
A Novel Reference Governor for Disturbance Observer-Based Load Pressure Control in a Dual-Actuator-Driven Electrohydraulic Actuator



Abstract
:1. Introduction
- (1)
- The proposed load pressure tracking controller can estimate the plant’s lumped disturbance caused by uncertain parameters to improve the robustness of the closed-loop system. In addition, a mid-range controller that dynamically allocates the command to the pump and proportional valve is used, which can make the best of the higher bandwidth of the proportional valve and keep the valve position close to the midpoint of its range.
- (2)
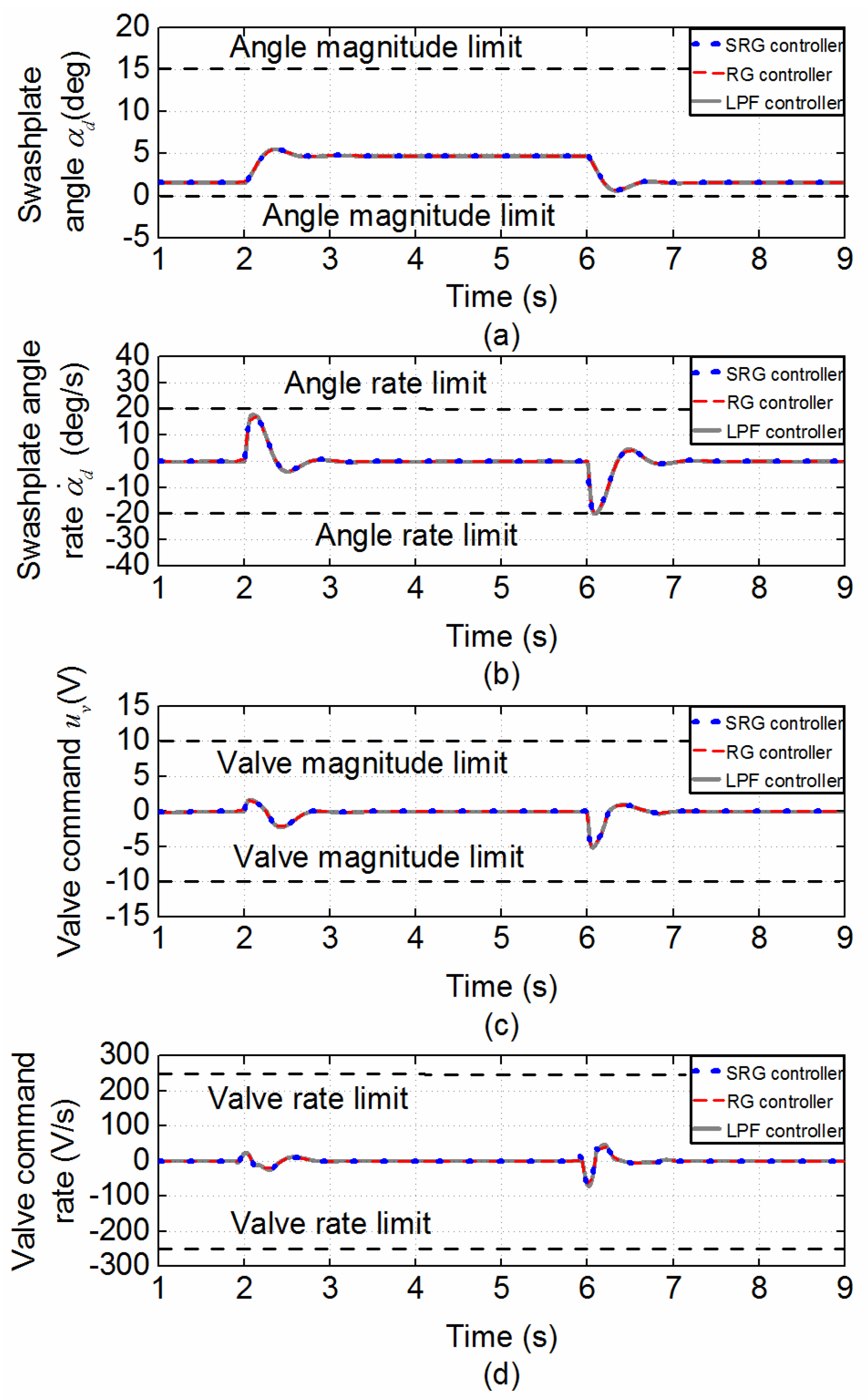
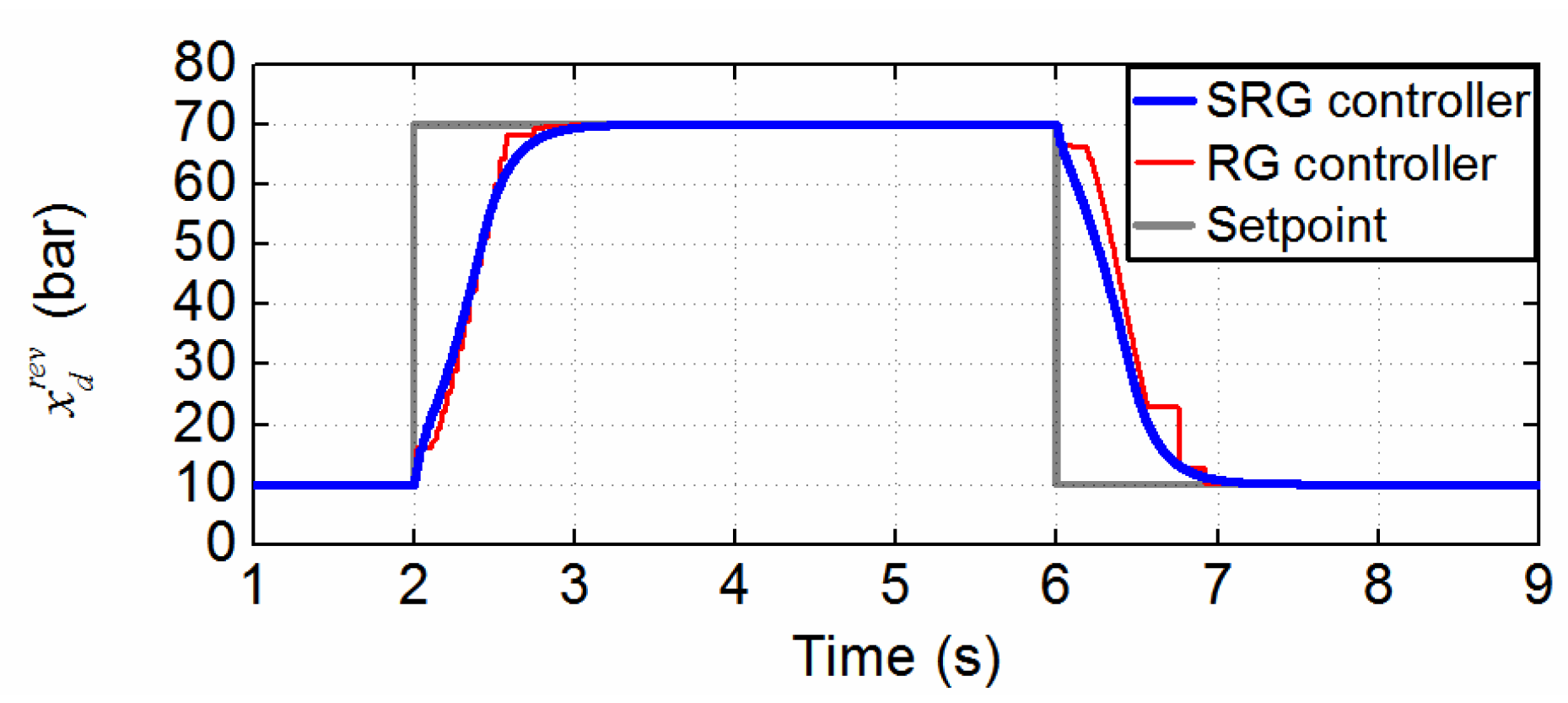
- A novel reference governor is augmented to ensure that the rate and magnitude constraints of the pump and the valve are not violated. If constraint violation is foreseen, the pressure reference trajectory will be reduced. The proposed method can generate smoother pressure trajectories than nominal reference governors, and therefore, it will not excite high-frequency modes, which helps to improve the model accuracy used in the prediction.
