1. Introduction
Sea level variations in coastal areas affect—in a relevant way—the safety of people working on ports. In fact, these phenomena influence the so-called harbour waterside management (optimization of maritime transport, dock performances, vessel mooring, logistics operations, ship loading, maritime works, marine water quality and pollution control). Therefore, their knowledge and forecasting can be very useful in order to minimize the risk of accidents (e.g., stranding of ships) and the consequent environmental impact and economic losses [
1,
2,
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20].
The system described in this article starts from monitoring (or forecasting) sea level and meteorological parameters (mainly the atmospheric pressure) in harbours; then, sea-level values acquired or expected are passed as inputs to a software application which updates the bathymetric map of a basin and detects potentially dangerous situations for a certain ship at a given instant, with the aim of supporting local authorities and working organizations in optimizing harbour water management and port operations, mitigating risk due to sea-level variations and managing emergencies.
The software tool is able to update in real-time the bathymetric map of a harbour by downloading via Internet sea-level data acquired by meteo-mareographic stations working in ports; it can also read data stored in an archive to replicate the evolution of the bathymetry in the occasion of remarkable events occurred in the past, such as ship stranding or refloating; finally, as explained below, it is also able to make use of atmospheric pressure trends to estimate future sea-level changes named meteorological tides, which have to be added to the astronomical ones, that are periodic and well-known, to obtain the expected sea level and then the future real bathymetric map of a port.
In fact, the slow up-down motion of sea level in Mediterranean coastal areas is essentially due to tides that are mainly the sum of astronomical components (in particular the diurnal and the semidiurnal ones) due to gravitational attraction between Earth, Moon and Sun, and then periodic, well-known (through harmonic analysis) and foreseeable for each location by means of tide charts [
21].
In addition to them, an important role in determining tidal fluctuations can be played by meteorological components (due to atmospheric pressure perturbations), in particular, if they occur along with the astronomical ones. During the last ten years, “anomalous” tidal oscillations have been observed along Italian coasts. In particular, a meteorological tide (also named “meteo-tide”) is a geodetic adjustment of the sea surface resulting from a perturbation of atmospheric weight above a water basin (up and down sea level motion that compensates the Newtonian unbalance): an increase in atmospheric loading induces an outcoming seawater flux (low tide), while a decrease in atmospheric weight causes an incoming flux (high tide); therefore, sea level lowers with an atmospheric pressure rise, and rises with a pressure fall. This phenomenon depends on a lot of variables (e.g., the topography of the basin) so, unlike the previous phenomenon, it is not describable by a deterministic law: the statistical correlation between changes of atmospheric pressure (cause) and sea-level variations (effect) is estimated by analysing meteorological events (sea-level changes consequent to atmospheric pressure variations) that occur in a certain location for a long time interval. Once this correlation (named hydro-barometric transfer factor) is known, meteorological tides can be forecasted starting from the knowledge of atmospheric pressure variations [
22,
23,
24,
25,
26,
27,
28,
29,
30].
Finally, once astronomical and meteorological tides are both known, the expected global variation of sea level can be estimated as the algebraic sum of the two contributions and then passed as input to the software application that performs the updating of the bathymetry.
Here. we describe the results obtained by using this system in real situations in Livorno and Bari harbours, in Italy (see
Figure 1).
2. Materials and Methods
2.1. Bathymetry Updating and “Virtual Traffic Lights”
Here, we describe the software tool developed to update automatically the bathymetry of a basin (based on sea level measured or forecasted) and to implement the idea of virtual traffic lights (by means of comparison with two threshold levels); this represents a helpful graphical interface to support authorities in avoiding or managing critical situations by detecting hazardous areas [
31,
32,
33,
34,
35,
36,
37,
38,
39].
The initial condition (referred to time t0) of the processing procedure is the georeferenced bathymetric map of a port as it usually results from multibeam surveys; this represents the static bathymetry because it changes only after a new survey following variations of the basin topography, for instance, due to dredging operations or natural phenomena such as coastal erosion, sediment deposit, sea bottom subsidence.
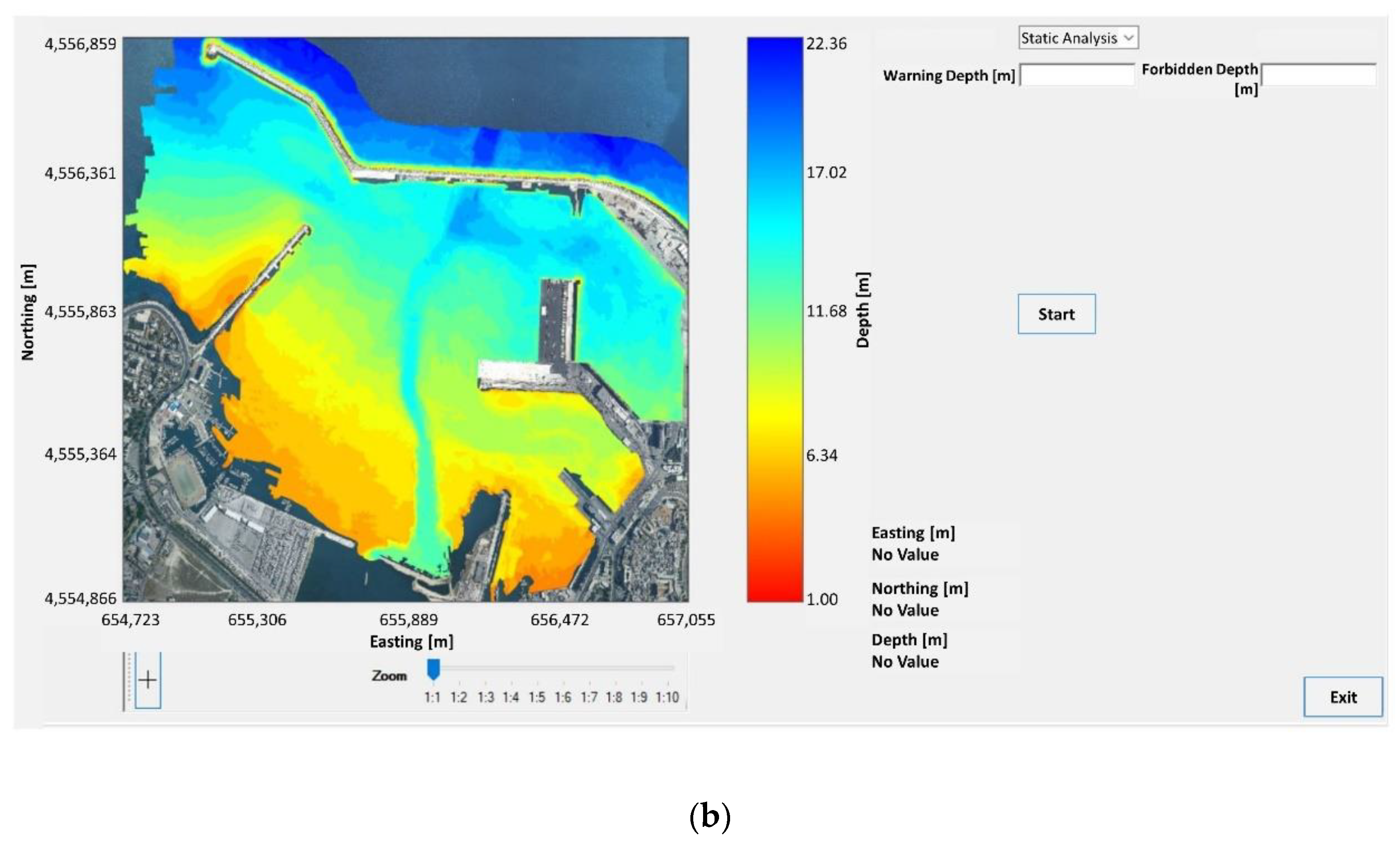
Figure 2a represents the bathymetric map of the port of Livorno, that extends over an area of approximately 18 [km
2]; the grid spacing is equal to 5 [m]; the coordinates are represented in UTM (Universal Transverse of Mercator coordinates, Zone 32T) and bottom depth values are referred to IGM’s 0 sea level (Italian Military Geographic Institute) with a resolution of 10
−2 [m]. On the contrary,
Figure 2b shows the map of Bari harbour (area of about 4.8 [km
2]; spatial resolution 1 [m]; UTM Zone 33T); bathymetric data have been kindly provided by Port Authorities of Livorno and Bari.
