
Building a Realistic Virtual Simulator for Unmanned Aerial Vehicle Teleoperation

 , ,
, ,  and
and 
Abstract
:1. Introduction
1.1. Simulation of Unmanned Aerial Vehicles
- (1)
- An algorithm preprogrammed in an onboard computer allows it to fly autonomously.
- (2)
- A human pilot operates it remotely from a control station.
- Currently, efficient energy storage and prolonged storage use are open problems [20]. In addition to generating additional costs, the above limits the possibility of continuous training with UAVs since the batteries on board tend to be small and short duration.
1.2. A Survey on Simulators for Unmanned Aerial Vehicles
1.3. About the Proposal
2. Building a Realistic UAV Simulator
2.1. Quadrotor Study Case
2.2. Modeling
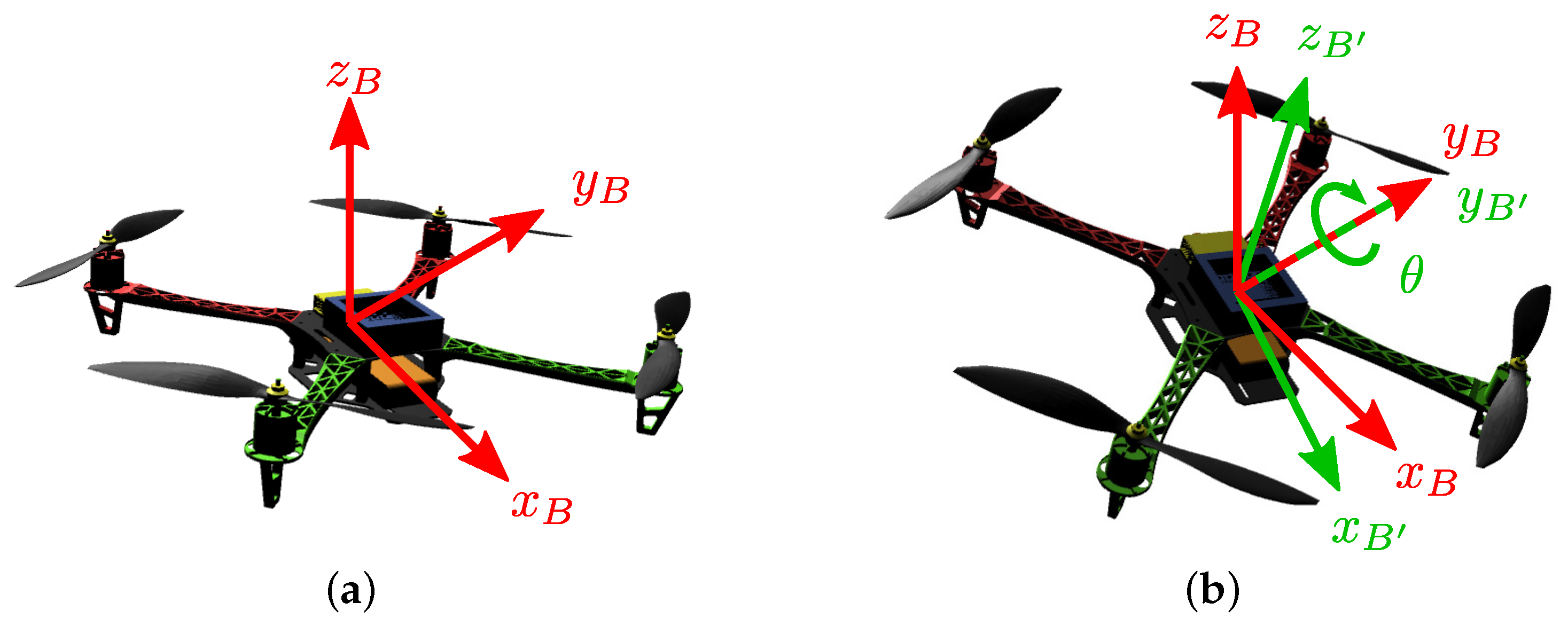
2.2.1. Quadrotor Kinematics
2.2.2. Quadrotor Differential Kinematics
2.2.3. Quadrotor Dynamics
2.2.4. Generalized Forces and Torques in the Quadrotor
2.2.5. Non-Conservative Effects in the Quadrotor
2.3. Dynamic Simulation
2.4. Virtual Environment
2.5. Virtual Dynamic Simulation
2.6. Virtual Teleoperation
- Elevation (lines 1–5 in Algorithm 1): Allows takeoff, landing, and keeping the quadrotor in the air. For this, the reference height varies proportionally to the positional value of the left stick for the vertical axis using the constant . This reference value is set to when to avoid trespassing the floor. Then, is utilized to calculate the vertical thrust by a Proportional Integral Derivative (PID) controller with the gravity compensation term , where , , and are the proportional, integral, and derivative gains, respectively.
