Identification of Micro-Scale Landforms of Landslides Using Precise Digital Elevation Models


 , , and
, , and
Abstract
:1. Introduction
Applications of Remote Sensing Technologies in Multiscale Surveys of Small Landslides
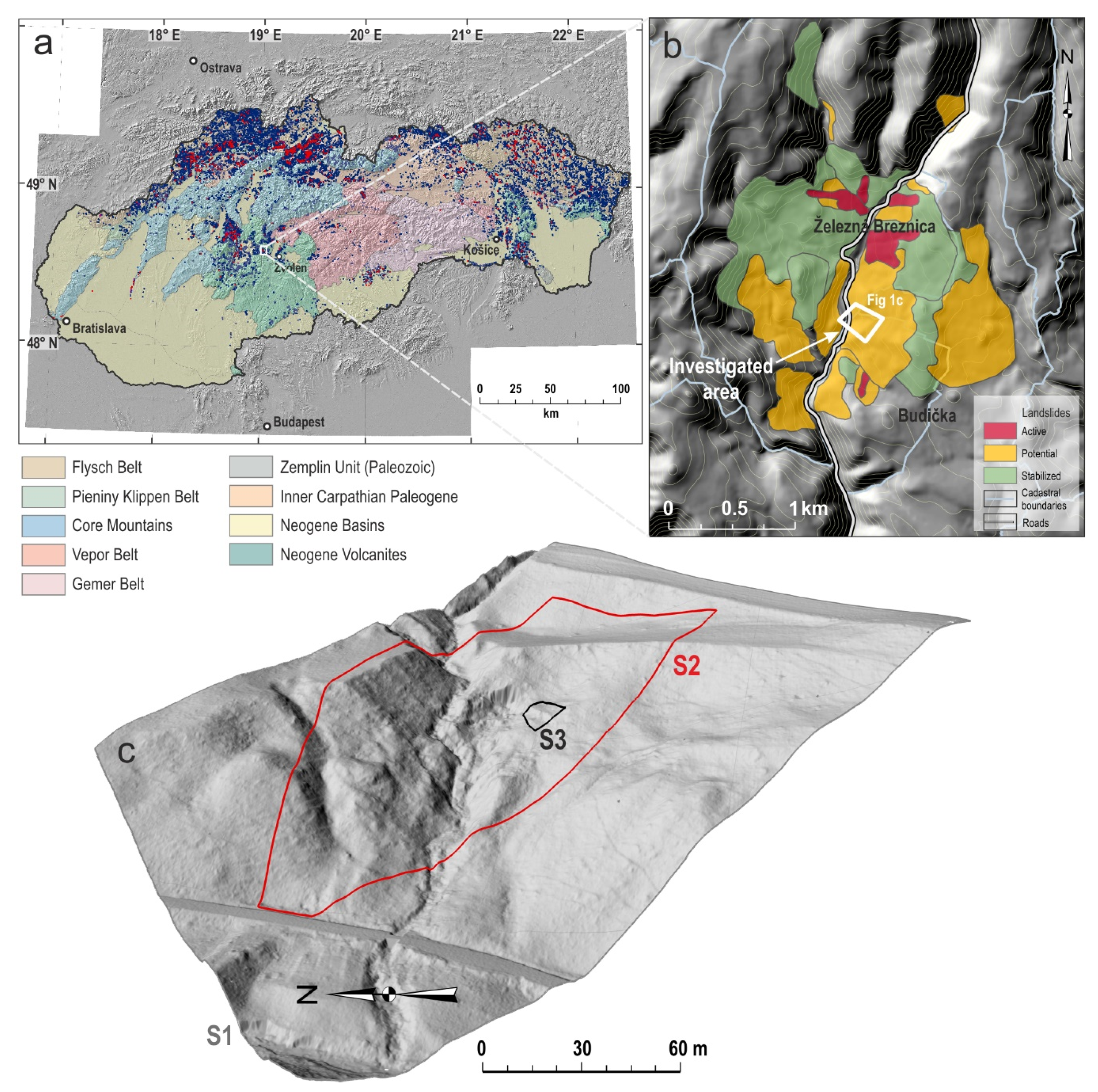
2. Study Area
3. Materials and Methods
- Landslides are traditionally delineated by the visual interpretation of aerial photographs and field surveys [30]. However, this survey brings a lot of subjectivity and it is time-consuming and expensive in terms of data and workload [31]. Small landslide features can be extracted from the surface models created from the airborne LiDAR data [4].
