
The Specific Length of an Underground Tunnel and the Effects of Rock Block Characteristics on the Inflow Rate




Abstract
:1. Introduction
2. Specific Tunnel Length
2.1. Determination of the STL
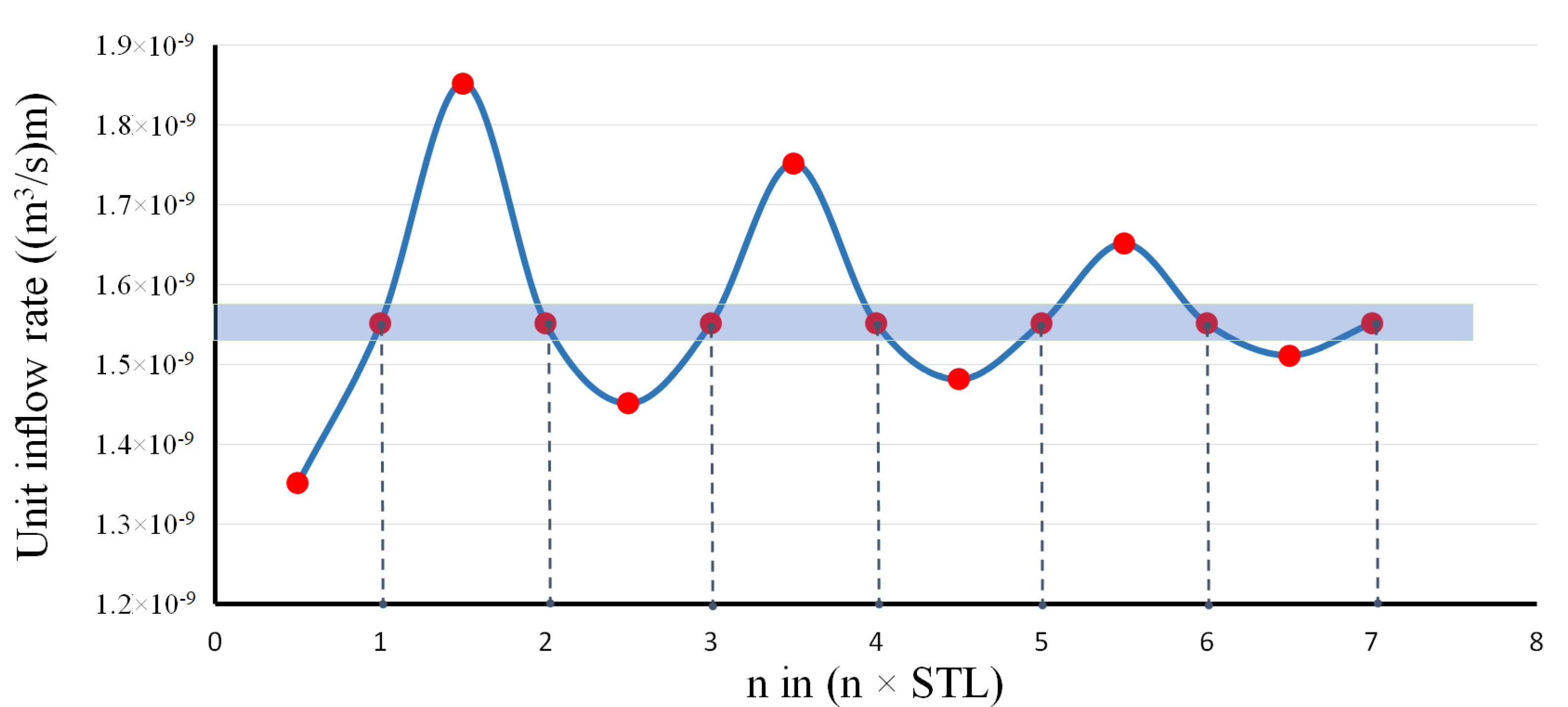
2.2. Validation of the STL
3. Evaluation of the Effects of the Block Characteristics on the Inflow Rate
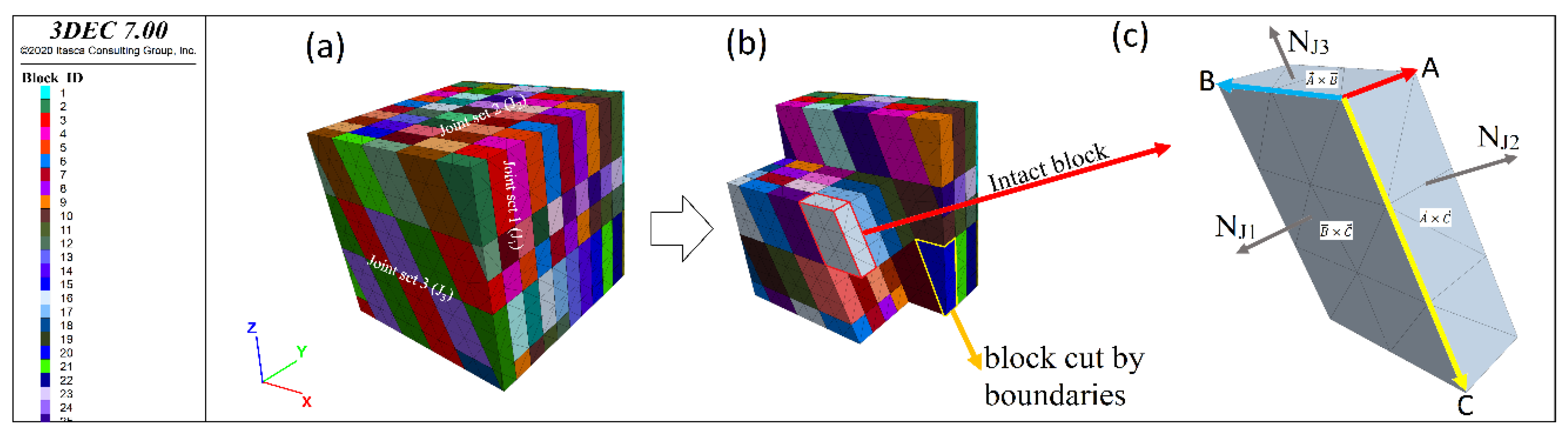
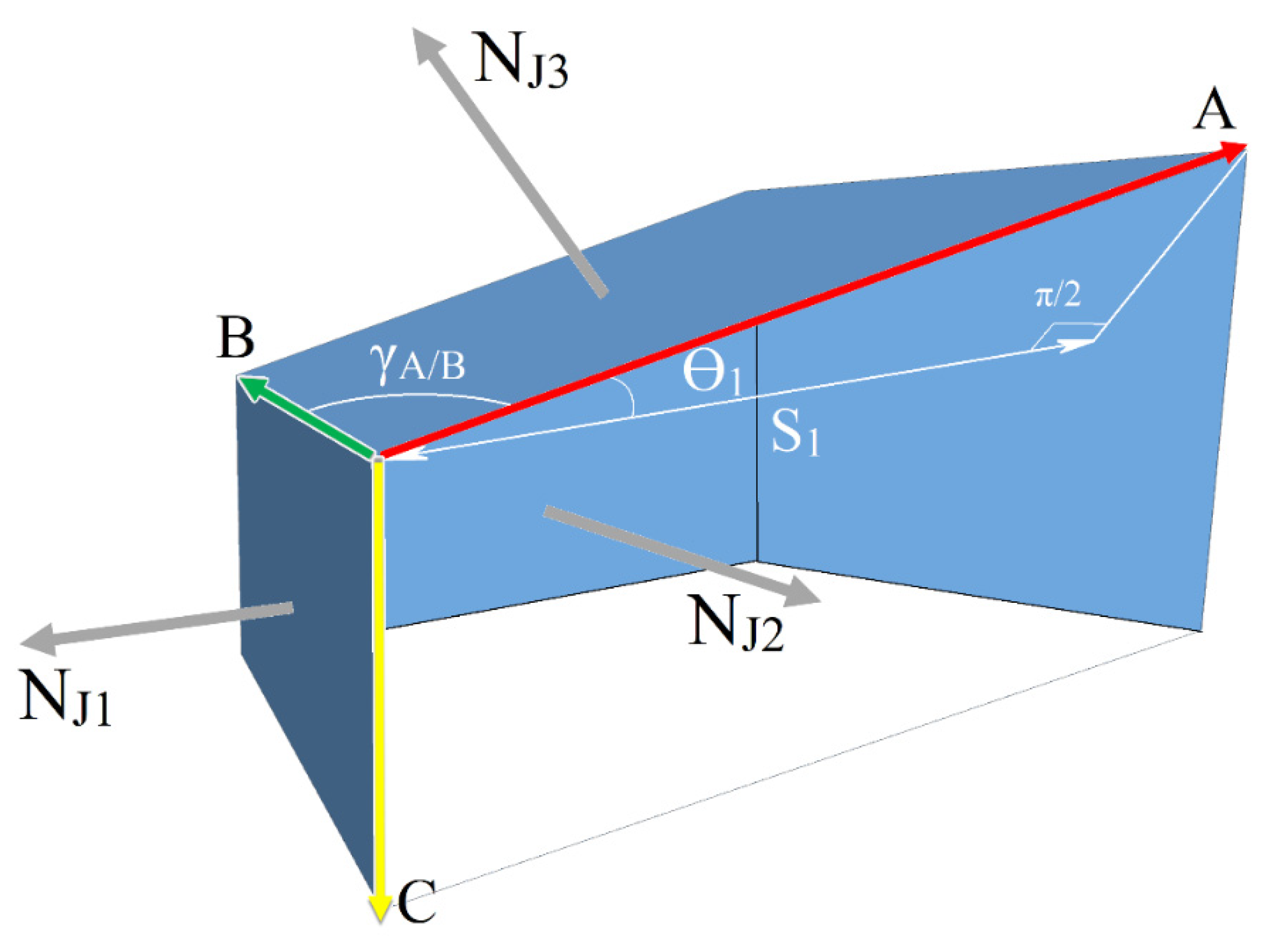
3.1. Analytical Calculation of the Block Volume and Surface Area
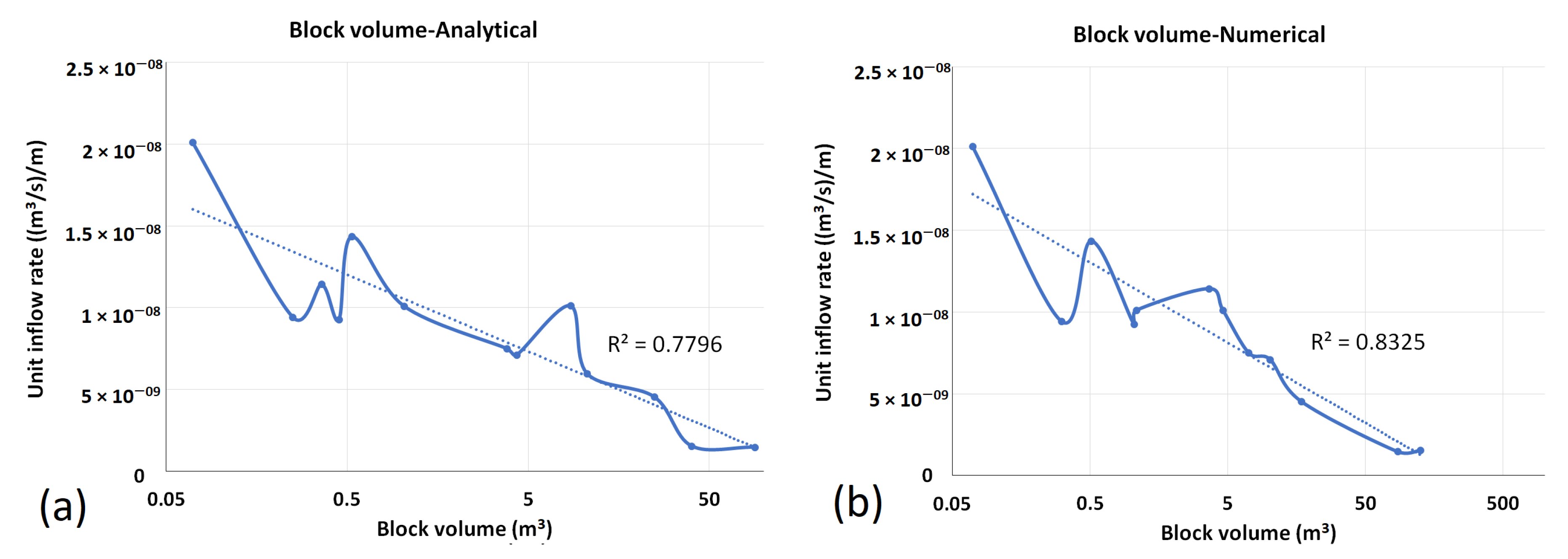
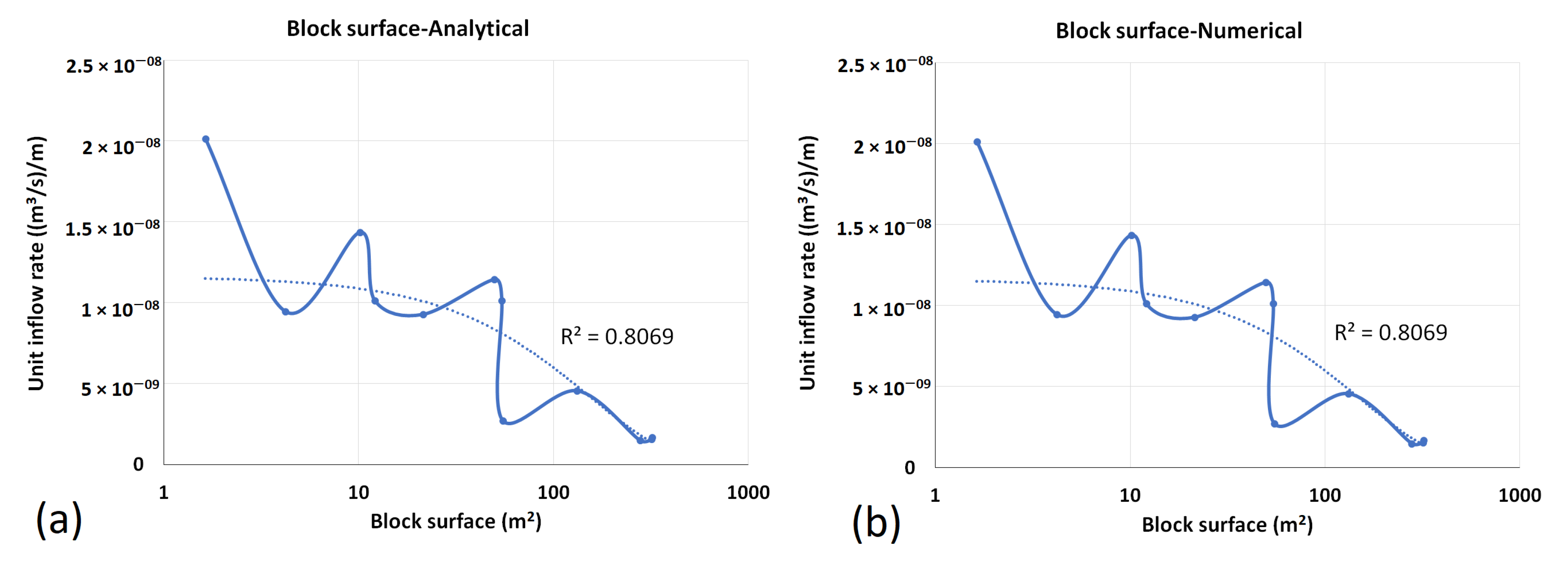
3.2. Validation and Comparison of the Analytical Models
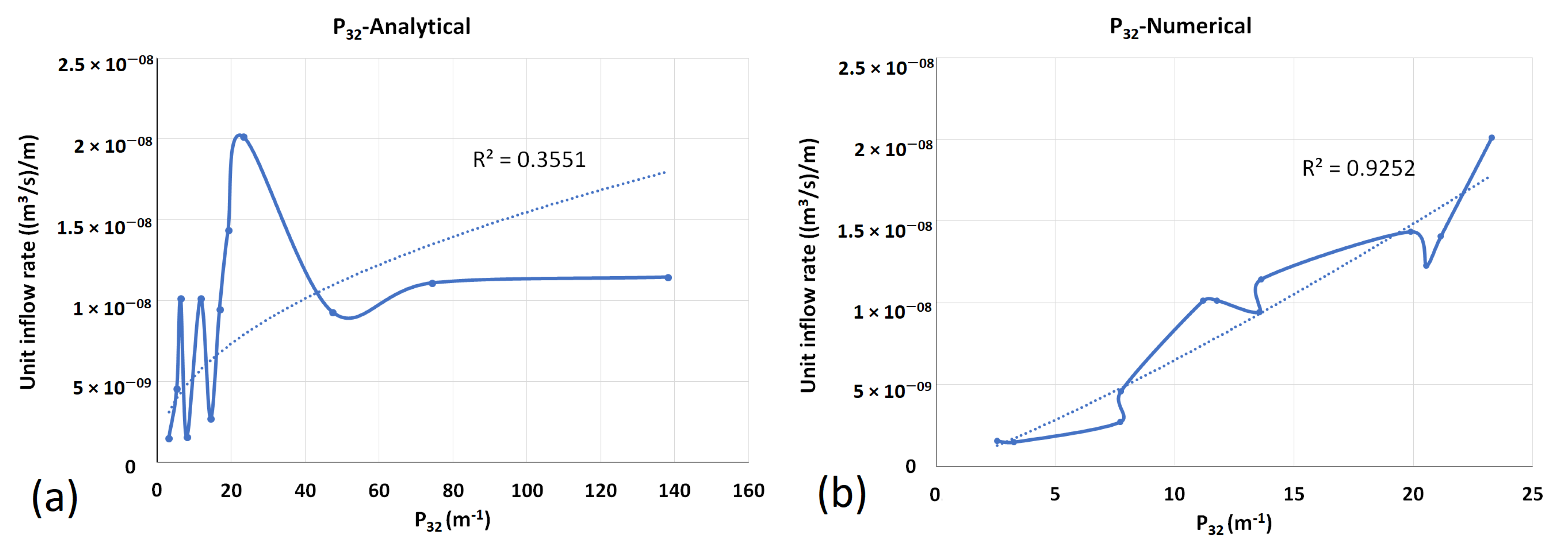
3.3. Evaluation of the Effect of Block Characteristics on the Inflow Rate
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 3DEC | Three-dimensional distinct element code |
| DIP | Dip angle of the joint set |
| DD | Dip direction of the joint set |
| LCM | Least Common Multiple |
| RBL | Representative block of a fractured rock mass |
| RBLS | Surface area of the representative block (m2) |
| RBLV | Volume of the representative block (m3) |
| REV | Representative Elementary Volume (m3) |
| RQD | Rock Quality Designation |
| RMR | Rock Mass Rating |