- Yaw (lines 6–8 in Algorithm 1): Changes the direction the front of the quadrotor is pointing, to the left or to the right (it is assumed that the front of the quadrotor coincides with the positive direction of the axis ). In this case, the desired yaw angle takes a value proportional to the positional value of the left stick for the horizontal axis with the constant . A PID controller is also adopted to develop the torque with , , and as the proportional, integral, and derivative gains, respectively.
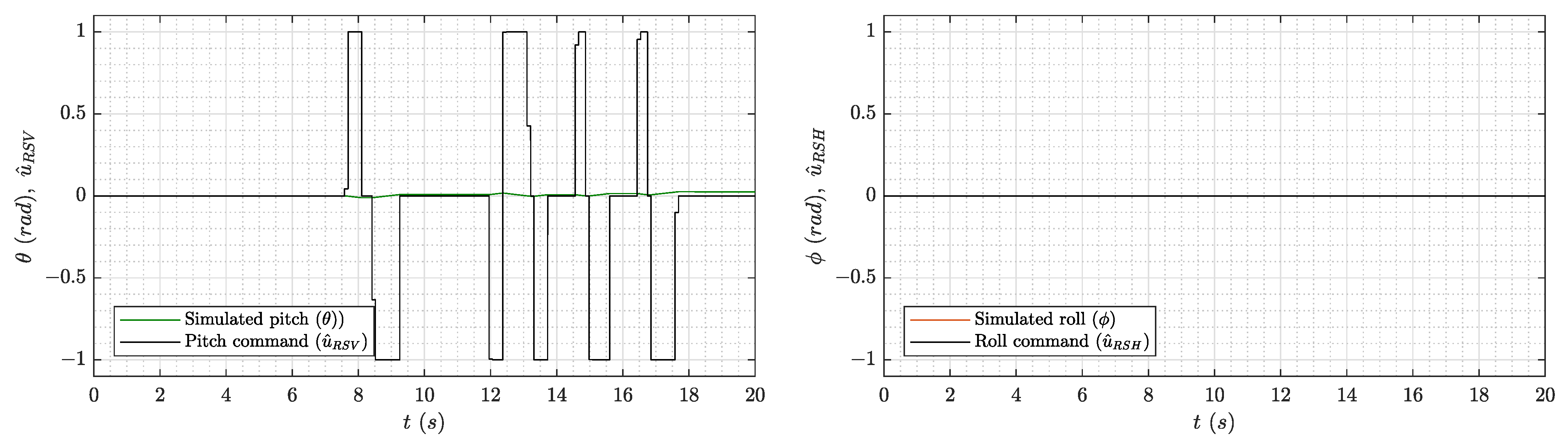
- Pitch (lines 9–16 in Algorithm 1): Produces a forward and backward movement of the quadrotor in the direction the front of the quadrotor is pointing. Here, the desired pitch angle is proportionally modified by the positional value of the right stick for the vertical axis based on the constant . Additionally, the reference is set as to stop the vehicle when . Moreover, the value of is bounded in the interval to avoid singularities. As in the above case, a PID controller is included to develop the torque , where , , and are the proportional, integral, and derivative parameters, respectively.
