
Synchronization Sliding Mode Control of Closed-Kinematic Chain Robot Manipulators with Time-Delay Estimation


Abstract
:1. Introduction
- (1)
- Unlike the above-mentioned control schemes, the proposed control scheme TDE-based NFTSMC with synchronization is proposed for the first time.
- (2)
- A new control scheme is proposed based on the combination of TDE-based NFTSMC and synchronization control.
- (3)
- The proposed control scheme is to optimally synchronize the robot joints to minimize the synchronization errors with a NFTSMC-based controller while the robot dynamics and disturbances are estimated and compensated by a TDE-based subsystem.
2. Structure of the Control Scheme
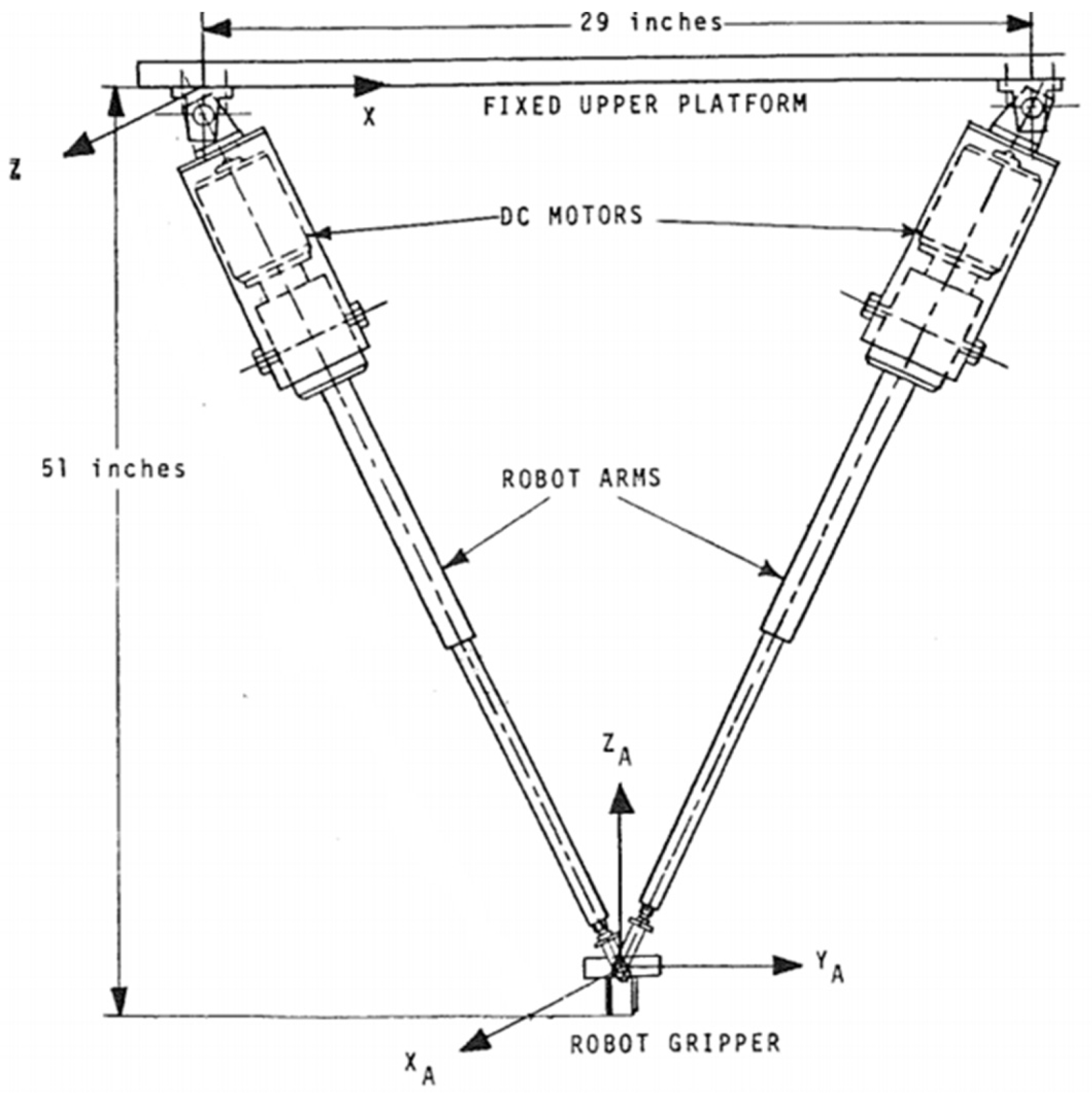
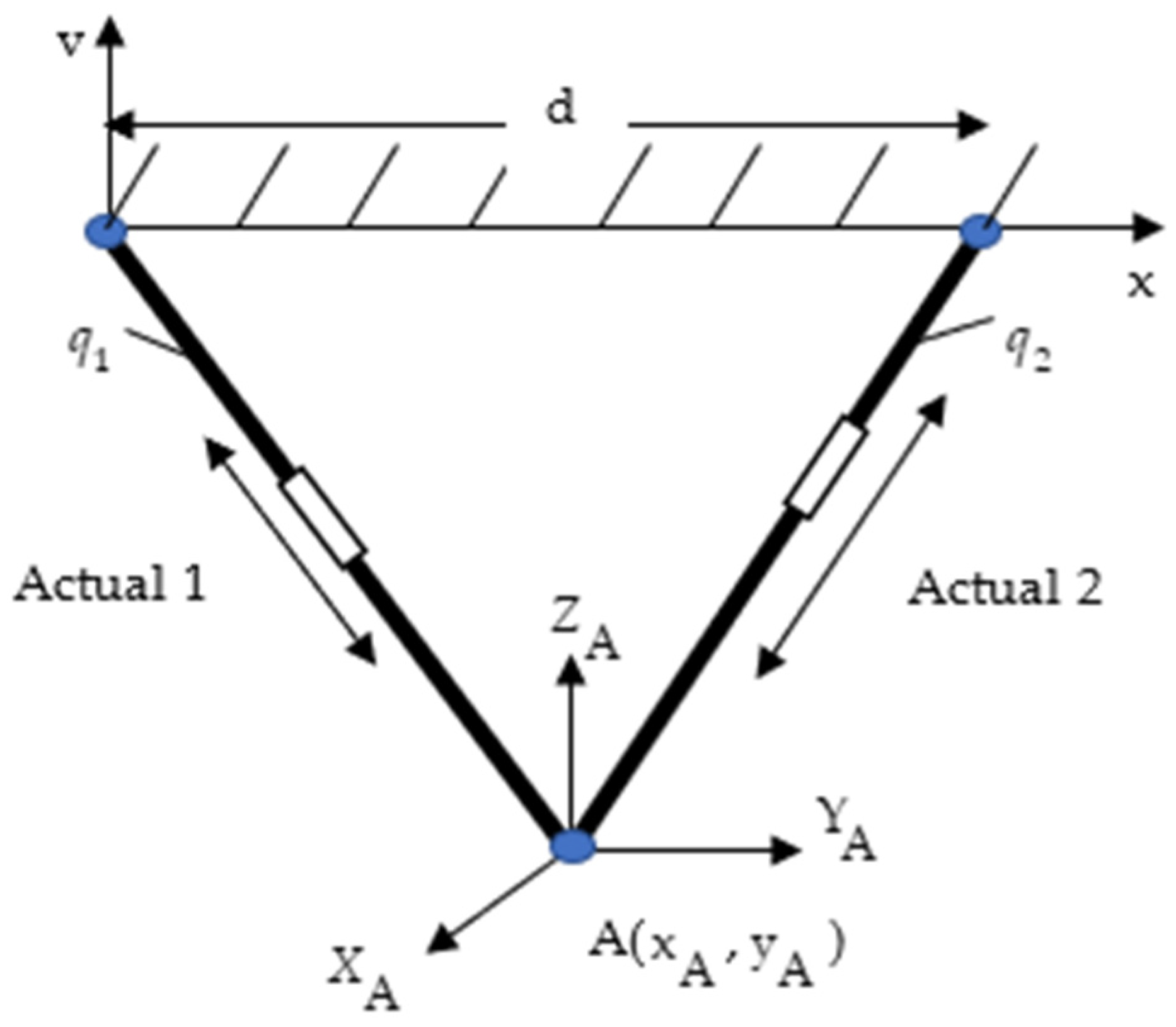
2.1. Kinematic Scheme of the CKCM
2.2. Structure of the Proposed Control Scheme
- : the desired Cartesian configuration vector. (Note: Configuration means both position and orientation of the CKCM);
- , and : the desired joint vector, actual joint vector, and actual acceleration vector, of the CKCM, respectively;
- : the synchronization error vector;
