Variable Dampers to Mitigate Structural Demand to Wind Turbines: The Role of the Monitoring System Features for the Effectiveness of the Control Strategy †



Abstract
:Featured Application
Abstract
1. Introduction
2. A Smart Base Restraint for High Wind Turbines to Mitigate Structural Demand
3. Structural Monitoring via Global Navigation Satellite System: The Case of High Wind Turbines
4. Monitoring and SA Control of a Case-Study Wind Turbine: Sensitivity Analysis for the GNSS System Features
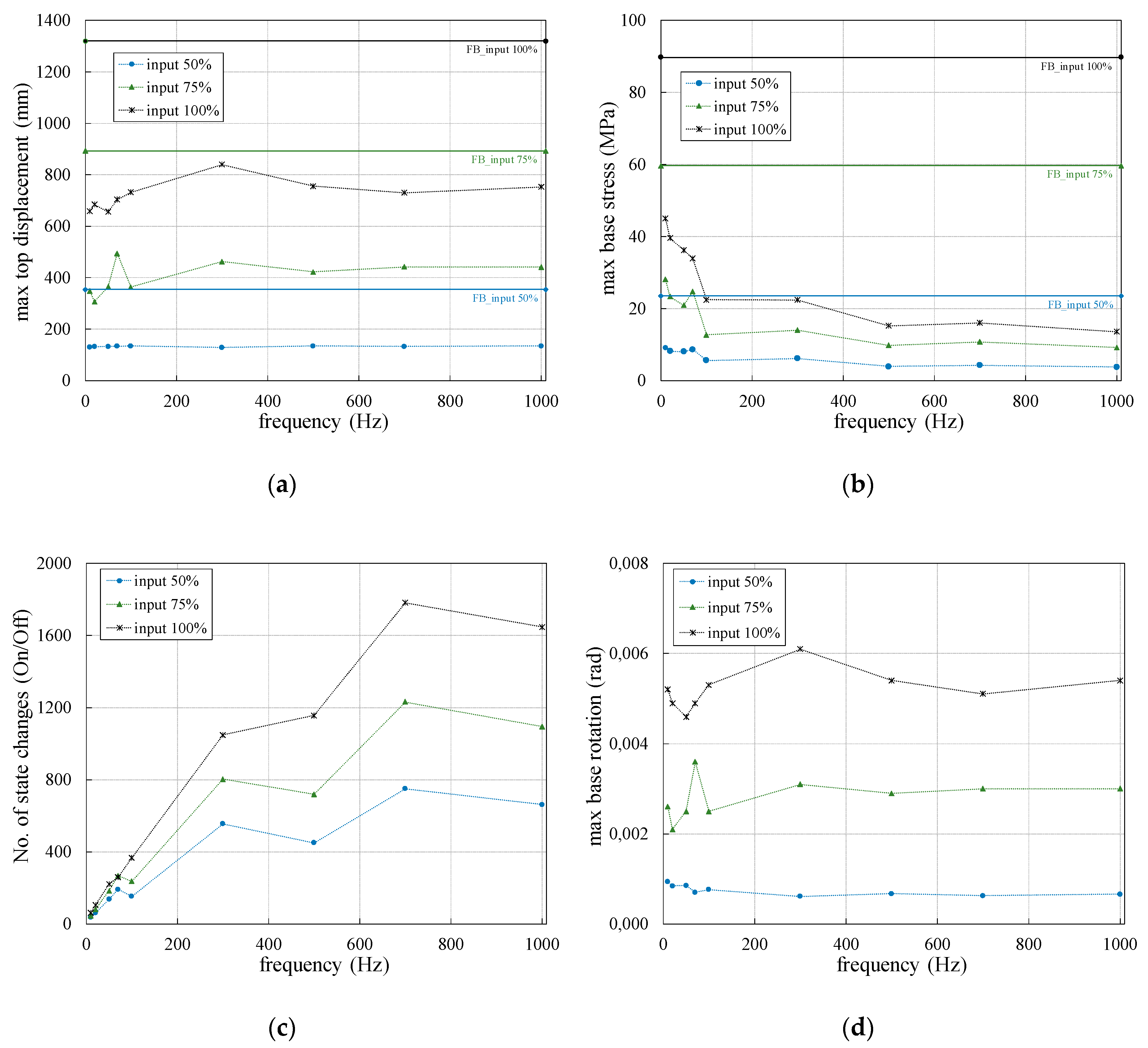
4.1. The Role of Frequency in Measurement
4.2. The Role of Latency in Measurement
4.3. The Role of Accuracy of Measurement
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Caterino, N.; Pugliano, G.; Spizzuoco, M.; Robustelli, U. Feasibility and assessment of real time monitoring systems for smart structural control of wind turbines. In Proceedings of the XV Conference of the Italian Association for Wind Engineering (IN-VENTO 2018), Napoli, Italy, 9–12 September 2018. [Google Scholar]
- Enevoldsen, I.; Mørk, K.J. Effects of a Vibration Mass Damper in a Wind Turbine Tower. Mech. Struct. Mach. 1996, 24, 155–187. [Google Scholar] [CrossRef]
- Kirkegaard, P.H.; Nielsen, S.R.K.; Poulsen, B.R.; Andersen, J.; Pedersen, L.H.; Pedersen, B.J. Semiactive Vibration Control of a Wind Turbine Tower using an MR Damper. In Proceedings of the Fifth European Conference on Structural Dynamics, Munich, Germany, 2–5 September 2002; pp. 1575–1580. [Google Scholar]
- Caterino, N. Semi-active control of a wind turbine via magnetorheological dampers. J. Sound Vib. 2015, 345, 1–17. [Google Scholar] [CrossRef]
- Martynowicz, P. Study of vibration control using laboratory test rig of wind turbine tower-nacelle system with MR damper based tuned vibration absorber. Bull. Pol. Acad. Sci. Tech. Sci. 2017, 64, 347–359. [Google Scholar] [CrossRef]
- Martynowicz, P. Vibration control of wind turbine tower-nacelle model with magnetorheological tuned vibration absorber. JVC 2017, 23, 3468–3489. [Google Scholar] [CrossRef]
- Som, A.; Das, D. Seismic vibration control of offshore jacket platforms using decentralized sliding mode algorithm. Ocean Eng. 2018, 152, 377–390. [Google Scholar] [CrossRef]
- Sarkar, S.; Chakraborty, A. Optimal design of semiactive MR-TLCD for along-wind vibration control of horizontal axis wind turbine tower. Struct. Control Health Monit. 2018, 25, 1–18. [Google Scholar] [CrossRef]
- Arrigan, J.; Pakrashi, V.; Basu, B.; Nagarajaiah, S. Control of flapwise vibrations in wind turbine blades using semi-active tuned mass dampers. J. Struct. Control Health Monit. 2011, 18, 840–851. [Google Scholar] [CrossRef]