- Roll (lines 17–24 in Algorithm 1): Generates movement towards the sides of the quadrotor, i.e., in the direction of the axis . In this case, the desired roll angle is proportionally modified by the positional value of the right stick for the horizontal axis using the constant . This reference is set as to stop the vehicle when . As in the pitch movement, the value of is bounded in the interval to avoid singularities. Analogously, a PID controller is included to develop the torque , where , , and are the proportional, integral, and derivative parameters, respectively.
| Algorithm 1: Teleoperation algorithm |
 |
2.7. Simulator Optimization
3. Results and Discussion
4. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Appendix A. Complete Dynamic Model of the Quadrotor
Appendix A.1. Conservative Model
Appendix A.2. Conservative Model with Generalized Forces and Torques
Appendix A.3. Non-Conservative Model with Generalized Forces and Torques
References
- Abushahma, R.I.H.; Ali, M.A.M.; Rahman, N.A.A.; Al-Sanjary, O.I. Comparative Features of Unmanned Aerial Vehicle (UAV) for Border Protection of Libya: A Review. In Proceedings of the 2019 IEEE 15th International Colloquium on Signal Processing Its Applications (CSPA), Penang, Malaysia, 8–9 March 2019; pp. 114–119. [Google Scholar] [CrossRef]
- Maimaitijiang, M.; Sagan, V.; Sidike, P.; Daloye, A.M.; Erkbol, H.; Fritschi, F.B. Crop Monitoring Using Satellite/UAV Data Fusion and Machine Learning. Remote Sens. 2020, 12, 1357. [Google Scholar] [CrossRef]
- Huang, J.; Tian, G.; Zhang, J.; Chen, Y. On Unmanned Aerial Vehicles Light Show Systems: Algorithms, Software and Hardware. Appl. Sci. 2021, 11, 7687. [Google Scholar] [CrossRef]
- Subchan, S.; White, B.; Tsourdos, A.; Shanmugavel, M.; Żbikowski, R. Dubins Path Planning of Multiple UAVs for Tracking Contaminant Cloud. 17th IFAC World Congress. IFAC Proc. Vol. 2008, 41, 5718–5723. [Google Scholar] [CrossRef] [Green Version]
- Fong, T.; Thorpe, C. Vehicle Teleoperation Interfaces. Auton. Robot. 2001, 11, 9–18. [Google Scholar] [CrossRef]
- Mansfield, K.; Eveleigh, T.; Holzer, T.H.; Sarkani, S. Unmanned aerial vehicle smart device ground control station cyber security threat model. In Proceedings of the 2013 IEEE International Conference on Technologies for Homeland Security (HST), Waltham, MA, USA, 12–14 November 2013; pp. 722–728. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, H. Unmanned Water-Powered Aerial Vehicles: Theory and Experiments. IEEE Access 2019, 7, 15349–15356. [Google Scholar] [CrossRef]
- Liaw, J.F.; Tsai, P.H. Target prediction to improve human errors in robot teleoperation system. In Proceedings of the 2017 International Conference on Applied System Innovation (ICASI), Sapporo, Japan, 13–17 May 2017; pp. 1094–1097. [Google Scholar] [CrossRef]
- Isop, W.A.; Gebhardt, C.; Nägeli, T.; Fraundorfer, F.; Hilliges, O.; Schmalstieg, D. High-Level Teleoperation System for Aerial Exploration of Indoor Environments. Front. Robot. AI 2019, 6, 95. [Google Scholar] [CrossRef] [Green Version]
- Besada, J.A.; Campaña, I.; Bergesio, L.; Bernardos, A.M.; de Miguel, G. Drone Flight Planning for Safe Urban Operations: UTM Requirements and Tools. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; pp. 924–930. [Google Scholar] [CrossRef]