| GSI | Geological Strength Index |
| P | Plunge of the tunnel direction |
| S | Joint set true spacing (m) |
| Sb | Block surface (m2) |
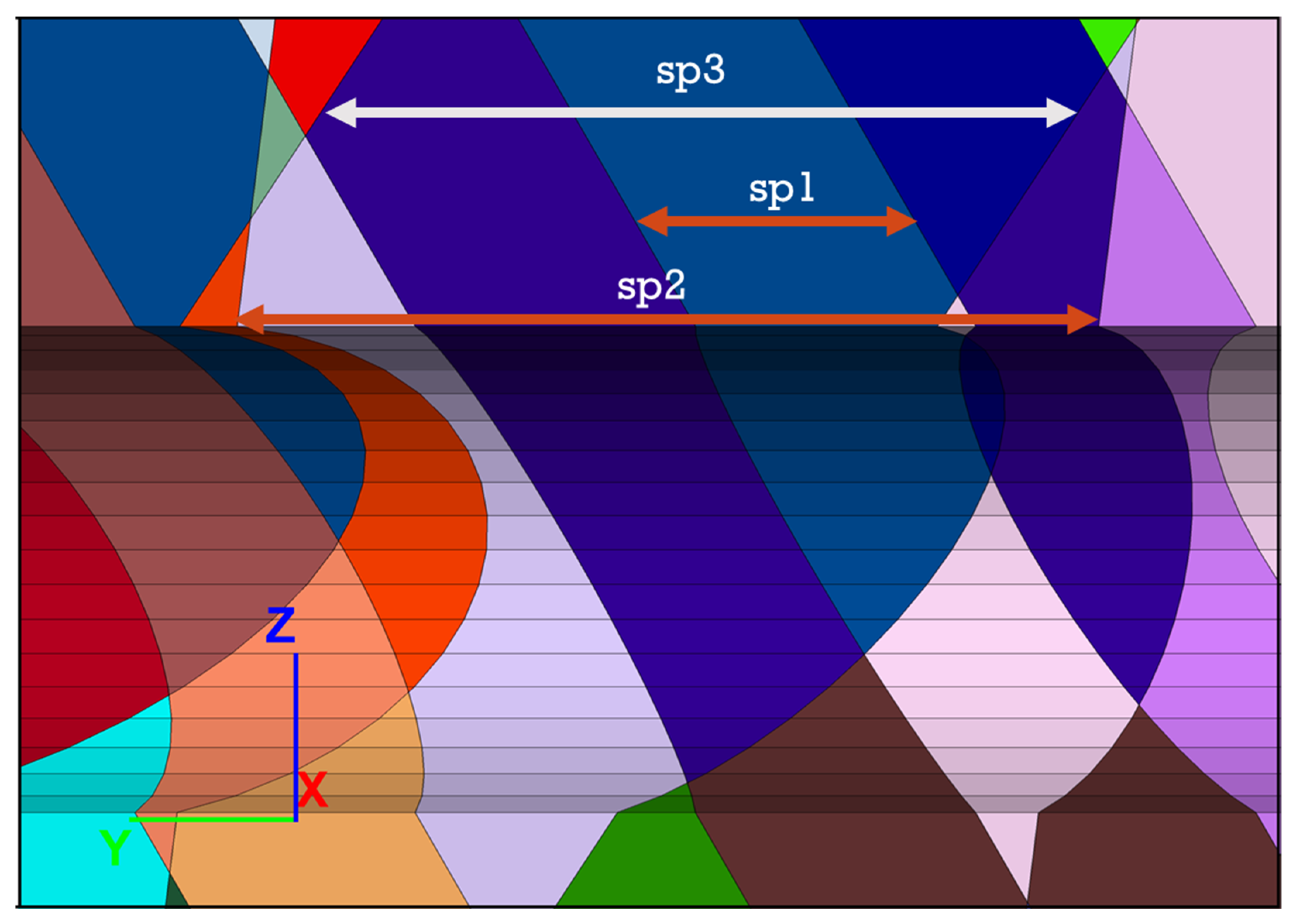
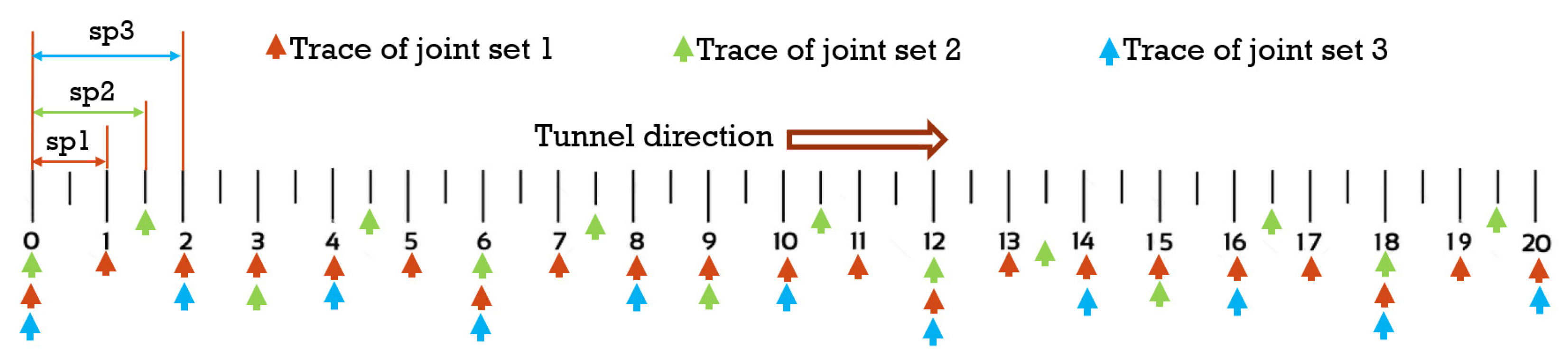
| Spi | Apparent spacing of the joint set i at the wall of the tunnel (m2) |
| P32 | 3D volumetric fracture intensity (m−1) |
| STL | Specific Tunnel Length (m) |
| T | Trend of the tunnel direction |
| Vb | Block volume (m3) |
References
- Liu, Q.; Zhao, Z.; Nie, W.; Sun, J.; Xiao, F. An Analytical Investigation on the Estimation of Water Inflow into a Circular Tunnel Based On-site Data. Rock Mech. Rock Eng. 2020, 53, 3835–3844. [Google Scholar] [CrossRef]
- Nilsen, B.; Palmström, A. Stability and water leakage of hard rock subsea tunnels. In Modern Tunnelling Science and Technology, Proceedings of the International Symposium IS-Kyoto, Kyoto, Japan, 30 October–1 November 2001; CRC Press: Boca Raton, FL, USA, 2001; pp. 497–502. [Google Scholar]
- Tan, Y.; Smith, J.V.; Li, C.-Q.; Currell, M.; Wu, Y. Predicting external water pressure and cracking of a tunnel lining by measuring water inflow rate. Tunn. Undergr. Space Technol. 2018, 71, 115–125. [Google Scholar] [CrossRef]
