
Convolutional Neural Networks in the Inspection of Serrasalmids (Characiformes) Fingerlings
 ,
,  , , ,
, , , 
 , , and
, , and
Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
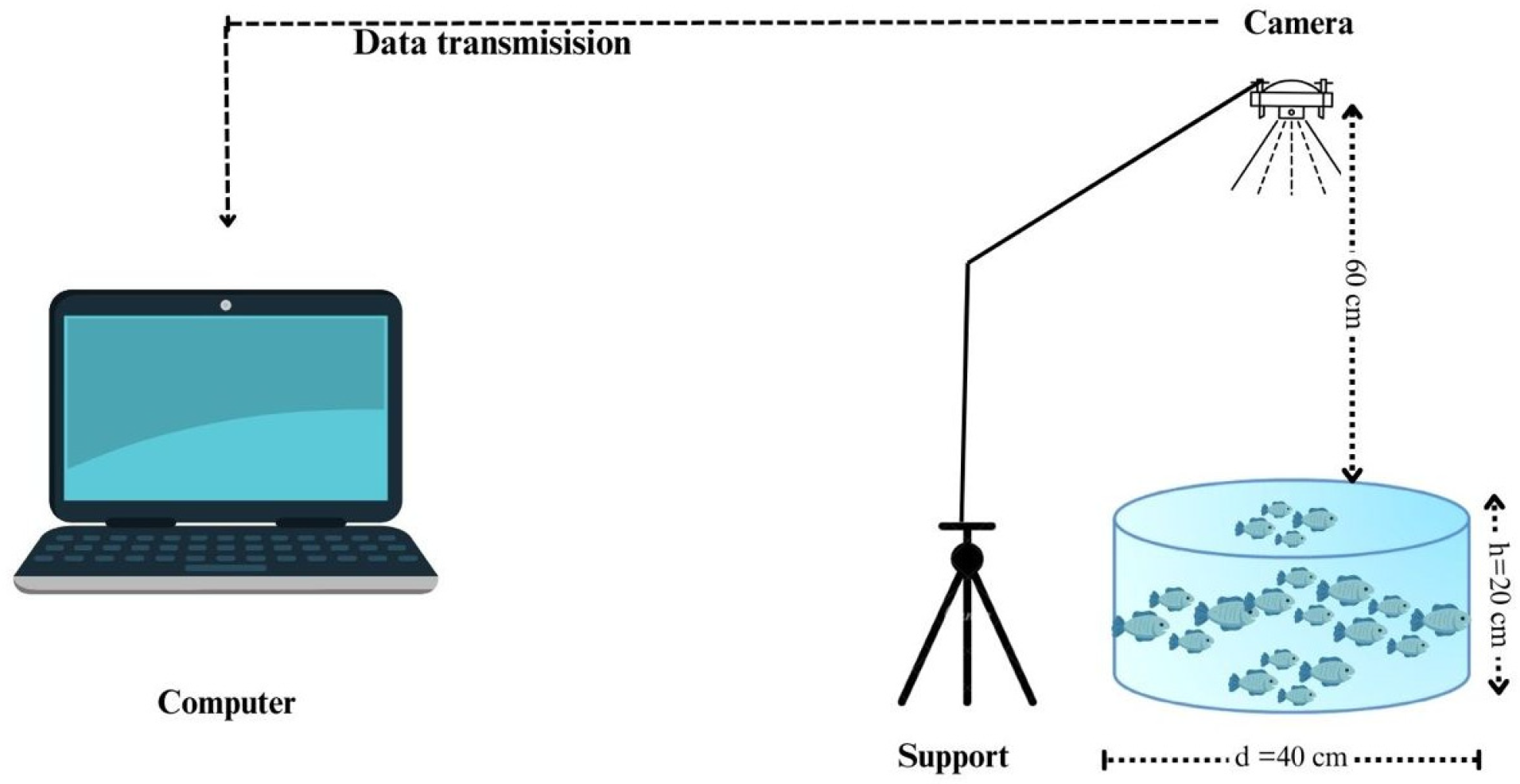
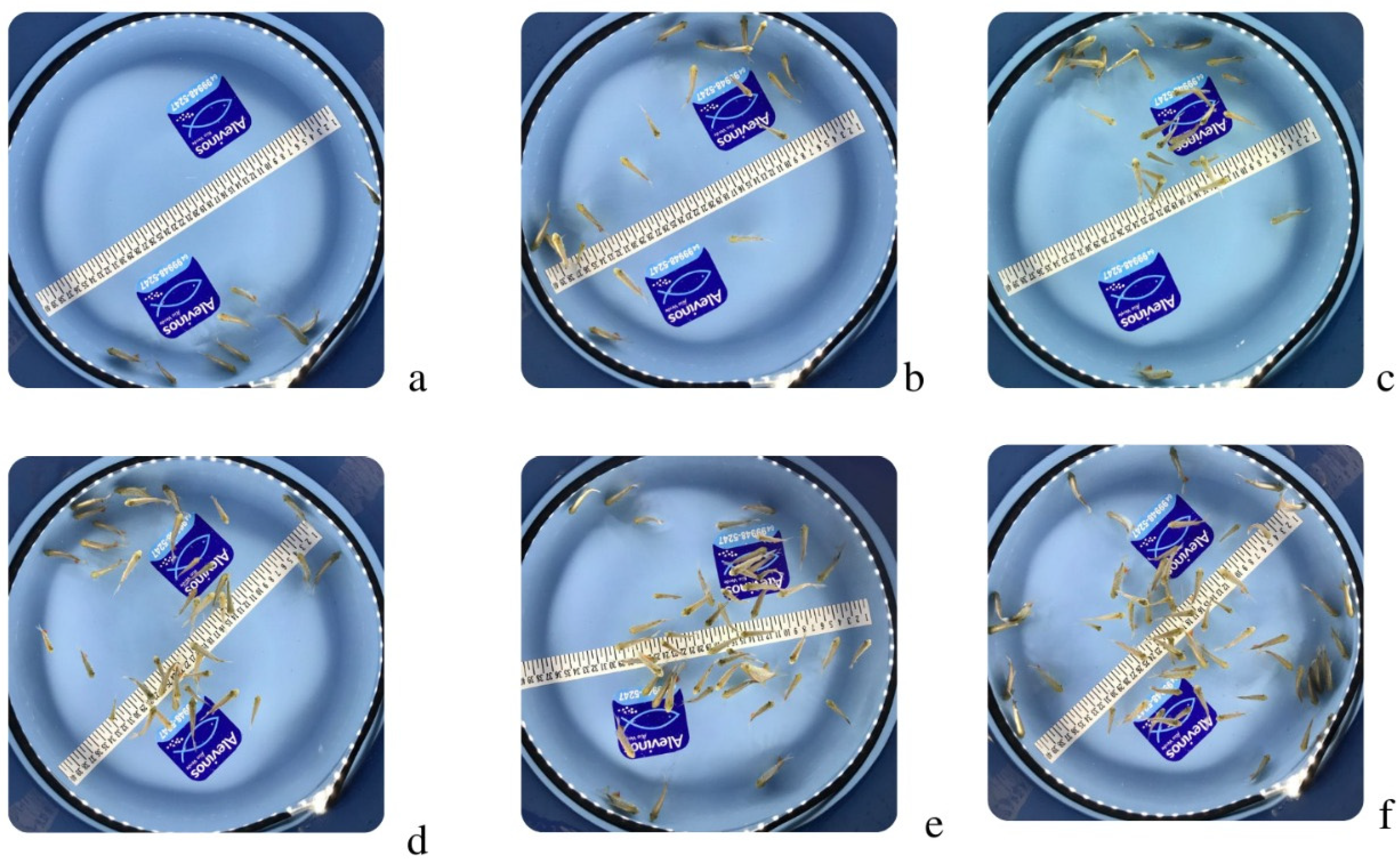
2.1. Database
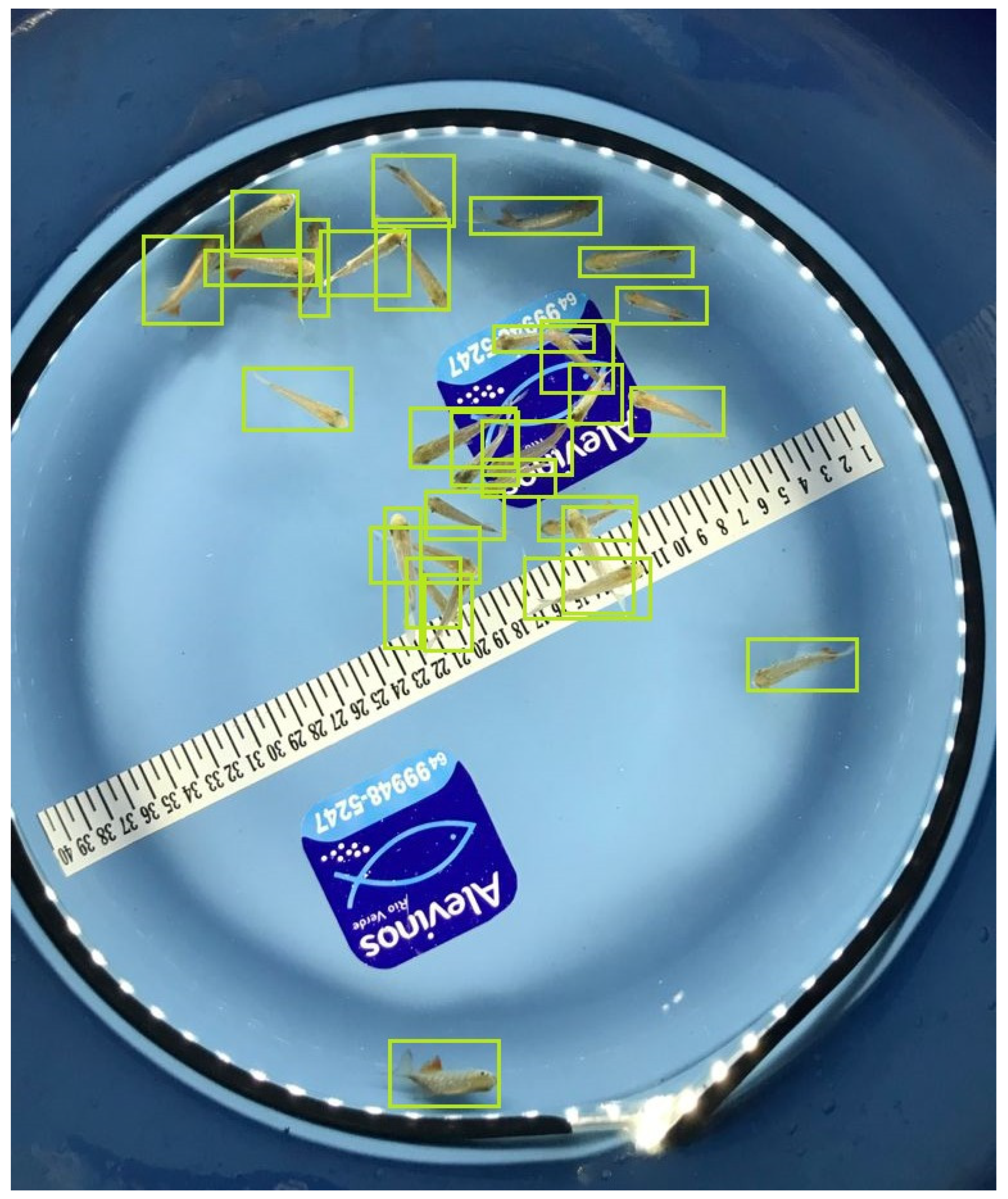
2.2. Pre-Processing and Labeling the Fish
