
Static Balancing Ability and Lower Body Kinematics Examination of Hungarian Folk Dancers: A Pilot Study Investigating the “Kalocsai Mars” Dance Sequence


Abstract
:1. Introduction
2. Materials and Methods
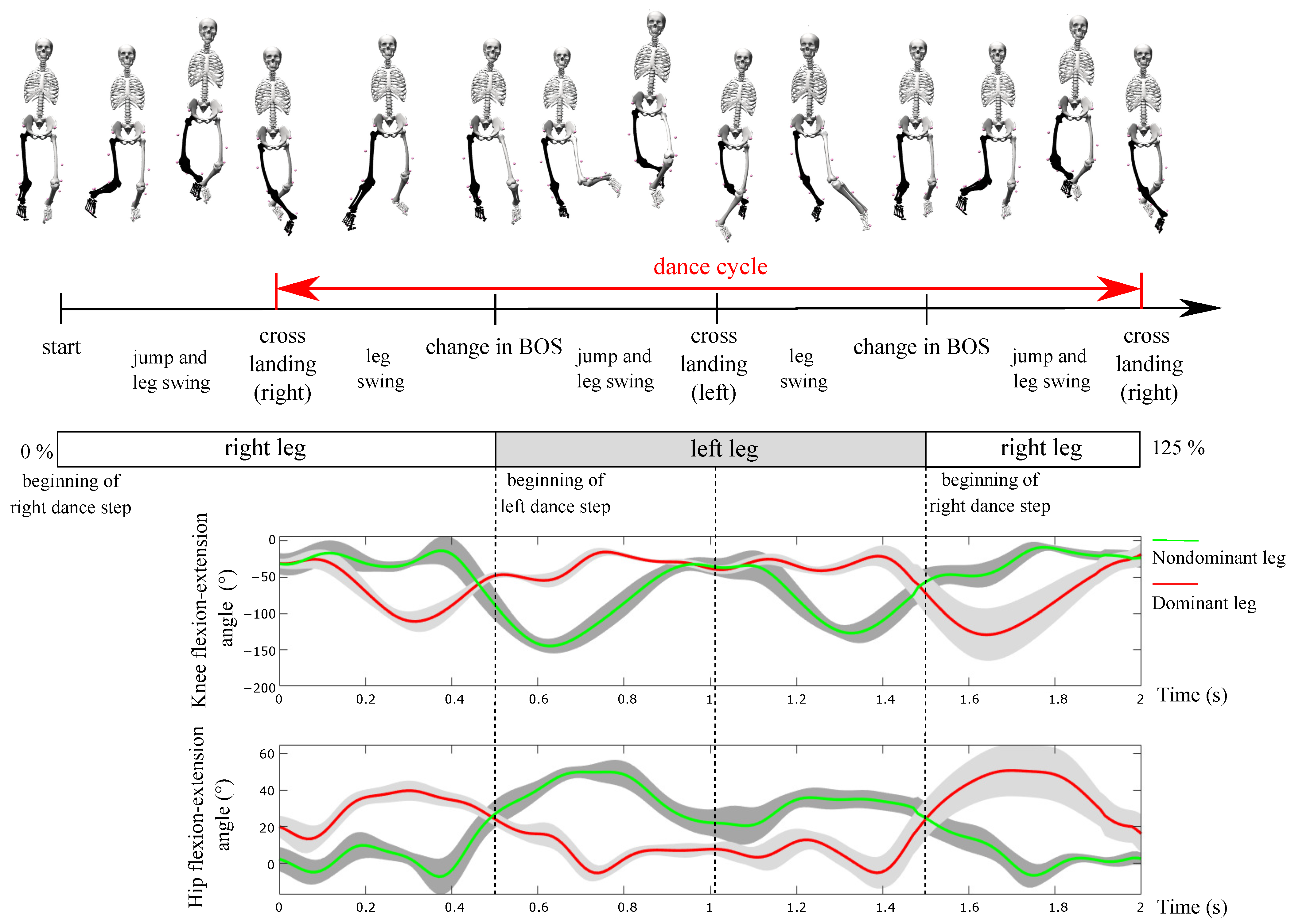
2.1. Examined Motion
2.2. Subjects
2.3. Experimental Setup
2.4. Experimental Procedure
2.5. Data Processing
2.6. Statistical Analysis
3. Results
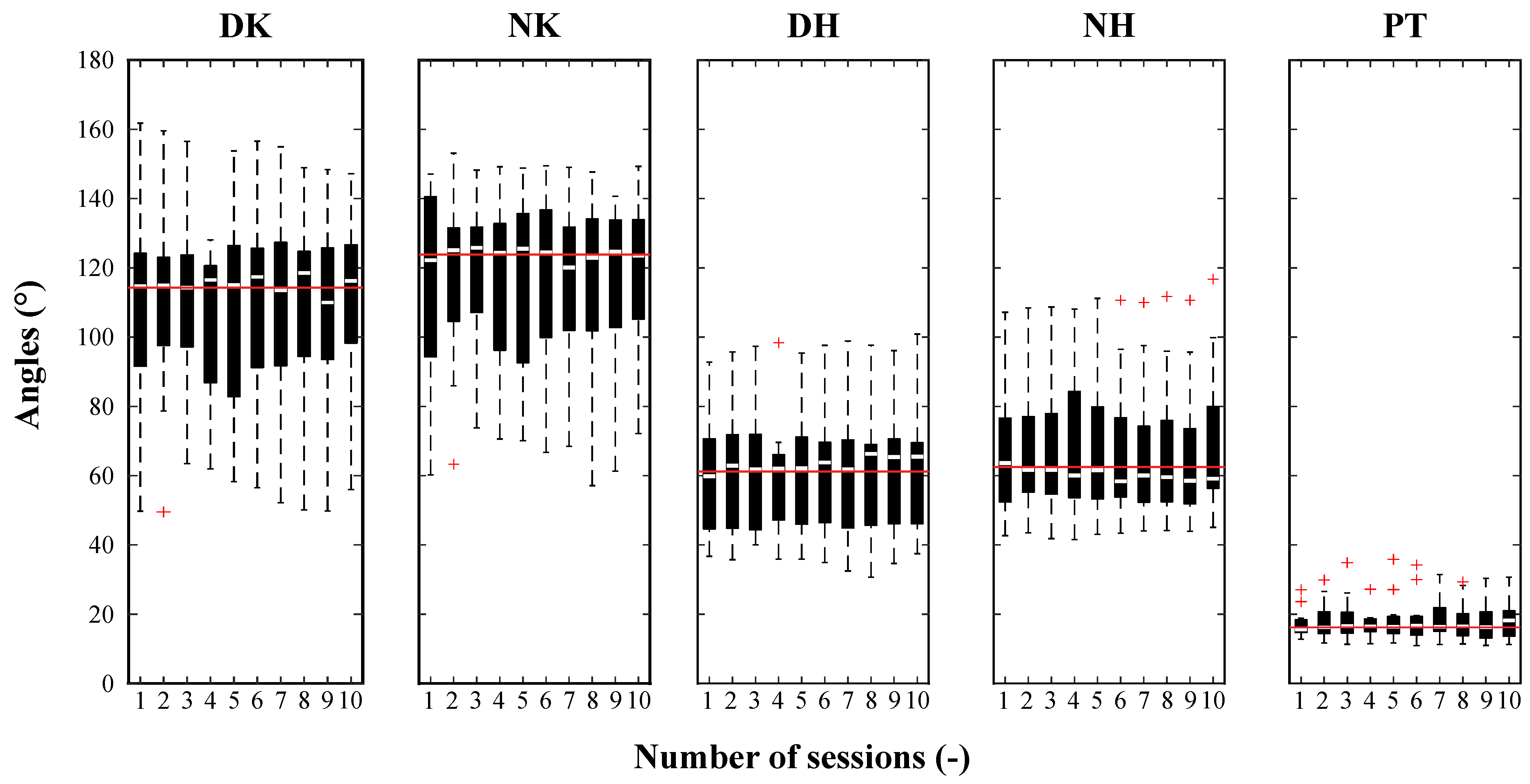
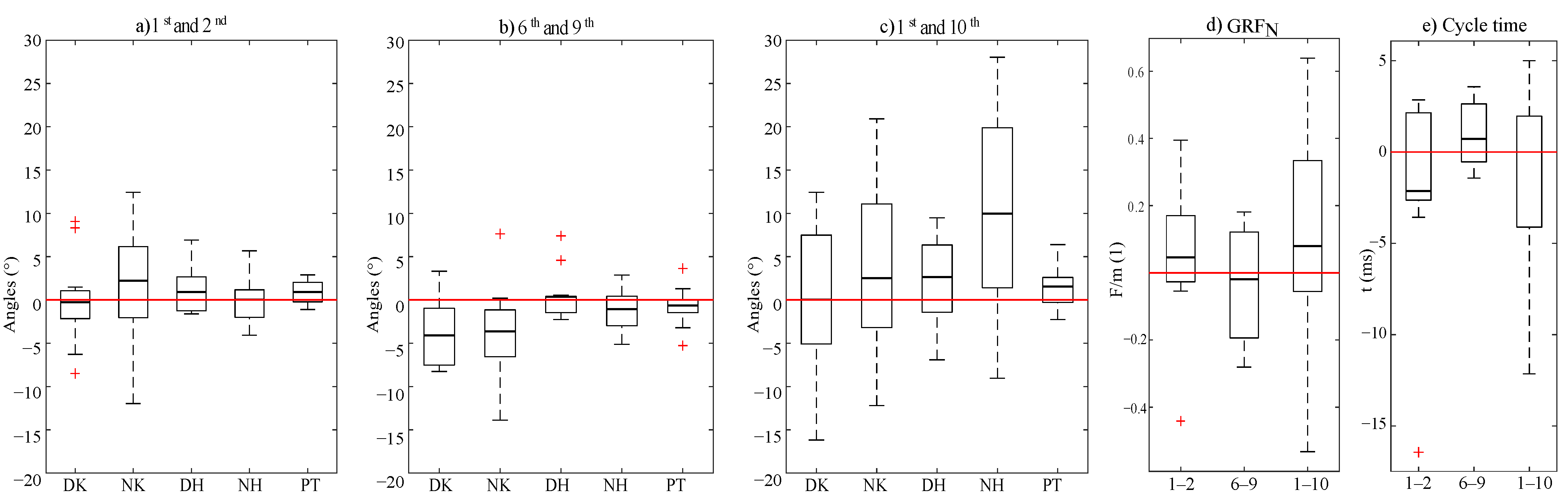
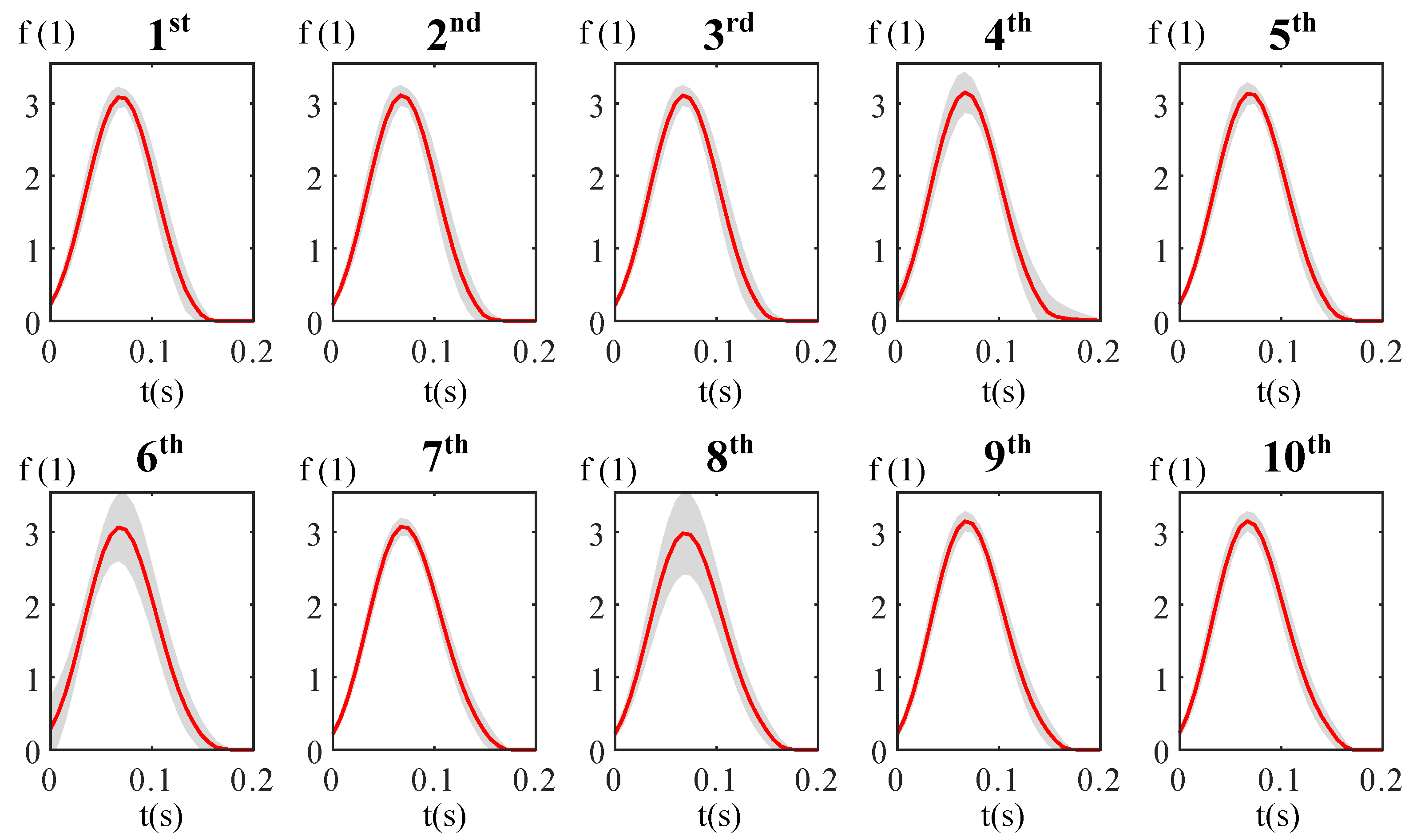
3.1. Results of the Motion Analysis
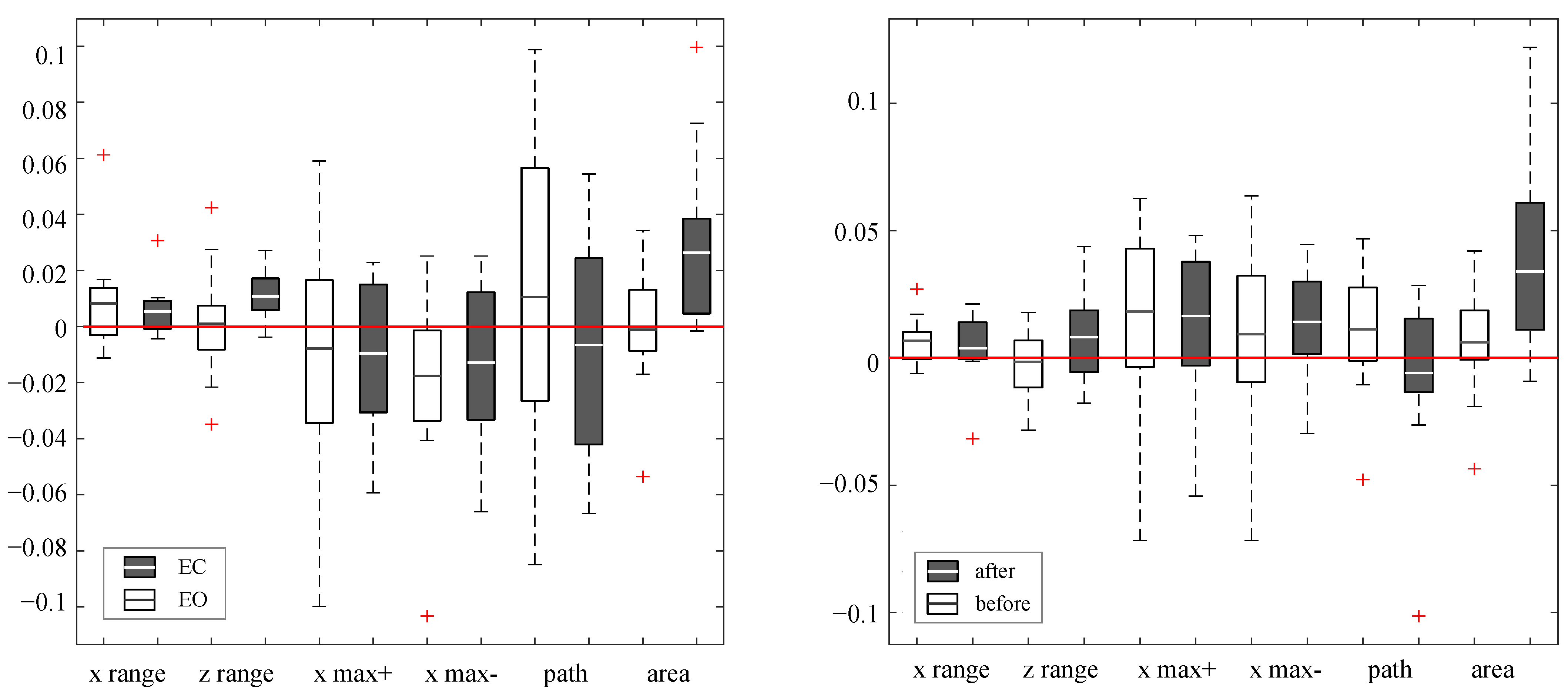
3.2. Results of the Balance Test Data
4. Discussion
4.1. Discussion of the Motion Analysis
4.2. Discussion of the Balance Test Data
4.3. Limitations of This Study
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ANOVA | Analysis of variance |
| BOS | Base of support |
| COP | Center of pressure |