It is possible to set two thresholds, a lower and an upper level, variable from ship to ship depending on the draught of the vessel under monitoring, to divide the bathymetry into different areas represented by three colours: seafloor depth values smaller than the lower threshold (usually set equal to the vessel draught) identify zones that are forbidden for that vessel and are represented by red colour, while depth values greater than the upper threshold identify deep or allowed zones (green: bottom depth more than the upper threshold, in its turn greater than the ship draught: there is a wide under-keel clearance (the space between the lowest point of the vessel keel and the sea bottom under it)); finally, depth values between lower and upper values identify shallow or warning zones (yellow: a gradual transition from the green area to the red one, with bottom depth values between the lower threshold and the upper one: there is a little space between the vessel keel and the seafloor). The partition of the harbour area into three different colours shows prohibited, allowed or warning zones for that vessel and so it implements the idea of virtual traffic lights customized for each ship: in a hypothetical operational scenario, the choice of thresholds would be a task of end users (port communities).
For example, regarding the port of Livorno, for a ship having a draught of 10 m thresholds could be set at 10 and 11 m, respectively; it follows the representation shown in
Figure 3a: therefore, for that ship, we consider as forbidden (red) the areas with bottom depth less than 10 m, warning areas (yellow) those in which the depth is between 10 and 11 m, and allowed areas (green) those where the depth is greater than 11 m. This is the so-called static analysis (the map does not change over time). In
Figure 3b the same map is shown but after different thresholds have been chosen: for a hypothetical ship with a greater draught than the previous case, e.g., 11.5 m, choosing threshold levels set at 11.5 and 12.5 m, respectively, leads to expand the red (prohibited) zone and to reduce the green (allowed) area: we consider as forbidden the zones with a seafloor depth of less than 11.5 m, warning areas those with a depth between 11.5 and 12.5 m, and allowed areas those with a depth greater than 12.5 m; obviously, for a ship with a deeper draught, a larger (red) area will be forbidden.
In
Figure 4 the bathymetric map of Bari harbour is represented, with threshold levels equal to 8 and 9 m in
Figure 4a and 9 and 10 m in
Figure 4b.
After this, sea level values can be added to the starting bottom depth to recalculate moment by moment the georeferenced bathymetric map and update the so-called dynamic bathymetry (variable over time). Mareographic signals can represent past measurements loaded from a dataset (to analyse bathymetry variations during past events of particular interest, e.g., vessel stranding or refloating) or real-time values transmitted by monitoring stations described in the
Section 2.2 (if we are observing the real-time evolution of the bathymetry), but it is also possible to load expected sea-level values resulting from the forecasting procedure described later in the
Section 2.3, in order to forecast a future bathymetric map.
Then, the division of the port map into green, yellow and red areas is updated maintaining the same threshold levels (e.g., for the same vessel considered in
Figure 4b, threshold levels remain constant at 9 and 10 m). Therefore, by varying sea level, an area that initially was prohibited (red), can become a warning (yellow) or allowed area (green) for that vessel, or vice versa. This represents the so-called dynamic analysis, because the real bathymetry varies over time, based on sea-level values loaded.
The processing procedure and the graphical interface of the application, running under the Windows operating system, have been developed using the C# language.
Figure 5 shows the block diagram of the algorithm.
2.2. Environmental Monitoring in Harbours
To perform environmental monitoring in Italian harbours, meteo-mareographic stations belonging to the National Tidegauge Network managed by ISPRA (Italian Institute for Environmental Protection and Research) are usually employed. Regarding this work, parameters have been acquired by the ISPRA’s measurement stations located in the ports of Livorno and Bari (see
Figure 6 and
Figure 7).
A typical measurement station includes several instruments to measure environmental parameters, and among them, the most important for the study described in this article are the hydrometer to acquire sea level and the barometer to measure atmospheric pressure; it is also equipped with a data acquisition system, an Internet connection and a solar panel to provide the power supply.
Sea level measurements are usually referred to IGM’s 0 level. Their typical resolution is 10−2 m. The hydrometer essentially consists of a radar transducer positioned above the sea surface. Microwave pulses are sent towards the water/air interface, then, since the speed of the electromagnetic radiation in the air, the time taken by the impulses on the round trip, and the position of the transducer with respect to IGM’s 0 level are known, the sea level value is calculated. A typical sampling interval to acquire tide data is greater than or equal to 10 min and, to avoid the disturbance induced by sea waves, the radar transducer is usually placed inside a still-pipe.
The atmospheric pressure, on the contrary, is measured by means of a barometer based on a capacitive silicon transducer. As the atmospheric pressure varies, both distances between the two plates and electrical capacitance change; measurements are usually made once every hour (atmospheric pressure is characterized by very low-frequency variations), with a typical resolution equal to 10−1 hPa (1 hPa is approximately equal to 1 mbar).
The date and the time of a monitoring station are usually referred to as UTC—Universal Time Coordinates.
Data acquired can be stored in a memory (to create a local data archive), downloaded in real-time via the Internet on a receiving station (e.g., to implement a remote data storage or to update the bathymetric map of the port), and made available on a website. Data shown in this work and other information regarding the measurement stations are available on
https://www.mareografico.it/ (accessed on 25 October 2021).
2.3. Forecasting Sea Level in Harbours
Meteo-tides are well-known in off-shore areas (the “inverted barometer” effect), where 1 hPa of atmospheric pressure change (cause) induces nearly 1 cm of sea-level variation (effect), but they need more study in coastal areas, where the shoreline prevents the displacement of the marine water mass along horizontal directions towards the coastline: the effect of this constraint is to amplify the vertical movement [
40,
41,
42,
43,
44,
45,
46,
47,
48,
49,
50,
51,
52,
53,
54,
55,
56,
57,
58,
59,
60,
61,
62].
