
An Experimental Ultrasound Database for Tomographic Imaging



Abstract
:1. Introduction
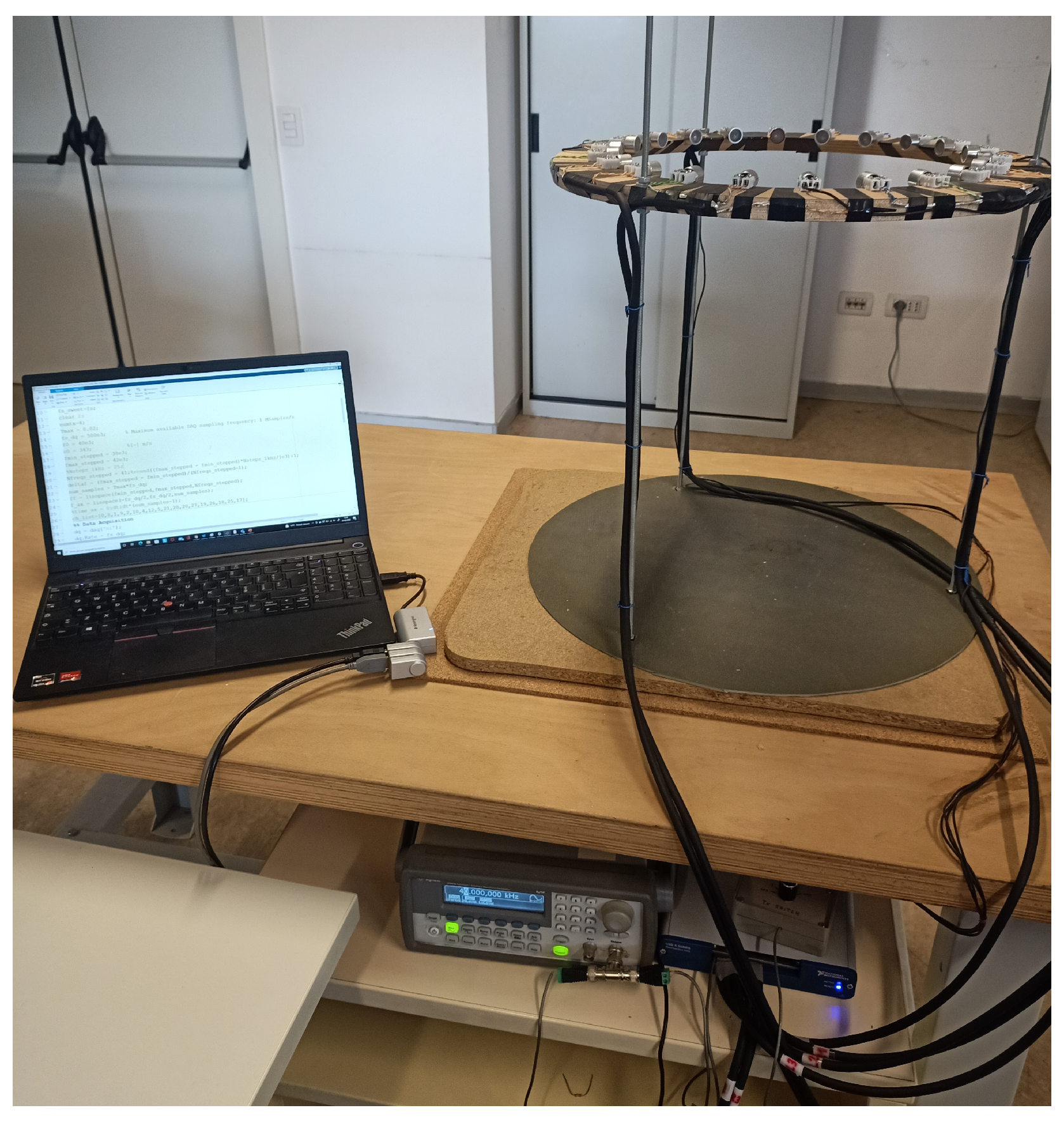
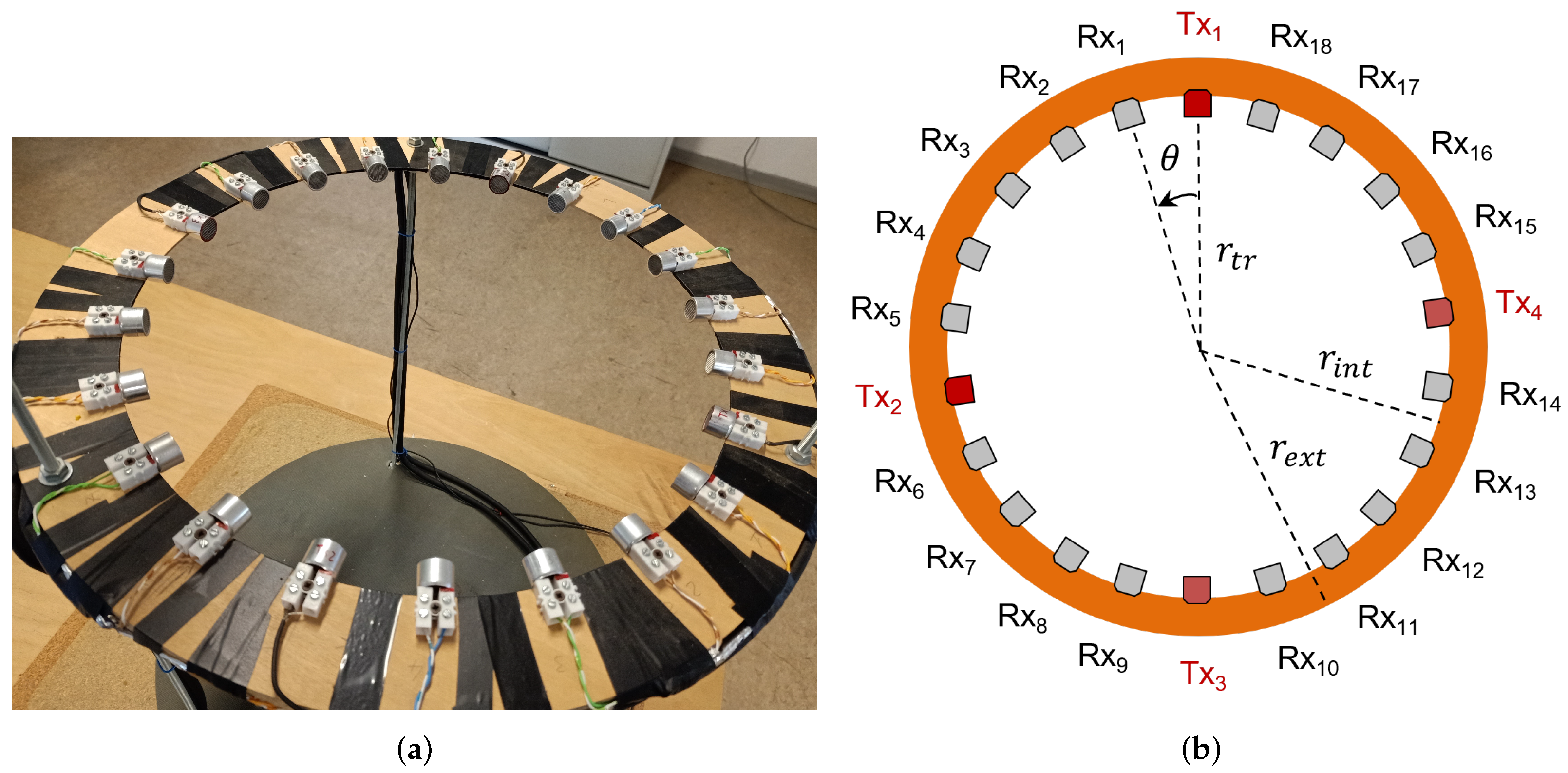
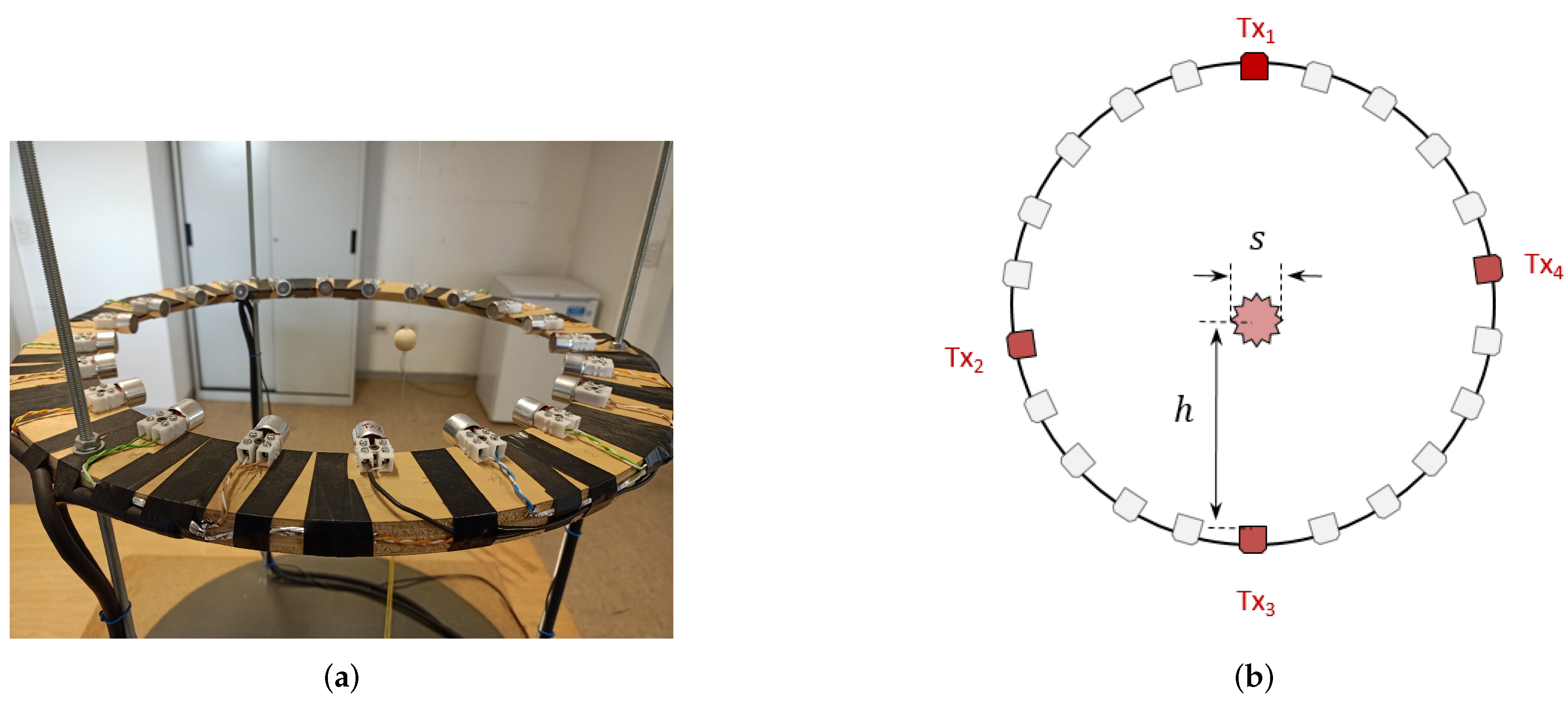
2. Experimental Ultrasound System
- a circular wooden ring hosting twenty-two US transducers (both transmitters and receivers);
- a signal generator (Agilent Technologies, model 33220A) for the transmitters excitation;
- an analog-to-digital converter (National Instrument, 6363 DAQ USB X Series);
- a standard laptop to control the acquisitions and to perform the processing.
3. Data Acquisition Protocol
4. Data Set Description
- Scenario 1: A single object of different shape, size, and materialIn this set of measurements, the acquisition of a single object of various shapes, sizes, and materials is considered, as illustrated in Figure 5. The types of objects are briefly summarised in Table 1, which provides the main details. In all these measurements, for a total of 13 acquisitions, the position of the object remains fixed and only its size and material change, as detailed in Table 2.
