
GNSS-RTK Adaptively Integrated with LiDAR/IMU Odometry for Continuously Global Positioning in Urban Canyons


 ,
, 
Abstract
:1. Introduction
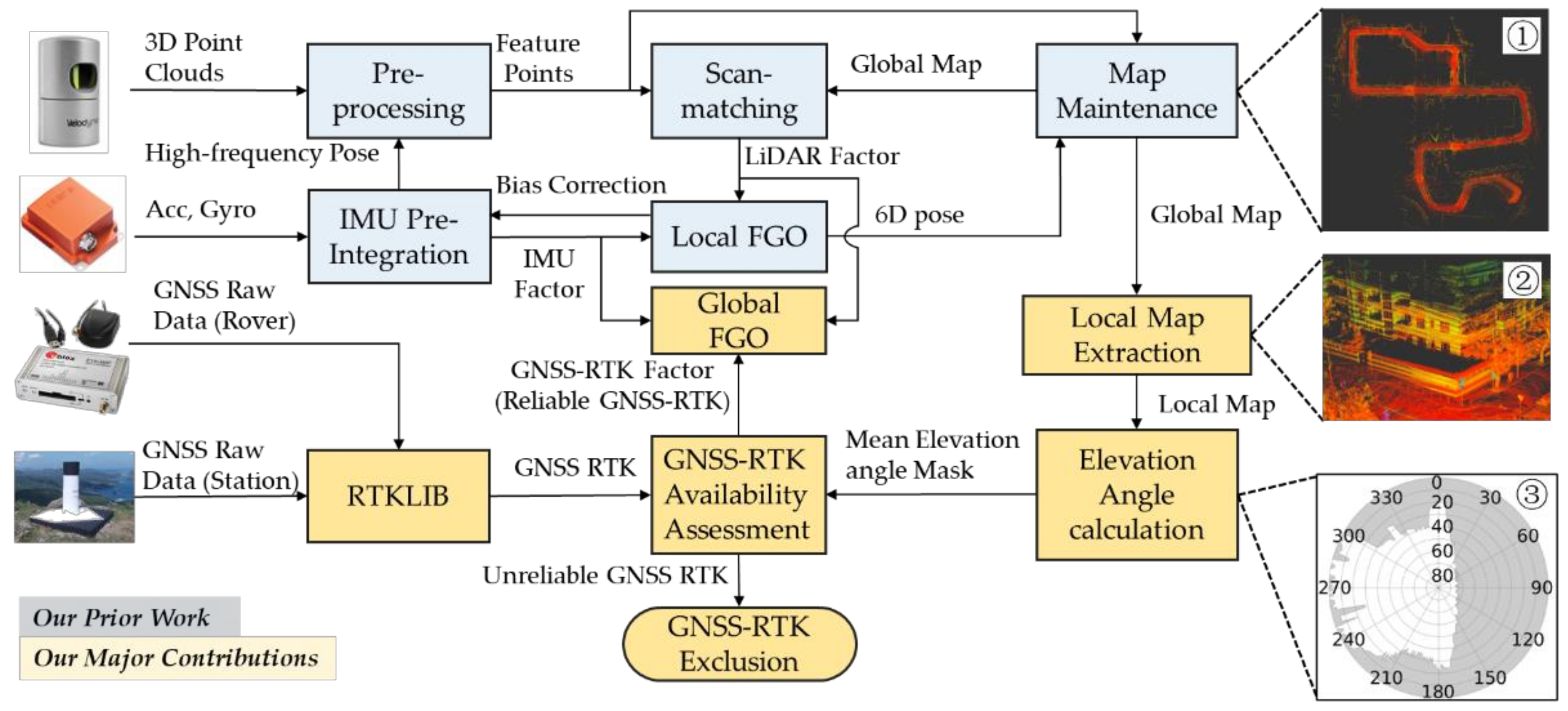
- This paper proposed a GNSS-RTK availability assessment method, during which, unreliable GNSS measurements rejection is performed through mean elevation angle mask evaluation exploiting the registered 3D map that was incrementally constructed by LIO based on our previous work in [33]. It is worth mentioning that the mean elevation angle in this paper is defined as that generated by the buildings around the GNSS receiver rather than the satellites.