- Terrain topography is assumed to be a useful indicator of a slope movement. The characterization of terrain topography is essential to detect landforms changes caused by a landslide activity. One way to distinguish different landforms is to describe the surface roughness of areas. This parameter refers to the variability in elevation within a defined radius, and therefore it is very sensitive to the selected scale [32]. The surface roughness is considered to be an important indicator to measure the target topographic features of landslides [4]. Surface roughness is one of the best indicators to differentiate between stable and active landslide areas [33]. However, calculation of the maximum curvature (kmax) can be a more sensitive and efficient method to recognize, extract, and delineate particular discrete landslide features that indicate their activity from high-resolution DEMs with sub-meter cell accuracy.
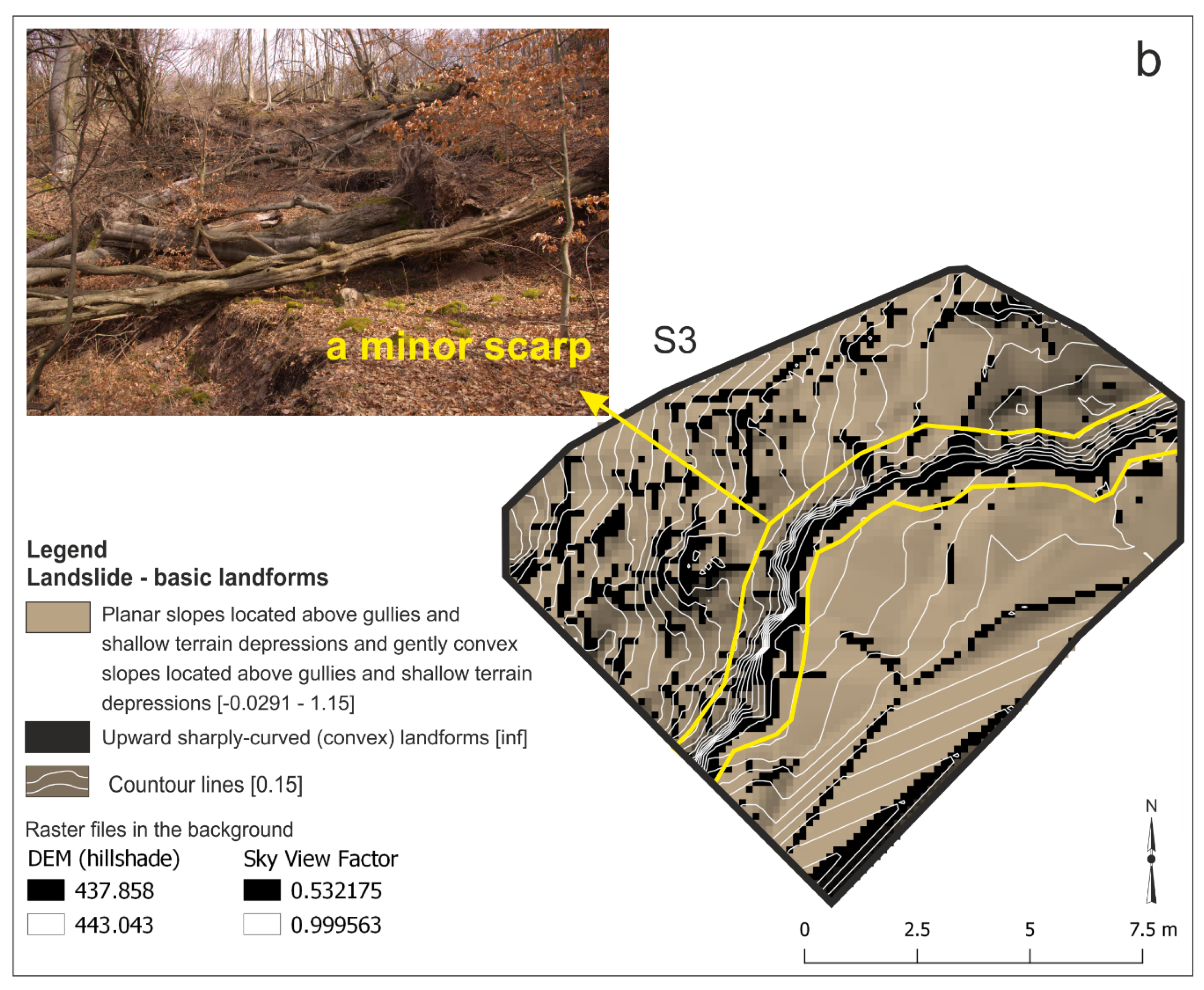
- Upper units can undergo fracturing and extension with subsequent disintegration, subsidence, and various type of movements [34]. These processes result in the formation of tension cracks, fractures, scarps, or tear-off landforms at the tops (heads) of landslide slopes. Those terrain features are commonly good indicators of failure initiation [35]. Therefore, the methodology proposed in the article aims to interpret and highlight these topographic structures.
- The use of detailed 3D information terrain surfaces allow the investigation of slope failures at different spatial and temporal scales, including the mapping of geomorphologic features and shape recognition that can also be used to track objects or slope failures [5]. There exists large diversity of variables that can be derived from DEMs, and, from this aspect, they remain underexploited [36].
3.1. Data Acquisition in the Field
3.2. Data Processing in GIS Laboratory
3.2.1. Check Points Transformation, Applied GIS Software, Modules, and Tools
- The Lasnoise tool was used to exclude low noise points [class 7] because, in case of ground point derivation in further steps, it is recommended to leave out low noise points [39]. Clusters of low points occur frequently in image areas that were strongly shadowed, which was the case of the RPAS photographing of the landslide in the rugged terrain under dense forest canopy.