- Butscher, C. Steady-state groundwater inflow into a circular tunnel. Tunn. Undergr. Space Technol. 2012, 32, 158–167. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, R.-P.; Wu, H.-N.; Liu, Y. Ground settlement induced by tunneling crossing interface of water-bearing mixed ground: A lesson from Changsha, China. Tunn. Undergr. Space Technol. 2020, 96, 103224. [Google Scholar] [CrossRef]
- Saeidi, A.; Deck, O.; Al heib, M.; Verdel, T. Development of a damage simulator for the probabilistic assessment of building vulnerability in subsidence areas. Int. J. Rock Mech. Min. Sci. 2015, 73, 42–53. [Google Scholar] [CrossRef] [Green Version]
- Vanarelli, M.J. A Geostatistical Solution to Estimating Groundwater Inflows in Deep Rock Tunnels with Validation Through Case Studies. Min. Metall. Explor. 2020, 38, 47–357. [Google Scholar] [CrossRef]
- Gattinoni, P.; Scesi, L. An empirical equation for tunnel inflow assessment: Application to sedimentary rock masses. Hydrogeol. J. 2010, 18, 1797–1810. [Google Scholar] [CrossRef]
- Snow, D.T. The frequency and apertures of fractures in rock. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1970, 7, 23–40. [Google Scholar] [CrossRef]