- Mademlis, I.; Mygdalis, V.; Nikolaidis, N.; Montagnuolo, M.; Negro, F.; Messina, A.; Pitas, I. High-Level Multiple-UAV Cinematography Tools for Covering Outdoor Events. IEEE Trans. Broadcast. 2019, 65, 627–635. [Google Scholar] [CrossRef]
- Millet, P.; Grinberg, M.; Jahre, M. Challenges in the Realm of Embedded Real-Time Image Processing. In Towards Ubiquitous Low-Power Image Processing Platforms; Jahre, M., Göhringer, D., Millet, P., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 3–13. [Google Scholar] [CrossRef]
- Ashokkumar, C.R.; York, G.W.P. Data science for decision aiding UAV control. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 11–15. [Google Scholar] [CrossRef]
- Zhang, R.; Cao, S.; Zhao, K.; Yu, H.; Hu, Y. A Hybrid-Driven Optimization Framework for Fixed-Wing UAV Maneuvering Flight Planning. Electronics 2021, 10, 2330. [Google Scholar] [CrossRef]
- Ribeiro, R.; Ramos, J.; Safadinho, D.; Reis, A.; Rabadão, C.; Barroso, J.; Pereira, A. Web AR Solution for UAV Pilot Training and Usability Testing. Sensors 2021, 21, 1456. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef] [Green Version]
- Fuller, E. The Educational Road is Open. Bull. Natl. Assoc. Second. Sch. Princ. 1944, 28, 7–11. [Google Scholar] [CrossRef]
- Ballesteros, R.; Ortega, J.F.; Hernández, D.; Moreno, M.A. Applications of georeferenced high-resolution images obtained with unmanned aerial vehicles. Part I: Description of image acquisition and processing. Precis. Agric. 2014, 15, 579–592. [Google Scholar] [CrossRef]
- Hing, J.T.; Sevcik, K.W.; Oh, P.Y. Improving unmanned aerial vehicle pilot training and operation for flying in cluttered environments. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 5641–5646. [Google Scholar] [CrossRef]
- Turk, I.; Ozbek, E.; Ekici, S.; Karakoc, T.H. A conceptual design of a solar powered UAV and assessment for continental climate flight conditions. Int. J. Green Energy 2021, 1–11. [Google Scholar] [CrossRef]
- Kinoshita, T.; Imado, F. The Application of an UAV Flight Simulator - The Development of a New Point Mass Model for an Aircraft. In Proceedings of the 2006 SICE-ICASE International Joint Conference, Busan, Korea, 18–21 October 2006; pp. 4378–4383. [Google Scholar] [CrossRef]
- Orbea, D.; Moposita, J.; Aguilar, W.G.; Paredes, M.; León, G.; Jara-Olmedo, A. Math Model of UAV Multi Rotor Prototype with Fixed Wing Aerodynamic Structure for a Flight Simulator. In Augmented Reality, Virtual Reality, and Computer Graphics; De Paolis, L.T., Bourdot, P., Mongelli, A., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 199–211. [Google Scholar]
- Fernando, H.C.T.E.; De Silva, A.T.A.; De Zoysa, M.D.C.; Dilshan, K.A.D.C.; Munasinghe, S.R. Modelling, simulation and implementation of a quadrotor UAV. In Proceedings of the 2013 IEEE 8th International Conference on Industrial and Information Systems, Peradeniya, Sri Lanka, 17–20 December 2013; pp. 207–212. [Google Scholar] [CrossRef]