| CV | Coefficient of variation |
| DK | Dominant knee flexion-extension angle |
| DH | Dominant hip flexion-extension angle |
| EO | Eyes opened |
| EC | Eyes closed |
| GFR | Ground reaction force |
| NK | Nondominant knee flexion-extension angle |
| NH | Nondominant hip flexion-extension angle |
| PT | Pelvis tilt angle in the sagittal plane |
| ROM | Range of motion |
References
- Felföldi, L. Folk dance research in Hungary: Relations among theory, fieldwork and the archive. In Dance in the Field; Springer: Berlin/Heidelberg, Germany, 1999; pp. 55–70. [Google Scholar]
- Diószegi, L. Historic moments of hungarian folk dance: From the Gyöngyösbokréta to the dance house movement. Hung. Stud. 2008, 22, 3–8. [Google Scholar] [CrossRef] [Green Version]
- Long, M. Modeling and analysis of knee joint impact damage in triple jump manipulators based on finite element method. Int. J. Model. Simul. Sci. Comput. 2019, 10, 1950030. [Google Scholar] [CrossRef]
- Wang, M.L.; Peng, Z.X. Wear in human knees. Biosurface Biotribol. 2015, 1, 98–112. [Google Scholar] [CrossRef] [Green Version]
- Wild, C.Y.; Grealish, A.; Hopper, D. Lower Limb and Trunk Biomechanics After Fatigue in Competitive Female Irish Dancers. J. Athl. Train. 2017, 52, 643–648. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kadel, N. Foot and Ankle Problems in Dancers. Phys. Med. Rehabil. Clin. N. Am. 2014, 25, 829–844. [Google Scholar] [CrossRef] [PubMed]
- Fuller, M.; Moyle, G.M.; Hunt, A.P.; Minett, G.M. Injuries during transition periods across the year in pre-professional and professional ballet and contemporary dancers: A systematic review and meta-analysis. Phys. Ther. Sport 2020, 44, 14–23. [Google Scholar] [CrossRef]