- Park, S.; Lackner, M.A.; Cross-Whiter, J.; Tsouroukdissian, A.R.; La Cava, W. An investigation of passive and semi-active tuned mass dampers for a tension leg platform floating offshore wind turbine in ULS conditions. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering—OMAE, OMAE2016-54332 AN, Busan, Korea, 19–24 June 2016; Volume 3, pp. 1–10. [Google Scholar]
- Sun, C. Mitigation of offshore wind turbine responses under wind and wave loading: Considering soil effects and damage. Struct. Control Health Monit. 2018, 25, 1–22. [Google Scholar] [CrossRef]
- Sun, C. Semi-active control of monopile offshore wind turbines under. Mech. Syst. Signal Process. 2018, 99, 285–305. [Google Scholar] [CrossRef]
- Hemmati, A.; Oterkus, E. Semi-Active Structural Control of Offshore Wind Turbines Considering Damage Development. J. Mar. Sci. Eng. 2018, 6, 102. [Google Scholar] [CrossRef] [Green Version]
- Yalla, S.K.; Kareem, A.; Kantor, J.C. Semi-active tuned liquid column dampers for vibration control of structures. J. Eng. Struct. 2001, 23, 1449–1479. [Google Scholar] [CrossRef]
- Karimi, H.R.; Zapateiro, M.; Luo, N. Semiactive vibration control of offshore wind turbine towers with tuned liquid column dampers using H∞ output feedback control. In Proceedings of the IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010; pp. 2245–2249. [Google Scholar]
- Luo, N.; Bottasso, C.L.; Karimi, H.; Zapateiro, M. Semiactive Control for Floating Offshore Wind Turbines Subject to Aero-hydro Dynamic Loads. In Proceedings of the International Conference on Renewable Energies and Power Quality, Las Palmas de Gran Canaria, Spain, 13–15 April 2011. [Google Scholar]
- Caterino, N.; Georgakis, C.T.; Spizzuoco, M.; Occhiuzzi, A. Design and calibration of a semi-active control logic to mitigate structural vibrations in wind turbines. Smart Struct. Syst. 2016, 18, 75–92. [Google Scholar] [CrossRef]
- Shen, N.; Chen, L.; Liu, J.; Wang, L.; Tao, T.; Wu, D.; Chen, R. A Review of Global Navigation Satellite System (GNSS)-Based Dynamic Monitoring Technologies for Structural Health Monitoring. Remote Sens. 2019, 11, 1001. [Google Scholar] [CrossRef] [Green Version]
- Chmielewski, T.; Górski, P. Full-scale investigations of civil engineering structures using GPS. In Advances in Civil Engineering and Building Materials, 4th ed.; CRC Press: London, UK, 2015; pp. 171–175. [Google Scholar]
- Xiong, C.; Niu, Y. Investigation of the dynamic behavior of a super high-rise structure using RTK-GNSS technique. KSCE J. Civ. Eng. 2019, 23, 654–665. [Google Scholar] [CrossRef]