- Jin, G.D.; Gu, L.X.; Lu, L.B. UAV Simulator-Based Simulation of Flight Control System. In Proceedings of the 2009 International Workshop on Intelligent Systems and Applications, Hangzhou, China, 26–27 August 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Siddiqui, K.T.A.; Feil-Seifer, D.; Jiang, T.; Jose, S.; Liu, S.; Louis, S. Development of a Swarm UAV Simulator Integrating Realistic Motion Control Models For Disaster Operations. In Proceedings of the ASME 2017 Dynamic Systems and Control Conference, Tysons, VA, USA, 11–13 October 2017; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Rzucidło, P. Unmanned air vehicle research simulator-prototyping and testing of control and navigation systems. Solid State Phenom. 2013, 198, 266–271. [Google Scholar] [CrossRef]
- Manaï, M.; Desbiens, A.; Gagnon, E. Identification of a UAV and Design of a Hardware-in-the-Loop System for Nonlinear Control Purposes. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar] [CrossRef]
- Lizarraga, M.; Dobrokhodov, V.; Elkaim, G.; Curry, R.; Kaminer, I. Simulink Based Hardware-in-the-Loop Simulator for Rapid Prototyping of UAV Control Algorithms. In Proceedings of the AIAA Infotech@Aerospace Conference, Seattle, WA, USA, 6–9 April 2009. [Google Scholar] [CrossRef] [Green Version]
- Ates, S.; Bayezit, I.; Inalhan, G. Design and Hardware-in-the-Loop Integration of a UAV Microavionics System in a Manned–Unmanned Joint Airspace Flight Network Simulator. J. Intell. Robot. Syst. 2009, 54, 359–386. [Google Scholar] [CrossRef]
- Lugo-Cárdenas, I.; Salazar, S.; Lozano, R. The MAV3DSim hardware in the loop simulation platform for research and validation of UAV controllers. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1335–1341. [Google Scholar] [CrossRef]
- Meng, W.; Hu, Y.; Lin, J.; Lin, F.; Teo, R. ROS+unity: An efficient high-fidelity 3D multi-UAV navigation and control simulator in GPS-denied environments. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 2562–2567. [Google Scholar] [CrossRef]
- Zhang, M.; Qin, H.; Lan, M.; Lin, J.; Wang, S.; Liu, K.; Lin, F.; Chen, B.M. A high fidelity simulator for a quadrotor UAV using ROS and Gazebo. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015; pp. 2846–2851. [Google Scholar] [CrossRef]
- Baidya, S.; Shaikh, Z.; Levorato, M. FlyNetSim: An Open Source Synchronized UAV Network Simulator Based on Ns-3 and Ardupilot. In Proceedings of the 21st ACM International Conference on Modeling, Analysis and Simulation of Wireless and Mobile Systems, MSWIM ’18, Montreal, QC, Canada, 28 October–2 November 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 37–45. [Google Scholar] [CrossRef]
- Ferlini, A.; Wang, W.; Pau, G. Corner-3D: A RF Simulator for UAV Mobility in Smart Cities. In Proceedings of the ACM SIGCOMM 2019 Workshop on Mobile AirGround Edge Computing, Systems, Networks, and Applications, MAGESys’19, Beijing, China, 19 August 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 22–28. [Google Scholar] [CrossRef]
- Mcmanus, I.; Greer, D.; Walker, R. Uav avionics’ hardware in the loop’simulator. In Proceedings of the 10th Australian International Aerospace Congress, Barton, Australia, 29 July–1 August 2003; pp. 1–7. [Google Scholar]
- Garcia, R.; Barnes, L. Multi-UAV Simulator Utilizing X-Plane. In Proceedings of the 2nd International Symposium on UAVs, Reno, NV, USA, 8–10 June 2009; Valavanis, K.P., Beard, R., Oh, P., Ollero, A., Piegl, L.A., Shim, H., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 393–406. [Google Scholar] [CrossRef]