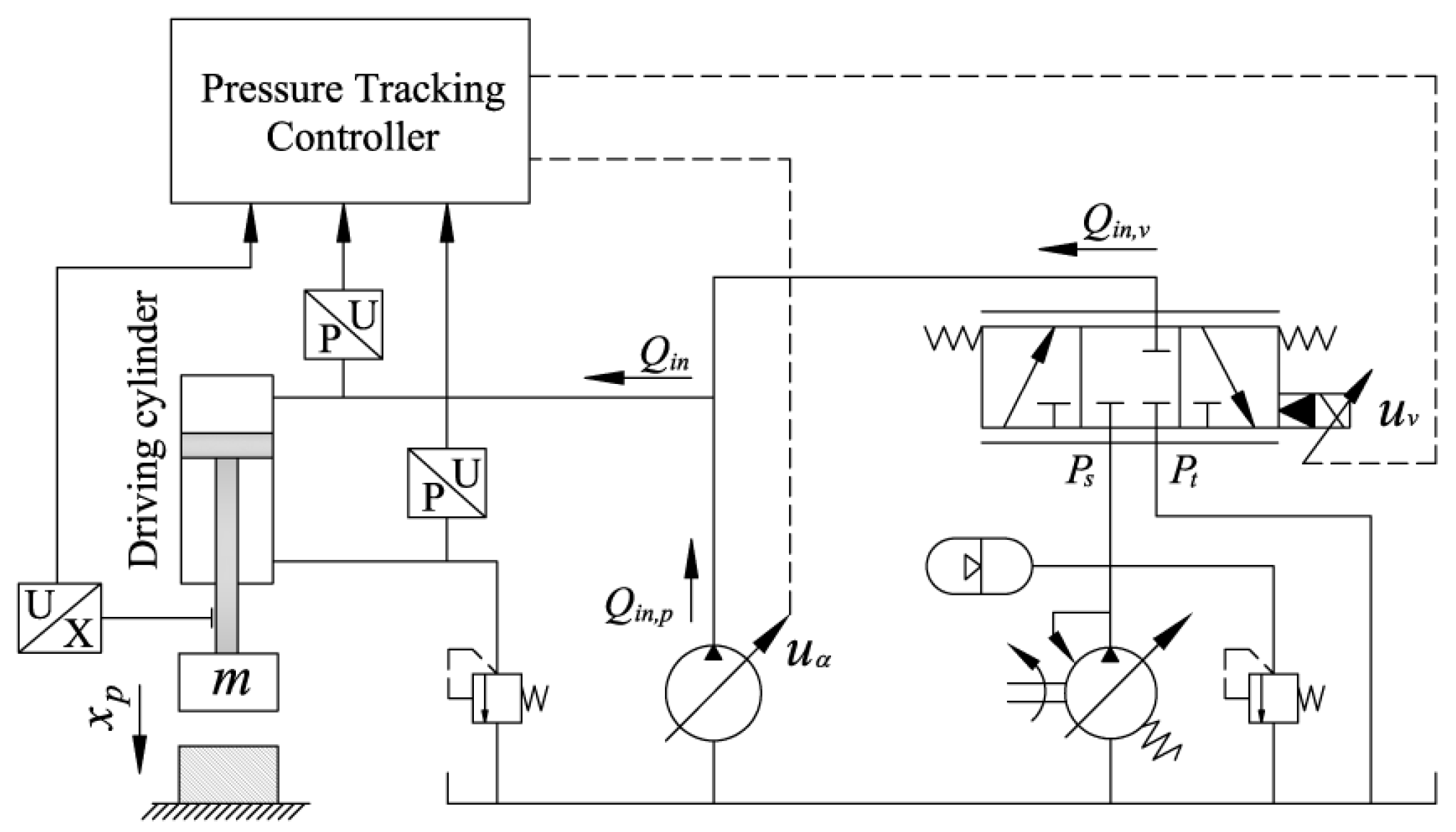
2. Mathematical Modeling
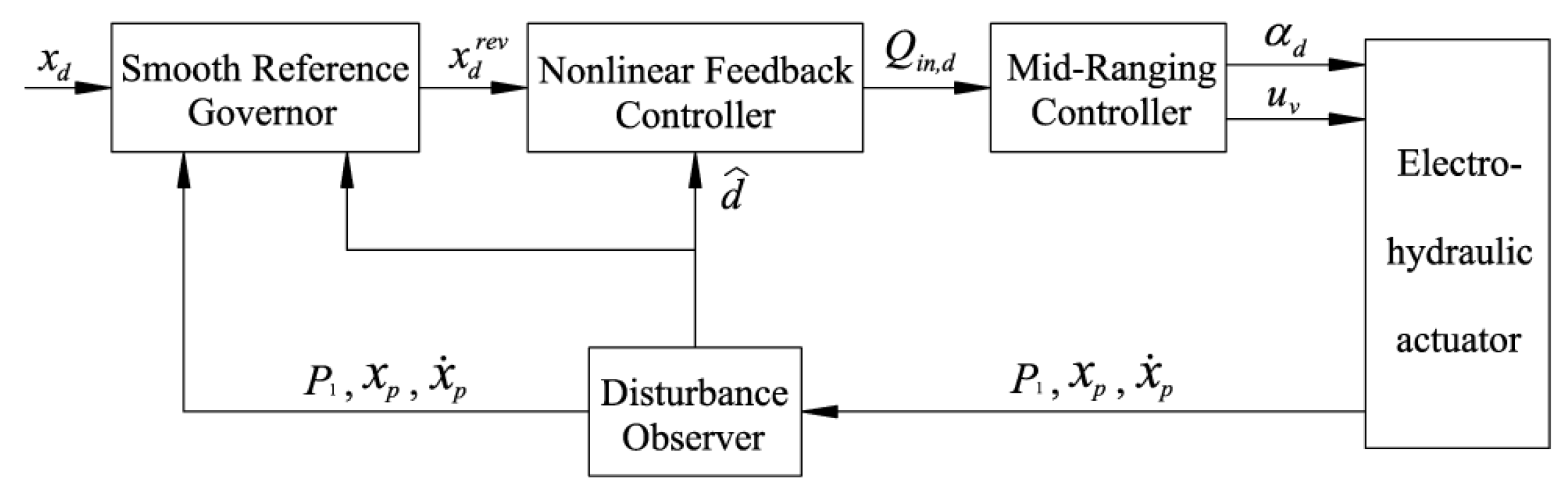