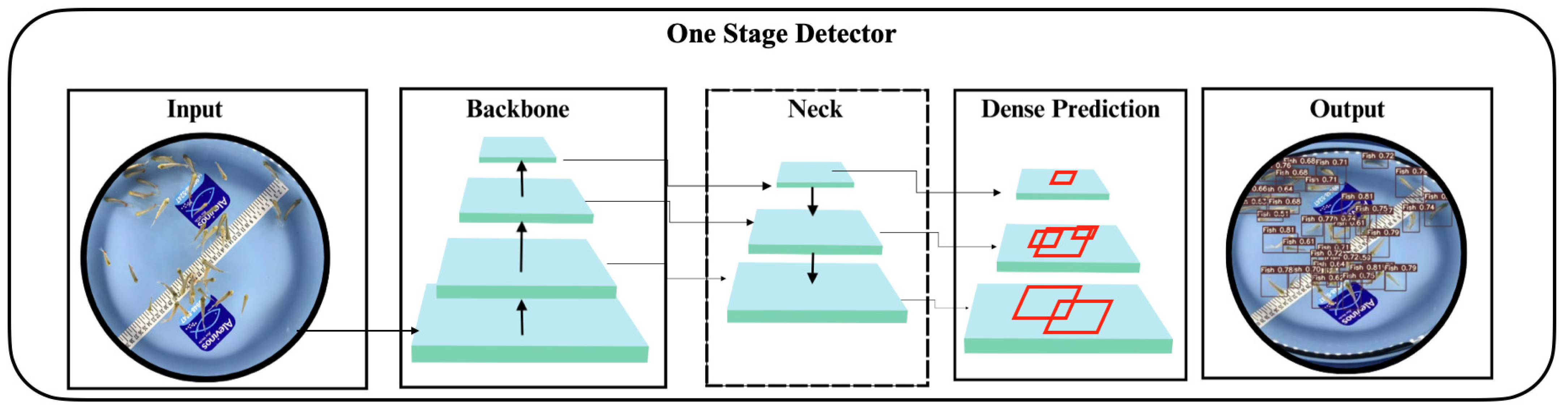
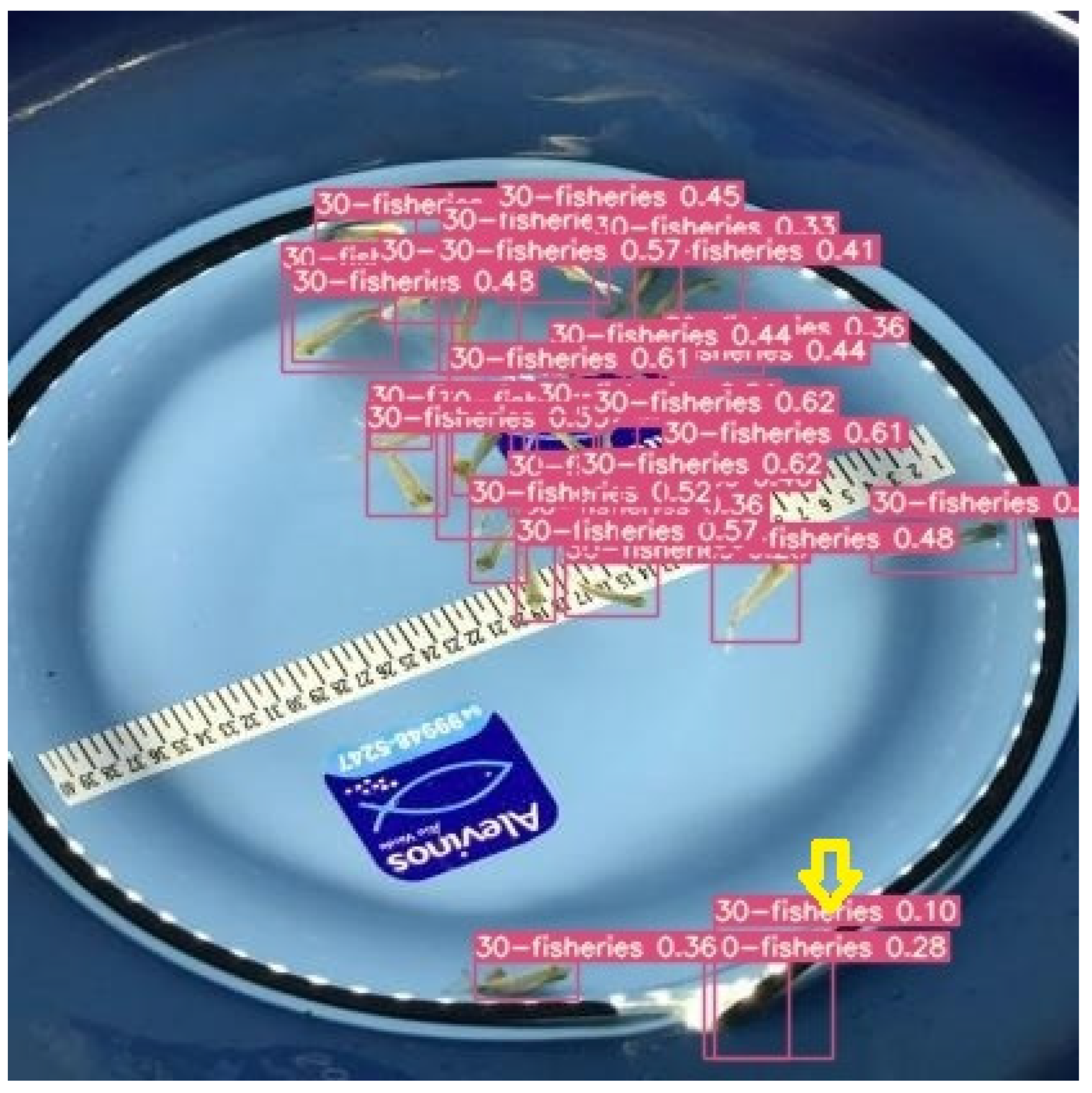
2.3. Fish Detection and Counting
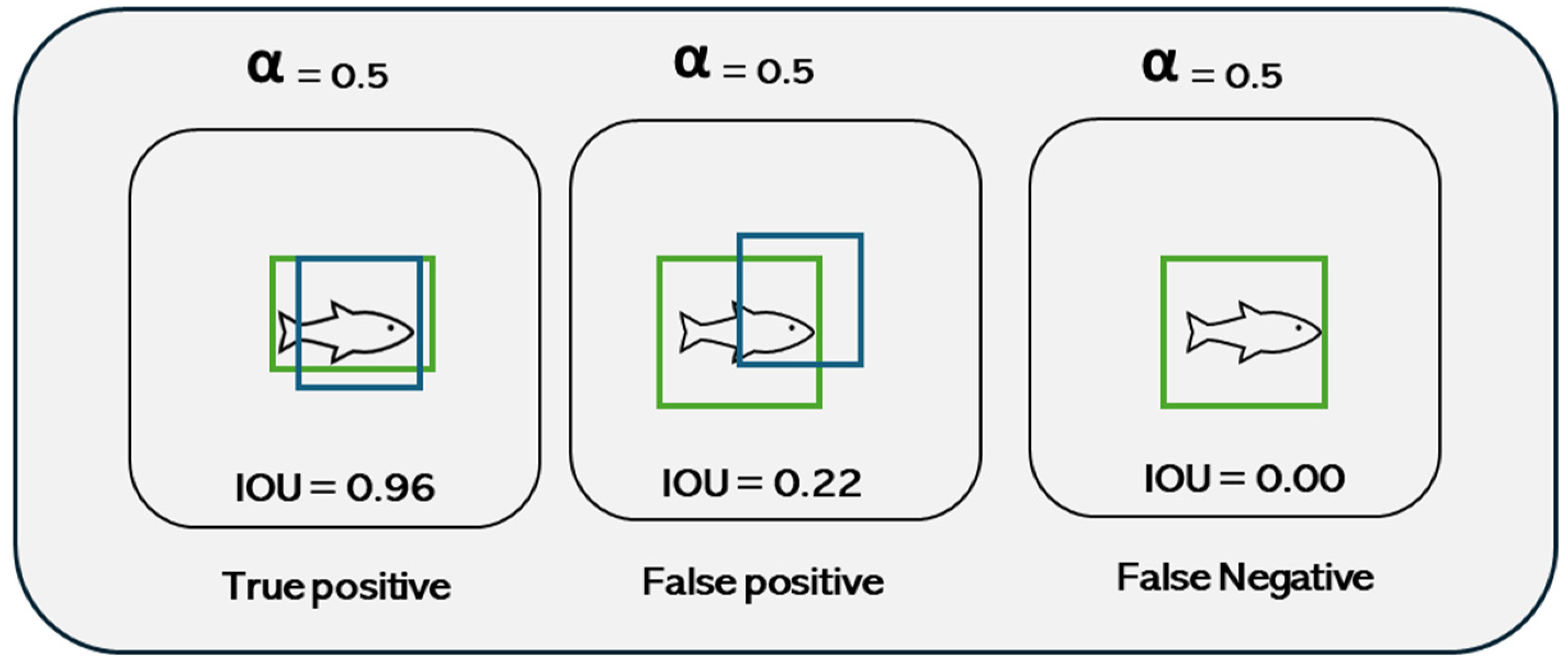
2.4. Evaluation Metrics
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- FAO. The State of World Fisheries and Aquaculture: Towards Blue Transformation; Food and Agriculture Organization of the