Reconstruction of Late Pleistocene-Holocene Deformation through Massive Data Collection at Krafla Rift (NE Iceland) Owing to Drone-Based Structure-from-Motion Photogrammetry


 ,
,  and
and
Abstract
:1. Introduction
2. Geological Background
3. Methods
3.1. Drone Surveys and Data Collection
3.2. Photogrammetry Processing
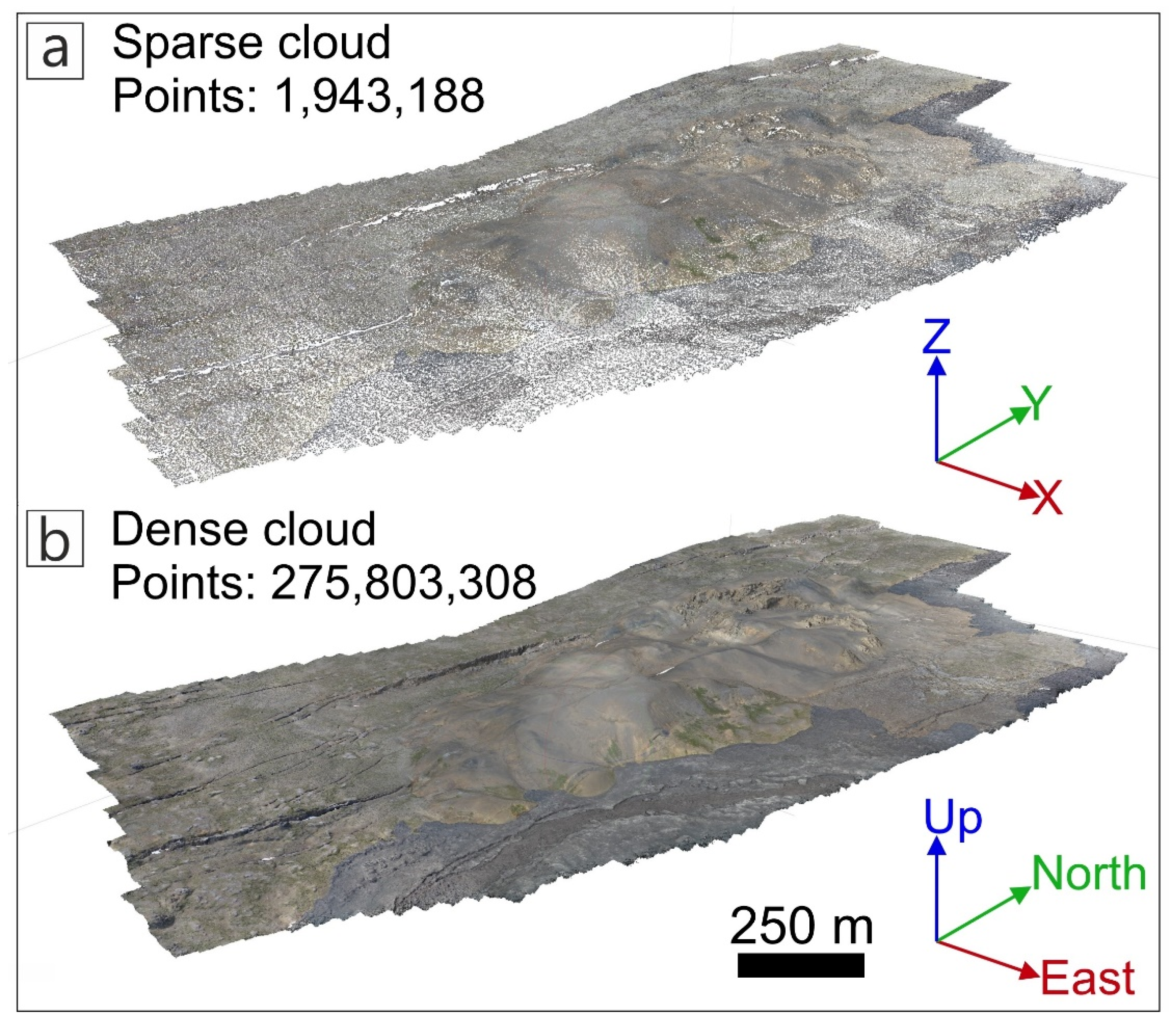
- Photo alignment: an initial low-quality photo alignment using common key points in each image generated a sparse 3-D point cloud (Figure 4a). The focal length and photo dimensions were automatically computed by the software and then used for the subsequent calibration of the core parameters of the camera (principal point coordinates, lens distortion coefficients).
- Georeferencing: GCPs were identified into the photos and markers have been assigned with the surveyed coordinates. This process allowed to scale and georeference the point cloud and thus to improve the accuracy of the final models. Then, the images were realigned using high accuracy settings and default values for Tie and Key points settings, 40,000 and 4000 respectively, and using Generic and Reference preselection settings.
- Dense Point Cloud Building: a 3-D dense point cloud was generated, using a mild depth filtering and medium quality settings, from the sparse point cloud (Figure 4b).