3. Controller Design
3.1. Disturbance Observer
3.2. Pressure Tracking Strategy
3.3. Nominal Reference Governor
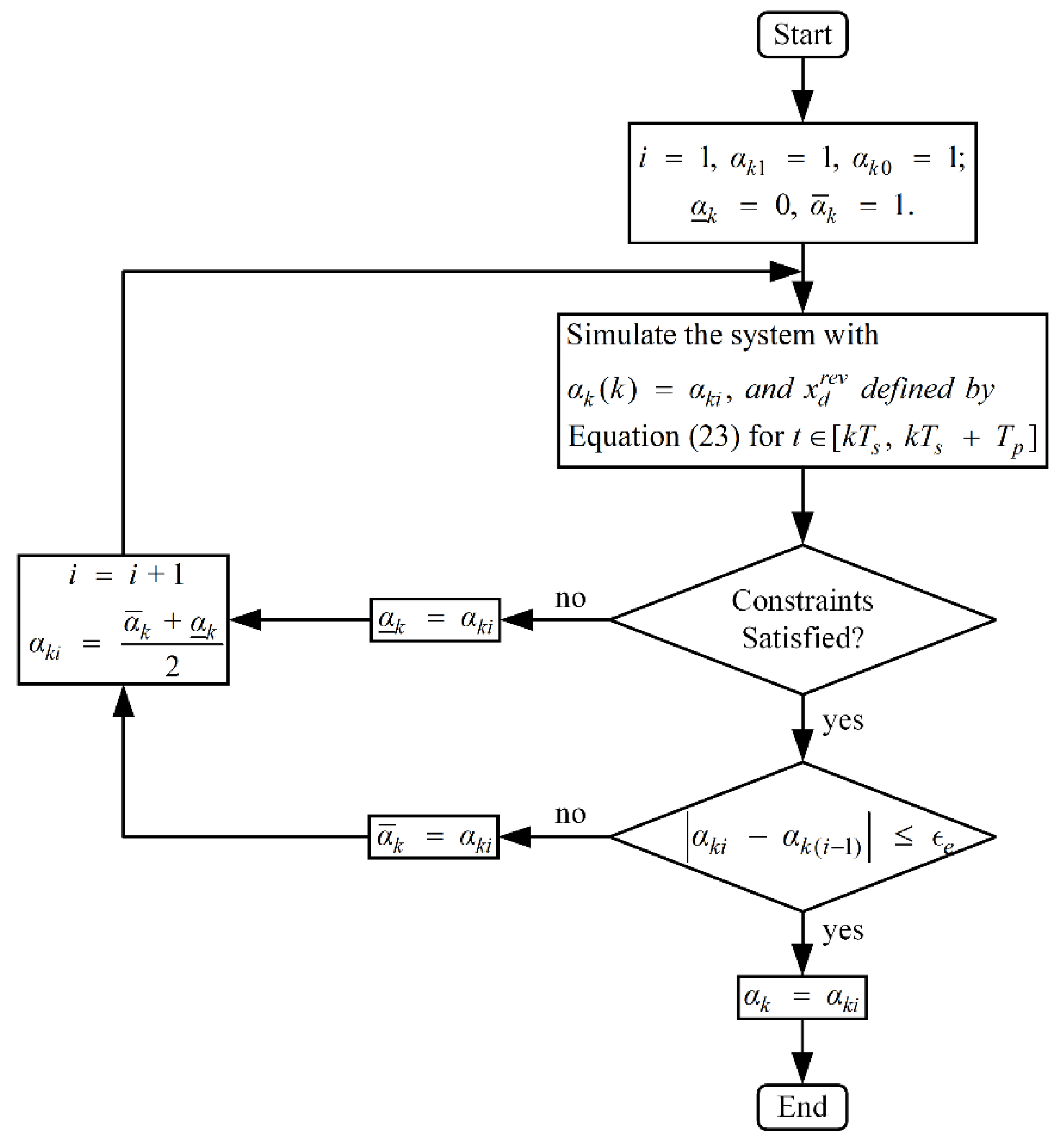
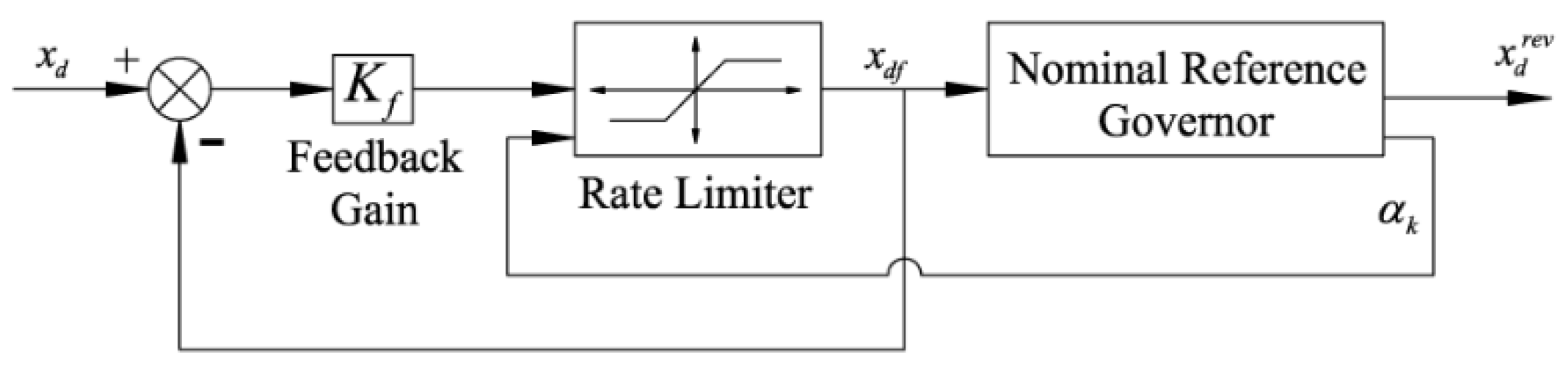