- Fernandez, G.; Moon, J. Excavation-induced hydraulic conductivity reduction around a tunnel—Part 1: Guideline for estimate of ground water inflow rate. Tunn. Undergr. Space Technol. 2010, 25, 560–566. [Google Scholar] [CrossRef]
- Lin, F.; Ren, F.; Luan, H.; Ma, G.; Chen, S. Effectiveness analysis of water-sealing for underground LPG storage. Tunn. Undergr. Space Technol. 2016, 51, 270–290. [Google Scholar] [CrossRef]
- Kayabasi, A.; Yesiloglu-Gultekin, N.; Gokceoglu, C. Use of non-linear prediction tools to assess rock mass permeability using various discontinuity parameters. Eng. Geol. 2015, 185, 1–9. [Google Scholar] [CrossRef]
- Hsu, S.-M.; Hsu, J.-P.; Ke, C.-C.; Lin, Y.-T.; Huang, C.-C. Rock mass permeability classification schemes to facilitate groundwater availability assessment in mountainous areas: A case study in Jhuoshuei river basin of Taiwan. Geosci. J. 2020, 24, 209–224. [Google Scholar] [CrossRef]
- Goodman, R.E.; Moye, D.G.; Van Schalkwyk, A.; Javandel, I. Groundwater Inflow during Tunnel Driving; University of California: Berkeley, CA, USA, 1965. [Google Scholar]
- Zhang, Y.; Zhang, D.; Fang, Q.; Xiong, L.; Yu, L.; Zhou, M. Analytical solutions of non-Darcy seepage of grouted subsea tunnels. Tunn. Undergr. Space Technol. 2020, 96, 103182. [Google Scholar] [CrossRef]