Moreover, the correlation between atmospheric pressure and sea level (represented by means of the so-called hydrobarometric transfer factor J
ph) depends on a number of specific parameters for the location examined (overall the topography of the basin), therefore it cannot be described by means of a deterministic law valid everywhere but must be studied through a local observation of the phenomenon and subsequent statistical analysis. Therefore, the study of meteorological tides consists essentially in analysing events (sea-level variations consequent to atmospheric pressure changes) that occur in a given basin during a certain time interval (usually some years), to estimate the hydrobarometric transfer factor J
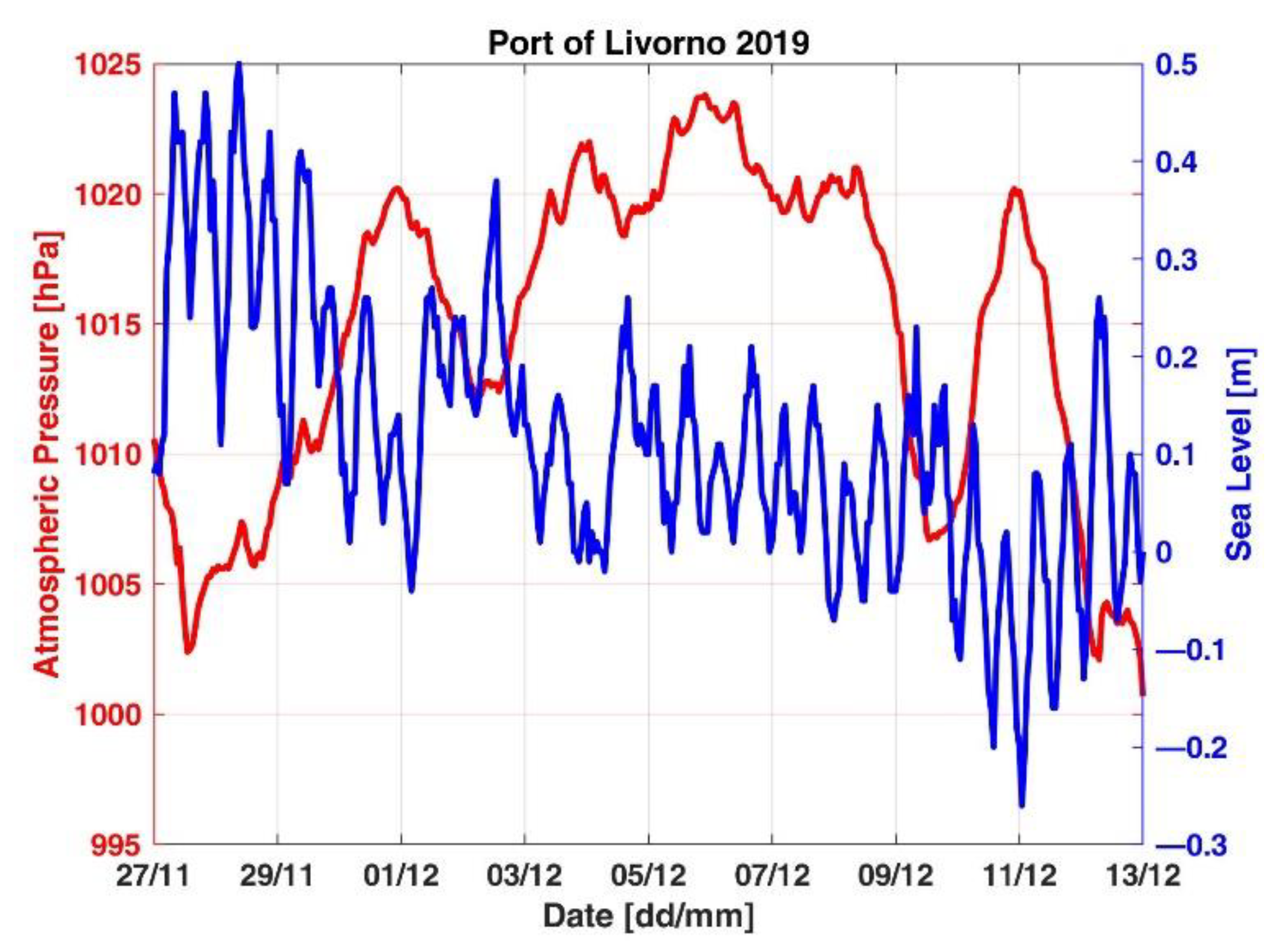
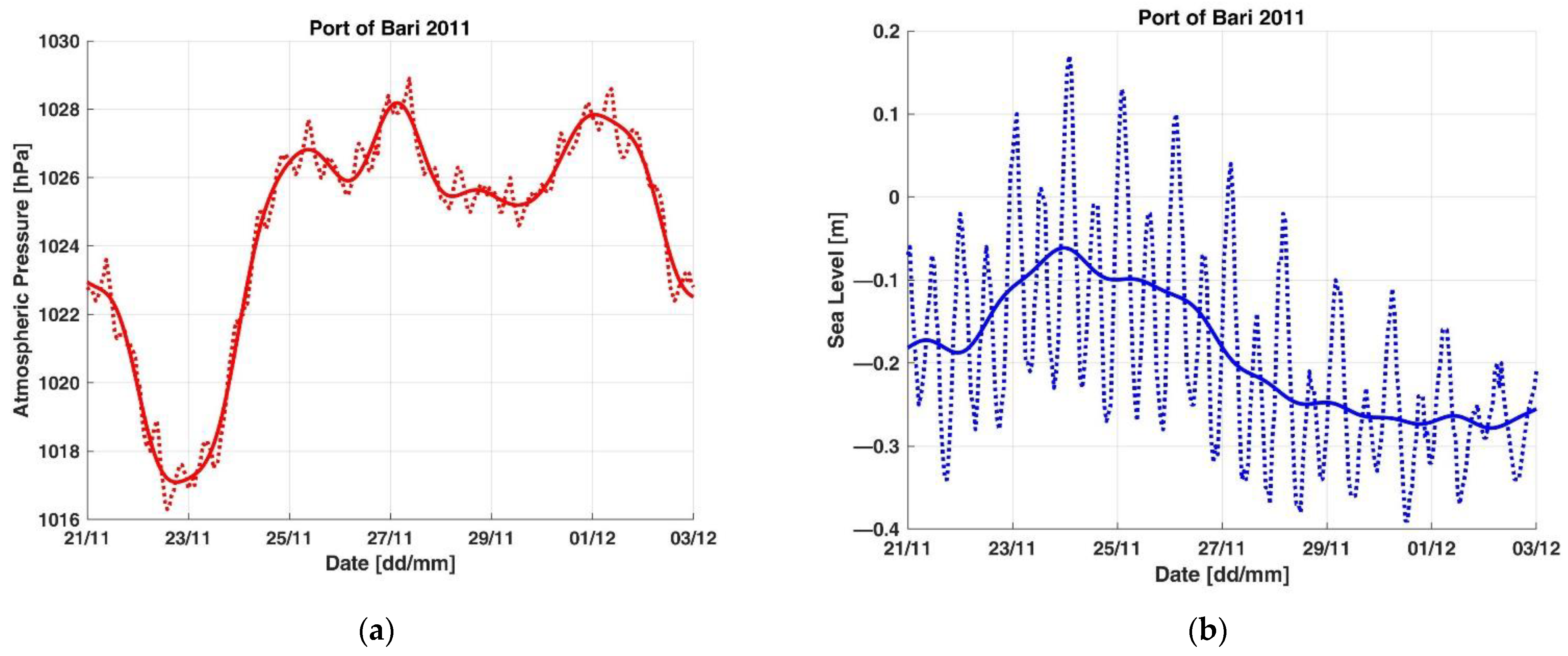
ph; the starting point is the monitoring of atmospheric pressure and sea level; for example, in
Figure 8 parameters observed in the port of Livorno from 27 November to 13 December 2019 are shown, while
Figure 9 refers to data acquired in Bari harbour from 15 to 23 May 2011.