- This paper proposed a GNSS-RTK/LIO integration scheme based on factor graph optimization. Concretely, the globally referenced positioning from reliable GNSS-RTK and relative pose estimation are integrated using the FGO [24] which is free of abnormal GNSS-RTK solutions.
- The effectiveness of the proposed GNSS-RTK availability assessment and the adaptive sensor fusion is validated on three typical urban canyons datasets collected in Hong Kong [9].
2. Materials and Methods
2.1. Overview of the Proposed Framework
- The LiDAR frame : Originated at the geometric center of the LiDAR.
- The IMU frame : Originated at the geometric center of the IMU.
- The GNSS measurement frame : Originated at the GNSS measurement with the orientation of the axes consistent with that of the LiDAR frame.
- The local world frame : Coincide with the initial LiDAR frame.
- The east-north-up (ENU) frame : Originated at the initial vehicle position with the x-axis, y-axis, and z-axis pointing to the east, north, and up respectively.
2.2. GNSS-RTK Availablity Assessment
2.3. Adaptive GNSS-RTK/LIO Fusion
3. Results
3.1. Experimental Setup
- Method1: This indicates the conventional GNSS/LIO fusion method [34,42,62] that directly integrates all the received GNSS-RTK measurements, among which LIO-SAM [42] is open-sourced. In the fusion method proposed in this paper, the threshold for GNSS availability would be set as equivalently. To be more convincing, the performance of LIO-SAM [42] is also evaluated.
- Method2: This indicates the adaptive GNSS/LIO fusion methods with a different threshold () in Equation (4) for the GNSS-RTK solution selection proposed in this paper. For urban-1, the threshold is selected as and For urban-2 and urban-3, besides these two thresholds, is additionally selected for a sufficient evaluation.
3.2. Experimental Results in Urban Canyon 1
3.2.1. Results of GNSS-RTK Availability Assessment
3.2.2. Positioning Results Comparison
3.3. Experimental Results in Urban Canyon 2
3.3.1. Results of GNSS-RTK Availability Assessment
3.3.2. Positioning Results Comparison
3.4. Experimental Results in Urban Canyon 3
3.4.1. Results of GNSS-RTK Availability Assessment
3.4.2. Positioning Results Comparison
4. Discussion
4.1. Performance of GNSS-RTK Availability Assessment
4.2. Performance of Adaptive GNSS-RTK/LIO Fusion
- The continuous and smooth GNSS-RTK positioning under urban canyons with LIO.
- The accumulated drift alleviation of LIO with GNSS-RTK.
- The superiority of the proposed adaptive GNSS-RTK/LIO integration.
5. Conclusions and Prospects
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Alatise, M.B.; Hancke, G.P. A review on challenges of autonomous mobile robot and sensor fusion methods. IEEE Access 2020, 8, 39830–39846. [Google Scholar] [CrossRef]
- Zhang, J.; Khoshelham, K.; Khodabandeh, A. Seamless Vehicle Positioning by Lidar-GNSS Integration: Standalone and Multi-Epoch Scenarios. Remote Sens. 2021, 13, 4525. [Google Scholar] [CrossRef]
- Wen, W.; Zhou, Y.; Zhang, G.; Fahandezh-Saadi, S.; Bai, X.; Zhan, W.; Tomizuka, M.; Hsu, L.-T. Urbanloco: A full sensor suite dataset for mapping and localization in urban scenes. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 August–31 May 2020; pp. 2310–2316. [Google Scholar]
- Chen, Y.; Tang, J.; Jiang, C.; Zhu, L.; Lehtomäki, M.; Kaartinen, H.; Kaijaluoto, R.; Wang, Y.; Hyyppä, J.; Hyyppä, H.; et al. The accuracy comparison of three simultaneous localization and mapping (SLAM)-based indoor mapping technologies. Sensors 2018, 18, 3228. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kaplan, E.D.; Hegarty, C. Understanding GPS/GNSS: Principles and Applications; Artech House: London, UK, 2017. [Google Scholar]
- Wen, W.; Hsu, L.-T. Towards Robust GNSS Positioning and Real-time Kinematic Using Factor Graph Optimization. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 5 June 2021; pp. 5884–5890. [Google Scholar]