- De Rango, F.; Palmieri, N.; Santamaria, A.F.; Potrino, G. A simulator for UAVs management in agriculture domain. In Proceedings of the 2017 International Symposium on Performance Evaluation of Computer and Telecommunication Systems (SPECTS), Seattle, WA, USA, 9–12 July 2017; pp. 1–8. [Google Scholar] [CrossRef]
- Mueller, M.; Smith, N.; Ghanem, B. A Benchmark and Simulator for UAV Tracking. In Proceedings of the Computer Vision—ECCV 2016, Amsterdam, The Netherlands, 11–14 October 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 445–461. [Google Scholar]
- Imado, F.; Abe, S.; Kinoshita, T. The Development of Three-Dimensional Scale Model UAV Simulator. In Proceedings of the 2006 SICE-ICASE International Joint Conference, Busan, Korea, 18–21 October 2006; pp. 4921–4925. [Google Scholar] [CrossRef]
- Al-Mousa, A.; Sababha, B.H.; Al-Madi, N.; Barghouthi, A.; Younisse, R. UTSim: A framework and simulator for UAV air traffic integration, control, and communication. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419870937. [Google Scholar] [CrossRef] [Green Version]
- Shah, S.; Dey, D.; Lovett, C.; Kapoor, A. AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles. In Proceedings of the Field and Service Robotics, Zurich, Switzerland, 12–15 September 2017. [Google Scholar]
- Zhang, F.; Lyu, X.; Wang, Y.; Gu, H.; Li, Z. Modeling and Flight Control Simulation of a Quadrotor Tailsitter VTOL UAV. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar] [CrossRef]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control; John Wiley & Sons: Hoboken, NJ, USA, 2020. [Google Scholar]
- Wells, D.A. Schaum’s Outline of Lagrangian Dynamics; Schaum’s Outlines; McGraw-Hill: New York, NY, USA, 1967. [Google Scholar]
- Wit, C.D.; Rabbinge, R. Systems Analysis and Dynamic Simulation 1. EPPO Bull. 1979, 9, 149–153. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Wang, L.; Qin, W.; Shen, Q. A local observability analysis method for a time-varying nonlinear system and its application in the continuous self-calibration system. Sci. China Inf. Sci. 2020, 64, 11920. [Google Scholar] [CrossRef]
- Lafortune, S.; Sengupta, R.; Kaufman, D.E.; Smith, R.L. Dynamic system-optimal traffic assignment using a state space model. Transp. Res. Part B Methodol. 1993, 27, 451–472. [Google Scholar] [CrossRef] [Green Version]
- Fathoni, M.F.; Wuryandari, A.I. Comparison between Euler, Heun, Runge-Kutta and Adams-Bashforth-Moulton integration methods in the particle dynamic simulation. In Proceedings of the 2015 4th International Conference on Interactive Digital Media (ICIDM), Bandung, Indonesia, 1–5 December 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Zheng, J.; Chan, K.; Gibson, I. Virtual reality. IEEE Potentials 1998, 17, 20–23. [Google Scholar] [CrossRef]
- Okita, A. Learning C# Programming with Unity 3D; AK Peters/CRC Press: Natick, MA, USA, 2019. [Google Scholar]
- Su, H.; Qi, W.; Yang, C.; Sandoval, J.; Ferrigno, G.; De Momi, E. Deep neural network approach in robot tool dynamics identification for bilateral teleoperation. IEEE Robot. Autom. Lett. 2020, 5, 2943–2949. [Google Scholar] [CrossRef]
- Bolopion, A.; Régnier, S. A review of haptic feedback teleoperation systems for micromanipulation and microassembly. IEEE Trans. Autom. Sci. Eng. 2013, 10, 496–502. [Google Scholar] [CrossRef] [Green Version]
- Rupp, M.A.; Oppold, P.; McConnell, D.S. Evaluating input device usability as a function of task difficulty in a tracking task. Ergonomics 2015, 58, 722–735. [Google Scholar] [CrossRef]