Sea level acquired includes all the phenomena that contribute to its variations, above all astronomical (in particular diurnal and semidiurnal) and meteorological tides. Other short-term phenomena such as wind effect and storm surges are not taken into consideration in this study (only events occurring in the absence of wind were studied). To remove contributions different from the meteorological one, measurements are filtered appropriately taking advantage of the fact that astronomical tides are characterized by high frequencies; power spectral densities of atmospheric pressure and sea level acquired in the port of Livorno during 2019 are shown in
Figure 10: frequency components related to diurnal and semidiurnal tides are at about 1.2 and 2.3 · 10
−5 Hz, respectively;
Figure 11 shows the same quantities relating to the port of Bari in 2011.
Data are subjected to a Low Pass filtering that avoids diurnal and semidiurnal tides, which are the spectral components dashed in
Figure 10,
Figure 11,
Figure 12 and
Figure 13: only low-frequency components (slow variations), related to atmospheric pressure, survive the filtering (solid lines).
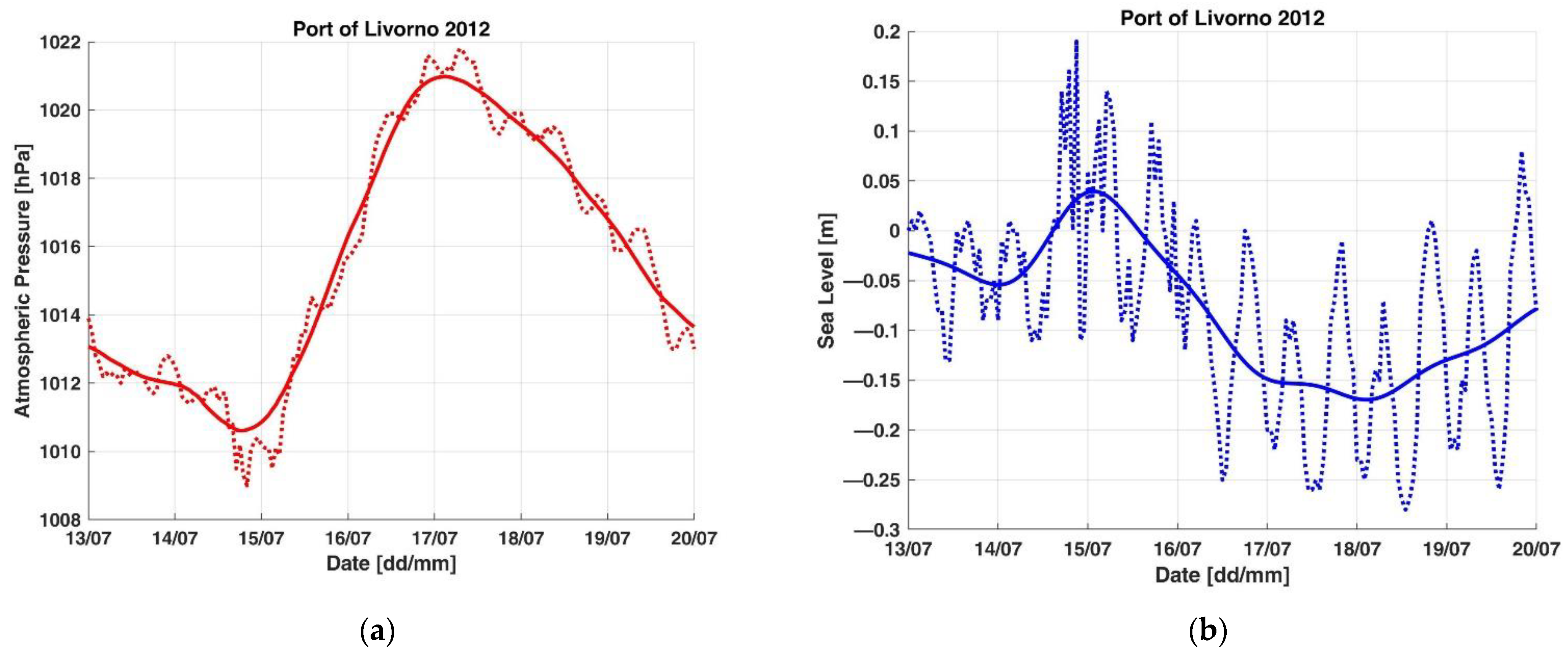
Regarding the period from 27 November to 13 December 2019 in Livorno, the filtered data shown in
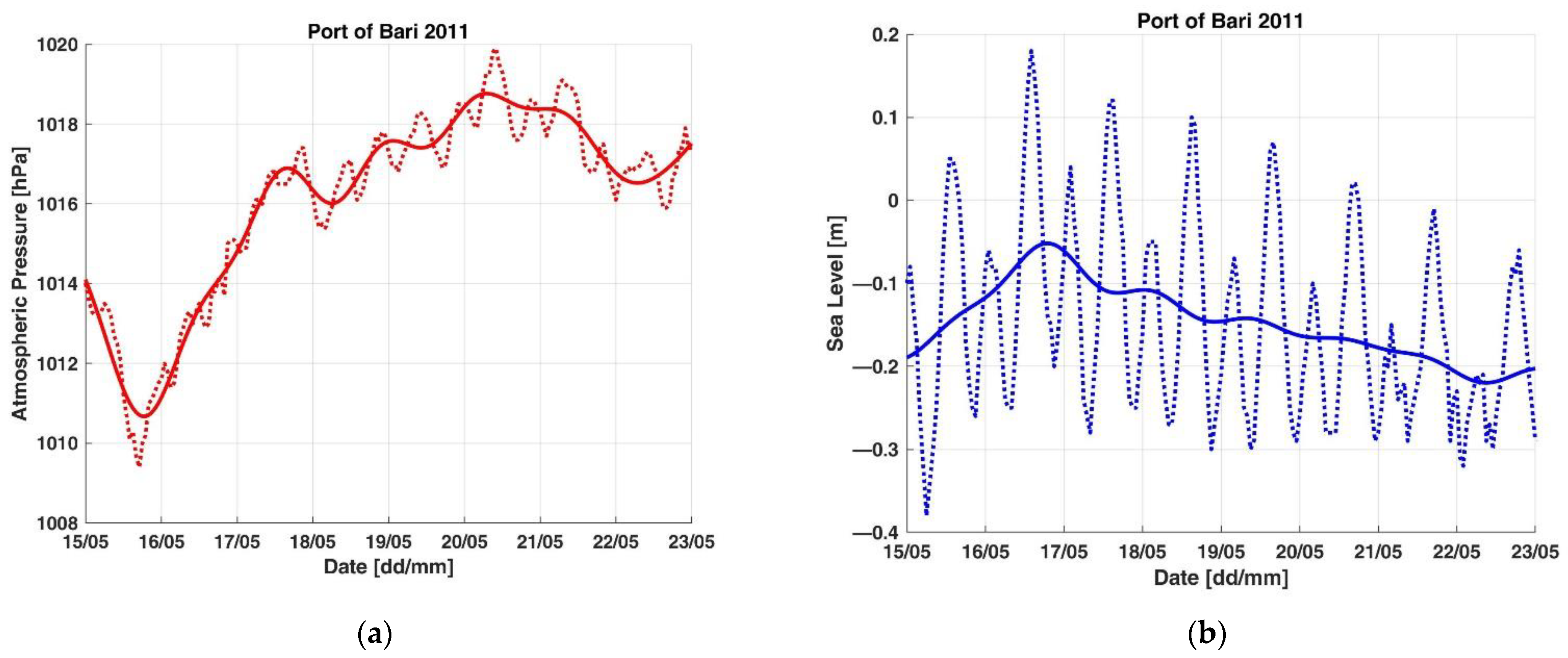
Figure 12 result, in which 19.5 hPa of atmospheric pressure increase in Δp (cause) induce nearly 45.2 cm of low meteorological tide Δh (height of tide wave, effect). As for filtered data from 15 to 23 May 2011 in Bari,
Figure 13 shows that an increase in Δp of 8.1 hPa in atmospheric pressure causes a decrease in Δh of nearly 16.8 cm in sea level.