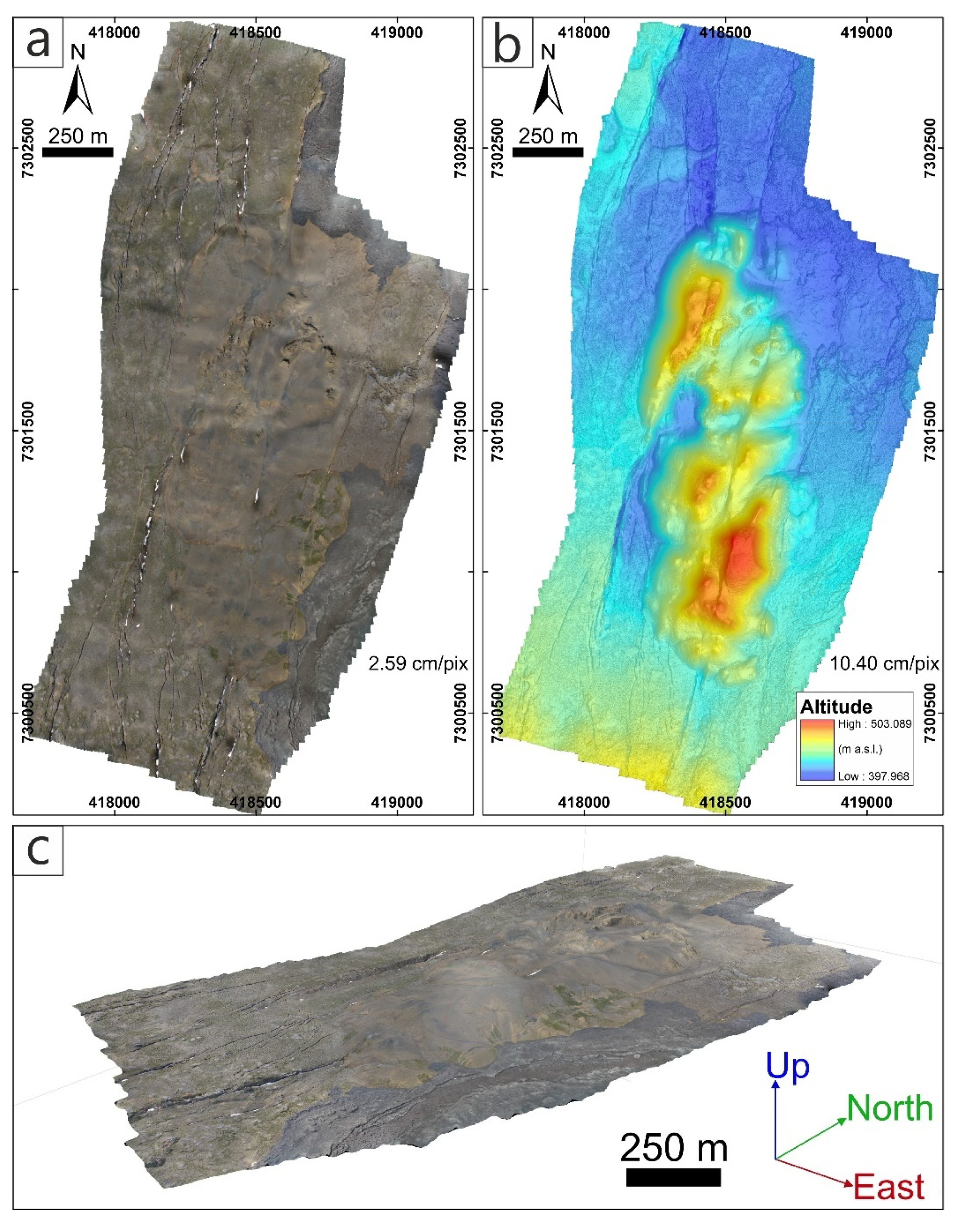
- DSM and orthomosaic generation: a DSM was generated from the dense point cloud, and successively the orthomosaic was produced using the corresponding DSM (Figure 5a,b).
3.3. Data Collection on 2-D and 3-D Outputs
4. Results
4.1. High Resolution Outputs from Photogrammetry Processing
4.2. New Geological-Structural Data
5. Discussion
5.1. Rift Architecture and Kinematics
5.2. Rift Extension Rate
5.3. Methodological Aspects
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CORS | Continuously Operating Reference Station |
| CVZ | Central Volcanic Zone |
| DSM | Digital Surface Model |
| DTM | Digital Terrain Model |
| EVZ | East Volcanic Zone |
| EXIF | Exchangeable Image File Format |
| GIS | Geographic Information System |
| GLONASS | GLObal NAvigation Satellite System |
| GPS | Global Positioning System |
| GCP | Ground Control Point |
| GNSS | Global Navigation Satellite System |
| KFS | Krafla Fissure Swarm |
| ICECORS | Regional positioning service of Iceland |
| LGM | Late Glacial Maximum |
| LiDAR | Light Detection and Ranging/Laser Imaging Detection and Ranging |
| NTRIP | Networked Transport of RTCM via Internet Protocol |
| NVZ | Northern Volcanic Zone |
| RTK | Real-time kinematic |
| SfM | Structure-from-Motion |
| TLS | Terrestrial Laser Scanning |
| ALS | Airborne Laser Scanning |
| ThFS | Theistareykir Fissure Swarm |
| UAV | Unmanned Aerial Vehicles |
| UTM | Universal Transverse Mercator |
| WGS84 | World Geodetic System 1984 |
| WVZ | Western Volcanic Zone |
References
- Lyakhovsky, V.; Segev, A.; Schattner, U.; Weinberger, R. Deformation and seismicity associated with continental rift zones propagating toward continental margins. Geochem. Geophys. Geosyst. 2012, 13, Q01012. [Google Scholar] [CrossRef]
- Keir, D.; Ebinger, C.J.; Stuart, G.W.; Daly, E.; Ayele, A. Strain accommodation by magmatism and faulting as rifting proceeds to breakup: Seismicity of the northern Ethiopian rift. J. Geophys. Res. Solid Earth 2006, 111, B05314. [Google Scholar] [CrossRef]
- Jestin, F.; Huchon, P.; Gaulier, J.M. The Somalia plate and the East-African Rift system—Present-day kinematics. Geophys. J. Int. 1994, 116, 637–654. [Google Scholar] [CrossRef] [Green Version]
- Chu, D.; Gordon, R.G. Evidence for motion between Nubia and Somalia along the Southwest Indian Ridge. Nature 1999, 398, 64–67. [Google Scholar] [CrossRef]
- Tibaldi, A.; Bonali, F.L.; Mariotto, F.P.; Russo, E.; Tenti, L.R. The development of divergent margins: Insights from the North Volcanic Zone, Iceland. Earth Planet. Sci. Lett. 2019, 509, 1–8. [Google Scholar] [CrossRef]
- Manighetti, I.; King, G.C.P.; Gaudemer, Y.; Scholz, C.H.; Doubre, C. Slip accumulation and lateral propagation of active normal faults in Afar. J. Geophys. Res. Solid Earth 2001, 106, 13667–13696. [Google Scholar] [CrossRef]
- King, G.; Sammis, C.G. The role of off-fault damage in the evolution of normal faults. Earth Planet. Sci. Lett. 2004, 217, 399–408. [Google Scholar]
- Muraoka, H.; Kamata, H. Displacement distribution along minor fault traces. J. Struct. Geol. 1983, 5, 483–495. [Google Scholar] [CrossRef]
- Peacock, D.C.P.; Sanderson, D.J. Displacements, segment linkage and relay ramps in normal fault zones. J. Struct. Geol. 1991, 13, 721–733. [Google Scholar] [CrossRef]
- Bürgmann, R.; Pollard, D.D.; Martel, S.J. Slip distributions on faults: Effects of stress gradients, inelastic deformation, heterogeneous host-rock stiffness, and fault interaction. J. Struct. Geol. 1994, 16, 1675–1690. [Google Scholar] [CrossRef]
- Nicol, A.; Watterson, J.; Walsh, J.J.; Childs, C. The shapes, major axis orientations and displacement patterns of fault surfaces. J. Struct. Geol. 1996, 18, 235–248. [Google Scholar] [CrossRef]
- Roche, V.; Homberg, C.; Rocher, M. Fault displacement profiles in multilayer systems: From fault restriction to fault propagation. Terra Nova 2012, 24, 499–504. [Google Scholar] [CrossRef]
- Tibaldi, A.; Bonali, F.L.; Pasquaré Mariotto, F.A. Interaction between transform faults and rift systems: A combined field and experimental approach. Front. Earth Sci. 2016, 4, 33–47. [Google Scholar] [CrossRef] [Green Version]
- Dumont, S.; Klinger, Y.; Socquet, A.; Doubre, C.; Jacques, E. Magma influence on propagation of normal faults: Evidence from cumulative slip profiles along Dabbahu-Manda-Hararo rift segment (Afar, Ethiopia). J. Struct. Geol. 2017, 95, 48–59. [Google Scholar] [CrossRef] [Green Version]