- Rodríguez-Molina, A.; Mezura-Montes, E.; Villarreal-Cervantes, M.G.; Aldape-Pérez, M. Multi-objective meta-heuristic optimization in intelligent control: A survey on the controller tuning problem. Appl. Soft Comput. 2020, 93, 106342. [Google Scholar] [CrossRef]
- Yeşil, E.; Güzelkaya, M.; Eksin, İ. Self tuning fuzzy PID type load and frequency controller. Energy Convers. Manag. 2004, 45, 377–390. [Google Scholar] [CrossRef]
- Caraffini, F.; Santucci, V.; Milani, A. Evolutionary Computation & Swarm Intelligence; MDPI: Basel, Switzerland, 2020. [Google Scholar]
- Kenneth, V. Price. An introduction to differential evolution. In New Ideas in Optimization; McGraw-Hill: London, UK, 1999; pp. 79–108. [Google Scholar]
- Pant, M.; Zaheer, H.; Garcia-Hernandez, L.; Abraham, A. Differential Evolution: A review of more than two decades of research. Eng. Appl. Artif. Intell. 2020, 90, 103479. [Google Scholar] [CrossRef]
- Mezura-Montes, E.; Velázquez-Reyes, J.; Coello Coello, C.A. A Comparative Study of Differential Evolution Variants for Global Optimization. In Proceedings of the 8th Annual Conference on Genetic and Evolutionary Computation, GECCO ’06, Seattle, WA, USA, 8–12 July 2006; Association for Computing Machinery: New York, NY, USA, 2006; pp. 485–492. [Google Scholar] [CrossRef] [Green Version]
- Ljung, L.; Glad, T. Modeling of Dynamic Systems; Prentice-Hall, Inc.: Englewood Cliffs, NJ, USA, 1994. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Nominal Value |
|---|---|
| m | 0.225 (kg) |
| g | 9.81 (m/s2) |
| 5.0 × 10−3 (kg m2) | |
| 5.0 × 10−3 (kg m2) | |
| 5.0 × 10−3 (kg m2) | |
| 0.042 (m) | |
| 1.0 (N s/m) | |
| 1.0 (N s/m) | |
| 1.0 (N s/m) | |
| 0.5 (N m s/rad) | |
| 0.5 (N m s/rad) | |
| 0.5 (N m s/rad) |
| Type | Parameter | Value |
|---|---|---|
| Input | 0.0028 | |
| scaling | 0.0027 | |
| constants | 0.9879 | |
| 0.3030 | ||
| Proportional | 12.3973 | |
| gains | 26.9075 | |
| 0.3159 | ||
| 0.1176 | ||
| Integral | 0.0146 | |
| gains | 0.0001 | |
| 0.0363 | ||
| 0.0116 | ||
| Derivative | 16.4687 | |
| gains | 0.0022 | |
| 0.0029 | ||
| 0.0781 |
| Objective Function | Value |
|---|---|
| 0.8204 | |
| 0.2148 | |
| 0.0537 | |
| 0.0013 | |
| 1.0903 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mora-Soto, M.E.; Maldonado-Romo, J.; Rodríguez-Molina, A.; Aldape-Pérez, M. Building a Realistic Virtual Simulator for Unmanned Aerial Vehicle Teleoperation. Appl. Sci. 2021, 11, 12018. https://doi.org/10.3390/app112412018
Mora-Soto ME, Maldonado-Romo J, Rodríguez-Molina A, Aldape-Pérez M. Building a Realistic Virtual Simulator for Unmanned Aerial Vehicle Teleoperation. Applied Sciences. 2021; 11(24):12018. https://doi.org/10.3390/app112412018
Chicago/Turabian StyleMora-Soto, Manuel Eduardo, Javier Maldonado-Romo, Alejandro Rodríguez-Molina, and Mario Aldape-Pérez. 2021. "Building a Realistic Virtual Simulator for Unmanned Aerial Vehicle Teleoperation" Applied Sciences 11, no. 24: 12018. https://doi.org/10.3390/app112412018
APA StyleMora-Soto, M. E., Maldonado-Romo, J., Rodríguez-Molina, A., & Aldape-Pérez, M. (2021). Building a Realistic Virtual Simulator for Unmanned Aerial Vehicle Teleoperation. Applied Sciences, 11(24), 12018. https://doi.org/10.3390/app112412018