The hydrobarometric transfer factor J
ph [cm·hPa
−1] is estimated for each event as:
expressed in absolute value, where Δh and Δp represent the change in sea level and atmospheric pressure, respectively; in these cases, we obtain a value of about 2.3 cm·hPa
−1 for the event in
Figure 12 and 2.1 cm·hPa
−1 for the event in
Figure 13.
In the ports of Livorno and Bari and, more in general, in Italian coastal areas, typical values found by means of a multi-year statistical analysis carried out for Jph are larger (even more than double) compared to the typical 1 cm·hPa−1 of the offshore; this phenomenon, if in phase with astronomical tides, can cause exceptional tide waves.
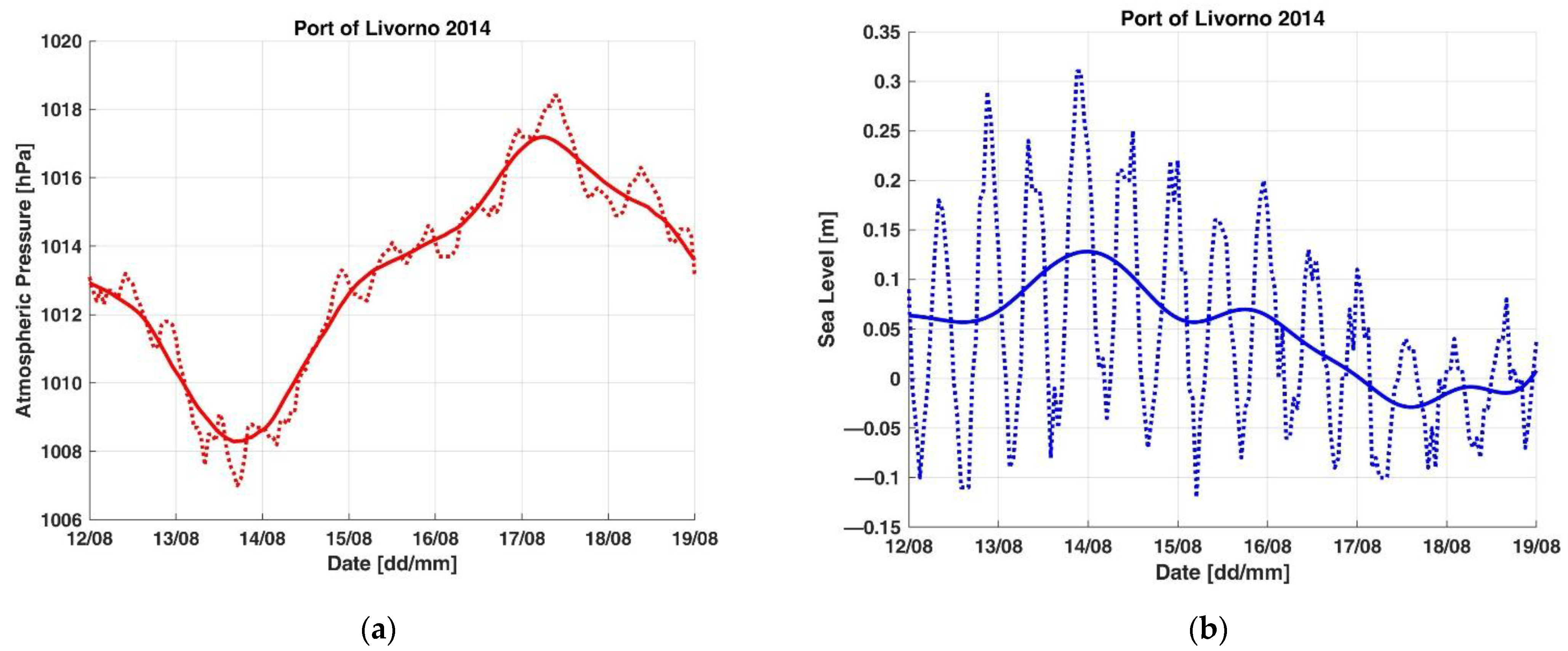
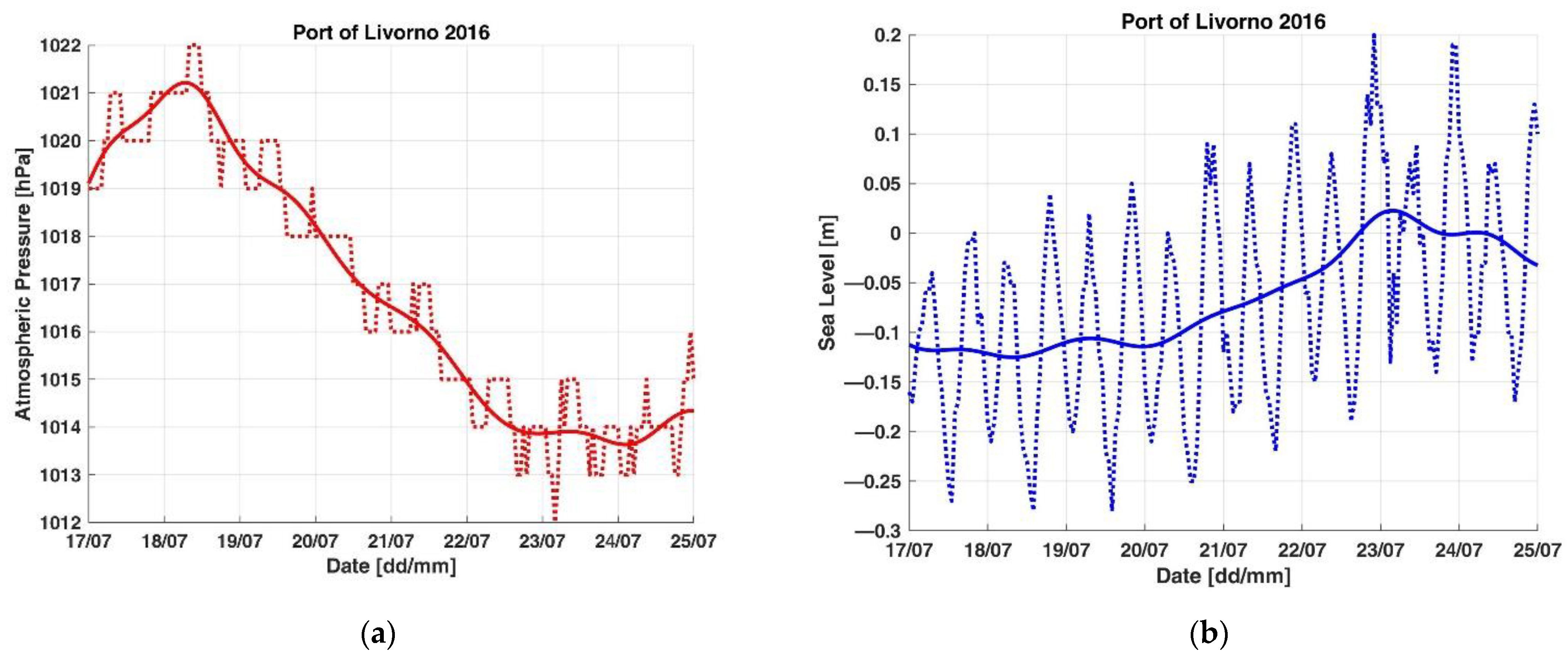
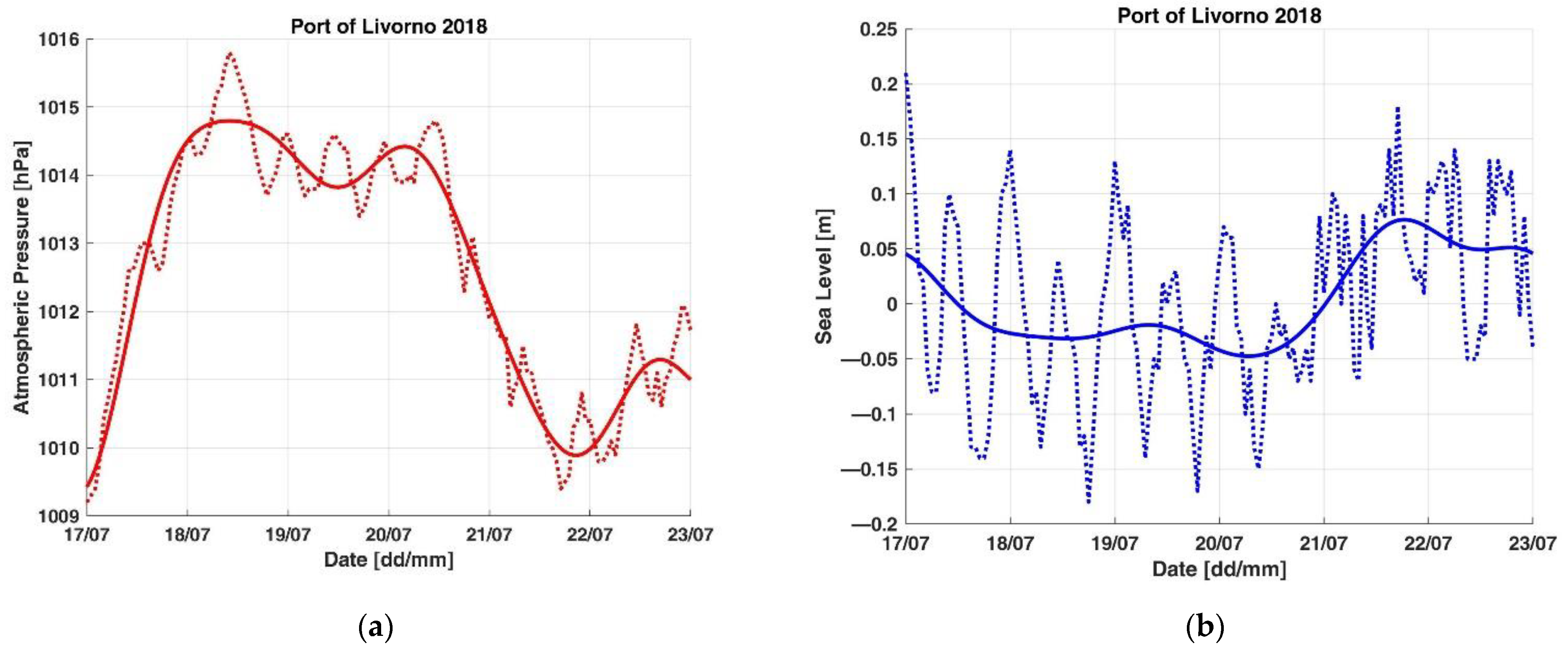
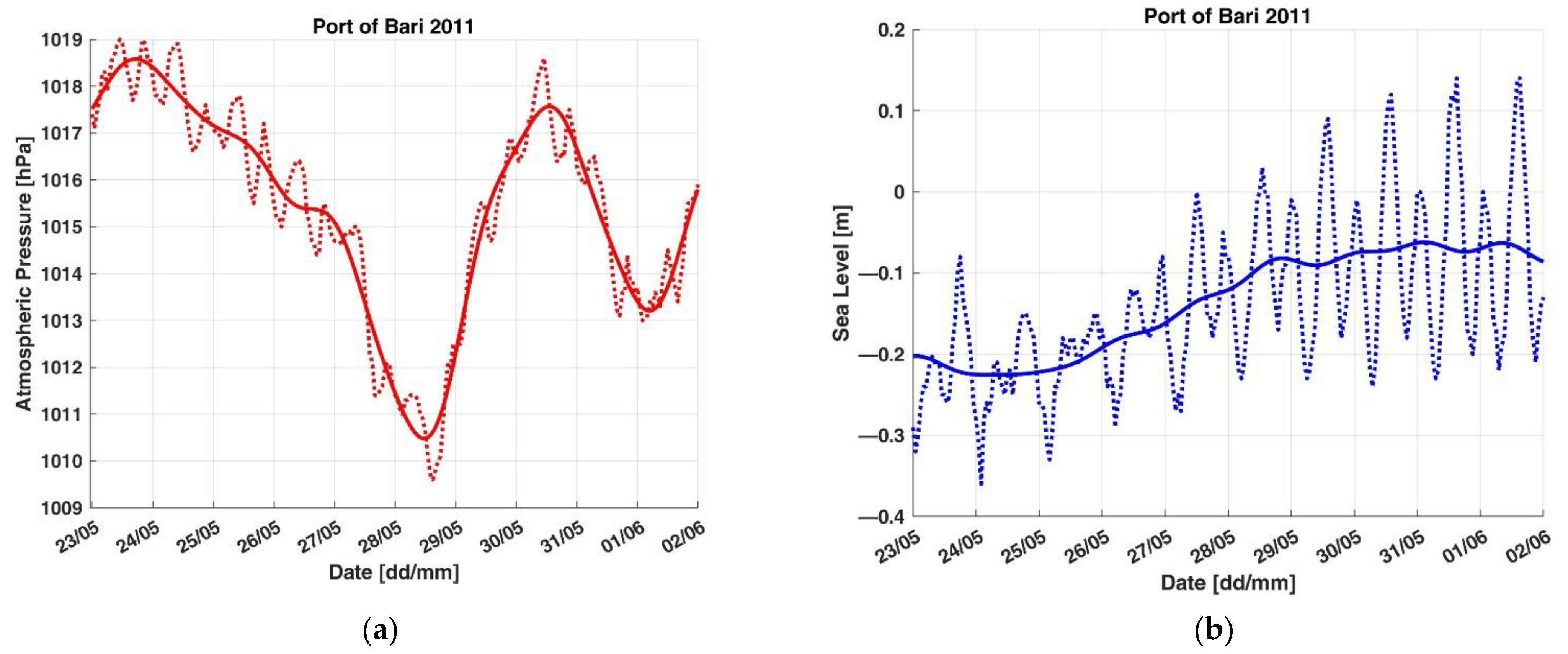
Then, for each event that happened in a given location in the period under consideration, the variation of low frequencies sea level Δh and the gradient of atmospheric pressure Δp are evaluated, and the calculation of Jph is repeated. Many pairs (Δp, Δh) and of corresponding values of Jph are obtained in this way, one for each occurrence of the phenomenon in the time interval examined in a certain basin.
In
Table 1 and
Table 2 representative events that occurred since 2010 in Livorno and Bari harbours are listed, together with the estimates of J
ph (data from 21 September 2015 to 24 March 2019 in Bari are not available). The plots of these events are shown in
Appendix A, in
Figure A1,
Figure A2,
Figure A3,
Figure A4,
Figure A5,
Figure A6,
Figure A7,
Figure A8,
Figure A9,
Figure A10,
Figure A11,
Figure A12,
Figure A13,
Figure A14,
Figure A15,
Figure A16,
Figure A17,
Figure A18,
Figure A19 and
Figure A20 (except the events already shown in
Figure 12 and
Figure 13).
Starting from this statistic, the mean value (2 cm·hPa−1 for Livorno, 2.1 cm·hPa−1 for Bari) can be used as an estimate of Jph (which means to hypothesize a linear dependence of Δh from Δp).
Once known, the hydro-barometric transfer factor allows estimating for each basin a future change in sea level based on the measurement or forecasting of atmospheric pressure (it will be sufficient to multiply the variation of atmospheric pressure by the mean Jph factor and then reverse the sign, taking into account that pressure and level changes have opposite signs: when one increases, the other decreases).