- The Lasground_new tool was used for bare-earth extraction; it classifies points into ground points (class = 2) and non-ground points (class = 1), and we computed the height of each point (without replacing -z) above the ground [39] in cases of the RPAS and the SfM CRP data.
- The Lasheight_classify tool computes the height of each point above the ground and creates normalized point clouds in the selected height or interval of heights [39]. This tool was used for the processing of RPAS point clouds because photogrammetric scanning was done above a dense canopy of trees, locally, with a lower level of shrubs and where bare-earth was not visible. Therefore, we took into consideration all points from the ground within a interval from 0 m to 0.1 m.
- Module of Slope, Aspect, and Curvature: Terrain curvature is one of the most essential local morphometric parameters applied in landform analyses [42]. It is a curvature of a principal section with the highest value of curvature at a given point of the topographic surface [43]. Maximal curvature is scale-sensible and dependent on the location of cells within a raster grid because the odd number of cells in the square window such that the cells on the edges of a DEM remain unclassified [41] and its values can be positive (convex landforms), negative (concave landforms), or zero (planar slopes).
- Module of Valley Depth and Basic Terrain Analysis: The valley depth is one of several non-local morphometric factors affecting the landslide susceptibility and it is calculated as the vertical distance to the base level of the channel network [44]. The threshold value for the ridge detection was set to 4 for the LiDAR DEM and the RPAS DEM. The threshold value for the ridge detection for the DEM created from the SfM CRP data was set to a value of 1. The tension threshold defined by the percentage of cell size was set to a default of 1 for all DEMs. Module of Basic Terrain Analysis was used for the calculations of topographic wetness index (TWI), which is a combined type of morphometric variable. TWI can be used to predict future landslide movements [45]. Higher values of the TWI represent drainage depressions, or deeper erosive landforms as hollows, ravines, gullies and lower values represent crests and ridges. TWI visualized a drainage network in the studied landslide area in Figure 2.
