2.1. Theoretical Inference of the Relationship between Multi-Point Vibration Responses
The problem we study is how to predict the vibration response of some locations which cannot be measured by using the known vibration response under unknown uncorrelated multi-source loads in the frequency domain. For a linear time invariant (LTI) dynamic structure in the frequency domain, the vibration response is split into two parts: measured vibration responses and unmeasured vibration responses. The measured vibration response means the vibration response value could be measured, and the vibration response value is known; the unmeasured vibration response means that the vibration response value is unknown, and is to be predicted in the model. vibration responses can be classified into measured vibration response points , , and unmeasured vibration response points , , where .
For an LTI dynamics structure in the frequency domain, under the condition that
multi-source loads
are an uncorrelated random process with zero mean and second-order multiple-joint stationary characteristics, the relationship between the self-power spectrum
of the loads
and the self-power spectrum
of the vibration response
can be expressed as [
38]
where
, , denotes the frequency characteristics of the transfer function from input to response , and is the modulo square of . . is the frequency resolution. is the total number of frequencies.
Using the least squares generalized inverse for Equation (1), an estimate
of the self-power spectrum
can be obtained from the self-power spectrum
and
:
Similarly, for the LTI structure in the frequency domain, the relationship between the self-power spectrum
of the loads
and the self-power spectrum
of the vibration responses
[
25] is
where
Substituting Equation (2) into Equation (3):
When
,
, and
are known, the
can be obtained using Equation (4). The frequency characteristics of the transfer function
and
can be obtained by experiment or the FEM method [
36]. In this study, the experimental method is carried out through multi-point excitation to obtain transfer function. In order to get the transfer function, we need to collect the historical data of the load. The transfer function from a load point to a response point can be obtained by single point excitation, and then the transfer function from this point to all response points can be obtained by changing the position of the response measuring point. Then, we can move to another load point to give excitation and repeat the above actions to obtain all the transfer functions of the LTI structure.
2.2. Data-Driven Multiple Regression Analysis Problem Description of Multi-Point Vibration Response Prediction under Unknown Uncorrelated Multi-Source Loads
Let
. Thus, Equation (4) can be rewritten as
When
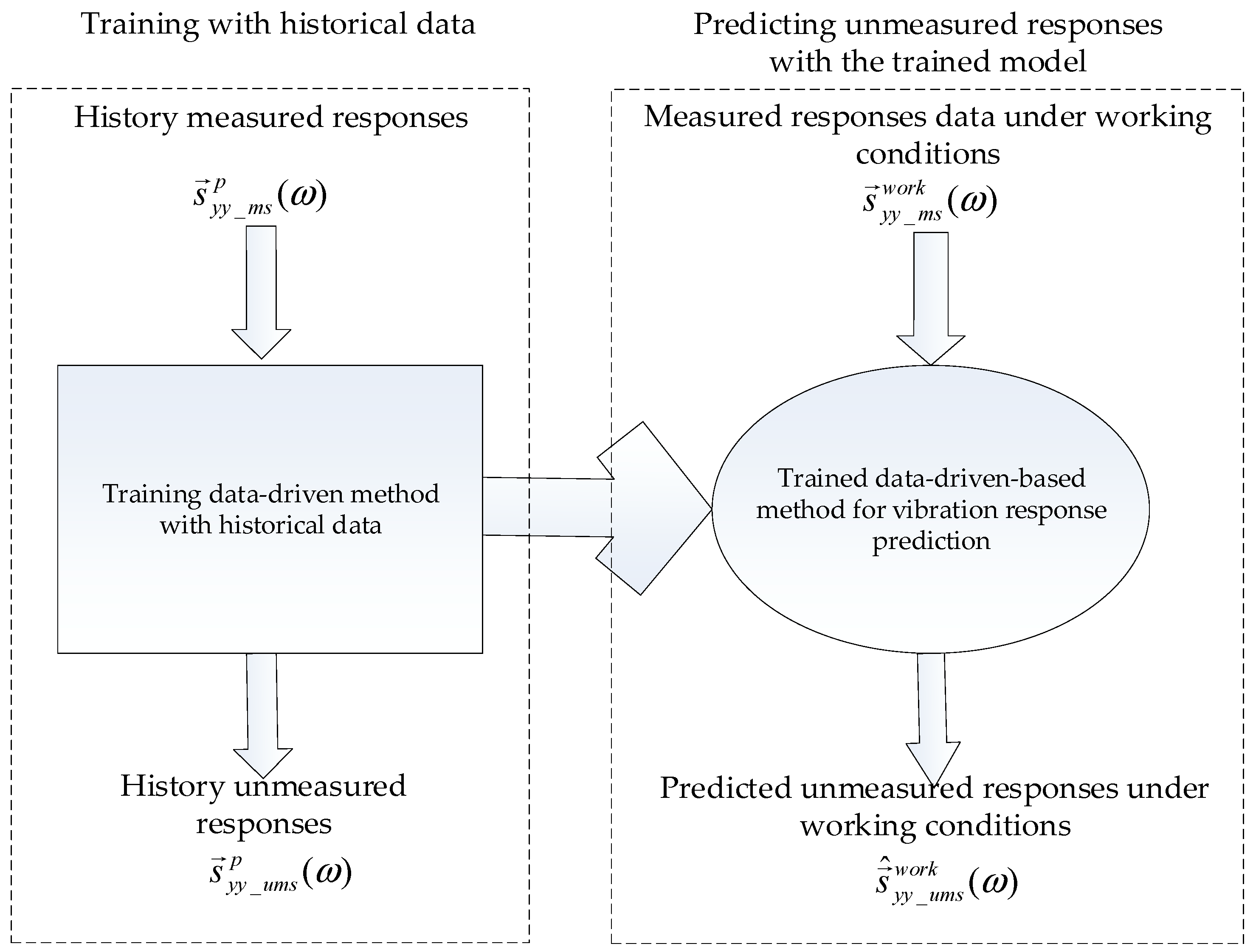
cannot be obtained using transfer functions and least squares generalization, it can be obtained using the history training dataset and a data-driven multi-point vibration response prediction model. Using the measured multi-point vibration response in Equation (3) as the input directly and the unmeasured multi-point vibration response as the output, a multi-input and multi-output multi-point vibration response prediction model for an LTI dynamics structure under unknown uncorrelated multi-source loads can be established using the history training dataset and multiple linear regression model. As shown in
Figure 1, after training, the model can be used to predict the unmeasured vibration response in reality.