United Nations: Rome, Italy, 2022. [Google Scholar] [CrossRef]
- Naylor, R.L.; Hardy, R.W.; Buschmann, A.H.; Bush, S.R.; Cao, L.; Klinger, D.H.; Little, D.C.; Lubchenco, J.; Shumway, S.E.; Troell, M. A 20-year retrospective review of global aquaculture. Nature 2021, 591, 551–563. [Google Scholar] [CrossRef]
- Massruhá, S.M.F.S.; Leite, M.A.A.; Luchiari, A., Jr.; Evangelista, S.R.M. A transformação digital no campo rumo à agricultura sustentável e inteligente. In Agricultura Digital: Pesquisa, Desenvolvimento e Inovação nas Cadeias Produtivas, Embrapa; Embrapa Agricultura Digital: Campinas, Brazil, 2020; pp. 21–42. Available online: https://www.alice.cnptia.embrapa.br/bitstream/doc/1126214/1/LV-Agricultura-digital-2020-cap1.pdf (accessed on 6 June 2023).
- Lima, A.F.; Silva, A.P.; Rodrigues, A.P.O.; Bergamin, G.T.; Torati, L.S.; Pedroza Filho, M.X.; Maciel, P.O. Biometria de Peixes: Piscicultura Familiar. 2013. Available online: https://www.embrapa.br/busca-de-publicacoes/-/publicacao/972070/biometria-de-peixes-piscicultura-familiar (accessed on 7 July 2023).