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS, Jeju, Korea, 10 November 2009. [Google Scholar]
- Guvenc, I.; Chong, C.-C. A survey on TOA based wireless localization and NLOS mitigation techniques. IEEE Commun. Surv. Tutor. 2009, 11, 107–124. [Google Scholar] [CrossRef]
- Hsu, L.-T.; Kubo, N.; Wen, W.; Chen, W.; Liu, Z.; Suzuki, T.; Meguro, J. UrbanNav: An open-sourced multisensory dataset for benchmarking positioning algorithms designed for urban areas. In Proceedings of the 34th International Technical Meeting of the Satellite Division of The Institute of Navigation, St. Louis, MO, USA, 20–24 September 2021; pp. 226–256. [Google Scholar]
- Furukawa, R.; Kubo, N.; El-Mowafy, A. Prediction of RTK-GNSS Performance in Urban Environments Using a 3D model and Continuous LoS Method. In Proceedings of the 2020 International Technical Meeting of The Institute of Navigation, San Diego, CA, USA, 21–24 January 2020; pp. 763–771. [Google Scholar]
- Groves, P.D. Principles of GNSS, inertial, and multisensor integrated navigation systems. IEEE Aerosp. Electron. Syst. Mag. 2015, 30, 26–27. [Google Scholar] [CrossRef]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.; Leonard, J.J. Past, present, and future of simultaneous localization and mapping: Toward the robust-perception age. IEEE Trans. Robot. 2016, 32, 1309–1332. [Google Scholar] [CrossRef] [Green Version]
- Luo, R.C.; Yih, C.-C.; Su, K.L. Multisensor fusion and integration: Approaches, applications, and future research directions. IEEE Sens. J. 2002, 2, 107–119. [Google Scholar] [CrossRef]
- Hajiyev, C.; Soken, H.E. Robust adaptive Kalman filter for estimation of UAV dynamics in the presence of sensor/actuator faults. Aerosp. Sci. Technol. 2013, 28, 376–383. [Google Scholar] [CrossRef]
- Cui, B.; Chen, X.; Xu, Y.; Huang, H.; Liu, X. Performance analysis of improved iterated cubature Kalman filter and its application to GNSS/INS. ISA Trans. 2017, 66, 460–468. [Google Scholar] [CrossRef]
- Luo, X.; Wang, H. Robust adaptive Kalman filtering—A method based on quasi-accurate detection and plant noise variance–covariance matrix tuning. J. Navig. 2017, 70, 137–148. [Google Scholar] [CrossRef]
- Zhang, G.; Hsu, L.-T. Intelligent GNSS/INS integrated navigation system for a commercial UAV flight control system. Aerosp. Sci. Technol. 2018, 80, 368–380. [Google Scholar] [CrossRef]
- Pal, M. Random forest classifier for remote sensing classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Zhu, J.; Li, F.; Li, Q.; Che, H. A hybrid fuzzy method for performance evaluation of fusion algorithms for integrated navigation system. Aerosp. Sci. Technol. 2017, 69, 226–235. [Google Scholar] [CrossRef]
- Godha, S.; Cannon, M. GPS/MEMS INS integrated system for navigation in urban areas. GPS Solut. 2007, 11, 193–203. [Google Scholar] [CrossRef]
- Gelb, A. Applied Optimal Estimation; MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Li, T.; Zhang, H.; Gao, Z.; Chen, Q.; Niu, X. High-Accuracy Positioning in Urban Environments Using Single-Frequency Multi-GNSS RTK/MEMS-IMU Integration. Remote Sens. 2018, 10, 205. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Zhang, L.; Wang, X. Loosely Coupled GNSS/INS Integration Based on Factor Graph and Aided by ARIMA Model. IEEE Sens. J. 2021, 21, 24379–24387. [Google Scholar] [CrossRef]
- Dellaert, F.; Kaess, M. Factor graphs for robot perception. Found. Trends Robot. 2017, 6, 1–139. [Google Scholar] [CrossRef]
- Li, T.; Zhang, H.; Niu, X.; Gao, Z. Tightly-Coupled Integration of Multi-GNSS Single-Frequency RTK and MEMS-IMU for Enhanced Positioning Performance. Sensors 2017, 17, 2462. [Google Scholar] [CrossRef] [Green Version]
- Ji, X.; Zuo, L.; Zhang, C.; Liu, Y. Lloam: Lidar odometry and mapping with loop-closure detection based correction. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–8 August 2019; pp. 2475–2480. [Google Scholar]
- Lin, J.; Zhang, F. Loam livox: A fast, robust, high-precision LiDAR odometry and mapping package for LiDARs of small FoV. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May 2020–31 August 2020; pp. 3126–3131. [Google Scholar]