- Module of Sky View Factor is not just an effective visualization method but also a powerful spatial analysis method with numerous applications [46]. A Sky View Factor is a solar morphometric variable interpreted in raster file—a shaded terrain model highlighting the brightness and contrast of landform discontinuities. It ranges from 1, for completely unobstructed surfaces (for example, horizontal surfaces, peaks and ridges), to 0, for completely obstructed surfaces [47]. We set up search radius to 100 m for the LiDAR and the RPAS data and to 5 m for the SfM CRP data.
3.2.2. Landslide Detection and Delineation in DEM Derivatives Generated from Point Clouds
4. Results
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mora, O.E.; Liu, J.K.; Lenzano, M.G.; Toth, C.K.; Grejner-Brzezinska, D.A. Small Landslide Susceptibility and Hazard Assessment Based on Airborne Lidar Data. Photogramm. Eng. Remote Sens. 2015, 81, 239–247. [Google Scholar] [CrossRef]
- Huang, H.; Song, K.; Yi, W.; Long, J.; Liu, Q.; Zhang, G. Use of multi-source remote sensing images to describe the sudden Shanshucao landslide in the Three Gorges Reservoir, China. Bull. Eng. Geol. Environ. 2018, 1–20. [Google Scholar] [CrossRef]
- Del Soldato, M.; Riquelme, A.; Bianchini, S.; Tomàs, R.; Di Martire, D.; De Vita, P.; Moretti, S.; Calcaterra, D. Multisource data integration to investigate one century of evolution for the Agnone landslide (Molise, southern Italy). Landslides 2018, 15, 1–16. [Google Scholar] [CrossRef]
- Mora, O.E.; Lenzano, M.G.; Toth, C.K.; Grejner-Brzezinska, D.A.; Fayne, J.V. Landslide Change Detection Based on Multi-Temporal Airborne LiDAR-Derived DEMs. Geosciences 2018, 8, 23. [Google Scholar] [CrossRef]
- Abellan, A.; Derron, M.-H.; Jaboyedoff, M. “Use of 3D Point Clouds in Geohazards” Special Issue: Current Challenges and Future Trends. Remote Sens. 2016, 8, 130. [Google Scholar] [CrossRef]
- Peternel, T.; Kmelj, Š.; Oštir, K.; Komac, M. Monitoring the Potoška planina landslide (NW Slovenia) using UAV photogrammetry and tachymetric measurements. Landslides 2017, 14, 395–406. [Google Scholar] [CrossRef]
- Prokešová, R.; Kardoš, M.; Tábořík, P.; Medveďová, A.; Stacke, V.; Chudý, F. Kinematic behaviour of a large earthflow defined by surface displacement monitoring, DEM differencing, and ERT imaging. Geomorphology 2014, 224, 86–101. [Google Scholar] [CrossRef]
- Chudý, F.; Slámová, M.; Tomaštík, J.; Tunák, D.; Kardoš, M.; Saloň, Š. The application of civic technologies in a field survey of landslides. Land Degrad. Dev. 2018, 29, 1858–1870. [Google Scholar] [CrossRef] [Green Version]
- Razak, K.A.; Straatsma, M.W.; van Westen, C.J.; Malet, J.P.; de Jong, S.M. Airborne laser scanning of forested landslides characterization: Terrain model quality and visualization. Geomorphology 2011, 126, 186–200. [Google Scholar] [CrossRef]
- Pirasteh, S.; Li, J. Landslides investigations from geoinformatics perspective: Quality, challenges, and recommendations. Geomatics. Geomat. Nat. Hazards Risk 2016, 1–18. [Google Scholar] [CrossRef]
- Godone, D.; Giordan, D.; Baldo, M. Rapid mapping application of vegetated terraces based on high resolution airborne LiDAR. Geomat. Nat. Hazards Risk 2018, 9, 970–985. [Google Scholar] [CrossRef]
- Kaiser, A.; Neugirg, F.; Rock, G.; Müller, C.; Haas, F.; Ries, J.; Schmidt, J. Small-Scale Surface Reconstruction and Volume Calculation of Soil Erosion in Complex Moroccan Gully Morphology Using Structure from Motion. Remote Sens. 2014, 6, 7050–7080. [Google Scholar] [CrossRef] [Green Version]