- Scenario 2: two wooden spheres of equal size
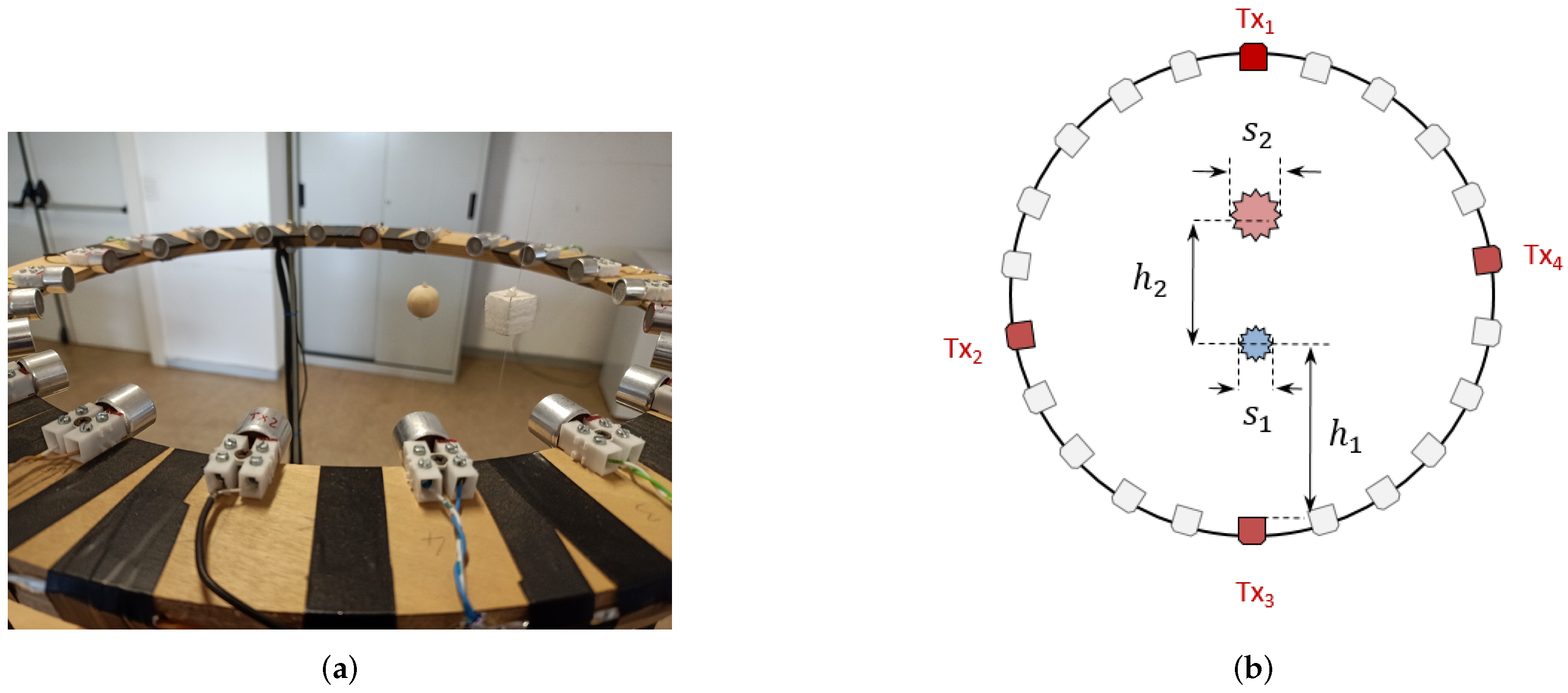
- Scenario 3: Two objects of different size, shape, and material
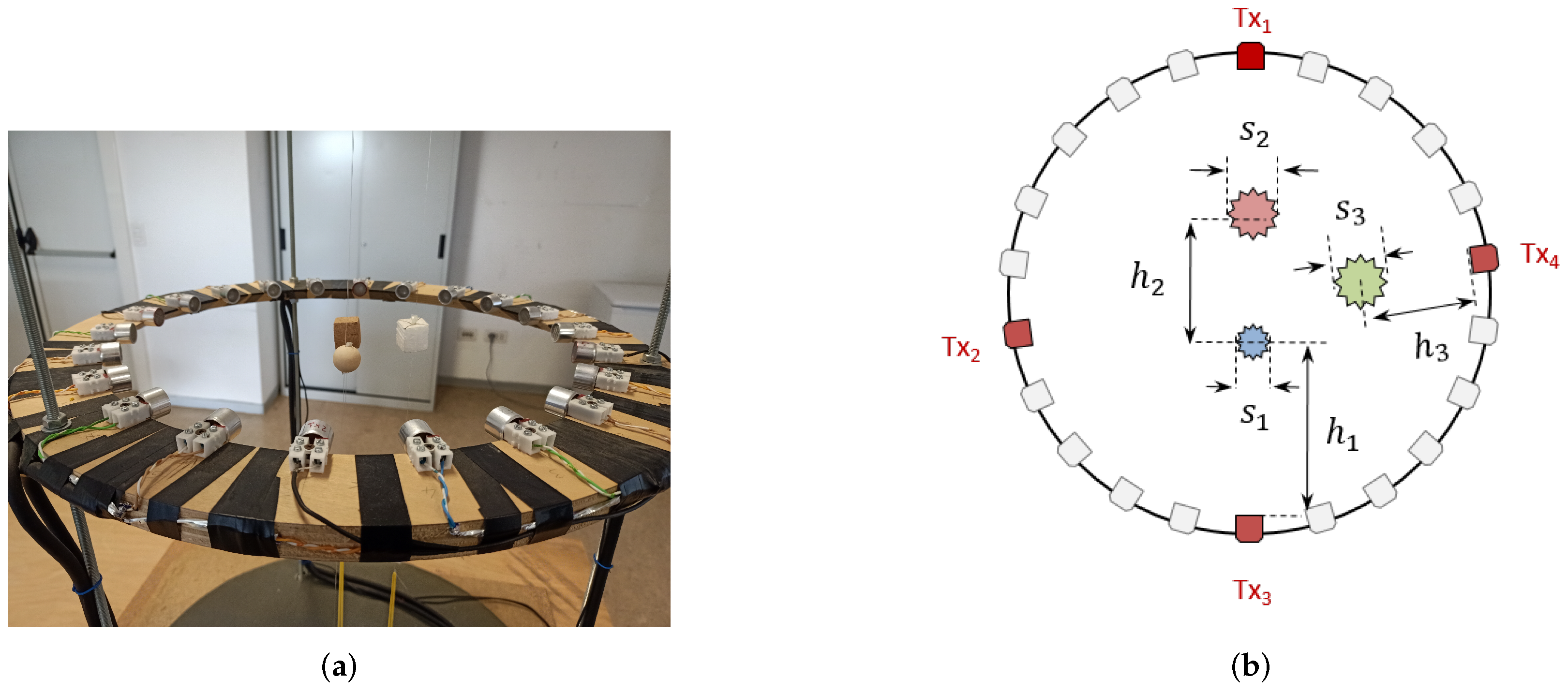
- Scenario 4: three objects
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MIMO | multiple-input-multiple-output |
| OIs | objects of interest |
| US | ultrasound |
| UST | ultrasound tomography |
References
- Sanches, J.M.; Laine, A.F.; Suri, J.S. Ultrasound Imaging; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Joel, T.; Sivakumar, R. Despeckling of ultrasound medical images: A survey. J. Image Graph. 2013, 1, 161–165. [Google Scholar] [CrossRef]
- Yahya, N.; Kamel, N.S.; Malik, A.S. Subspace-based technique for speckle noise reduction in SAR images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6257–6271. [Google Scholar] [CrossRef]
- Ambrosanio, M.; Baselice, F.; Ferraioli, G.; Pascazio, V. Ultrasound despeckling based on non local means. In EMBEC & NBC 2017; Springer: Berlin/Heidelberg, Germany, 2017; pp. 109–112. [Google Scholar]
- Gemmeke, H.; Ruiter, N.V. 3D ultrasound computer tomography for medical imaging. Nucl. Instrum. Methods Phys. Res. Sect. Accel. Spectrom. Detect. Assoc. Equip. 2007, 580, 1057–1065. [Google Scholar] [CrossRef]
- Korta Martiartu, N.; Boehm, C.; Hapla, V.; Maurer, H.; Balic, I.J.; Fichtner, A. Optimal experimental design for joint reflection-transmission ultrasound breast imaging: From ray-to wave-based methods. J. Acoust. Soc. Am. 2019, 146, 1252–1264. [Google Scholar] [CrossRef]
- Goncharsky, A.V.; Romanov, S.Y.; Seryozhnikov, S.Y. Low-frequency ultrasonic tomography: Mathematical methods and experimental results. Mosc. Univ. Phys. Bull. 2019, 74, 43–51. [Google Scholar] [CrossRef]
- Greenleaf, J.F.; Bahn, R.C. Clinical imaging with transmissive ultrasonic computerized tomography. IEEE Trans. Biomed. Eng. 1981, 2, 177–185. [Google Scholar] [CrossRef]
- Fink, M. Time reversal of ultrasonic fields. i. basic principles. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 1992, 39, 555–566. [Google Scholar] [CrossRef]