By doing so, the average error on the forecasted meteorological tide (difference between the expected value and the measured one) is about 9.6% for Livorno and 8.2% for Bari, that is satisfactory for our purposes; otherwise, a better estimate could consider a non-linear variation of Δh as a function of Δp, at the cost of increased computational burden.
Once Jph has been evaluated, it is possible to estimate the forecasted sea level by means of a simple processing procedure that calculates the sum of two contributions: the astronomical tide (well-known, available from tide charts) and the meteorological one that, as seen, can be found as the product of the average hydrobarometric factor Jph (with the sign reversed) by the expected (or real-time acquired) atmospheric pressure gradient.
Therefore, the knowledge of Jph is very helpful in harbour waterside management: the effects of pressure variations on seawater depth can be applied to bathymetric maps in coastal areas: a change of atmospheric pressure can be converted, through Jph, into a forecasted meteorological tide and therefore in an expected sea level, and finally in a new bathymetric map.
Finally, it should be noted that it is appropriate to update continuously the estimate of Jph for a certain basin, in particular after events that change the topography (e.g., dredging operations, coastal erosion, sediment deposit, sea bottom subsidence). In any case, multi-decade statistics of Jph is needed if we want to evaluate the possible effect of long-term phenomena such as climate change on the hydrobarometric transfer factor.
3. Results
The system, even if it is still a prototype, was tested on some real events that occurred in Livorno and Bari harbours, achieving satisfactory results in signalling potentially dangerous conditions for a certain ship at a given instant.
In
Figure 14a the center of the map of the port of Livorno is updated by means of data acquired on 24 February 2020 at 02:20; on the contrary,