- : the control law vector of the NFTSMC;
- : constant, diagonal matrix selected by the TDE;
- : the output vector of the NFTSMC Subsystem;
- : the compensated control input vector to the CKCM;
- : the external disturbances vector;
- L: the estimate time delay of the TDE;
- and : the past acceleration vector and past control input vector of the CKCM, respectively;
- : the estimate of all nonlinear terms including the inertia uncertainty, Coriolis/centripetal vector, gravitational vector, friction vector, and disturbances.
3. Control Scheme Analysis without TDE
4. Description of Subsystems
4.1. The Synchronization Subsystem
4.2. The NFTSMC and TDE Subsystems
4.2.1. Preliminaries and Notations
4.2.2. The NFTSMC and TDE Sybstems Design
5. Stability Analysis
- (a)
- ;
- (b)
- .
6. Computer Simulation Study
6.1. Simulation Setup
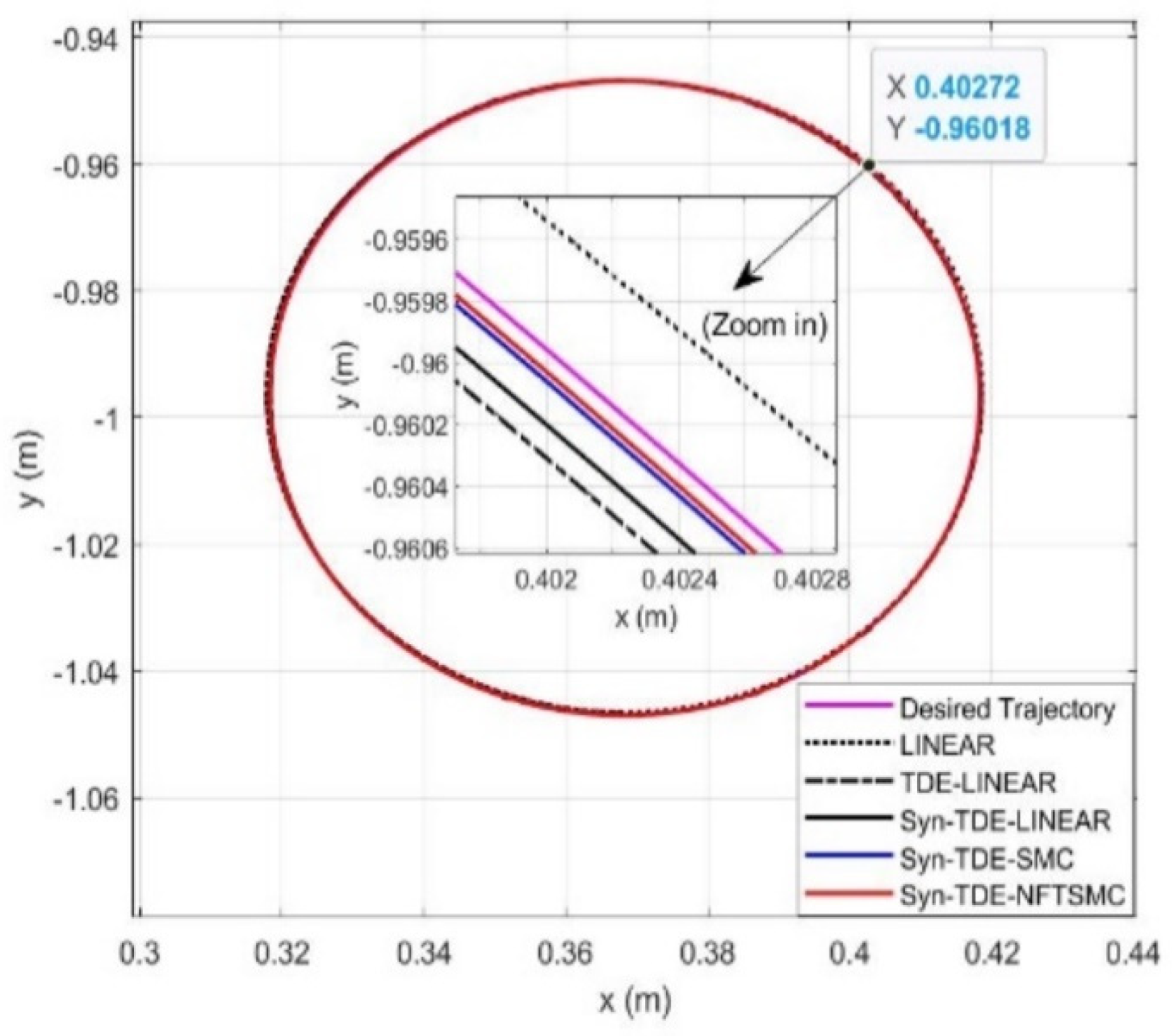
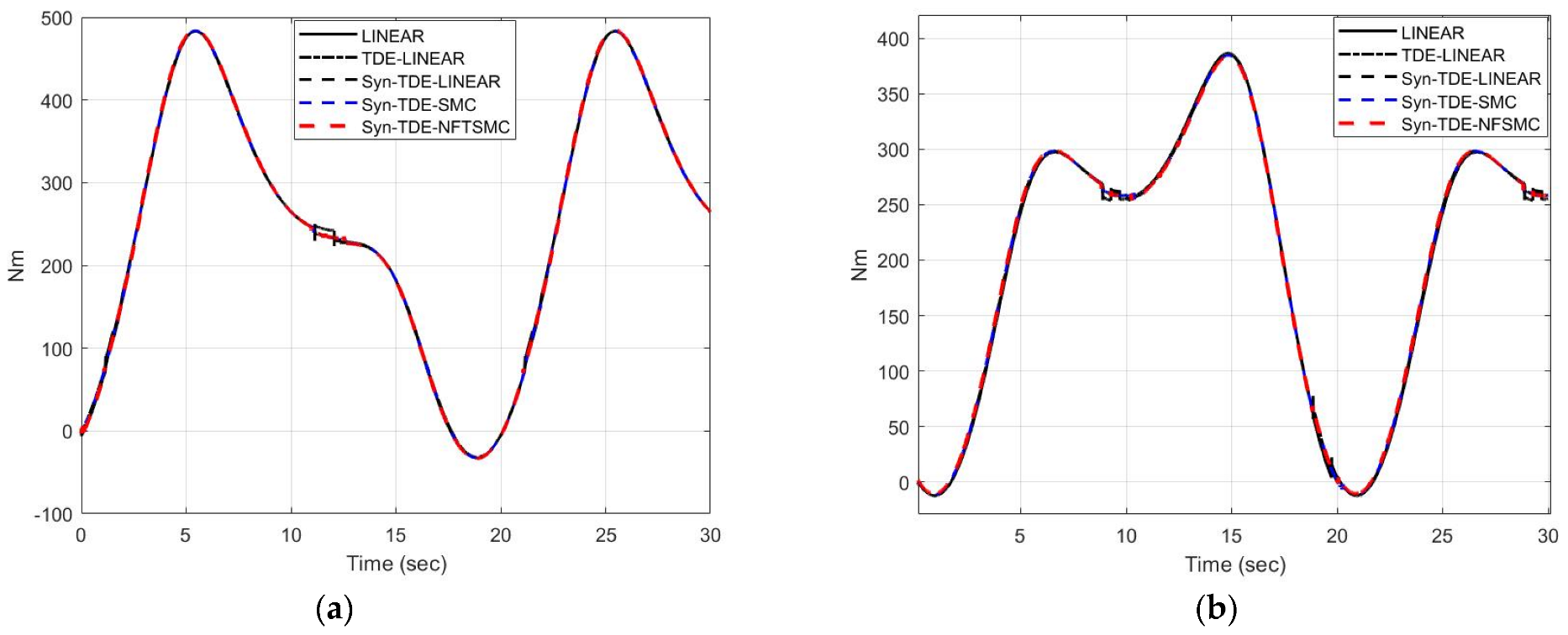
6.2. Simulation Results
7. Conclusions
- (1)
- The proposed control scheme optimally synchronized the robot joints to minimize the synchronization errors with an NFTSMC-based controller.