- Pasquaré Mariotto, F.A.; Bonali, F.L.; Tibaldi, A.; Rust, D.; Oppizzi, P.; Cavallo, A. Holocene displacement field at an emerged oceanic transform-ridge junction: The Husavik-Flatey Fault-Gudfinnugja Fault system, North Iceland. J. Struct. Geol. 2015, 75, 118–134. [Google Scholar] [CrossRef] [Green Version]
- Bonali, F.L.; Tibaldi, A.; Mariotto, F.P.; Saviano, D.; Meloni, A.; Sajovitz, P. Geometry, oblique kinematics and extensional strain variation along a diverging plate boundary: The example of the northern Theistareykir Fissure Swarm, NE Iceland. Tectonophysics 2019, 756, 57–72. [Google Scholar] [CrossRef]
- Bonali, F.L.; Tibaldi, A.; Marchese, F.; Fallati, L.; Russo, E.; Corselli, C.; Savini, A. UAV-based surveying in volcano-tectonics: An example from the Iceland rift. J. Struct. Geol. 2019, 121, 46–64. [Google Scholar] [CrossRef]
- Bonali, F.L.; Tibaldi, A.; Mariotto, F.P.; Russo, E. Interplay between inherited rift faults and strike-slip structures: Insights from analogue models and field data from Iceland. Glob. Planet. Change 2018, 171, 88–109. [Google Scholar] [CrossRef]
- De Beni, E.; Cantarero, M.; Messina, A. UAVs for volcano monitoring: A new approach applied on an active lava flow on Mt. Etna (Italy), during the 27 February–02 March 2017 eruption. J. Volcanol. Geotherm. Res. 2019, 369, 250–262. [Google Scholar] [CrossRef]
- Johnson, K.; Nissen, E.; Saripalli, S.; Arrowsmith, J.R.; McGarey, P.; Scharer, K.; Williams, P.; Blisniuk, K. Rapid mapping of ultrafine fault zone topography with structure from motion. Geosphere 2014, 10, 969–986. [Google Scholar] [CrossRef]
- Angster, S.; Wesnousky, S.; Huang, W.L.; Kent, G.; Nakata, T.; Goto, H. Application of UAV photography to refining the slip rate on the Pyramid Lake fault zone, Nevada. Bull. Seismol. Soc. Am. 2016, 106, 785–798. [Google Scholar] [CrossRef] [Green Version]
- Deffontaines, B.; Chang, K.J.; Champenois, J.; Fruneau, B.; Pathier, E.; Hu, J.C.; Lu, S.T.; Liu, Y.C. Active interseismic shallow deformation of the Pingting terraces (Longitudinal Valley–Eastern Taiwan) from UAV high-resolution topographic data combined with InSAR time series. Geom. Nat. Haz. Risk 2016, 8, 120–136. [Google Scholar] [CrossRef] [Green Version]
- Jiao, Q.; Jiang, W.; Zhang, J.; Jiang, H.; Luo, Y.; Wang, X. Identification of paleoearthquakes based on geomorphological evidence and their tectonic implications for the southern part of the active Anqiu–Juxian fault, eastern China. J. Asian Earth Sci. 2016, 132, 1–8. [Google Scholar] [CrossRef]
- Bi, H.; Zheng, W.; Ren, Z.; Zeng, J.; Yu, J. Using an unmanned aerial vehicle for topography mapping of the fault zone based on structure from motion photogrammetry. Int. J. Remote Sens. 2017, 38, 2495–2510. [Google Scholar] [CrossRef]
- Gao, M.; Xu, X.; Klinger, Y.; van der Woerd, J.; Tapponnier, P. High-resolution mapping based on an Unmanned Aerial Vehicle (UAV) to capture paleoseismic offsets along the Altyn-Tagh fault, China. Sci. Rep. 2017, 7, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Wu, F.; Ran, Y.; Xu, L.; Cao, J.; Li, A. Paleoseismological Study of the Late Quaternary Slip-rate along the South Barkol Basin Fault and Its Tectonic Implications, Eastern Tian Shan, Xinjiang. Acta Geol. Sin. Engl. Edit. 2017, 91, 429–442. [Google Scholar] [CrossRef]
- Cheng, Y.; He, C.; Rao, G.; Yan, B.; Lin, A.; Hu, J.; Yu, Y.; Yao, Q. Geomorphological and structural characterization of the southern Weihe Graben, central China: Implications for fault segmentation. Tectonophysics 2018, 722, 11–24. [Google Scholar] [CrossRef]
- Rao, G.; He, C.; Cheng, Y.; Yu, Y.; Hu, J.; Chen, P.; Yao, Q. Active Normal Faulting along the Langshan Piedmont Fault, North China: Implications for Slip Partitioning in the Western Hetao Graben. J. Geol. 2018, 126, 99–118. [Google Scholar] [CrossRef]
- Trippanera, D.; Ruch, J.; Passone, L.; Jónsson, S. Structural mapping of dike-induced faulting in Harrat Lunayyir (Saudi Arabia) by using high resolution drone imagery. Front. Earth Sci. 2019, 7, 168. [Google Scholar] [CrossRef] [Green Version]
- Weismüller, C.; Urai, J.L.; Kettermann, M.; von Hagke, C.; Reicherter, K. Structure of massively dilatant faults in Iceland: Lessons learned from high-resolution unmanned aerial vehicle data. Solid Earth 2019, 10, 1757–1784. [Google Scholar] [CrossRef] [Green Version]