- Xiong, C.; Niu, Y.; Wang, Z.; Yuan, L. Dynamic monitoring of a super high-rise structure based on GNSS-RTK technique combining CEEMDAN and wavelet threshold analysis. Eur. J. Environ. Civ. Eng. 2019, 23, 1–21. [Google Scholar] [CrossRef]
- Celebi, M. GPS in dynamic monitoring of long-period structures. Soil Dyn. Earthq. Eng. 2000, 20, 477–483. [Google Scholar] [CrossRef]
- Fuggini, C. Using Satellites Systems for Structural Monitoring: Accuracy, Uncertainty and Reliability, Civil Engineering VIII Nuova Serie (XXII Ciclo). Ph.D. Thesis, Università di Pavia, Pavia, Italy, 2009. [Google Scholar]
- Im, S.B.; Hurlebaus, S.; Kang, Y.J. Summary Review of GPS Technology for Structural Health Monitoring. J. Struct. Eng. 2013, 139, 1653–1664. [Google Scholar] [CrossRef]
- Kaloop, M.; Elbeltagi, E.; Hu, J.; Elrefai, A. Recent Advances of Structures Monitoring and Evaluation Using GPS-Time Series Monitoring Systems: A Review. ISPRS Int. J. Geo-Inf. 2017, 6, 382. [Google Scholar] [CrossRef] [Green Version]
- Lovse, J.W.; Teskey, W.F.; Lachapelle, G.; Cannon, M.E. Dynamic deformation monitoring of tall structure using GPS technology. J. Surv. Eng. 1995, 121, 35–40. [Google Scholar] [CrossRef]
- Ashkenazi, V.; Dodson, A.H.; Moore, T.; Roberts, G.W. Real time OTF GPS monitoring of the Humber Bridge. Surv. World 1996, 4, 26–28. [Google Scholar]
- Ashkenazi, V.; Roberts, G.W. Experimental monitoring of the Humber bridge using GPS. In Proceedings of the Institution of Civil Engineers-civil Engineering; Thomas Telford-ICE Virtual Library: London, UK, 1997; Volume 120, pp. 177–182. [Google Scholar]
- Yu, J.; Meng, X.; Shao, X.; Yan, B.; Yang, L. Identification of dynamic displacements and modal frequencies of a medium-span suspension bridge using multimode GNSS processing. Eng. Struct. 2014, 81, 432–443. [Google Scholar] [CrossRef]
- Wanninger, L. Introduction to network RTK. In International Association to Geodesy Meeting; Working Group; 2004; Volume 4. [Google Scholar]
- Kaplan, E.D.; Hegarty, C.J. Understanding GPS/GNSS: Principles and applications. In GNSS Technology Applications Series; Artech House Publisher: London, UK, 2017. [Google Scholar]
- Leick, A.; Rapoport, L.; Tatarnikov, D. GPS Satellite Surveying; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Mostböck, A.; Petryna, Y. Structural vibration monitoring of wind turbines. In Proceedings of the 9th International Conference on Structural Dynamics EURODYN 2014, Porto, Portugal, 30 June–2 July 2014. [Google Scholar]
- Borre, K.; Akos, D.M.; Bertelsen, N.; Rinder, P.; Jensen, S.H. A Software-Defined GPS and Galileo Receiver: A Single-Frequency Approach; Springer Science & Business Media: Berlin, Germany, 2007. [Google Scholar]