Figure 14b is referred to 5 December 2020 at 12:10; the user interface reports date, time and sea level of each measurement read from the archive. As we can see, sea level rises from −0.37 to 0.68 m; the consequent increase in sea level equal to 1.05 m causes an enlargement of the allowed area (in particular the green waterway in the middle of the map) and a reduction of the prohibited (red) one (the increase in sea level is partly due to astronomical tide and partly to a decrease in atmospheric pressure which changes approximately from 1023.9 to 994.8 hPa; pressure data at 24 February at 02:20 and on 5 December at 12:10 have been calculated by extrapolating the adjacent hourly measurements).
In
Figure 15 the lower central area of Bari harbour is updated according to the values measured on 24 July 2020: in
Figure 15a the map is at 17:30, while
Figure 15b is referred at 23:30; the sea level is equal to 0.14 m in the first case, and it is to—0.38 m in the second case: then, there is a gradient of—0.52 m between the two different situations illustrated; this induces shrinkage of the allowed (green) area and an expansion of the prohibited (red) zone; atmospheric pressure rises from about 1007.4 to 1011.5 hPa within a few hours and then contributes to drop the sea level; in particular, we can see that the green waterway in the middle of the map becomes narrower, due to the decrease in the sea level.
Furthermore, the user interface shows coordinates and depth of the position pointed by the mouse at each instant; moreover, the traffic light shows by means of the correct colour if that position at the current time belongs to a forbidden, allowed or warning area: by keeping the mouse pointer in a certain position, it is possible to follow the evolution of its state over time.
In
Figure 14, the bottom depth related to coordinates Easting 605,075, Northing 4,824,140 m pointed by the mouse arrow in the middle of the channel varies from 11.49 to 12.54 m, then the corresponding traffic light turns from red (prohibited position) to green (allowed position) colour (thresholds are fixed to 11.5 and 12.5 m). In the example in
Figure 15, on the contrary, the depth of the position Easting 655,971, Northing 4,555,512 m in the middle of the map changes from 10.27 to 9.75 m, so its traffic light changes from green (permitted position) to yellow (warning position) light (higher threshold is equal to 10 m).