- Tibaldi, A.; Bonali, F.L.; Vitello, F.; Delage, E.; Nomikou, P.; Antoniou, V.; Becciani, U.; Van Wyk de Vries, B.; Krokos, M.; Whitworth, M. Real world-based immersive Virtual Reality for research, teaching and communication in volcanology. Bull. Volcanol. 2020, 82, 38. [Google Scholar] [CrossRef]
- White, R.S.; Bown, J.W.; Smallwood, J.R. The temperature of the Iceland plume and origin of outward-propagating V-shaped ridges. J. Geol. Soc. 1995, 152, 1039–1045. [Google Scholar] [CrossRef]
- Shen, Y.; Solomon, S.C.; Bjarnason, I.T.; Wolfe, C.J. Seismic evidence for a lower-mantle origin of the Iceland plume. Nature 1998, 395, 62–65. [Google Scholar] [CrossRef]
- Hjartardóttir, Á.R.; Einarsson, P.; Magnusdóttir, S.; Bjornsdóttir, P.; Brandsdóttir, B. Fracture systems of the Northern Volcanic Rift Zone, Iceland: An onshore part of the Mid-Atlantic plate boundary. In Magmatic Rifting and Active Volcanism; Wright, T.J., Ayele, A., Ferguson, D.J., Kidane, T., Vye-Brown, C., Eds.; Geological Society; Special Publications: London, UK, 2016; Volume 420, pp. 297–314. [Google Scholar]
- Sæmundsson, K. Geology of the Krafla system. In the Natural History of Lake Myvatn; Gardarson, A., Einarsson, Á., Eds.; Icelandic Natural History Society: Reykjavik, Iceland, 1991; pp. 24–95. [Google Scholar]
- Mattsson, H.B.; Höskuldsson, Á. Contemporaneous phreatomagmatic and effusive activity along the Hverfjall eruptive fissure, north Iceland: Eruption chronology and resulting deposits. J. Volcanol. Geotherm. Res. 2011, 201, 241–252. [Google Scholar] [CrossRef]
- Tibaldi, A.; Bonali, F.L.; Russo, E.; Fallati, L. Surface deformation and strike-slip faulting controlled by dyking and host rock lithology: A compendium from the Krafla Rift, Iceland. J. Volcanol. Geotherm. Res. 2020, 395, 106835. [Google Scholar] [CrossRef]
- Angelier, J.; Bergerat, F.; Dauteuil, O.; Villemin, T. Effective tension-shear relationships in extensional fissure swarms, axial rift zone of northeastern Iceland. J. Struct. Geol. 1997, 19, 673–685. [Google Scholar] [CrossRef]
- Saemundsson, K.; Hjartarson, A.; Kaldal, I.; Sigurgeirsson, M.A.; Kristinsson, S.G.; Vikingsson, S. Geological map of the Northern Volcanic Zone, Iceland; Northern Part 1: 100.000; Iceland GeoSurvey and Landsvirkjun: Reykjavik, Iceland, 2012. [Google Scholar]
- Andrews, J.T.; Hardardottir, J.; Helgadottir, G.; Jennings, A.E.; Geirsdottir, A.; Sveinbjorndottir, A.E.; Schoolfield, S.; Kristjansdottir, G.B.; Smith, L.M.; Thors, K.; et al. The N and W Iceland Shelf: Insights into Last Glacial Maximum ice extent and deglaciation based on acoustic stratigraphy and basal radiocarbon AMS dates. Quat. Sci. Rev. 2000, 19, 619–631. [Google Scholar] [CrossRef]
- Norddahl, H.; Ingolfsson, O. Collapse of the Icelandic ice sheet controlled by sea-level rise? Arktos 2015, 1, 13. [Google Scholar] [CrossRef]
- Pétursson, H.G. The Weichselian glacial history of West Melrakkaslétta, Northeastern Iceland. In Environmental Change in Iceland: Past and Present; Springer: Dordrecht, The Netherlands, 1991; pp. 49–65. [Google Scholar]
- Bjornsson, A. Dynamics of crustal rifting in NE Iceland. J. Geophys. Res. 1985, 90, 10151–10162. [Google Scholar] [CrossRef]
- Gudmundsson, A. The geometry and growth of dykes. In Physics and Chemistry of Dykes; Baer, G., Heimann, A., Eds.; A.A. Balkema: Rotterdam, The Netherlands, 1995; pp. 23–44. [Google Scholar]
- Bjornsson, A.; Saemundsson, K.; Einarsson, P.; Tryggvason, E.; Gronvold, K. Current rifting episode in north Iceland. Nature 1977, 266, 318–323. [Google Scholar] [CrossRef]
- Bjornsson, A.; Johnsen, G.; Sigurdssona, S.; Thorbergsson, G. Rifting of the plate boundary in north Iceland 1975–1978. J. Geophys. Res. 1979, 8, 3029–3038. [Google Scholar] [CrossRef]
- Einarsson, P.S. Wave shadows in the Krafla caldera in NE-Iceland, evidence for a magma chamber in the crust. Bull. Volcanol. 1978, 41, 187–195. [Google Scholar] [CrossRef]
- Hofton, M.A.; Foulger, G.R. Postrifting anelastic deformation around the spreading plate boundary, north Iceland: 1. Modeling of the 1987–1992 deformation field using a viscoelastic Earth structure. J. Geophys. Res. Solid Earth 1996, 101, 25403–25421. [Google Scholar] [CrossRef]
- Hollingsworth, J.; Leprince, S.; Ayoub, F.; Avouac, J.P. New constraints on dike injection and fault slip during the 1975–1984 Krafla rift crisis, NE Iceland. J. Geophys. Res. Solid Earth 2013, 118, 3707–3727. [Google Scholar] [CrossRef] [Green Version]