- Medjkane, M.; Maquaire, O.; Costa, S.; Roulland, T.; Letortu, P.; Fauchard, C.; Antoine, R.; Davidson, R. High-resolution monitoring of complex coastal morphology changes: Cross-efficiency of SfM and TLS-based survey (Vaches-Noires cliffs, Normandy, France). Landslides 2018, 15, 1097–1108. [Google Scholar] [CrossRef]
- Sturdivant, E.J.; Lentz, E.E.; Thieler, E.R.; Farris, A.S.; Weber, K.M.; Remsen, D.P.; Miner, S.; Henderson, R.E. UAS-SfM for Coastal Research: Geomorphic Feature Extraction and Land Cover Classification from High-Resolution Elevation and Optical Imagery. Remote Sens. 2017, 9, 1020. [Google Scholar] [CrossRef]
- Stumpf, A.; Malet, J.P.; Allemand, P.; Pierrot-Deseilligny, M.; Skupinski, G. Groundbased multi-view photogrammetry for the monitoring of landslide deformation and erosion. Geomorphology 2015, 231, 130–145. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glassera, N.F.; Hambreya, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- Chudy, F.; Sadibol, J.; Slamova, M.; Belacek, B.; Pažinova, N.; Beljak, J. Identification of Historic Roads in the Forest Landscape by Modern Contactless Methods of Large-Scale Mapping. In Proceedings of the GeoConference on Informatics, Geoinformatics and Remote Sensing, Albena, Bulgary, 17–26 June 2014; Volume 3, pp. 183–190. [Google Scholar] [CrossRef]
- Roberto, R.; Lima, J.P.; Araújo, T.; Teichrieb, V. Evaluation of Motion Tracking and Depth Sensing Accuracy of the Tango Tablet. In Proceedings of the 2016 IEEE International Symposium on Mixed and Augmented Reality (ISMAR-Adjunct), Merida, Yucatan, Mexico, 19–23 September 2016; Veas, E., Langlotz, T., Martinez-Carranza, J., Eds.; The Institute of Electrical and Electronics Engineers, Inc.: Danvers, MA, USA, 2016; pp. 231–234, ISBN 978-1-5090-3740-7. [Google Scholar] [CrossRef]
- Tomaštík, J.; Saloň, Š.; Tunák, D.; Chudý, F.; Kardoš, M. Tango in forests—An initial experience of the use of the new Google technology in connection with forest inventory tasks. Comput. Electron. Agric. 2017, 141, 109–117. [Google Scholar] [CrossRef]
- Giordan, D.; Manconi, A.; Tannant, D.D.; Allasia, P. UAV: Low-cost remote sensing for high-resolution investigation of landslides. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; The Institute of Electrical and Electronics Engineers, Inc.: Danvers, MA, USA, 2015; pp. 5344–5347, ISBN 978-1-4799-7929-5. [Google Scholar] [CrossRef]
- Jiang, L.; Ling, D.; Zhao, M.; Wang, C.; Liang, O.; Liu, K. Effective Identification of Terrain Positions from Gridded DEM Data Using Multimodal Classification Integration. ISPRS Int. Geo-Inf. 2018, 7, 443. [Google Scholar] [CrossRef]
- Newman, D.R.; Lindsay, J.B.; Cockburn, J.M.H. Evaluating metrics of local topographic position for multiscale geomorphometric analysis. Geomorphology 2018, 312, 40–50. [Google Scholar] [CrossRef]
- Hou, W.; Lu, X.; Wu, P.; Xue, A.; Li, L. An Integrated Approach for Monitoring and Information Management of the Guanling Landslide (China). ISPRS Int. J. Geo-Inf. 2017, 6, 79. [Google Scholar] [CrossRef]
- Bednarik, M.; Liščák, P. Landslide susceptibility assessment in: Slovakia. Mineralia Slovaca 2010, 42, 193–204. [Google Scholar]
- Vass, D. Regional-Geological Division of the Slovak Republic, 1:500,000 [online]. Available online: http://apl.geology.sk/temapy (accessed on 12 October 2018). (In Slovak).