Therefore, the user interface implements the so-called virtual traffic lights (partition in red, yellow and green areas) customized for each vessel, depending on its draught: varying sea level, an area that initially was allowed (green), can become a warning (yellow) or forbidden area (red) for that ship, or vice versa; this application has been developed to support port communities (coast guards, port authorities, pilots, terminal operators) to plan and optimize coastal navigation (e.g., deciding when a ship can enter/leave a port or to choose its best route), ship moorings and docking performances (e.g., to which quay a vessel can access), logistics operations and ship loading (e.g., establishing the cargo of a vessel at the starting port according to the expected sea level at the destination), effectiveness in maritime works (e.g., dimensioning of breakwaters), and monitoring of water exchange in harbours; above all, it can be a helpful tool to port operators to increase port navigation safety, to prevent ship accidents, to manage emergencies such as ship stranding, or to reduce the risks of environmental damage (dispersion of pollutant) and economic impacts.
The system has been tried on several real cases by analyzing critical situations, providing satisfactory results in detecting hazardous areas; the examination of two accidents that occurred in the port of Livorno and Bari are described here.
As first, we describe the dynamic analysis of the bathymetry of the port of Livorno on 6 February 2021 (examination of an accident occurred in the past, so the bathymetry is updated by loading sea level values from a data storage): at 08:00 a container ship of 11.5 m draught stranded while was entering the port (the sea level measured by the hydrometer was 0.15 m).
Figure 16a shows virtual traffic lights at the entrance area of the port at that time: threshold levels are selected at 11.5 and 12.5 m; the mouse pointer indicates the approximate location (Easting 604,380, Northing 4,822,105, m) where the vessel grounded; as we can see, the red virtual traffic light indicates that this position was forbidden for that ship at that moment because its updated depth (11.15 m) was smaller than the ship draught.
It is also worth noting that the position considered may not be forbidden for the same ship at another time (corresponding to different sea-level values, for example during a high tide), as well as the same position at the same time could be allowed for another vessel with smaller draught (which would result in different threshold levels).
For example,
Figure 16b shows virtual traffic lights at the same position for the same ship on 10 February 2021 at 07:40: the greater sea-level value (0.55 m) makes the updated depth equal to 11.55 m, then a little greater than the ship draught, so that position belongs to a yellow or warning area. Note that the increase of 0.40 m in sea level between the two situations is partially due to a decrease of 14.6 hPa in atmospheric pressure.
As regards the port of Bari, on 12 July 2011 at about 10:00 a ship of 9 m draught struck the seabed at 8.45 m depth while approaching docks (the monitoring station was measuring: sea level −0.08 m); the dynamic analysis of the bathymetric map for this event had been executed: the updating of the map has been performed by reading from the archive sea level measurements related to that day.
Figure 17a shows virtual traffic lights of a detail of the port at that time: thresholds are chosen equal to 9 and 10 m, respectively. As we can see, particular circumstances occur and a few red pixels (pointed by the mouse arrow) stand out in the middle of the green background (Easting 656,142, Northing 4,555,857 m). This is approximately the position where the ship collided with the anchoring systems of some mooring buoys (structures on the sea floor consisting of metal cages containing concrete inside); the peculiarity of this situation consists in the fact that the danger was concentrated in a very limited area inside a much wider area allowed (for that ship).
As we can see in
Figure 17b at another time, for example, on 21 March 2012 at 08:00, during a low tide (sea level—0.59 m), the same position would be surrounded by a yellow area that that could make the danger better perceptible.
Overall, the usefulness of this application is the capability of detecting potentially dangerous areas in certain locations, at certain times, and, above all, for a given ship. In fact, the current state of virtual traffic lights depends on the position, on the specific moment, and on the threshold levels chosen; the last ones, in turn, depend on the draught of the ship taken into account.
4. Discussion and Conclusions
This article deals with the development of a system aimed at detecting and signaling potentially dangerous situations in coastal areas to decision makers (port authorities, coast guards, pilots), with the purpose of improving maritime safety by mitigating risk due to sea-level variations.
It is underlined the importance of monitoring, processing and forecasting environmental parameters in ports and gulfs. Here is a description of the results of observing and analysing activities in two test sites, Livorno and Bari harbours (Italy).
During tests performed by analyzing some real situations, the application correctly detected hazardous areas for a certain ship at a given instant, properly dividing the test area into allowed, warning and prohibited zones, with a spatial resolution equal to that with which multibeam surveys were performed.
The results achieved so far have been satisfactory to demonstrate the usefulness of the system: its use in the context of harbour waterside management can support port communities (port authorities, pilots) in analysing maritime accidents that occurred in the past as well as in planning and optimizing port activities and logistics operations, in particular:
in increasing effectiveness and safety of coastal maritime transport by choosing, for a given vessel and based on its draught, the best route to follow, or the most suitable pier to moor, or the best time when it can enter or leave a port (to avoid accidents such as stranding);
in optimizing cargo in the departure port (until a ship can be loaded based on the sea level forecasted at the port of arrival);
in planning the refloating of a ship (in case of accidents occurred), in order to mitigate the risk of environmental damages and economic losses for the community.
In particular, by using the forecasted astronomical tide and atmospheric pressure (converted into the expected meteorological tide through the use of the hydrobarometric transfer factor Jph), the dynamic bathymetric map allows improving the performances of port activities by planning them in advance.
In addition, the knowledge in advance of sea level in coastal areas may also be useful for:
optimizing the vessel docking (how to secure moorings to prevent tearing of ropes);
optimizing the effectiveness in maritime works (how to size breakwaters and docks based on the maximum sea level expected);
marine water quality control: assessing the concentration of pollutants (solute) on the basis of knowledge of the amount of seawater (solvent) at a certain moment.
In a hypothetical operational scenario, a local authority could manage a control room hosting a picture showing the dynamic bathymetric map of the harbour (virtual traffic lights), to receive useful support and take the best decisions, in order to ensure safety for people working or living in ports areas or gulfs; the same facility could also work on board ships, e.g., on PC or tablet.
Virtual traffic lights are obviously reliable on the assumption that the inputs of the system are, for instance, that the starting static bathymetric map can still represent the basin topography (otherwise it should be updated by performing new multibeam surveys), that multibeam surveys are performed with an appropriate resolution, that sea-level values acquired by a hydrometer working at a certain position are representative of the whole basin, and that forecasting of atmospheric parameters is accurate and known well in advance; under these conditions, tests performed in Livorno and Bari indicated an average error on the expected meteorological tide less than 10% that very rarely causes confusion about virtual traffic lights; in any case, increasing the number of mareographic stations in a basin, although it would increase installation costs, would allow a better spatial resolution in the dynamic updating of the bathymetric map, by using different sea-level values for each sub-domain into which the basin is divided.
Finally, the system is able to take into account other inputs such as wind effect and storm surges (not relevant and therefore neglected in this study), which are relevant especially in some locations and therefore should be provided as inputs to the sea level forecasting procedure to improve the effectiveness of the tool.











































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}