- Strang, G.; Borre, K. Linear Algebra, Geodesy, and GPS; Wellesley-Cambrdige Press: Wellesley, MA, USA, 1997. [Google Scholar]
- Marucci, A.; Colantoni, A.; Zambon, I.; Egidi, G. Precision farming in hilly areas: The use of network RTK in GNSS technology. Agriculture 2017, 7, 60. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Feng, Y. Integrity determination of RTK solutions in precision farming applications. In Proceedings of the Surveying and Spatial Sciences Institute Biennial International Conference 2009; Surveying and Spatial Sciences Institute: Adelaide Convention Centre, Adelaide, Australia, 2009. [Google Scholar]
- Wang, D.; Meng, X.; Gao, C.; Pan, S.; Chen, Q. Multipath extraction and mitigation for bridge deformation monitoring using a single-difference model. Adv. Space Res. 2017, 60, 2882–2895. [Google Scholar] [CrossRef]
- Pugliano, G.; Robustelli, U.; Rossi, F.; Santamaria, R. A new method for specular and diffuse pseudorange multipath error extraction using wavelet analysis. GPS Solut. 2016, 20, 499–508. [Google Scholar] [CrossRef]
- Cutugno, M.; Robustelli, U.; Pugliano, G. Low-cost GNSS software receiver performance assessment. Geosciences (Switzerland) 2020, 10, 79. [Google Scholar] [CrossRef] [Green Version]
- Robustelli, U.; Pugliano, G. Assessment of pseudorange measurements of Galileo FOC satellites with incorrect highly eccentric orbits. AIP Conf. Proc. 2019, 2116, 280005. [Google Scholar]
- Robustelli, U.; Pugliano, G. Galileo single point positioning assessment including FOC satellites in eccentric orbits. Remote Sens. 2019, 11, 1555. [Google Scholar] [CrossRef] [Green Version]
- Robustelli, U.; Benassai, G.; Pugliano, G. Signal in space error and ephemeris validity time evaluation of milena and doresa galileo satellites. Sensors (Switzerland) 2019, 19, 1786. [Google Scholar] [CrossRef] [Green Version]
- Robustelli, U.; Pugliano, G. Code multipath analysis of Galileo FOC satellites by time-frequency representation. Appl. Geomat. 2019, 11, 69–80. [Google Scholar] [CrossRef]
- Robustelli, U.; Benassai, G.; Pugliano, G. Accuracy evaluation of doresa and milena galileo satellites broadcast ephemerides. In Proceedings of the 2018 IEEE International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea 2018), Bari, Italy, 8–10 October 2019; pp. 217–221. [Google Scholar]
- Angrisano, A.; Gaglione, S.; Gioia, C.; Robustelli, U.; Vultaggio, M. Giove satellites pseudorange error assessment. J. Navig. 2012, 65, 29–40. [Google Scholar] [CrossRef]
- Galileo, I.C.D. Galileo Open Service, Signal in Space Interface Control Document (OS SIS ICD). Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo-OS-SIS-ICD.pdf (accessed on 14 February 2020).