- Maglay, J.; Pristaš, J.; Kučera, M.; Ábelová, M.; Fritzman, R.; Vlachovič, J.; Bystrická, G.; State Geological Institute of Dionyz Stur, Slovakia; Ministry of the Environment of the Slovak Republic; Geodesy, Cartography and Cadaster Office of the Slovak Republic. 2009: Quaternary Geological Map of the Slovak Republic, 1:500,000 [online]. Available online: http://apl.geology.sk/temapy/ (accessed on 12 October 2018). (In Slovak)
- Šimeková, J.; Martinčeková, T.; Abrahám, P.; Gejdoš, T.; Grenčíková, A.; Grman, D.; Hrašna, M.; Jadroň, D.; Záthurecký, A.; Kotrčová, E.; et al. The Atlas of the Slope Stability Maps of the Slovak Republic at a Scale 1:50,000; INGEO-IGHP: Žilina, Slovakia, 2006; 155p. (In Slovak) [Google Scholar]
- Slope Failures of the Slovak Republic. Available online: http://apl.geology.sk/geofond/zosuvy// (accessed on 12 October 2018). (In Slovak).
- Günther, A.; Hervás, J.; Van Den Eeckhaut, M.; Malet, J.P.; Reichenbach, P. Synoptic pan-European landslide susceptibility assessment: The ELSUS 1000 v1 map. In Landslide Science for a Safer Geoenvironment; Sassa, K., Canuti, P., Yin, Y., Eds.; Springer: Cham, Switzerland, 2014; pp. 117–122. [Google Scholar] [CrossRef]
- Długosz, M. Digital Terrain Model (DTM) as a Tool for Landslide Investigation in The Polish Carpathians. Studia Geomorphologica Carpatho-Balcanica 2012, XLVI, 5–23. [Google Scholar] [CrossRef]
- Hölbling, D.; Füreder, P.; Antolini, F.; Cigna, F.; Casagli, N.; Lang, S. A Semi-Automated Object-Based Approach for Landslide Detection Validated by Persistent Scatterer Interferometry Measures and Landslide Inventories. Remote Sens. 2012, 4, 1310–1336. [Google Scholar] [CrossRef] [Green Version]
- Schillaci, C.; Braun, A.; Kropáček, J. Terrain analysis and landform recognition. In Geomorphological Techniques; British Society for Geomorphology: London, UK, 2015; Chapters 2.4.2; pp. 1–18. ISSN 2047-0371. [Google Scholar]
- Berti, M.; Corsini, A.; Daehne, A. Comparative analysis of surface roughness algorithms for the identification of active landslides. Geomorphology 2013, 182, 1–18. [Google Scholar] [CrossRef]
- Varnes, D.J. Slope Movement Types and Processes. In Landslides: Analysis and Control, National Research Council, Washington DC, Transportation Research Board, Special Report 176; Schuster, R.L., Krizek, R.J., Eds.; National Academy Press: Washington, DC, USA, 1978; pp. 11–33. [Google Scholar]
- Highland, L.M.; Bobrwosky, P. The Landslide Handbook—A Guide to Understanding Landslides; The U.S. Geological Survey: Reston, VA, USA, 2008; p. 11. ISBN 9781411322264.
- Leempoel, K.; Parisod, C.; Geiser, C.; Daprà, L.; Vittoz, P.; Joost, S. Very high-resolution digital elevation models: Are multi-scale derived variables ecologically relevant? Methods Ecol. Evol. 2015, 6, 1373–1383. [Google Scholar] [CrossRef]
- AgiSoft PhotoScan Professional. Software and Software Manual 2018. Available online: http://www.agisoft.com (accessed on 10 December 2018).
- Del Soldato, M.; Riquelme, A.; Tomás, R.; De Vita, P.; Moretti, S. Application of Structure from Motion photogrammetry to multi-temporal geomorphological analyses: Case studies from Italy and Spain. Geogr. Fis. Dinam. Quat. 2018, 41, 51–66. [Google Scholar] [CrossRef]
- Riquelme, A.; Del Soldato, M.; Tomás, R.; Cano, M.; Bordehore, J.L.; Morettic, S. Digital landform reconstruction using old and recent open access digital aerial photos. Geomorphology 2019, 329, 206–223. [Google Scholar] [CrossRef]
- Rapidlasso GmbH, Lasnoise. Available online: https://rapidlasso.com/lastools/ (accessed on 15 November 2018).