- Tryggvason, E. Tilt Observations in the Krafla-Mivatn Area 1976–1977. In Report of the Nordic Volcanological Institute, Reykjavík, Iceland; Nordic Volcanological: Reykjavík, Iceland, 1978; Volume 02, p. 45. [Google Scholar]
- Foulger, G.R.; Jahn, C.-H.; Seebet, G.; Einarsson, P.; Julian, B.R.; Heki, K. Post-rifting stress relaxation at the divergent plate boundary in Northeast Iceland. Nature 1992, 358, 488–490. [Google Scholar] [CrossRef]
- Heki, K.; Foulger, G.R.; Julian, B.R.; Jahn, C.-H. Plate dynamics near divergent plate boundaries: Geophysical implications of post-rifting crustal deformation in NE Iceland. J. Geophys. Res. 1993, 98, 14279–14297. [Google Scholar] [CrossRef] [Green Version]
- Jahn, C.-H.; Seeber, G.; Foulger, G.R.; Einarsson, P. GPS epoch measurements panning the mid-Atlantic plate boundary in northern Iceland 1987–1990. In Gravimetry and Space Techniques Applied to Geodynamics and Ocean Dynamics; Schutz, B.E., Anderson, A., Froidevaux, C., Parke, M., Eds.; Geophysical Monograph Series 82; AGU: Washington, DC, USA, 1994; pp. 109–123. [Google Scholar]
- DeMets, C.; Gordon, R.G.; Argus, D.F.; Stein, S. Effect of recent revisions to the geomagnetic reversal time scale on estimates of current plate motions. Geophys. Res. Lett. 1994, 21, 2191–2194. [Google Scholar] [CrossRef]
- Perlt, J.; Heinert, M.; Niemeier, W. The continental margin in Iceland—a snapshot derived from combined GPS networks. Tectonophysics 2008, 447, 155–166. [Google Scholar] [CrossRef]
- Ali, S.T.; Feigl, K.L.; Carr, B.B.; Masterlark, T.; Sigmundsson, F. Geodetic measurements and numerical models of rifting in northern Iceland for 1993–2008. Geophys. J. Int. 2014, 196, 1267–1280. [Google Scholar] [CrossRef] [Green Version]
- Drouin, V.; Sigmundsson, F.; Ófeigsson, B.G.; Hreinsdóttir, S.; Sturkell, E.; Einarsson, P. Deformation in the Northern Volcanic Zone of Iceland 2008–2014: An interplay of tectonic, magmatic, and glacial isostatic deformation. J. Geophys. Res. Solid Earth 2017, 122, 3158–3178. [Google Scholar] [CrossRef]
- Metzger, S.; Jónsson, S.; Geirsson, H. Locking depth and slip-rate of the Húsavík Flatey fault, North Iceland, derived from continuous GPS data 2006–2010. Geophys. J. Int. 2011, 187, 564–576. [Google Scholar] [CrossRef]
- Metzger, S.; Jónsson, S.; Danielsen, G.; Hreinsdóttir, S.; Jouanne, F.; Giardini, D.; Villemin, T. Present kinematics of the Tjörnes Fracture Zone, North Iceland, from campaign and continuous GPS measurements. Geophys. J. Int. 2013, 192, 441–455. [Google Scholar] [CrossRef]
- Hjartardóttir, Á.R.; Einarsson, P.; Bramham, E.; Wright, T.J. The Krafla fissure swarm, Iceland, and its formation by rifting events. Bull. Volcanol. 2012, 74, 2139–2153. [Google Scholar] [CrossRef]
- Bonali, F.L.; Corti, N.; Russo, E.; Marchese, F.; Fallati, L.; Pasquaré Mariotto, F.; Tibaldi, A. Commercial-UAV-based Structure from Motion for geological and geohazard studies. In Building Knowledge for Geohazard Assessment and Management in the Caucasus and Other Orogenic Regions; Bonali, F.L., Tsereteli, N., Pasquarè Mariotto, F., Eds.; NATO SPS Series; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Einarsson, P.; Sæmundsson, K. Earthquake epicenters 1982–1985 and volcanic systems in Iceland: A map. In Í Hlutarins Eðli, Festschriftfor Þorbjörn Sigurgeirsson; Sigfússon, Þ., Ed.; Menningarsjóður: Reykjavik, Iceland, 1987. [Google Scholar]
- Rust, D.; Whitworth, M. A unique~12 ka subaerial record of rift-transform triple-junction tectonics, NE Iceland. Sci. Rep. 2019, 9, 1–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gerloni, I.G.; Carchiolo, V.; Vitello, F.R.; Sciacca, E.; Becciani, U.; Costa, A.; Riggi, S.; Bonali, F.L.; Russo, E.; Fallati, L.; et al. Immersive Virtual Reality for Earth Sciences. In Proceedings of the Federated Conference on Computer Science and Information Systems (FedCSIS) IEEE, Poznan, Poland, 9–12 September 2018; pp. 527–534. [Google Scholar]
- Krokos, M.; Bonali, F.L.; Vitello, F.; Antoniou, V.; Becciani, U.; Russo, E.; Marchese, F.; Fallati, L.; Nomikou, P.; Kearl, M.; et al. Workflows for virtual reality visualisation and navigation scenarios in earth sciences. In Proceedings of the 5th International Conference on Geographical Information Systems Theory, Applications and Management, SciTePress, Heraklion, Greece, 3–5 May 2019; Volume 1, pp. 297–304. [Google Scholar]