- Yu, C.; Fan, X.; Hu, Z.; Xia, X.; Zhao, Y.; Li, R.; Bai, Y. Segmentation and measurement scheme for fish morphological features based on Mask R-CNN. Inf. Process. Agric. 2020, 7, 523–534. [Google Scholar] [CrossRef]
- Chrispin, C.; Angela, S. ApCNNication of artificial intelligence in fisheries and aquaculture. Biot. Res. Today 2020, 2, 499–502. [Google Scholar]
- Fiorin, D.V.; Martins, F.R.; Shuch, N.J.; Pereira, E.B. ACNNicações de redes neurais e previsões de disponibilidade de recursos energéticos solares. Rev. Bras. Ens. Fís. 2011, 33, 1309–1325. [Google Scholar] [CrossRef]
- Lorena, A.C.; Jacintho, L.F.O.; Siqueira, M.F.; Giovanni, R.; Lohmann, L.G.; Carvalho, A.C.P.L.F.; Yamamoto, M. Comparing machine learning classifiers in potential distribution modelling. Expert Syst. Appl. 2011, 38, 5268–5275. [Google Scholar] [CrossRef]
- Shen, Y.; Zhou, H.; Li, J.; Jian, F.; Jayas, D.S. Detection of stored-grain insects using deep learning. Comput. Electron. Agric. 2018, 145, 319–325. [Google Scholar] [CrossRef]
- Deep, B.V.; Dash, R. Underwater fish species recognition using deep learning techniques. In Proceedings of the 6th International Conference on Signal Processing and Integrated Networks (SPIN), Noida, India, 7–8 March 2019; pp. 665–669. [Google Scholar] [CrossRef]
- Yu, X.; Ma, Y.; Farrington, S.; Reed, J.; Ouyang, B.; Principe, J.C. Fast segmentation for large and sparsely labeled coral images. In Proceedings of the 2019 International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019. [Google Scholar]
- Modasshir, M.; Rekleitis, I. Enhancing Coral Reef Monitoring Utilizing a Deep Semi-Supervised Learning Approach. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1874–1880. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Convolutional Networks. In Deep Learning; MIT Press: Cambridge, UK, 2016; Chapter 9; pp. 326–366. [Google Scholar]
- O’Shea, K.; Nash, R. An introduction to convolutional neural networks. arXiv 2015, arXiv:1511.08458. [Google Scholar] [CrossRef]
- Passos, B.T.O. Mundo do Ponto de Vista das Redes Neurais Convolucionais. Available online: https://ateliware.com/blog/redes-neurais-convolucionais (accessed on 13 July 2023).
- Rocha, W.S.; Doria, C.R.C.; Watanabe, C.Y.V. Fish detection and measurement based on mask R-CNN. In Proceedings of the Conference on Graphics, Patterns and Images (SIBGRAPI), Porto de Galinhas, Brazil, 7–10 November 2020; pp. 183–186. [Google Scholar] [CrossRef]
- Wang, S.H.; Zhao, J.W.; Chen, Y.Q. Robust tracking of fish schools using CNN for head indentification. Multimed. Tools Appl. 2017, 76, 23679–23697. [Google Scholar] [CrossRef]
- Feng, D.; Xie, J.; Liu, T.; Xu, L.; Guo, J.; Hassan, S.G.; Liu, S. Fry Counting Models Based on Attention Mechanism and YOLOv4-Tiny. IEEE Access 2022, 10, 132363–132375. [Google Scholar] [CrossRef]
- Ribeiro, F.M.; Lima, M.; Costa, P.A.T.; Pereira, D.M.; Carvalho, T.A.; Souza, T.V.; Silva, F.F.E.; Costa, A.C. Associations between morphometric variables and weight and yields carcass in pirapitinga Piaractus brachypomus. Aquac. Res. 2019, 50, 2004–2011. [Google Scholar] [CrossRef]
- Costa, A.C.; Balestre, M.; Botelho, H.A.; Freitas, R.T.F.; Gomes, R.C.S.; Campos, S.A.S.; Foresti, F.P.; Hashimoto, D.T.; Martins, D.G.; Prado, F.D.; et al. Imputation of genetic composition for missing pedigree data in Serrasalmidae using morphometric data. Sci. Agric. 2017, 74, 443–449. [Google Scholar] [CrossRef]
- Costa, A.C.; Botelho, H.A.; Gomes, R.C.S.; Sousa, C.S.A.; Reis, N.R.V.; Balestre, M.; Prado, F.D.; Hashimoto, D.T.; Martins, D.G.; Porto, F.F.; et al. General and specific combining ability in Serrasalmidae. Aquac. Res. 2018, 50, 717–724. [Google Scholar] [CrossRef]