- Psimoulis, P.; Pytharouli, S.; Karambalis, D.; Stiros, S. Potential of Global Positioning System (GPS) to measure frequencies of oscillations of engineering structures. J. Sound Vib. 2008, 318, 606–623. [Google Scholar] [CrossRef]
- Yi, T.-H.; Li, H.-N.; Gu, M. Experimental assessment of high-rate GPS receivers for deformation monitoring of bridge. Measurement 2013, 46, 420–432. [Google Scholar] [CrossRef]
- Leica Geosystems. Available online: https://leica-geosystems.com/-/media/files/leicageosystems/products/datasheets/leica_gm30_ds_en.ashx (accessed on 20 March 2020).
- JAVAD GNSS. Available online: http://download.javad.com/sheets/Delta-3_Datasheet.pdf (accessed on 20 March 2020).
- NavCom Technology, Inc. Available online: https://www.navcomtech.com/navcom_en_US/docs/download_center/data_sheets/current/datasheet_SF3050_20140609a_lowres.pdf (accessed on 20 March 2020).
- GPS & GNSS Equipment, Products and Solutions. Available online: https://www.novatel.com/assets/Documents/Papers/PwrPak7D-PS.pdf (accessed on 20 March 2020).
- Septentrio | Satellite Positioning for Industrial Applications. Available online: https://www.septentrio.com/en/products/gnss-receivers/rover-base-receivers/integrated-gnss-receivers/asterxsb (accessed on 20 March 2020).
- Sokkia Americas/Oceania. Available online: https://us.sokkia.com/sites/default/files/product/downloads/sokkia_gnr5_brochure_sok_1029_revd_sm.pdf (accessed on 20 March 2020).
- Topcon. Available online: https://www.topconpositioning.com/sites/default/files/product_files/mr-2_broch_7010_2211_reva_sm.pdf (accessed on 20 March 2020).
- Trimble - Transforming the Way the World Works. Available online: https://geospatial.trimble.com/products-and-solutions/r9s# (accessed on 20 March 2020).
- Chen, J.; Georgakis, C.T. Tuned rolling-ball dampers for vibration control in wind turbines. J. Sound Vib. 2013, 332, 5271–5282. [Google Scholar] [CrossRef]
- Nuzzo, I.; Caterino, N.; Maddaloni, G.; Occhiuzzi, A. Smart hybrid isolation of a case study highway bridge exploiting seismic early warning information. Eng. Struct. 2017, 147, 134–147. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal | Carrier Frequency (MHz) |
|---|---|
| E1 | 1575.420 |
| E6 | 1278.750 |
| E5 | 1191.795 |
| E5a | 1176.450 |
| E5b | 1207.140 |
| Manufacturer | Receiver Model | RTK Position Accuracy (RMS) | Max Sampling Rate | |
|---|---|---|---|---|
| Horizontal | Vertical | (Hz) | ||
| Leica [50] | GM30 | 8 mm + 1 ppm | 15 mm + 1 ppm | 50 |
| Javad [51] | Delta-3 | 10 mm + 1 ppm | 15 mm + 1 ppm | 100 |
| Navcom [52] | SF-3050 | 10 mm + 0.5 ppm | 20 mm + 1 ppm | 100 |
| Novatel [53] | PwrPak7D | 10 mm + 1 ppm | - | 100 |
| Septentrio [54] | AsteRx SB | 6 mm + 0.5 ppm | 10 mm + 1 ppm | 100 |
| Sokkia [55] | GNR5 | 5 mm + 0.5 ppm | 10 mm + 0.8 ppm | 100 |