- Rana, S. Use of Plan Curvature Variations for the Identification of Ridges and Channels on DEM. In Progress in Spatial Data Handling: 12th International Symposium on Spatial Data Handling; Riedl, A., Kainz, W., Elmes, A.G., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 789–804. ISBN 978-3-540-35588-5. [Google Scholar] [CrossRef]
- Krebs, P.; Stocker, M.; Pezzatti, G.B.; Conedera, M. An alternative approach to transverse and profile terrain curvature. Int. J. Geogr. Inf. Sci. 2015, 29, 643–666. [Google Scholar] [CrossRef]
- Curvature, Earth and Planetary Sciences, Science Direct. Available online: https://www.sciencedirect.com/topics/earth-and-planetary-sciences/curvature (accessed on 5 October 2018).
- Lee, S.; Lee, M.J.; Lee, S. Spatial prediction of urban landslide susceptibility based on topographic factors using boosted trees. Environ. Earth Sci. 2018, 77, 656. [Google Scholar] [CrossRef]
- Ylmaz, I. Landslide susceptibility mapping using frequency ratio, logistic regression, artificial neural networks and their comparison: A case study from Kat landslides (Tokat—Turkey). Comput. Geosci. 2009, 35, 1125–1138. [Google Scholar] [CrossRef]
- Zakšek, K.; Oštir, Ž.; Kokalj, O. Sky-View Factor as a Relief Visualization Technique. Remote Sens. 2011, 3, 398–415. [Google Scholar] [CrossRef] [Green Version]
- Harris, A.; Baird, A.J. Microtopographic Drivers of Vegetation Patterning in Blanket Peatlands Recovering from Erosion. Ecosystems 2018, 1–20. [Google Scholar] [CrossRef]
- QGIS Python Plugins Repository, Plugins by Kosuke ASAHI. Available online: https://plugins.qgis.org/plugins/author/Kosuke%20ASAHI/ (accessed on 14 November 2018).
- Kaneda, H.; Chiba, T. Stereopaired Morphometric Protection Index Red Relief Image Maps (Stereo MPI-RRIMs): Effective Visualization of High-Resolution Digital Elevation Models for Interpreting and Mapping Small Tectonic Geomorphic Features. Bull. Seismol. Soc. Am. 2019, 108. [Google Scholar] [CrossRef]
- Red Relief Image Map. Available online: https://www.rrim.jp/en/patent/ (accessed on 22 January 2019).
- Chiba, T.; Kaneta, S.; Suzuki, Y. Red Relief Image Map, New Visualization Method for Three Dimensional Data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1071–1076. [Google Scholar]
- CSMapMaker. Available online: https://github.com/waigania13/CSMapMaker (accessed on 31 January 2019).
- GISGeography. Available online: https://gisgeography.com/quantile-classification-gis/ (accessed on 12 December 2018).