- Neuhaus, F.; Koß, T.; Kohnen, R.; Paulus, D. Mc2slam: Real-time inertial lidar odometry using two-scan motion compensation. In Proceedings of the German Conference on Pattern Recognition, Stuttgart, Germany, 9–12 October 2018; pp. 60–72. [Google Scholar]
- Kukko, A.; Kaartinen, H.; Hyyppä, J.; Chen, Y. Multiplatform Mobile Laser Scanning: Usability and Performance. Sensors 2012, 12, 11712–11733. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Ma, H.; Jiang, C.; Zhou, B.; Xue, W.; Xiao, Z.; Li, Q. NDT-LOAM: A Real-Time Lidar Odometry and Mapping With Weighted NDT and LFA. IEEE Sens. J. 2021, 22, 3660–3671. [Google Scholar] [CrossRef]
- Qin, C.; Ye, H.; Pranata, C.E.; Han, J.; Zhang, S.; Liu, M. Lins: A lidar-inertial state estimator for robust and efficient navigation. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May 2020–31 August 2020; pp. 8899–8906. [Google Scholar]
- Ye, H.; Chen, Y.; Liu, M. Tightly coupled 3D lidar inertial odometry and mapping. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 3144–3150. [Google Scholar]
- Zhang, J.; Wen, W.; Huang, F.; Chen, X.; Hsu, L.-T. Coarse-to-Fine Loosely-Coupled LiDAR-Inertial Odometry for Urban Positioning and Mapping. Remote Sens. 2021, 13, 2371. [Google Scholar] [CrossRef]
- Chang, L.; Niu, X.; Liu, T.; Tang, J.; Qian, C. GNSS/INS/LiDAR-SLAM integrated navigation system based on graph optimization. Remote Sens. 2019, 11, 1009. [Google Scholar] [CrossRef] [Green Version]
- Huang, F.; Wen, W.; Zhang, J.; Hsu, L.-T. Point wise or Feature wise? Benchmark Comparison of Public Available LiDAR Odometry Algorithms in Urban Canyons. arXiv 2021, arXiv:210405203. [Google Scholar]
- Anand, B.; Senapati, M.; Barsaiyan, V.; Rajalakshmi, P. LiDAR-INS/GNSS Based Real-Time Ground Removal, Segmentation and Georeferencing Framework for Smart Transportation. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]
- Senapati, M.; Anand, B.; Barsaiyan, V.; Rajalakshmi, P. Geo-referencing system for locating objects globally in LiDAR point cloud. In Proceedings of the 2020 IEEE 6th World Forum on Internet of Things (WF-IoT), New Orleans, LA, USA, 2–16 June 2020; pp. 1–5. [Google Scholar]
- Gao, Y.; Liu, S.; Atia, M.M.; Noureldin, A. INS/GPS/LiDAR Integrated Navigation System for Urban and Indoor Environments Using Hybrid Scan Matching Algorithm. Sensors 2015, 15, 23286–23302. [Google Scholar] [CrossRef] [Green Version]
- Chiang, K.-W.; Tsai, G.-J.; Chu, H.-J.; El-Sheimy, N. Performance enhancement of INS/GNSS/Refreshed-SLAM integration for acceptable lane-level navigation accuracy. IEEE Trans. Veh. Technol. 2020, 69, 2463–2476. [Google Scholar] [CrossRef]
- Wan, G.; Yang, X.; Cai, R.; Li, H.; Zhou, Y.; Wang, H.; Song, S. Robust and precise vehicle localization based on multi-sensor fusion in diverse city scenes. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–24 May 2018; pp. 4670–4677. [Google Scholar]
- Wen, W.; Pfeifer, T.; Bai, X.; Hsu, L. Factor graph optimization for GNSS/INS integration: A comparison with the extended Kalman filter. Navigation 2021, 68, 315–331. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. Lio-sam: Tightly-coupled lidar inertial odometry via smoothing and mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 5135–5142. [Google Scholar]
- Zhang, J.; Singh, S. Low-drift and real-time lidar odometry and mapping. Auton. Robot. 2017, 41, 401–416. [Google Scholar] [CrossRef]
- Forster, C.; Carlone, L.; Dellaert, F.; Scaramuzza, D. On-Manifold Preintegration for Real-Time Visual–Inertial Odometry. IEEE Trans. Robot. 2016, 33, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Barfoot, T.D. State Estimation for Robotics; Cambridge University Press: Cambridge, UK, 2017; pp. 205–284. [Google Scholar]
- Karney, C. GeographicLib. Available online: https://geographiclib.sourceforge.io/ (accessed on 24 October 2021).