| Topcon [56] | MR-2 | 5 mm + 0.5 ppm | 10 mm + 0.8 ppm | 100 |
| Trimble [57] | R9s | 8 mm + 1 ppm | 15 mm + 1 ppm | 20 |
| Maximum Base Stress [MPa] | Maximum Top Displacement [mm] | No. of State Changes (On/Off) | Maximum Base Rotation [rad] | |
|---|---|---|---|---|
| Fixed base | 90 | 1320 | - | - |
| SA @1000 Hz | 14 | 752 | 1648 | 0.0054 |
| SA @700 Hz | 16 | 730 | 1782 | 0.0051 |
| SA @500 Hz | 15 | 756 | 1158 | 0.0054 |
| SA @300 Hz | 22 | 840 | 1050 | 0.0061 |
| SA @100 Hz | 22 | 731 | 366 | 0.0053 |
| SA @70 Hz | 34 | 703 | 260 | 0.0049 |
| SA @50 Hz | 36 | 656 | 220 | 0.0046 |
| SA @20 Hz | 40 | 685 | 104 | 0.0049 |
| SA @10 Hz | 45 | 659 | 62 | 0.0052 |
| Load Case vs. Full EOG | σmax, SA/σmax, FB | xmax, SA/xmax, FB |
|---|---|---|
| 50% | 16%–39% | 36%–38% |
| 75% | 15%–47% | 34%–55% |
| 100% | 15%–50% | 50%–64% |
| Maximum Base Stress [MPa] | Maximum Top Displacement [mm] | No. of State Changes (On/Off) | Maximum Base Rotation [rad] | |
|---|---|---|---|---|
| Fixed base | 90 | 1320 | - | - |
| SA–no latency | 14 | 753 | 1648 | 0.0054 |
| SA–lat. 10 ms | 22 | 731 | 366 | 0.0053 |
| SA–lat. 20 ms | 36 | 656 | 220 | 0.0046 |
| SA–lat. 30 ms | 33 | 701 | 156 | 0.0051 |
| SA–lat. 50 ms | 39 | 685 | 104 | 0.0049 |
| SA–lat. 60 ms | 76 | 1019 | 114 | 0.0050 |
| SA–lat. 70 ms | 49 | 772 | 86 | 0.0056 |
| SA–lat. 80 ms | 38 | 700 | 70 | 0.0052 |
| SA–lat. 100 ms | 45 | 659 | 62 | 0.0052 |
| Load Case vs. Full EOG | σmax, SA/σmax, FB | xmax, SA/xmax, FB |
|---|---|---|
| 50% | 24%–42% | 37%–39% |
| 75% | 21%–68% | 34%–61% |
| 100% | 25%–85% | 50%–77% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caterino, N.; Pugliano, G.; Spizzuoco, M.; Robustelli, U. Variable Dampers to Mitigate Structural Demand to Wind Turbines: The Role of the Monitoring System Features for the Effectiveness of the Control Strategy. Appl. Sci. 2020, 10, 2498. https://doi.org/10.3390/app10072498
Caterino N, Pugliano G, Spizzuoco M, Robustelli U. Variable Dampers to Mitigate Structural Demand to Wind Turbines: The Role of the Monitoring System Features for the Effectiveness of the Control Strategy. Applied Sciences. 2020; 10(7):2498. https://doi.org/10.3390/app10072498
Chicago/Turabian StyleCaterino, Nicola, Giovanni Pugliano, Mariacristina Spizzuoco, and Umberto Robustelli. 2020. "Variable Dampers to Mitigate Structural Demand to Wind Turbines: The Role of the Monitoring System Features for the Effectiveness of the Control Strategy" Applied Sciences 10, no. 7: 2498. https://doi.org/10.3390/app10072498
APA StyleCaterino, N., Pugliano, G., Spizzuoco, M., & Robustelli, U. (2020). Variable Dampers to Mitigate Structural Demand to Wind Turbines: The Role of the Monitoring System Features for the Effectiveness of the Control Strategy. Applied Sciences, 10(7), 2498. https://doi.org/10.3390/app10072498