As shown in
Figure 1, the history measured vibration response
is the input and the history unmeasured vibration response points
are the output,
, where
is the number of training samples. Similarly, from the historical data for each frequency (
,
is the total number of frequencies), the multi-point vibration response prediction model can be built for every frequency using multiple regression analysis, such as multiple linear regression model, MIMO neural network, or LS-SVR.
After the model is trained, the multi-point vibration response prediction model can be used to predict the unmeasured multi-point vibration response in a real-work condition. The measured multi-point vibration responses are the input of the MIMO model, and the output of the model is the predicted unmeasured multi-point vibration response data.
Clearly, the greater the amount of the history dataset that is used to train the data-driven multi-point vibration response model, the better the results the model acquires for all multiple regression analysis methods.
2.3. Procedure for Building and Applying the MIMO LS-SVR-Based Multi-Point Vibration Response Prediction Model
It can be seen from
Section 2.2 that when
cannot be obtained, the problem can be transformed into a data-driven problem. The data-driven problem for an LTI structure can be solved using a MIMO LS-SVR with a linear or nonlinear kernel function. Thus, the next step is to use MIMO LS-SVR to acquire the complex relation
for each frequency.
LS-SVR [
40,
41] is a regression prediction model, which is developed and improved from Support vector machine (SVM). It is widely used in classification, numerical estimation, and density estimation. Its basic principle is to map the inputs into the high-dimensional space through the kernel function, and then find a hyperplane in the high-dimensional space to build a regression model in the hyperplane.
In the linear model, the predicted response
can be expressed as Equation (6), and the prediction model can be obtained by solving
.
where
,
is
matrix of regression coefficients,
,
is
vector of model offset.
SVR uses a kernel function to map
to a high dimensional feature space to obtain the kernel matrix
:
is the kernel function. In this study, the radial basis function (RBF) kernel function is used.
where
means the kernel width parameter.
The solution of LS-SVR problem can be solved by constructing Lagrange function to solve its corresponding linear Karush–Kuhn–Tucker (KKT):
where
is a
vector of ones,
is a weight vector, and
represents regression vector.
It can be seen from Equations (8) and (9) that LS-SVR has two hyper-parameters .
The in LS-SVR can be obtained by training the model with a training set, and then LS-SVR can be used to predict the response under a real-work condition.
The procedure for building and applying the MIMO LS-SVR-based multi-point vibration response prediction in the frequency domain is shown in
Figure 2.
- (1)
With the measured multi-point vibration responses as the input and the unmeasured multi-point vibration responses as the output, the multi-point vibration response prediction model can be established using the historical training dataset and MIMO LS-SVR.
- (2)
After training, the model can be used to predict the unmeasured vibration response under a real-work condition.
2.4. Theoretical Comparison of Response Prediction Methods
The computation of the condition number of transfer function matrix
is given by
For nearby resonance frequencies, the condition number of the transfer function matrix
is very large. Moreover, there exists an ill-conditioned part in the least squares generalized inverse of the transfer function matrix [
36].
The least squares generalized inverse is needed in the transfer function method and the transmissibility matrix method. The least squares generalized inverse is also needed in the multiple linear regression methods. Because of the existence of an ill-conditioned part in the least squares generalized inverse, the transmissibility matrix and multiple linear regression are not robust to the measurement error, particularly for nearby resonance frequencies.
However, because there are no ill-conditioned parts or a need to use the least squares generalized inverse to calculate the transfer function matrix, using the measured multi-point vibration response to predict the unmeasured multi-point vibration response in the frequency domain using MIMO LS-SVR methods is robust for measurement noise. Simultaneously, the MIMO neural network [
42] also has the above advantages, but the neural network requires many samples and hyperparameters to improve the prediction performance, and it is easy to overfit. It is not easy for the MIMO neural network to achieve a good prediction in small sample experiments. Therefore, MIMO LS-SVR is more suitable for response prediction in this study.
The comparison of the different methods are shown in
Table 1.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}