- Shahbazi, A.; Chesnaux, R.; Saeidi, A. A new combined analytical-numerical method for evaluating the inflow rate into a tunnel excavated in a fractured rock mass. Eng. Geol. 2021, 283, 106003. [Google Scholar] [CrossRef]
- Farhadian, H.; Katibeh, H.; Huggenberger, P.; Butscher, C. Optimum model extent for numerical simulation of tunnel inflow in fractured rock. Tunn. Undergr. Space Technol. 2016, 60, 21–29. [Google Scholar] [CrossRef]
- Wang, Z.; Bi, L.; Kwon, S.; Qiao, L.; Li, W. The effects of hydro-mechanical coupling in fractured rock mass on groundwater inflow into underground openings. Tunn. Undergr. Space Technol. 2020, 103, 103489. [Google Scholar] [CrossRef]
- Nikvar Hassani, A.; Farhadian, H.; Katibeh, H. A comparative study on evaluation of steady-state groundwater inflow into a circular shallow tunnel. Tunn. Undergr. Space Technol. 2018, 73, 15–25. [Google Scholar] [CrossRef]
- Saeidi, O.; Stille, H.; Torabi, S.R. Numerical and analytical analyses of the effects of different joint and grout properties on the rock mass groutability. Tunn. Undergr. Space Technol. 2013, 38, 11–25. [Google Scholar] [CrossRef]
- Yu, C.; Deng, S.C.; Li, H.B.; Li, J.C.; Xia, X. The anisotropic seepage analysis of water-sealed underground oil storage caverns. Tunn. Undergr. Space Technol. 2013, 38, 26–37. [Google Scholar] [CrossRef]