- Costa, A.C.; Serafini, M.A.; Reis Neto, R.V.; Santos, P.F.; Marques, L.R.; Rezende, I.R.; Mendonça, M.A.C.; Allaman, I.B.; Freitas, R.T.F. Similarity between Piaractus mesopotamicus, Colossoma macropomum and their interspecific hybrids. Aquaculture 2020, 526, 735397. [Google Scholar] [CrossRef]
- Malcher, D.B.; Guedes, E.B. Classificação inteligente do teste de corte do cacau com redes neurais convolucionais profundas. In Anais do XIII Workshop de Computação Aplicada à Gestão do Meio Ambiente e Recursos Naturais; Sociedade Brasileira de Computação: Porto Alegre, Brazil, 2022; pp. 31–40. [Google Scholar] [CrossRef]
- Vendruscolo, D.G.S.; Drescher, R.; Souza, H.S.; Moura, J.P.V.M.; Mamoré, F.M.D.; Siqueira, T.D.S. Estimativa da altura de eucalipto por meio de regressão não linear e redes neurais artificiais. Rev. Bras. Biom. 2015, 33, 556–569. [Google Scholar]
- Tzutalin. Labelimg Graphical Image Annotation Tool and Label Object Bounding Boxes in Images. 2018. Version 1.8.1. Available online: https://github.com/tzutalin/labelImg.git (accessed on 1 March 2023).
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar] [CrossRef]
- Bhattacharyya, J. Step by Step Guide to Object Detection Using Roboflow. Developers Corner. 2020. Available online: https://analyticsindiamag.com/step-by-step-guide-to-object-detection-using-roboflow/#:~:text=Roboflow%20is%20a%20Computer%20Vision,Roboflow%20accepts%20various%20annotation%20formats (accessed on 2 August 2022).
- Lin, Q.; Ye, G.; Wang, J.; Liu, H. Roboflow: A data-centric workflow management system for developing AI—Enhanced robots. In Proceedings of the 5th Conference on Robot Learnin, London, UK, 8–11 November 2021; Available online: https://proceedings.mlr.press/v164/lin22c/lin22c.pdf (accessed on 11 December 2023).
- Souza, V.; Araújo, L.; Silva, L.; Santos, A. Análise comparativa de redes neurais convolucionais no reconhecimento de cenas. An. Comput. Beach 2020, 11, 419–426. [Google Scholar]
- Kukil. Intersection over Union (IoU) in Object Detection and Segmentation. Learn OpenCV. Available online: https://learnopencv.com/intersection-over-union-iou-in-object-detection-and-segmentation/ (accessed on 26 October 2023).
- Costa, C.S.; Zanoni, V.A.G.; Curvo, L.R.V.; Carvalho, M.A.; Boscolo, W.R.; Signor, A.; Arruda, M.S.; Nucci, H.H.P.; Marcato, J., Jr.; Gonçalves, W.N.; et al. Deep learning apCNNied in fish reproduction for counting larvae in images captured by smartphone. Aquac. Eng. 2022, 97, 102225. [Google Scholar] [CrossRef]
- Buckland, M.; Gey, F. The relationship between recall and precision. J. Am. Soc. Inf. Sci. 1994, 45, 12–19. [Google Scholar] [CrossRef]
- Davis, J.; Goadrich, M. The relationship between precision-recall and ROC curves. In Proceedings of the 23rd International Conference on Machine Learning—ICML, Pittsburgh, PN, USA, 25–29 June 2006. [Google Scholar] [CrossRef]
- Tatbul, N.; Lee, T.J.; Zdonik, S.; Alam, M.; Gottschlich, J. Precision and recall for time series. arXiv 2019, arXiv:1803.03639. [Google Scholar]
- Wangenheim, A. Deep Learning: Detecção de Objetos em Imagens. Universidade Federal de Santa Catarina. 2018. Available online: https://lapix.ufsc.br/ensino/visao/visao-computacionaldeep-learning/deteccao-de-objetos-em-imagens/ (accessed on 11 October 2022).
- Bandyopadhyay, H. Yolo: Real-Time Object Detection exCNNained. 2022. Available online: https://www.v7labs.com/blog/yolo-object-detection#h2 (accessed on 11 October 2022).