- (2)
- Since the proposed control scheme does not require the computation of the manipulator dynamics thanks to TDE, it is computationally efficent and is, therefore, suitable for real-time control applications.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Other Control Schemes Used in Computer Simulation
References
- Patel, Y.D.; George, P.M. Parallel Manipulators Applications—A Survey. Mod. Mech. Eng. 2012, 2, 57–64. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, C.C.; Pooran, F.J. Kinematic analysis and workspace determination of a 6 dof CKCM robot end-effector. J. Mech. Work. Technol. 1989, 20, 283. [Google Scholar] [CrossRef]
- Nguyen, C.C.; Pooran, F.J. Dynamic analysis of a 6 DOF CKCM robot end-effector for dual-arm telerobot systems. Robot. Auton. Syst. 1989, 5, 377. [Google Scholar] [CrossRef]
- Nguyen, C.C.; Sam, S.A.; Zhen, L.Z.; Campbell, C.E., Jr. Adaptive control of a stewart platform-based manipulator. J. Robot. Syst. 1993, 10, 657. [Google Scholar] [CrossRef]
- Koren, Y. Cross-Coupled Biaxial Computer Control for Manufacturing Systems. J. Dyn. Syst. Meas. Control 1980, 102, 265. [Google Scholar] [CrossRef]
- Doan, Q.V.; Le, T.D.; Vo, A.T. Synchronization Full-Order Terminal Sliding Mode Control for an Uncertain 3-DOF Planar Parallel Robotic Manipulator. Appl. Sci. 2019, 9, 1756. [Google Scholar] [CrossRef] [Green Version]
- Zhao, D.; Li, S.; Gao, F. Finite time position synchronised control for parallel manipulators using fast terminal sliding mode. Int. J. Syst. Sci. 2009, 40, 829. [Google Scholar] [CrossRef]
- Nguyen, T.T. Intelligent Control of Closed-Kinematic Chain Robot Manipulators. Ph.D. Thesis, The Catholic University of America, Washington, DC, USA, 2020. [Google Scholar]
- Su, Y.; Sun, D.; Ren, L.; Mills, J.K. Integration of saturated PI synchronous control and PD feedback for control of parallel manipulators. IEEE Trans. Robot. A Publ. IEEE Robot. Autom. Soc. 2006, 22, 202. [Google Scholar] [CrossRef]
- Sang, C.; Cong, S. Nonlinear computed torque control for a high-speed planar parallel manipulator. Mechatronics 2009, 19, 987. [Google Scholar] [CrossRef]
- Chung, S.J.; Slotine, J.J.E. Cooperative robot control and synchronization of Lagrangian systems. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007. [Google Scholar]
- Nuno, E.; Basanez, L.; Ortega., R. Adaptive control for the synchronization of multiple robot manipulators with coupling time-delays. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010. [Google Scholar] [CrossRef]
- Duong, T.; Tran, T.D.; Nguyen, T.T.; Duong, V.N. Synchronization Sliding Mode Control with Time-Delay Estimation for a 2-DOF Closed-Kinematic Chain Robot Manipulator. In Proceedings of the International Conference on System Science and Engineering (ICSSE), Ho Chi Minh City, Vietnam, 26–28 August 2021. [Google Scholar] [CrossRef]