- Ivars, D.M. Water inflow into excavations in fractured rock—A three-dimensional hydro-mechanical numerical study. Int. J. Rock Mech. Min. Sci. 2006, 43, 705–725. [Google Scholar] [CrossRef]
- Palmström, A. RMi-A Rock Mass Characterization System for Rock Engineering Purposes; University of Oslo: Oslo, Norway, 1995. [Google Scholar]
- Esmaieli, K.; Hadjigeorgiou, J.; Grenon, M. Estimating geometrical and mechanical REV based on synthetic rock mass models at Brunswick Mine. Int. J. Rock Mech. Min. Sci. 2010, 47, 915–926. [Google Scholar] [CrossRef]
- Wang, M.; Kulatilake, P.H.S.W.; Um, J.; Narvaiz, J. Estimation of REV size and three-dimensional hydraulic conductivity tensor for a fractured rock mass through a single well packer test and discrete fracture fluid flow modeling. Int. J. Rock Mech. Min. Sci. 2002, 39, 887–904. [Google Scholar] [CrossRef]
- Palmström, A. Measurements of and correlations between block size and rock quality designation (RQD). Tunn. Undergr. Space Technol. 2005, 20, 362–377. [Google Scholar] [CrossRef]
- Barton, N. Scale Effects or Sampling Bias? Publikasjon-Norges Geotekniske Institutt: Rotterdam, Netherland, 1990; Volume 182, pp. 31–55.