- Antoniou, V.; Nomikou, P.; Bardouli, P.; Sorotou, P.; Bonali, F.; Ragia, L.; Metaxas, A. The story map for Metaxa mine (Santorini, Greece): A unique site where history and volcanology meet each other. In Proceedings of the 5th International Conference on Geographical Information Systems Theory, Applications and Management, SciTePress, Heraklion, Greece, 3–5 May 2019; Volume 1, pp. 212–219. [Google Scholar]
- Fallati, L.; Saponari, L.; Savini, A.; Marchese, F.; Corselli, C.; Galli, P. Multi-Temporal UAV Data and Object-Based Image Analysis (OBIA) for Estimation of Substrate Changes in a Post-Bleaching Scenario on a Maldivian Reef. Remote Sens. 2020, 12, 2093. [Google Scholar] [CrossRef]
- Vollgger, S.A.; Cruden, A.R. Mapping folds and fractures in basement and cover rocks using UAV photogrammetry, Cape Liptrap and Cape Paterson, Victoria, Australia. J. Struct. Geol. 2016, 85, 168–187. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117, F03017. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution unmanned aerial vehicle (UAV) imagery, based on structure from motion (SfM) Point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef] [Green Version]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef] [Green Version]
- Tonkin, T.N.; Midgley, N.G. Ground-control networks for image based surface reconstruction: An investigation of optimum survey designs using UAV derived imagery and structure-from-motion photogrammetry. Remote Sens. 2016, 8, 786. [Google Scholar] [CrossRef] [Green Version]
- Chandler, J.H.; Buckley, S.; Carpenter, M.B.; Keane, C.M.; Handbook, G. Structure from motion (SFM) photogrammetry vs terrestrial laser scanning. In Geoscience Handbook, 5th ed.; Carpenter, M.B., Keane, C.M., Eds.; AGI Data Sheets; American Geosciences Institute: Alexandria, VA, USA, 2016. [Google Scholar]
- Ruzgienė, B.; Aksamitauskas, Č.; Daugėla, I.; Prokopimas, Š.; Puodžiukas, V.; Rekus, D. UAV photogrammetry for road surface modelling. Balt. J. Roadridge Eng. 2015, 10, 151–158. [Google Scholar] [CrossRef]
- Ouédraogo, M.M.; Degré, A.; Debouche, C.; Lisein, J. The evaluation of unmanned aerial system-based photogrammetry and terrestrial laser scanning to generate DEMs of agricultural watersheds. Geomorphology 2014, 214, 339–355. [Google Scholar] [CrossRef]
- Benassi, F.; Dall’Asta, E.; Diotri, F.; Forlani, G.; Morra di Cella, U.; Roncella, R.; Santise, M. Testing accuracy and repeatability of UAV blocks oriented with gnss-supported aerial triangulation. Remote Sens. 2017, 9, 172. [Google Scholar] [CrossRef] [Green Version]
- Burns, J.H.R.; Delparte, D. Comparison of commercial structure-from-motion photogrammetry software used for underwater three-dimensional modeling of coral reef environments. In International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences; ISPRS Archives: Heipke, Germany, 2017; Volume 42, pp. 127–131. [Google Scholar]
- Cook, K.L. An evaluation of the effectiveness of low-cost UAVs and structure from motion for geomorphic change detection. Geomorphology 2017, 278, 195–208. [Google Scholar] [CrossRef]
- Verhoeven, G. Taking computer vision aloft–archaeological three-dimensional reconstructions from aerial photographs with photoscan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Brunier, G.; Fleury, J.; Anthony, E.J.; Gardel, A.; Dussouillez, P. Close-range airborne Structure-from-Motion Photogrammetry for high-resolution beach morphometric surveys: Examples from an embayed rotating beach. Geomorphology 2016, 261, 76–88. [Google Scholar] [CrossRef]
- Trinks, I.; Clegg, P.; McCarey, K.; Jones, R.; Hobbs, R.; Holdsworth, B.; Holliman, N.; Imber, J.; Waggott, S.; Wilson, R. Mapping and analysing virtual outcrops. Vis. Geosci. 2005, 10, 13–19. [Google Scholar] [CrossRef]
- Pasquaré Mariotto, F.; Bonali, F.L.; Venturini, C. Iceland, an Open-Air Museum for Geoheritage and Earth Science Communication Purposes. Resources 2020, 9, 14. [Google Scholar] [CrossRef] [Green Version]
- Nomikou, P.; Pehlivanides, G.; El Saer, A.; Karantzalos, K.; Stentoumis, C.; Bejelou, K.; Antoniou, V.; Douza, M.; Vlasopoulos, O.; Monastiridis, K.; et al. Novel Virtual Reality Solutions for Captivating Virtual Underwater Tours Targeting the Cultural and Tourism Industries. In Proceedings of the 6th International Conference on Geographical Information Systems Theory, Applications and Management, Online Streaming, Prague, Czeck Republic, 7–9 May 2020; pp. 7–13. [Google Scholar]
