structure. J. Earthq. Eng. 2016, 20, 1199–1221. [Google Scholar] [CrossRef]
- Acikgoz, S.; Dejong, M.J. The Interaction of Elasticity and Rocking in Flexible Structures Allowed to Uplift. Earthq. Eng. Struct. Dyn. 2012, 41, 2177–2194. [Google Scholar] [CrossRef]
- Vassiliou, M.F.; Mackie, K.R.; Stojadinović, B. Dynamic Response Analysis of Solitary Flexible Rocking Bodies: Modeling and Behavior under Pulse-like Ground Excitation. Earthq. Eng. Struct. Dyn. 2014, 43, 1463–1481. [Google Scholar] [CrossRef]
- Reggiani Manzo, N.; Vassiliou, M.F. Displacement-Based Analysis and Design of Rocking Structures. Earthq. Eng. Struct. Dyn. 2019, 48, 1613–1629. [Google Scholar] [CrossRef]
- Vassiliou, M.F.; Truniger, R.; Stojadinović, B. An Analytical Model of a Deformable Cantilever Structure Rocking on a Rigid Surface: Development and Verification. Earthq. Eng. Struct. Dyn. 2015, 44, 2775–2794. [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures-Theory and Applications to Earthquake Engineering, 4th ed.; Prentice Hall: Hoboken, NJ, USA, 2004. [Google Scholar]
- Martelli, A.; Forni, M. Seismic Isolation and Other Anti-Seismic Systems Recent Applications in Italy and Worldwide. J. Anti-Seism. Syst. Int. Soc. 2010, 1, 75–123. [Google Scholar]
- D’Amato, M.; Gigliotti, R.; Laguardia, R. Seismic Isolation for Protecting Historical Buildings: A Case Study. Front. Built Environ. 2019, 5, 87. [Google Scholar] [CrossRef]
- Li, S.; Tsang, H.-H.; Lam, N. Seismic Internal Force in Rocking Shear Frame with Superelastic Tendon Restraint. Earthq. Eng. Struct. Dyn. 2023, 52, 2272–2293. [Google Scholar] [CrossRef]
- Morin, D.J. Introduction to Classical Mechanics: With Problems and Solutions; Cambridge University Press: Cambridge, UK, 2008; ISBN 9780521876223. [Google Scholar]
- Acikgoz, S.; DeJong, M.J. Analytical Modelling of Multi-Mass Flexible Rocking Structures. Earthq. Eng. Struct. Dyn. 2016, 45, 2103–2122. [Google Scholar] [CrossRef]
- GB 50260-2013; Code for Seismic Design of Electrical Installations. Ministry of Housing and Urban-Rural Development: Beijing, China, 2013.
- PEER Pacific Earthquake Engineering Research Center. Available online: http://peer.berkeley.edu/products/strong_ground_motion_db.html (accessed on 28 January 2021).
- Lachanas, C.G.; Vamvatsikos, D.; Dimitrakopoulos, E.G. Intensity Measures as Interfacing Variables versus Response Proxies: The Case of Rigid Rocking Blocks. Earthq. Eng. Struct. Dyn. 2023, 52, 1722–1739. [Google Scholar] [CrossRef]
- Bantilas, K.E.; Kavvadias, I.E.; Tyrtaiou, M.; Elenas, A. Hilbert–Huang-Transform-Based Seismic Intensity Measures for Rocking Response Assessment. Appl. Sci. 2023, 13, 1634. [Google Scholar] [CrossRef]
- Bantilas, K.E.; Kavvadias, I.E.; Vasiliadis, L.K.; Elenas, A. Seismic Fragility and Intensity Measure Investigation for Rocking Podium Structures under Synthetic Pulse-like Excitations. Earthq. Eng. Struct. Dyn. 2021, 50, 3441–3459. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Setup | Input Motion | PGA | Direction |
|---|---|---|---|---|
| 1 | Fixed base | White noise | 0.05 g | X direction |
| 2 | Code compatible wave | * 1.4 × 0.15 g | ||
| 3 | White noise | 0.05 g | ||
| 4 | Code compatible wave | 1.4 × 0.20 g | ||
| 5 | White noise | 0.05 g | ||
| 6 | Restrained rocking | Code compatible wave | 1.4 × 0.20 g | |
| 7 | White noise | 0.05 g | ||
| 8 | Code compatible wave | 1.4 × 0.40 g | ||
| 9 | White noise | 0.05 g |
| Pole-type structure | |||||
| Height | 11.2 m | Diameter (outside) | 510 mm | Diameter (inside) | 400 mm |
| Distributive mass | 632 kg/m | Added mass at top | 50 kg | Elastic modulus of porcelain | 110 GPa |
| Allowable stress of porcelain | 36 MPa | Natural Frequency | 1.6 Hz | Equivalent sect. stiffness | 8.5 × 107 N.m2 |
| Damping | 3.5% | ||||
| Design of rocking isolation at base | |||||
| Width of rocking base | 375 mm | Number of restrainers | 10 | Arrangement circle diameter | 770 mm |
| Yielding force of restrainer | 40 kN | Initial stiffness of restrainer | 60 kN/mm | Post yielding stiffness | 0.6 kN/mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Hu, Y.; Lu, Z.; Song, B.; Huang, G. Seismic Isolation of Fragile Pole-Type Structures by Rocking with Base Restraints. Buildings 2024, 14, 1176. https://doi.org/10.3390/buildings14041176
Li S, Hu Y, Lu Z, Song B, Huang G. Seismic Isolation of Fragile Pole-Type Structures by Rocking with Base Restraints. Buildings. 2024; 14(4):1176. https://doi.org/10.3390/buildings14041176
Chicago/Turabian StyleLi, Sheng, Yao Hu, Zhicheng Lu, Bo Song, and Guozhong Huang. 2024. "Seismic Isolation of Fragile Pole-Type Structures by Rocking with Base Restraints" Buildings 14, no. 4: 1176. https://doi.org/10.3390/buildings14041176
APA StyleLi, S., Hu, Y., Lu, Z., Song, B., & Huang, G. (2024). Seismic Isolation of Fragile Pole-Type Structures by Rocking with Base Restraints. Buildings, 14(4), 1176. https://doi.org/10.3390/buildings14041176