- Cai, M.; Kaiser, P.K.; Uno, H.; Tasaka, Y.; Minami, M. Estimation of rock mass deformation modulus and strength of jointed hard rock masses using the GSI system. Int. J. Rock Mech. Min. Sci. 2004, 41, 3–19. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
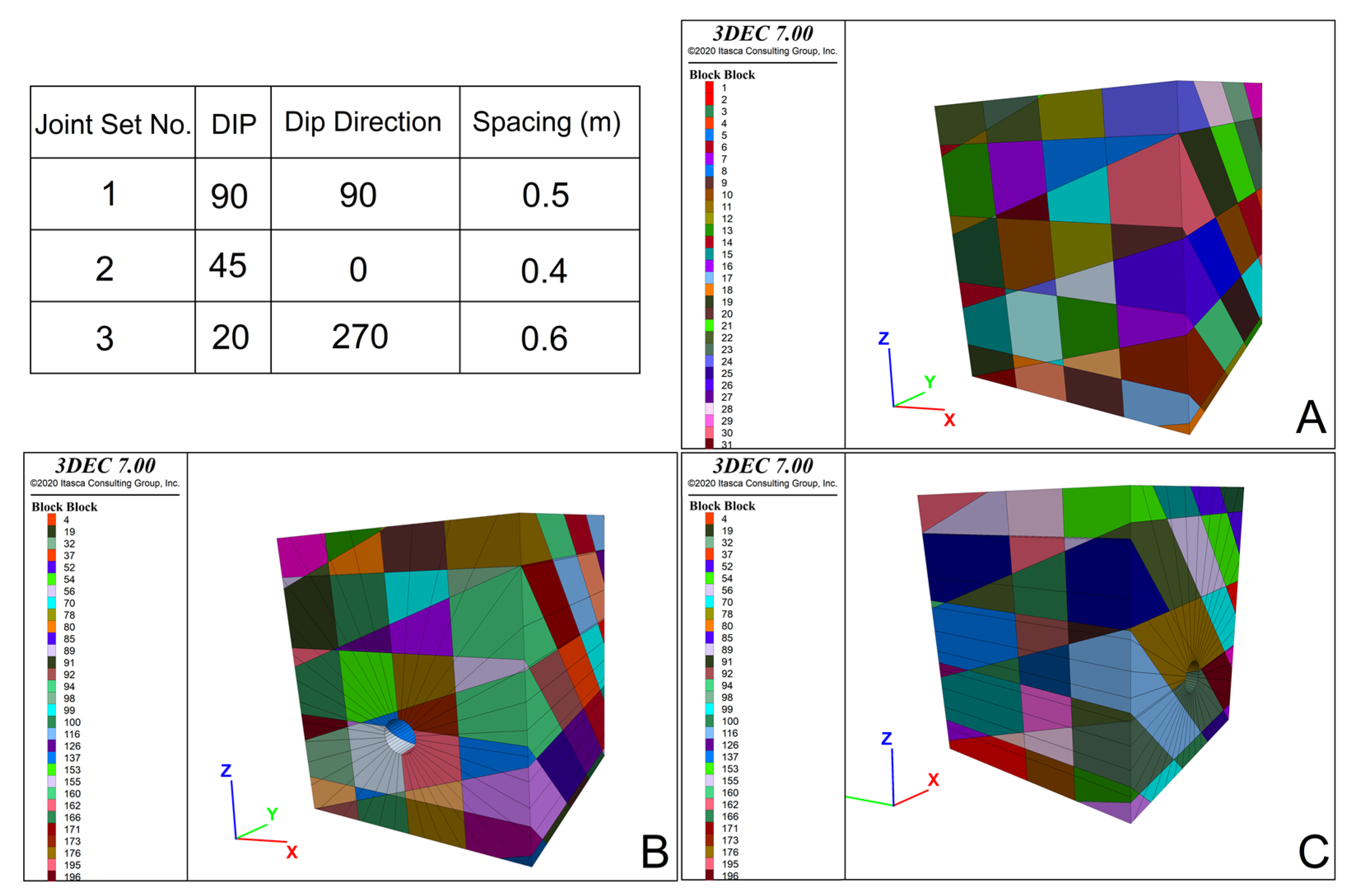
| Joint Set 1 | Joint Set 2 | Joint Set 3 | Tunnel Diameter (m) | Water Head (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case No. | DIP | DD | S (cm) | Ap (cm) | DIP | DD | S (cm) | Ap (cm) | DIP | DD | S (cm) | Ap (cm) | ||
| 1 | 22 | 25 | 205.2 | 1 × 10−4 | 21 | 342 | 205.2 | 1 × 10−4 | 80 | 0 | 9.8 | 1 × 10−4 | 1 | 5 |
| 2 | 81 | 5 | 39.4 | 1 × 10−4 | 73 | 25 | 519.6 | 1 × 10−4 | 82 | 354 | 98.5 | 1 × 10−4 | ||
| 3 | 86 | 9 | 590.9 | 1 × 10−4 | 67 | 340 | 8.7 | 1 × 10−4 | 80 | 0 | 590.9 | 1 × 10−4 | ||
| 4 | 84 | 8 | 590.9 | 1 × 10−4 | 86 | 351 | 590.9 | 1 × 10−4 | 80 | 0 | 590.9 | 1 × 10−4 | ||
| 5 | 61 | 8 | 8.7 | 1 × 10−4 | 21 | 342 | 13.7 | 1 × 10−4 | 80 | 2 | 9.8 | 1 × 10−4 | ||
| Inflow Rate (m3/s) per Meter of Tunnel Length | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Case No. | Sp1 (m) | Sp2 (m) | Sp3 (m) | STL (m) | 0.5 STL | 1.0 STL | 1.5 STL | 2.0 STL | 3.0 STL |
| 1 | 6 | 6 | 0.1 | 6 | 2.15 × 10−8 | 9.35 × 10−10 | 1.02 × 10−8 | 9.35 × 10−10 | 9.35 × 10−10 |
| 2 | 0.4 | 6 | 1 | 6 | 7.15 × 10−10 | 3.58 × 10−10 | 9.41 × 10−10 | 3.58 × 10−10 | 3.58 × 10−10 |
| 3 | 6 | 0.1 | 6 | 6 | 1.28 × 10−8 | 1.51 × 10−8 | 1.36 × 10−8 | 1.51 × 10−8 | 1.52 × 10−8 |
| 4 | 6 | 6 | 6 | 6 | 5.96 × 10−10 | 8.98 × 10−10 | 1.50 × 10−9 | 8.98 × 10−10 | 8.98 × 10−10 |
| 5 | 0.1 | 0.4 | 0.1 | 0.4 | 7.15 × 10−10 | 8.28 × 10−10 | 5.96 × 10−9 | 8.28 × 10−10 | 5.96 × 10−10 |
| Joint Set 1 | Joint Set 2 | Joint Set 3 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Case | DIP | DD | Spacing (m) | Ap (m) | DIP | DD | Spacing (m) | Ap (m) | DIP | DD | Spacing (m) | Ap (m) |
| 1 | 23 | 30 | 0.34 | 2 × 10−5 | 20 | 10 | 2.05 | 5 × 10−7 | 27 | 320 | 0.14 | 2 × 10−5 |
| 2 | 90 | 350 | 0.39 | 2 × 10−5 | 20 | 352 | 0.14 | 2 × 10−5 | 90 | 10 | 0.39 | 5 × 10−6 |
| 3 | 73 | 25 | 0.35 | 5 × 10−6 | 61 | 352 | 0.35 | 2 × 10−5 | 84 | 8 | 5.91 | 5 × 10−6 |
| 4 | 22 | 25 | 0.34 | 5 × 10−7 | 90 | 350 | 0.98 | 2 × 10−5 | 60 | 0 | 0.35 | 2 × 10−5 |
| 5 | 90 | 350 | 0.39 | 5 × 10−6 | 90 | 10 | 0.39 | 5 × 10−7 | 32 | 50 | 2.05 | 2 × 10−5 |
| 6 | 90 | 350 | 5.91 | 5 × 10−7 | 90 | 70 | 0.14 | 5 × 10−6 | 90 | 30 | 5.2 | 5 × 10−6 |
| 7 | 20 | 350 | 0.34 | 2 × 10−5 | 22 | 25 | 1.37 | 2 × 10−5 | 61 | 354 | 5.2 | 5 × 10−6 |