- Kasinathan, T.; Singaraju, D.; Uyyala, S.R. Insect classification and detection in field crops using modern machine learning techniques. Inf. Process. Agric. 2020, 8, 446–457. [Google Scholar] [CrossRef]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of- freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Park, J.H.; Kang, C. A study on enhancement of fish recognition using cumulative mean of YOLO network in underwater video images. J. Mar. Sci. Eng. 2020, 8, 952. [Google Scholar] [CrossRef]
- Cai, Y.; Zekai Yao, Z.; Jiang, Z.; Qin, W.; Xiao, J.; Huang, X.; Pan, J.; Feng, H. Rapid detection of fish with SVC symptoms based on machine vision combined with a NAM-YOLO v7 hybrid model. Aquaculture 2024, 582, 740558. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, Y.; Sun, X.; Liu, J.; Yang, X.; Zhou, C. Composited FishNet: Fish Detection and Species Recognition from Low-Quality Underwater Videos. IEEE Trans. Imag. Process. 2021, 30, 4719–4734. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Implementation Details | Parameters |
|---|---|
| Training | r0 = 0.01, lrf = 0.1, momentum = 0.937 weight_decay = 0.0005 box = 0.05, loss_ota = 1 Batch size = 2 Max-epochs = 200 Loss_function = BCE (Binary Cross Entropy) Input_size = 768 × 1024 IOU_thres = 0.45 |
| Environment | CUDA:0 (Tesla T4, 15,102.0625 MB) Platform = Python 3.8 Implementation tools = PyTorch |
| Fish | Accuracy | Precision (%) | Recall (%) | F-Score (%) | ||||
|---|---|---|---|---|---|---|---|---|
| Number | CNN | AUTOML | CNN | AUTOML | CNN | AUTOML | CNN | AUTOML |
| 10 | 99.0 | 86.0 | 100 | 100 | 99.0 | 86.0 | 99.5 | 92.5 |
| 20 | 100 | 79.7 | 100 | 99.5 | 100 | 80.0 | 100 | 89.0 |
| 30 | 99.0 | 61.0 | 99.7 | 100 | 99.4 | 61.0 | 99.5 | 75.8 |
| 40 | 99.3 | 52.0 | 99.8 | 100 | 99.5 | 52.0 | 99.6 | 69.0 |
| 50 | 99.3 | 43.0 | 99.8 | 100 | 99.5 | 43.0 | 99.6 | 60.1 |
| 60 | 99.4 | 59.0 | 100 | 100 | 99.4 | 59.0 | 99.7 | 74.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernandes, M.P.; Costa, A.C.; França, H.F.d.C.; Souza, A.S.; Viadanna, P.H.d.O.; Lima, L.d.C.; Horn, L.D.; Pierozan, M.B.; Rezende, I.R.d.; Medeiros, R.M.d.S.d.; et al. Convolutional Neural Networks in the Inspection of Serrasalmids (Characiformes) Fingerlings. Animals 2024, 14, 606. https://doi.org/10.3390/ani14040606
Fernandes MP, Costa AC, França HFdC, Souza AS, Viadanna PHdO, Lima LdC, Horn LD, Pierozan MB, Rezende IRd, Medeiros RMdSd, et al. Convolutional Neural Networks in the Inspection of Serrasalmids (Characiformes) Fingerlings. Animals. 2024; 14(4):606. https://doi.org/10.3390/ani14040606
Chicago/Turabian StyleFernandes, Marília Parreira, Adriano Carvalho Costa, Heyde Francielle do Carmo França, Alene Santos Souza, Pedro Henrique de Oliveira Viadanna, Lessandro do Carmo Lima, Liege Dauny Horn, Matheus Barp Pierozan, Isabel Rodrigues de Rezende, Rafaella Machado dos S. de Medeiros, and et al. 2024. "Convolutional Neural Networks in the Inspection of Serrasalmids (Characiformes) Fingerlings" Animals 14, no. 4: 606. https://doi.org/10.3390/ani14040606
APA StyleFernandes, M. P., Costa, A. C., França, H. F. d. C., Souza, A. S., Viadanna, P. H. d. O., Lima, L. d. C., Horn, L. D., Pierozan, M. B., Rezende, I. R. d., Medeiros, R. M. d. S. d., Braganholo, B. M., Silva, L. O. P. d., Nacife, J. M., Pinho Costa, K. A. d., Silva, M. A. P. d., & Oliveira, R. F. d. (2024). Convolutional Neural Networks in the Inspection of Serrasalmids (Characiformes) Fingerlings. Animals, 14(4), 606. https://doi.org/10.3390/ani14040606