- Choi, D.H.; Dailey-Hebert, A.; Estes, J.S. (Eds.) Emerging Tools and Applications of Virtual Reality in Education; Information Science Reference: Hershey, PA, USA, 2016. [Google Scholar]
- Gudmundsson, A. Formation and growth of normal faults at the divergent plate boundary in Iceland. Terra Nova 1992, 4, 464–471. [Google Scholar] [CrossRef]
- Van Wyk de Vries, B.; Merle, O. The effect of volcanic constructs on rift fault patterns. Geology 1996, 24, 643–646. [Google Scholar] [CrossRef]
- De Matteo, A.; Corti, G.; de Vries, B.V.W.; Massa, B.; Mussetti, G. Fault-volcano interactions with broadly distributed stretching in rifts. J. Volcanol. Geotherm. Res. 2018, 362, 64–75. [Google Scholar] [CrossRef]
- Ruch, J.; Wang, T.; Xu, W.; Hensch, M.; Jónsson, S. Oblique rift opening revealed by reoccurring magma injection in central Iceland. Nat. Commun. 2016, 7, 1–7. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dauteuil, O.; Angelier, J.; Bergerat, F.; Verrier, S.; Villemin, T. Deformation partitioning inside a fissure swarm of the northern Icelandic rift. J. Struct. Geol. 2001, 23, 1359–1372. [Google Scholar] [CrossRef]
- Paquet, F.; Dauteuil, O.; Hallot, E.; Moreau, F. Tectonics and magma dynamics coupling in a dyke swarm of Iceland. J. Struct. Geol. 2007, 29, 1477–1493. [Google Scholar] [CrossRef]
- Niethammer, U.; James, M.R.; Rothmund, S.; Travelletti, J.; Joswig, M. UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results. Eng. Geol. 2012, 128, 2–11. [Google Scholar] [CrossRef]
- Lucieer, A.; Jong, S.M.D.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Gomez, C.; Hayakawa, Y.; Obanawa, H. A study of Japanese landscapes using structure from motion derived DSMs and DEMs based on historical aerial photographs: New opportunities for vegetation monitoring and diachronic geomorphology. Geomorphology 2015, 242, 11–20. [Google Scholar] [CrossRef] [Green Version]
- Jordan, B.R. A bird’s-eye view of geology: The use of micro drones/UAVs in geologic fieldwork and education. GSA Today 2015, 25, 50–52. [Google Scholar] [CrossRef]
- Stöcker, C.; Eltner, A.; Karrasch, P. Measuring gullies by synergetic application of UAV and close range photogrammetr—A case study from Andalusia, Spain. Catena 2015, 132, 1–11. [Google Scholar] [CrossRef]
- Clapuyt, F.; Vanacker, V.; Van Oost, K. Reproducibility of UAV-based earth topography reconstructions based on Structure-from-Motion algorithms. Geomorphology 2016, 260, 4–15. [Google Scholar] [CrossRef]
- Nishar, A.; Richards, S.; Breen, D.; Robertson, J.; Breen, B. Thermal infrared imaging of geothermal environments and by an unmanned aerial vehicle (UAV): A case study of the Wairakei—Tauhara geothermal field, Taupo, New Zealand. Renew. Energy 2016, 86, 1256–1264. [Google Scholar] [CrossRef]
- Chesley, J.T.; Leier, A.L.; White, S.; Torres, R. Using unmanned aerial vehicles and structure-from-motion photogrammetry to characterize sedimentary outcrops: An example from the Morrison Formation, Utah, USA. Sediment. Geol. 2017, 354, 1–8. [Google Scholar] [CrossRef]
- Strick, R.; Ashworth, P.; Best, J.; Lane, S.; Nicholas, A.; Parsons, D.; Sambrook, S.G.; Simpson, C.; Unsworth, C. The challenges in using UAV and plane imagery to quantify channel change in sandy braided rivers. In Proceedings of the Abstracts of EGU General Assembly Conference, Vienna, Austria, 23–28 April 2017; p. 13378. [Google Scholar]
- Mavroulis, S.; Andreadakis, E.; Spyrou, N.I.; Antoniou, V.; Skourtsos, E.; Papadimitriou, P.; Kassaras, I.; Kaviris, G.; Tselentis, G.-A.; Voulgaris, N.; et al. UAV and GIS based rapid earthquake-induced building damage assessment and methodology for EMS-98 isoseismal map drawing: The June 12, 2017 Mw 6.3 Lesvos (Northeastern Aegean, Greece) earthquake. Int. J. Disaster Risk Reduct. 2019, 37, 101169. [Google Scholar] [CrossRef]
- Cawood, A.J.; Bond, C.E.; Howell, J.A.; Butler, R.W.; Totake, Y. LiDAR, UAV or compass-clinometer? Accuracy, coverage and the effects on structural models. J. Struct. Geol. 2017, 98, 67–82. [Google Scholar] [CrossRef]
- Lizarazo, I.; Angulo, V.; Rodríguez, J. Automatic mapping of land surface elevation changes from UAV-based imagery. Int. J. Remote Sens. 2017, 38, 2603–2622. [Google Scholar] [CrossRef]