- Ribeiro, M.I. Kalman and extended kalman filters: Concept, derivation and properties. Inst. Syst. Robot. 2004, 43, 46. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 1995. [Google Scholar]
- Lindley, D.V. Fiducial distributions and Bayes’ theorem. J. R. Stat. Soc. Ser. B 1958, 20, 102–107. [Google Scholar] [CrossRef]
- Gao, X.; Zhang, T.; Liu, Y.; Yan, Q. 14 Lectures on Visual SLAM: From Theory to Practice; Publishing House of Electronics Industry: Beijing, China, 2017. [Google Scholar]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot. 2018, 34, 1004–1020. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Soatto, S.; Košecká, J.; Sastry, S. An Invitation to 3-d Vision: From Images to Geometric Models; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Palas, F.J. A Rodrigues’ Formula. Am. Math. Mon. 1959, 66, 402–404. [Google Scholar] [CrossRef]
- Zhang, Z. Parameter estimation techniques: A tutorial with application to conic fitting. Image Vis. Comput. 1997, 15, 59–76. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; Teunissen, P.J.G.; El-Mowafy, A. The ADOP and PDOP: Two Complementary Diagnostics for GNSS Positioning. J. Surv. Eng. 2020, 146, 04020008. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.; Odijk, D.; Jong, C. Ambiguity dilution of precision: An additional tool for GPS quality control. LGR-Ser. Delft Geod. Comput. Cent. Delft 2000, 21, 261–270. [Google Scholar]
- Moré, J.J. The levenberg-marquardt algorithm: Implementation and theory. In Numerical Analysis; Springer: Berlin, Germany, 1978; pp. 105–116. [Google Scholar]
- Agarwal, S.; Mierle, K. Ceres Solver. Available online: http://ceres-solver.org (accessed on 6 January 2021).
- Grisetti, G.; Kümmerle, R.; Strasdat, H.; Konolige, K. g2o: A general framework for (hyper) graph optimization. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 3607–3613. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; p. 5. [Google Scholar]
- Grupp, M. evo: Python Package for the Evaluation of Odometry and SLAM. 2017. Available online: https://github.com/MichaelGrupp/evo (accessed on 1 March 2021).
- Li, N.; Guan, L.; Gao, Y.; Du, S.; Wu, M.; Guang, X.; Cong, X. Indoor and outdoor low-cost seamless integrated navigation system based on the integration of INS/GNSS/LIDAR system. Remote Sens. 2020, 12, 3271. [Google Scholar] [CrossRef]
- Hsu, L.-T. Analysis and modeling GPS NLOS effect in highly urbanized area. GPS Solutions 2017, 22, 7. [Google Scholar] [CrossRef] [Green Version]
- McCormac, J.; Handa, A.; Davison, A.; Leutenegger, S. Semanticfusion: Dense 3d semantic mapping with convolutional neural networks. In Proceedings of the 2017 IEEE International Conference on Robotics and automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4628–4635. [Google Scholar]
- Johnson, D.D.; Pittelman, S.D.; Heimlich, J.E. Semantic mapping. Read. Teach. 1986, 39, 778–783. [Google Scholar]
- Yue, Y.; Zhao, C.; Li, R.; Yang, C.; Zhang, J.; Wen, M.; Wang, Y.; Wang, D. A hierarchical framework for collaborative probabilistic semantic mapping. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 9659–9665. [Google Scholar]
- Wen, W.W.; Zhang, G.; Hsu, L.-T. GNSS NLOS Exclusion Based on Dynamic Object Detection Using LiDAR Point Cloud. IEEE Trans. Intell. Transp. Syst. 2019, 22, 853–862. [Google Scholar] [CrossRef]