- Dong, C.; Jin, Y.; Lu, E. Accelerated nonlinear multichannel ultrasonic tomographic imaging using target sparseness. IEEE Trans. Image Process. 2014, 23, 1379–1393. [Google Scholar] [CrossRef]
- Moallemi, N.; Shahbazpanahi, S. A new model for array spatial signature for two-layer imaging with applications to nondestructive testing using ultrasonic arrays. IEEE Trans. Signal Process. 2015, 63, 2464–2475. [Google Scholar] [CrossRef]
- Wiskin, J.; Malik, B.; Borup, D.; Pirshafiey, N.; Klock, J. Full wave 3d inverse scattering transmission ultrasound tomography in the presence of high contrast. Sci. Rep. 2020, 10, 1–14. [Google Scholar] [CrossRef]
- Franceschini, S.; Ambrosanio, M.; Baselice, F.; Pascazio, V. A tomographic multiview-multistatic ultrasound system for biomedical imaging applications. In Proceedings of the 13th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2020)—Volume 1: BIODEVICES, Valletta, Malta, 24–26 February 2020; pp. 274–279. [Google Scholar]
- Yang, M.; Sampson, R.; Wei, S.; Wenisch, T.F.; Chakrabarti, C. Separable beamforming for 3-d medical ultrasound imaging. IEEE Trans. Signal Process. 2014, 63, 279–290. [Google Scholar] [CrossRef]
- Huthwaite, P.; Simonetti, F. High-resolution imaging without iteration: A fast and robust method for breast ultrasound tomography. J. Acoust. Soc. Am. 2011, 130, 1721–1734. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sandhu, G.Y.; Li, C.; Roy, O.; Schmidt, S.; Duric, N. Frequency domain ultrasound waveform tomography: Breast imaging using a ring transducer. Phys. Med. Biol. 2015, 60, 5381. [Google Scholar] [CrossRef] [PubMed]
- Mojabi, P.; LoVetri, J. Evaluation of balanced ultrasound breast imaging under three density profile assumptions. IEEE Trans. Comput. Imaging 2017, 3, 864–875. [Google Scholar] [CrossRef]
- Qin, Y.; Rodet, T.; Lambert, M.; Lesselier, D. Joint inversion of electromagnetic and acoustic data with edge-preserving regularization for breast imaging. IEEE Trans. Comput. Imaging 2021, 7, 349–360. [Google Scholar] [CrossRef]