- Holata, L.; Plzák, J.; Světlík, R.; Fonte, J. Integration of Low-Resolution ALS and Ground-Based SfM Photogrammetry Data. A Cost-Effective Approach Providing an ‘Enhanced 3D Model’ of the Hound Tor Archaeological Landscapes (Dartmoor, South-West England). Remote Sens. 2018, 10, 1357. [Google Scholar] [CrossRef]
- Różycka, M.; Migoń, P.; Michniewicz, A. Topographic Wetness Index and Terrain Ruggedness Index in geomorphic characterisation of landslide terrains, on examples from the Sudetes, SW Poland. Z. Geomorphol. 2017, 61, 61–80. [Google Scholar] [CrossRef]
- Korzeniowska, K.; Korup, O. Mapping gullies using terrain surface roughness. In Proceedings of the 19th AGILE International Conference on Geographic Information Science (AGILE 2016), Helsinki, Finland, 14–17 June 2016; Sarjakoski, T., Yasmina, M., Sarjakoski, S., Sarjakoski, T., Eds.; The Association of Geographic Information Laboratories for Europe (AGILE): Helsinky, Finland, 2016; p. 5, ISBN 978-3-319-33782-1. [Google Scholar]
- Guzzetti, F.; Mondini, A.C.; Cardinali, M.; Fiorucci, F.; Santangelo, M.; Chang, K.T. Landslide inventory maps: New tools for and old problem. Earth-Sci. Rev. 2012, 112, 42–66. [Google Scholar] [CrossRef]
- Van den Eeckhaut, E.; Poesen, J.; Verstraeten, G.; Vanacker, V.; Nyssen, J.; Moeyersons, J.; van Beek, L.P.H.; Vandekerckhove, L. Use of LIDAR-derived images for mapping old landslides under forest. Earth Surf. Proc. Land 2006, 32, 754–769. [Google Scholar] [CrossRef]
- Hsieh, Y.-C.; Chan, Y.-C.; Hu, J.-C. Digital Elevation Model Differencing and Error Estimation from Multiple Sources: A Case Study from the Meiyuan Shan Landslide in Taiwan. Remote Sens. 2016, 8, 199. [Google Scholar] [CrossRef]
- Wilson, M.W. Paper on the criticality of mapping practices: Geodesign as critical GIS? Landsc. Urban Plan. 2015, 142, 226–234. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Airborne Laser Scanning (LiDAR) Technology 1 | Aerial Photogrammetry Performed by Remotely Piloted Aircraft System (RPAS) | Close-Range Photogrammetry (CRP) Performed by Structure-from-Motion Method (SfM) |
|---|---|---|---|
| Device | RIEGL LMS Q680i airborne scanner | Phantom 3 Professional RPAS | SLR EOS 5D Mark II digital camera (calibrated) |
| Height an average flight height above ground level (AGL) [m] | 700 | 43 | terrestrial |
| Device parameters | A field of view (FOV) 60°; an overlaid average of 40%, and a scanning frequency of 122 Hz | sensor: 1/2.3” CMOS; effective resolution: 12.4 M (total pixels: 12.76 M); lens: diagonal FOV 94°, focal length 20 mm (equivalent is 35 mm format); focus from f/2.8 to infinity | EF 16–35 mm f/2.8 L II USM; a full-frame CMOS sensor (36 mm × 24 mm) with a resolution of 21.1 megapixels; focal length 35 mm |
| Total area [m2]/segment in the article [m2] | 36,531/36,531 | 29,617/11,242 | 9132/0.126 |
| The average point cloud density [points/m2] | 9 | 500 | 92,300 |
| Model accuracy—the value of RMSE: Spatial mXYH [m]; Positional (horizontal) mX [m]; Vertical mH [m] | 0.047 m (declared by the provider) | 0.05 0.03 | 0.02 0.007 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chudý, F.; Slámová, M.; Tomaštík, J.; Prokešová, R.; Mokroš, M. Identification of Micro-Scale Landforms of Landslides Using Precise Digital Elevation Models. Geosciences 2019, 9, 117. https://doi.org/10.3390/geosciences9030117
Chudý F, Slámová M, Tomaštík J, Prokešová R, Mokroš M. Identification of Micro-Scale Landforms of Landslides Using Precise Digital Elevation Models. Geosciences. 2019; 9(3):117. https://doi.org/10.3390/geosciences9030117
Chicago/Turabian StyleChudý, František, Martina Slámová, Julián Tomaštík, Roberta Prokešová, and Martin Mokroš. 2019. "Identification of Micro-Scale Landforms of Landslides Using Precise Digital Elevation Models" Geosciences 9, no. 3: 117. https://doi.org/10.3390/geosciences9030117
APA StyleChudý, F., Slámová, M., Tomaštík, J., Prokešová, R., & Mokroš, M. (2019). Identification of Micro-Scale Landforms of Landslides Using Precise Digital Elevation Models. Geosciences, 9(3), 117. https://doi.org/10.3390/geosciences9030117