| 8 | 54 | 65 | 0.34 | 2 × 10−5 | 90 | 350 | 0.98 | 5 × 10−6 | 90 | 30 | 0.35 | 5 × 10−6 |
| 9 | 80 | 0 | 5.91 | 5 × 10−6 | 90 | 70 | 0.14 | 5 × 10−7 | 66 | 292 | 0.34 | 5 × 10−6 |
| 10 | 60 | 0 | 3.46 | 2 × 10−5 | 67 | 340 | 5.2 | 5 × 10−6 | 90 | 30 | 0.87 | 5 × 10−6 |
| 11 | 90 | 30 | 3.46 | 5 × 10−6 | 54 | 295 | 1.37 | 5 × 10−6 | 80 | 0 | 3.94 | 5 × 10−7 |
| 12 | 90 | 70 | 0.34 | 2 × 10−5 | 43 | 300 | 1.37 | 5 × 10−7 | 73 | 25 | 5.2 | 5 × 10−7 |
| 13 | 43 | 60 | 0.14 | 5 × 10−7 | 73 | 335 | 5.2 | 5 × 10−7 | 90 | 10 | 0.39 | 2 × 10−5 |
| Block Surface (RBLS) (m2) | Block Volume (RBLV) (m3) | |||
|---|---|---|---|---|
| Case | Analytical (This Study) | Numerical (3DEC) | Analytical [23] | Numerical (3DEC) |
| 1 | 320.2 | 320.2 | 4.31 | 15.14 |
| 2 | 1.63 | 1.63 | 0.07 | 0.07 |
| 3 | 54.15 | 54.16 | 8.55 | 4.6 |
| 4 | 49.73 | 49.71 | 0.36 | 3.65 |
| 5 | 12.08 | 12.07 | 1.03 | 1.08 |
| 6 | N/A | N/A | 10.57 | N/A |
| 7 | 131.54 | 131.53 | 24.90 | 17.02 |
| 8 | 4.21 | 4.20 | 0.25 | 0.31 |
| 9 | 21.35 | 21.35 | 0.45 | 1.04 |
| 10 | 278.38 | 278.39 | 89.33 | 85.36 |
| 11 | 317.93 | 318.04 | 39.91 | 124.94 |
| 12 | 54.75 | 54.75 | 3.80 | 7.09 |
| 13 | 10.15 | 10.14 | 0.53 | 0.51 |
| Case No. | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Water head (m) | 40 | 10 | 10 | 10 | 40 | 100 | 10 | 40 | 40 | 40 | 40 | 100 | 10 |
| Tunnel radius (m) | 4 | 1 | 4 | 4 | 2 | 4 | 1 | 2 | 4 | 1 | 1 | 4 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahbazi, A.; Saeidi, A.; Chesnaux, R.; Rouleau, A. The Specific Length of an Underground Tunnel and the Effects of Rock Block Characteristics on the Inflow Rate. Geosciences 2021, 11, 517. https://doi.org/10.3390/geosciences11120517
Shahbazi A, Saeidi A, Chesnaux R, Rouleau A. The Specific Length of an Underground Tunnel and the Effects of Rock Block Characteristics on the Inflow Rate. Geosciences. 2021; 11(12):517. https://doi.org/10.3390/geosciences11120517
Chicago/Turabian StyleShahbazi, Alireza, Ali Saeidi, Romain Chesnaux, and Alain Rouleau. 2021. "The Specific Length of an Underground Tunnel and the Effects of Rock Block Characteristics on the Inflow Rate" Geosciences 11, no. 12: 517. https://doi.org/10.3390/geosciences11120517
APA StyleShahbazi, A., Saeidi, A., Chesnaux, R., & Rouleau, A. (2021). The Specific Length of an Underground Tunnel and the Effects of Rock Block Characteristics on the Inflow Rate. Geosciences, 11(12), 517. https://doi.org/10.3390/geosciences11120517