- Qin, Y.; Rodet, T.; Lambert, M.; Lesselier, D. Microwave breast imaging with prior ultrasound information. IEEE Open J. Antennas Propag. 2020, 1, 472–482. [Google Scholar] [CrossRef]
- Abdollahi, N.; Kurrant, D.; Mojabi, P.; Omer, M.; Fear, E.; LoVetri, J. Incorporation of ultrasonic prior information for improving quantitative microwave imaging of breast. IEEE J. Multiscale Multiphys. Comput. Tech. 2019, 4, 98–110. [Google Scholar] [CrossRef]
- Mojabi, P.; LoVetri, J. Experimental evaluation of composite tissue-type ultrasound and microwave imaging. IEEE J. Multiscale Multiphys. Comput. Tech. 2019, 4, 119–132. [Google Scholar] [CrossRef]
- Camacho, J.; Medina, L.; Cruza, J.F.; Moreno, J.M.; Fritsch, C. Multimodal ultrasonic imaging for breast cancer detection. Arch. Acoust. 2012, 37, 253–260. [Google Scholar] [CrossRef]
- González-Salido, N.; Medina, L.; Camacho, J. Full angle spatial compound of arfi images for breast cancer detection. Ultrasonics 2016, 71, 161–171. [Google Scholar] [CrossRef]
- Rodriguez-Molares, A.; Rindal, O.M.H.; Bernard, O.; Nair, A.; Bell, M.A.L.; Liebgott, H.; Austeng, A. The ultrasound toolbox. In Proceedings of the 2017 IEEE International Ultrasonics Symposium (IUS), Washington, DC, USA, 6–9 September 2017; pp. 1–4. [Google Scholar]
- Ruiter, N.V.; Zapf, M.; Hopp, T.; Gemmeke, H.; Van Dongen, K.W. Usct data challenge. In Proceedings of the Medical Imaging 2017: Ultrasonic Imaging and Tomography, Orlando, FL, USA, 15–16 February 2017; Volume 10139, p. 101391N. [Google Scholar]
- Gudra, T.; Opielinski, K.J.; Jankowski, J. Estimation of the variation in target strength of objects in the air. Int. Congr. Ultrason. 2010, 3, 209–215. [Google Scholar] [CrossRef] [Green Version]
- Treeby, B.; Cox, B.T. k-wave: Matlab toolbox for the simulation and reconstruction of photoacoustic wave fields. J. Biomed. Opt. 2010, 15, 021314. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object | Size (Diameter/Side) [cm] | Shape | Material |
|---|---|---|---|
 | Sphere | Wood | |
 | Sphere | Styrofoam | |
 | Cube | Styrofoam | |
 | Cube | Cork |
| Set | Object (  ) ) | h [cm] | s [cm] |
|---|---|---|---|
| 1.01 | | 11 | |
| 1.02 | | 11 | |