- Wen, W.; Zhang, G.; Hsu, L. Correcting NLOS by 3D LiDAR and building height to improve GNSS single point positioning. Navigation 2019, 66, 705–718. [Google Scholar] [CrossRef]
- Chen, S.; Liu, J.; Liang, X.; Zhang, S.; Hyyppä, J.; Chen, R. A novel calibration method between a camera and a 3D LiDAR with infrared images. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 4963–4969. [Google Scholar]
- Furgale, P.; Rehder, J.; Siegwart, R. Unified temporal and spatial calibration for multi-sensor systems. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1280–1286. [Google Scholar]
- Kelly, J.; Sukhatme G, S. Visual-inertial sensor fusion: Localization, mapping and sensor-to-sensor self-calibration. Int. J. Robot. Res. 2011, 30, 56–79. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Length (km) | Urbanization | U-Blox RECEIVER |
|---|---|---|---|
| UrbanNav-HK-Data20190428 [9] (urban-1) [9] | 2.01 | Medium | M8T |
| UrbanNav-HK-Deep-Urban-1 [9] (urban_2) | 2.37 | Deep | M8T |
| UrbanNav-HK-Data20210714 1 (urban-3) | 4.3 | Medium | F9P |
| Settings | Urban-1 | Urban-2 | Urban-3 |
|---|---|---|---|
| Integer Ambiguity Resolution | Instantaneous | Instantaneous | Instantaneous |
| Min Ratio to Fix Ambiguity | 3.0 | 3.0 | 3.0 |
| Elevation Masking | 15 degree | 15 degree | 15 degree |
| Ephemeris | Hong Kong Land Department | Hong Kong Land Department | Hong Kong Land Department |
| Frequency | L1 + L2/E5b | L1 + L2 + L5 | L1 + L2 + L5 |
| Navigation System | GPS/BeiDou/Glonasss | GPS/Galileo/BDS | GPS/Galileo/BDS |
| Dataset | Method | ATE (m) | |
|---|---|---|---|
| RMSE | |||
| Urban-1 | Alone GNSS RTK | - | 42.02 |
| LIO | - | 3.99 | |
| LIO-SAM | - | 19.89 | |
| Adaptive Integrated GNSS-RTK/LIO | 90 | 25.330 | |
| 35 | 18.881 | ||
| 15 | 4.123 |
| Dataset | Method | ATE (m) | |
|---|---|---|---|
| RMSE | |||
| Urban-2 | Alone GNSS RTK | - | 15.75 |
| LIO | - | 1.80 | |
| LIO-SAM | - | 13.64 | |
| Adaptive Integrated GNSS-RTK/LIO | 90 | 8.58 | |
| 35 | 8.65 | ||
| 20 | 4.86 | ||
| 15 | 1.74 |
| Dataset | Method | ATE (m) | |
|---|---|---|---|
| RMSE | |||
| Urban-3 | Alone GNSS RTK | - | 22.23 |
| LIO | - | 11.43 | |
| LIO-SAM | - | 38.18 | |
| Adaptive Integrated GNSS-RTK/LIO | 90 | 39.71 | |
| 35 | 29.28 | ||
| 20 | 13.43 | ||
| 15 | 10.02 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Wen, W.; Huang, F.; Wang, Y.; Chen, X.; Hsu, L.-T. GNSS-RTK Adaptively Integrated with LiDAR/IMU Odometry for Continuously Global Positioning in Urban Canyons. Appl. Sci. 2022, 12, 5193. https://doi.org/10.3390/app12105193
Zhang J, Wen W, Huang F, Wang Y, Chen X, Hsu L-T. GNSS-RTK Adaptively Integrated with LiDAR/IMU Odometry for Continuously Global Positioning in Urban Canyons. Applied Sciences. 2022; 12(10):5193. https://doi.org/10.3390/app12105193
Chicago/Turabian StyleZhang, Jiachen, Weisong Wen, Feng Huang, Yongliang Wang, Xiaodong Chen, and Li-Ta Hsu. 2022. "GNSS-RTK Adaptively Integrated with LiDAR/IMU Odometry for Continuously Global Positioning in Urban Canyons" Applied Sciences 12, no. 10: 5193. https://doi.org/10.3390/app12105193
APA StyleZhang, J., Wen, W., Huang, F., Wang, Y., Chen, X., & Hsu, L. -T. (2022). GNSS-RTK Adaptively Integrated with LiDAR/IMU Odometry for Continuously Global Positioning in Urban Canyons. Applied Sciences, 12(10), 5193. https://doi.org/10.3390/app12105193