- Cahalan, R.; Kearney, P.; Ni Bhriain, O.; Redding, E.; Quin, E.; McLaughlin, L.C.; O’Sullivan, K. Dance exposure, wellbeing and injury in collegiate Irish and contemporary dancers: A prospective study. Phys. Ther. Sport 2018, 34, 77–83. [Google Scholar] [CrossRef]
- Chang, M.; Halaki, M.; Adams, R.; Cobley, S.; Lee, K.Y.; O’Dwyer, N. An Exploration of the Perception of Dance and Its Relation to Biomechanical Motion: A Systematic Review and Narrative Synthesis. J. Danc. Med. Sci. 2016, 20, 127–136. [Google Scholar] [CrossRef]
- Quanbeck, A.E.; Russell, J.A.; Handley, S.C.; Quanbeck, D.S. Kinematic analysis of hip and knee rotation and other contributors to ballet turnout. J. Sport. Sci. 2017, 35, 331–338. [Google Scholar] [CrossRef]
- Harwood, A.; Campbell, A.; Hendry, D.; Ng, L.; Wild, C.Y. Differences in lower limb biomechanics between ballet dancers and non-dancers during functional landing tasks. Phys. Ther. Sport 2018, 32, 180–186. [Google Scholar] [CrossRef]
- Chang, M.; O’Dwyer, N.; Adams, R.; Cobley, S.; Lee, K.Y.; Halaki, M. Whole-body kinematics and coordination in a complex dance sequence: Differences across skill levels. Hum. Mov. Sci. 2020, 69, 102564. [Google Scholar] [CrossRef]
- da Silveira Costa, M.S.; de Sá Ferreira, A.; Felicio, L.R. Static and dynamic balance in ballet dancers: A literature review. Fisioter. Pesqui 2013, 20, 299–305. [Google Scholar]
- Kozinc, Ž.; Šarabon, N. Transient body sway characteristics during single-leg quiet stance in ballet dancers and young adults. J. Biomech. 2021, 115, 110195. [Google Scholar] [CrossRef]
- Fronczek–Wojciechowska, M.; Padula, G.; Kowalska, J.; Galli, M.; Livatino, S.; Kopacz, K. Static balance and dynamic balance related to rotational movement in ballet dance students. Int. J. Perform. Anal. Sport 2016, 16, 801–816. [Google Scholar] [CrossRef] [Green Version]
- Pau, M.; Laconi, I.; Leban, B. Effect of fatigue on postural sway in sport-specific positions of young rhythmic gymnasts. Sport Sci. Health 2021, 17, 145–152. [Google Scholar] [CrossRef]
- Video of the Examined Dance Step. Available online: https://youtu.be/goCMP8qeEA8 (accessed on 12 July 2021).
- van Melick, N.; Meddeler, B.M.; Hoogeboom, T.J.; Nijhuis-van der Sanden, M.W.G.; van Cingel, R.E.H. How to determine leg dominance: The agreement between self-reported and observed performance in healthy adults. PLoS ONE 2017, 12, e0189876. [Google Scholar] [CrossRef] [Green Version]
- Nagymáté, G.; Kiss, R.M. Motion capture system validation with surveying techniques. Mater. Today Proc. 2018, 5, 26501–26506. [Google Scholar] [CrossRef] [Green Version]
- Skeleton Tracking—NaturalPoint Product Documentation Ver 2.2. Available online: https://v22.wiki.optitrack.com/index.php (accessed on 10 June 2021).