| 1.03 | | 11 | |
| 1.04 | | 11 | |
| 1.05 | | 11 | |
| 1.06 | | 11 | |
| 1.07 | | ||
| 1.08 | | ||
| 1.09 | | ||
| 1.10 | | ||
| 1.11 | | 11 | |
| 1.12 | | 11 | |
| 1.13 | | 11 |
| Set | Object | s [cm] | [cm] | [cm] |
|---|---|---|---|---|
| 2.01 | | 11 | ||
| 2.02 | | 11 | ||
| 2.03 | | 11 | ||
| 2.04 | | 11 | ||
| 2.05 | | 11 | ||
| 2.06 | | 11 | ||
| 2.07 | | 11 | ||
| 2.08 | | 11 |
| Set | Object 1 ( ) | [cm] | [cm] | Object 2 (  ) ) | [cm] | [cm] |
|---|---|---|---|---|---|---|
| 3.01 | | 11 | | |||
| 3.02 | | 11 | | |||
| 3.03 | | 11 | | |||
| 3.04 | | 11 | | |||
| 3.05 | | 13 | | |||
| 3.06 | | 13 | | |||
| 3.07 | | 13 | | |||
| 3.08 | | 13 | | |||
| 3.09 | | | ||||
| 3.10 | | | ||||
| 3.11 | | | ||||
| 3.12 | | | ||||
| 3.13 | | | ||||
| 3.14 | | | ||||
| 3.15 | | 11 | | |||
| 3.16 | | 11 | | |||
| 3.17 | | 11 | | |||
| 3.18 | | 11 | | |||
| 3.19 | | 11 | | |||
| 3.20 | | 11 | |
| Set | Object 1 ( ) | [cm] | [cm] | Object 2 ( ) | [cm] | [cm] | Object 3 (  ) ) | [cm] | [cm] |
|---|---|---|---|---|---|---|---|---|---|
| 4.01 | | 10 | | | |||||
| 4.02 | | | | ||||||
| 4.03 | | 18 | | | |||||
| 4.04 | | 14 | | | |||||
| 4.05 | | 14 | | | |||||
| 4.06 | | 14 | | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Franceschini, S.; Ambrosanio, M.; Gifuni, A.; Grassini, G.; Baselice, F. An Experimental Ultrasound Database for Tomographic Imaging. Appl. Sci. 2022, 12, 5192. https://doi.org/10.3390/app12105192
Franceschini S, Ambrosanio M, Gifuni A, Grassini G, Baselice F. An Experimental Ultrasound Database for Tomographic Imaging. Applied Sciences. 2022; 12(10):5192. https://doi.org/10.3390/app12105192
Chicago/Turabian StyleFranceschini, Stefano, Michele Ambrosanio, Angelo Gifuni, Giuseppe Grassini, and Fabio Baselice. 2022. "An Experimental Ultrasound Database for Tomographic Imaging" Applied Sciences 12, no. 10: 5192. https://doi.org/10.3390/app12105192
APA StyleFranceschini, S., Ambrosanio, M., Gifuni, A., Grassini, G., & Baselice, F. (2022). An Experimental Ultrasound Database for Tomographic Imaging. Applied Sciences, 12(10), 5192. https://doi.org/10.3390/app12105192