- Bouaziz, F.A.; Bouteraa, Y.; Medhaffar, H. Distributed sliding mode control of cooperative robotic manipulators. In Proceedings of the 10th International Multi-Conferences on Systems, Signals & Devices 2013 (SSD13), Hammamet, Tunisia, 18–21 March 2013. [Google Scholar] [CrossRef]
- Zhao, D.; Li, S.; Gao, F. Fully adaptive feedforward feedback synchronized tracking control for Stewart Platform systems. Int. J. Control Autom. Syst. 2008, 6, 689–701. [Google Scholar]
- Su, Y.X.; Sun, D.; Ren, L.; Wang, X.; Mills, J.K. Nonlinear PD Synchronized Control for Parallel Manipulators. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005. [Google Scholar] [CrossRef]
- Zhao, D.; Li, S.; Gao, F. A new terminal sliding mode control for robotic manipulators. Int. J. Control 2009, 82, 1804. [Google Scholar] [CrossRef]
- Zhihong, M.; Paplinski, A.P.; Wu, H.R. A robust MIMO terminal sliding mode control scheme for rigid robotic manipulators. IEEE Trans. Autom. Control 1994, 39, 2464. [Google Scholar] [CrossRef]
- Tang, Y. Terminal sliding mode control for rigid robots. Automatica 1998, 34, 51. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2011, 21, 1865. [Google Scholar] [CrossRef]
- Van, M.; Ge, S.S.; Ren, H. Finite Time Fault Tolerant Control for Robot Manipulators Using Time Delay Estimation and Continuous Nonsingular Fast Terminal Sliding Mode Control. IEEE Trans. Cybern. 2017, 47, 1681. [Google Scholar] [CrossRef]
- Hsia, T.C.S.; Lasky, T.A.; Guo, Z. Robust independent joint controller design for industrial robot manipulators. IEEE Trans. Ind. Electron. A Publ. IEEE Ind. Electron. Soc. 1991, 38, 21. [Google Scholar] [CrossRef]
- Baek, J.; Cho, S.; Han, S. Practical Time-Delay Control with Adaptive Gains for Trajectory Tracking of Robot Manipulators. IEEE Trans. Ind. Electron. A Publ. IEEE Ind. Electron. Soc. 2018, 65, 5682. [Google Scholar] [CrossRef]
- Bae, H.-J.; Jin, M.; Suh, J.; Lee, J.Y.; Chang, P.-H.; Ahn, D.-s. Control of Robot Manipulators Using Time-Delay Estimation and Fuzzy Logic Systems. J. Electr. Eng. Technol. 2017, 12, 1271. [Google Scholar] [CrossRef] [Green Version]
- Maolin, J.; Jinoh, L.; Pyung, H.C.; Chintae, C. Practical Nonsingular Terminal Sliding-Mode Control of Robot Manipulators for High-Accuracy Tracking Control. IEEE Trans. Ind. Electron. A Publ. IEEE Ind. Electron. Soc. 2009, 56, 3593. [Google Scholar] [CrossRef]
- Kelly, R.; Davila, V.S.; Loría, A. Control of Robot Manipulators in Joint Space, 1st ed.; Springer: London, UK, 2005; pp. XXVI, 426. [Google Scholar] [CrossRef]
- Xu, Z.; Huang, W.; Li, Z.; Hu, L.; Lu, P. Nonlinear Nonsingular Fast Terminal Sliding Mode Control Using Deep Deterministic Policy Gradient. Appl. Sci. 2021, 11, 4685. [Google Scholar] [CrossRef]
- Feng, Y.; Yu, X.; Man, Z. Non-singular terminal sliding mode control of rigid manipulators. Automatica 2002, 38, 2159. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Birkhäuser: Basel, Switzerland, 2014. [Google Scholar]