- Scoppa, F.; Capra, R.; Gallamini, M.; Shiffer, R. Clinical stabilometry standardization: Basic definitions—Acquisition interval—Sampling frequency. Gait Posture 2013, 37, 290–292. [Google Scholar] [CrossRef]
- Seth, A.; Hicks, J.L.; Uchida, T.K.; Habib, A.; Dembia, C.L.; Dunne, J.J.; Ong, C.F.; DeMers, M.S.; Rajagopal, A.; Millard, M.; et al. OpenSim: Simulating musculoskeletal dynamics and neuromuscular control to study human and animal movement. PLoS Comput. Biol. 2018, 14, e1006223. [Google Scholar] [CrossRef]
- Nagymáté, G. Stabilometric Parameter Analyses and Optical Based Motion Analysis. Ph.D. Thesis, Budapest University of Technology and Economics, Budapest, Hungary, 2019; p. 120. [Google Scholar]
- Nelson, L.S. The Anderson-Darling test for normality. J. Qual. Technol. 1998, 30, 298. [Google Scholar] [CrossRef]
- Pauw, K.D.; Roelands, B.; Cheung, S.S.; Geus, B.d.; Rietjens, G.; Meeusen, R. Guidelines to Classify Subject Groups in Sport-Science Research. Int. J. Sport. Physiol. Perform. 2013, 8, 111–122. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perrett, D.; Schaffer, J.; Piccone, A.; Roozeboom, M. Bonferroni adjustments in tests for regression coefficients. Mult. Linear Regres. Viewp. 2006, 32, 1–6. [Google Scholar]
- Chang, M.; O’Dwyer, N.; Adams, R.; Cobley, S.; Lee, K.Y.; Halaki, M. Whole-body angular momentum in a complex dance sequence: Differences across skill levels. Hum. Mov. Sci. 2019, 67, 102512. [Google Scholar] [CrossRef] [PubMed]
- Barbieri, F.A.; Penedo, T.; Simieli, L.; Barbieri, R.A.; Zagatto, A.M.; van Diëen, J.H.; Pijnappels, M.A.G.M.; Rodrigues, S.T.; Polastri, P.F. Effects of Ankle Muscle Fatigue and Visual Behavior on Postural Sway in Young Adults. Front. Physiol. 2019, 10, 643. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Description | Unit |
|---|---|---|
| Average cycle time | Average duration of one dance cycle | seconds (s) |
| Dominant knee joint angle (DK) | Dominant knee flexion-extension angle | degrees (°) |
| Nondominant knee joint angle (NK) | Nondominant knee flexion-extension angle | degrees (°) |
| Dominant hip flexion angle (DH) | Dominant hip flexion-extension angle | degrees (°) |
| Nondominant hip flexion angle (NH) | Nondominant hip flexion-extension angle | degrees (°) |
| Pelvis tilt (PT) | Pelvis tilt angle in sagittal plane | degrees (°) |
| Normalized ground reaction force (GRF) | Ground reaction force normalized by body weight | (1) |
| Parameter Name | Description | Unit |
|---|---|---|
| COP x range | The difference between the maximum and minimum coordinates of COP in the x anterior-posterior direction | (mm) |
| COP z range | The difference between the maximum and minimum coordinates of COP in the z medio-lateralis direction | (mm) |
| COP area | The area of the ellipse that contains of the data | (mm2) |
| COP x max + | Maximum deviation of COP in the x direction from the mean in the positive direction | (mm) |