- Kozhurin, A.; Acocella, V.; Kyle, P.R.; Lagmay, F.M.; Melekestsev, I.V.; Ponomareva, V.; Rust, D.; Tibaldi, A.; Tunesi, A.; Corazzato, C.; et al. Trenching studies of active faults in Kamchatka, eastern Russia: Palaeoseismic, tectonic and hazard implications. Tectonophysics 2006, 417, 285–304. [Google Scholar] [CrossRef]
- Tibaldi, A.; Pasquare, F.A.; Papanikolaou, D.; Nomikou, P. Tectonics of Nisyros Island, Greece, by field and offshore data, and analogue modelling. J. Struct. Geol. 2008, 30, 1489–1506. [Google Scholar] [CrossRef]
- Tortini, R.; Bonali, F.L.; Corazzato, C.; Carn, S.A.; Tibaldi, A. An innovative application of the Kinect in Earth sciences: Quantifying deformation in analogue modelling of volcanoes. Terra Nova 2014, 26, 273–281. [Google Scholar] [CrossRef]
- Russo, E.; Waite, G.P.; Tibaldi, A. Evaluation of the evolving stress field of the Yellowstone volcanic plateau, 1988 to 2010, from earthquake first-motion inversions. Tectonophysics 2017, 700, 80–91. [Google Scholar] [CrossRef]
- Saputra, A.; Rahardianto, T.; Gomez, C. The application of structure from motion (SfM) to identify the geological structure and outcrop studies. In Proceedings of the AIP Conference, Bandung, Indonesia, 11–12 October 2016; Volume 1857, p. 030001. [Google Scholar]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Esposito, G.; Mastrorocco, G.; Salvini, R.; Oliveti, M.; Starita, P. Application of UAV photogrammetry for the multi-temporal estimation of surface extent and volumetric excavation in the Sa Pigada Bianca open-pit mine, Sardinia, Italy. Environ. Earth Sci. 2017, 76, 103. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Proc. Land. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AREA 1 | AREA 2 | AREA 3 | AREA 4 | AREA 5 | AREA 6 | AREA 7 | AREA 8 | AREA 9 | ||
|---|---|---|---|---|---|---|---|---|---|---|
| UAV Images Acquisition | Flying Date | 2019/6/23 | 2019/6/23 | 2019/6/23 | 2019/6/24 | 2019/6/24 | 2019/6/24 | 2019/6/24 | 2019/6/23 | 2019/6/23 |
| Flying Height (m) | 95 | 85 | 90 | 85 | 80 | 85 | 85 | 85 | 85 | |
| Frontal Overlap (%) | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | 85 | |
| Lateral Overlap (%) | 80 | 80 | 80 | 80 | 80 | 80 | 80 | 80 | 80 | |
| Flight Speed (m/s) | 7 | 7 | 7 | 7 | 6 | 6.4 | 6.4 | 6.4 | 6.4 | |
| Shutter Interval (s) | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | |
| Ground Resolution (cm/pix) | 2.6 | 2.3 | 2.4 | 2.3 | 2.2 | 2.3 | 2.3 | 2.3 | 2.3 | |
| Flying Time (mins) | 27 | 53 | 38 | 37 | 43 | 22 | 22 | 22 | 17 | |
| Covered Area (Ha) | 30 | 43 | 30 | 31.72 | 29.12 | 18.54 | 18.67 | 18.14 | 14.25 | |
| Images Numbers | 676 | 1275 | 945 | 922 | 1088 | 543 | 548 | 544 | 427 |
| SfM Photogrammetry processing | Alignment processing accuracy | High | ||||
| Dense Cloud processing accuracy | Medium | |||||
| Dense Cloud Points | 257,803,308 | |||||
| 3-D Tiled Model Resolution | 2.6 cm/pix | |||||
| DSM Resolution | 10 cm/pix | |||||
| Ortomosaic Resolution | 2.6 cm/pix | |||||
| SfM Photogrammetry Processing time | ||||||
| Images Acquisition | Alignment | Dense Cloud | 3-D Tiled Model | DSM | Orthomosaic | Overall Processing |
| 4.7 hrs | 3.4 hrs | 15.16 hrs | 21.20 hrs | 0.13 hrs | 2.21 hrs | 46.8 hrs |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bonali, F.L.; Tibaldi, A.; Corti, N.; Fallati, L.; Russo, E. Reconstruction of Late Pleistocene-Holocene Deformation through Massive Data Collection at Krafla Rift (NE Iceland) Owing to Drone-Based Structure-from-Motion Photogrammetry. Appl. Sci. 2020, 10, 6759. https://doi.org/10.3390/app10196759
Bonali FL, Tibaldi A, Corti N, Fallati L, Russo E. Reconstruction of Late Pleistocene-Holocene Deformation through Massive Data Collection at Krafla Rift (NE Iceland) Owing to Drone-Based Structure-from-Motion Photogrammetry. Applied Sciences. 2020; 10(19):6759. https://doi.org/10.3390/app10196759
Chicago/Turabian StyleBonali, Fabio Luca, Alessandro Tibaldi, Noemi Corti, Luca Fallati, and Elena Russo. 2020. "Reconstruction of Late Pleistocene-Holocene Deformation through Massive Data Collection at Krafla Rift (NE Iceland) Owing to Drone-Based Structure-from-Motion Photogrammetry" Applied Sciences 10, no. 19: 6759. https://doi.org/10.3390/app10196759
APA StyleBonali, F. L., Tibaldi, A., Corti, N., Fallati, L., & Russo, E. (2020). Reconstruction of Late Pleistocene-Holocene Deformation through Massive Data Collection at Krafla Rift (NE Iceland) Owing to Drone-Based Structure-from-Motion Photogrammetry. Applied Sciences, 10(19), 6759. https://doi.org/10.3390/app10196759