- Su, W.-C.; Drakunov, S.V.; Ozguner, U. An O(T/sup 2/) boundary layer in sliding mode for sampled-data systems. IEEE Trans. Autom. Control 2000, 45, 482. [Google Scholar] [CrossRef]
- Spong, M.; Vidyasagar, M. Robust linear compensator design for nonlinear robotic control. IEEE Trans. Robot. Autom. A Publ. IEEE Robot. Autom. Soc. 1987, 3, 345. [Google Scholar] [CrossRef]
- Brunton, S.L.; Kutz, J.N. Data-Driven Science and Engineering; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar] [CrossRef] [Green Version]
- Pooran, J.F. Dynamics and Control of Robot Manipulators with Closed-Kinematic Chain Mechanism. Ph.D. Thesis, The Catholic University of America, Washington, DC, USA, 1989. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot Parameters | Description | Value | Unit |
|---|---|---|---|
| Link’s total mass | 4.91 | kg | |
| Link’s moving part mass | 0.59 | kg | |
| Grounds’ horizontal distance | 0.74 | m | |
| Link’s fixed length | 0.26 | m | |
| Viscous friction coefficient of the 1st link | 5 | N·m·s/rad | |
| Viscous friction coefficient of the 2nd link | 5 | N·m·s/rad | |
| Coulomb friction coefficient of the 1st link | 5 | N·m | |
| Coulomb friction coefficient of the 2nd link | 5 | N·m | |
| g | Gravitational acceleration constant | 9.81 | m/s2 |
| Control Scheme | Control Parameters |
|---|---|
| LINEAR | ) |
| TDE-LINEAR | ) |
| Syn-TDE-LINEAR | = diag(0.5,0.5) |
| Syn-TDE-SMC | = diag(0.5, 0.5) |
| Syn-TDE-NFTSMC |
| Tracking Errors | LINEAR | TDE-LINEAR | Syn-TDE-LINEAR | Syn-TDE-SMC | Syn-TDE-NFTSMC |
|---|---|---|---|---|---|
| (mm) | 0.32 | 0.0197 | 0.0197 | ||
| (mm) | 0.26 | 0.0192 | 0.0192 |
| Tracking Errors | Syn-TDE-LINEAR | Syn-TDE-SMC | Syn-TDE-NFTSMC |
|---|---|---|---|
| (mm) | 0.0206 | ||
| (mm) | 0.0206 | ||
| (mm) | 0.028 | ||
| (mm) | 0.016 |
| AAEE | Syn-TDE-NFTSMC |
|---|---|
| (Nm) | 0.0177 |
| (Nm) | 0.0172 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duong, T.T.C.; Nguyen, C.C.; Tran, T.D. Synchronization Sliding Mode Control of Closed-Kinematic Chain Robot Manipulators with Time-Delay Estimation. Appl. Sci. 2022, 12, 5527. https://doi.org/10.3390/app12115527
Duong TTC, Nguyen CC, Tran TD. Synchronization Sliding Mode Control of Closed-Kinematic Chain Robot Manipulators with Time-Delay Estimation. Applied Sciences. 2022; 12(11):5527. https://doi.org/10.3390/app12115527
Chicago/Turabian StyleDuong, Tu Thi Cam, Charles C. Nguyen, and Thien Duc Tran. 2022. "Synchronization Sliding Mode Control of Closed-Kinematic Chain Robot Manipulators with Time-Delay Estimation" Applied Sciences 12, no. 11: 5527. https://doi.org/10.3390/app12115527
APA StyleDuong, T. T. C., Nguyen, C. C., & Tran, T. D. (2022). Synchronization Sliding Mode Control of Closed-Kinematic Chain Robot Manipulators with Time-Delay Estimation. Applied Sciences, 12(11), 5527. https://doi.org/10.3390/app12115527