| COP x max − | Maximum deviation of COP in the x direction from the mean in the negative direction | (mm) |
| Path of COP | The path of the COP during the measurement in the x-z plane | (mm) |
| Parameter Name | SumSq | DF | MeanSq | F | p-Value | |
|---|---|---|---|---|---|---|
| Avg of ROM of DK | 561.48 | 9 | 62.38 | 2.07 | 0.041 ** | 0.0032 |
| Avg of ROM of NK | 733.18 | 9 | 81.46 | 3.00 | 0.0038 ** | 0.0037 |
| Avg of ROM of PT | 39.28 | 9 | 4.36 | 1.88 | 0.066 * | 0.0068 |
| Avg of ROM of DH | 139.15 | 9 | 15.46 | 1.76 | 0.088 * | 0.0025 |
| Avg of ROM of NH | 249.70 | 9 | 27.74 | 2.82 | 0.006 ** | 0.0034 |
| CV of ROM of DK | 0.008 | 9 | 0.00098 | 0.91 | 0.517 | 0.0238 |
| CV of ROM of NK | 0.007 | 9 | 0.00082 | 0.73 | 0.679 | 0.0359 |
| CV of ROM of PT | 0.011 | 9 | 0.00125 | 0.93 | 0.497 | 0.0914 |
| CV of ROM of DH | 0.004 | 9 | 0.00052 | 1.36 | 0.216 | 0.0376 |
| CV of ROM of NH | 0.005 | 9 | 0.00056 | 0.97 | 0.466 | 0.053 |
| Max of the GRF | 0.097 | 9 | 0.01079 | 0.68 | 0.719 | 0.0019 |
| Avg of cycle time | 9 | 0.157 | 0.997 | 0.0719 |
| Parameter Name | Factor | SumSq | DF | MeanSq | F | p-Value |
|---|---|---|---|---|---|---|
| COP x range | before/after | 0.0005 | 1 | 0.0005 | 2.43 | 0.15 |
| EO/EC | 0.0003 | 1 | 0.0003 | 2.51 | 0.14 | |
| COP z range | before/after | 0.00037 | 1 | 0.0003 | 3.35 | 0.096 |
| EO/EC | 0.00012 | 1 | 0.00012 | 0.87 | 0.37 | |
| COP area | before/after | 1 | 2.40 | 0.151 | ||
| EO/EC | 1 | 0.54 | 0.47 | |||
| COP x max + | before/after | 0.0008 | 1 | 0.0008 | 2.61 | 0.13 |
| EO/EC | 0.0033 | 1 | 0.0033 | 11.93 | 0.006 ** | |
| COP x max − | before/after | 0.0025 | 1 | 0.0025 | 8.7 | 0.014 ** |
| EO/EC | 0.0015 | 1 | 0.0015 | 7.1 | 0.0236 ** | |
| Path of COP | before/after | 0.43 | 1 | 0.43 | 0.021 | 0.88 |
| EO/EC | 0.79 | 1 | 0.79 | 0.19 | 0.66 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Molnár, C.; Pálya, Z.; Kiss, R.M. Static Balancing Ability and Lower Body Kinematics Examination of Hungarian Folk Dancers: A Pilot Study Investigating the “Kalocsai Mars” Dance Sequence. Appl. Sci. 2021, 11, 8789. https://doi.org/10.3390/app11188789
Molnár C, Pálya Z, Kiss RM. Static Balancing Ability and Lower Body Kinematics Examination of Hungarian Folk Dancers: A Pilot Study Investigating the “Kalocsai Mars” Dance Sequence. Applied Sciences. 2021; 11(18):8789. https://doi.org/10.3390/app11188789
Chicago/Turabian StyleMolnár, Cecília, Zsófia Pálya, and Rita M. Kiss. 2021. "Static Balancing Ability and Lower Body Kinematics Examination of Hungarian Folk Dancers: A Pilot Study Investigating the “Kalocsai Mars” Dance Sequence" Applied Sciences 11, no. 18: 8789. https://doi.org/10.3390/app11188789
APA StyleMolnár, C., Pálya, Z., & Kiss, R. M. (2021). Static Balancing Ability and Lower Body Kinematics Examination of Hungarian Folk Dancers: A Pilot Study Investigating the “Kalocsai Mars” Dance Sequence. Applied Sciences, 11(18), 8789. https://doi.org/10.3390/app11188789