3.4. Novel Smooth Reference Governor
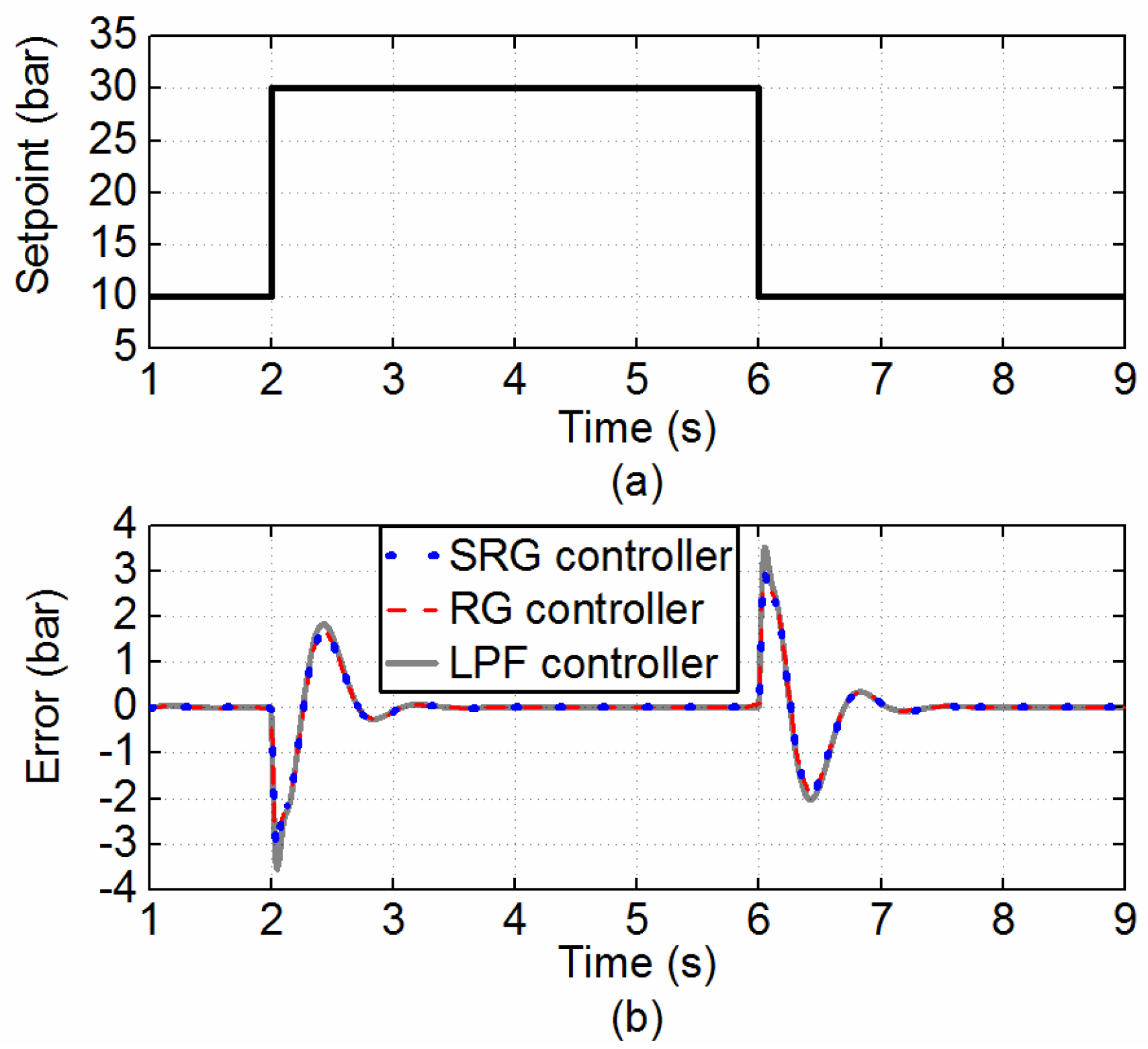
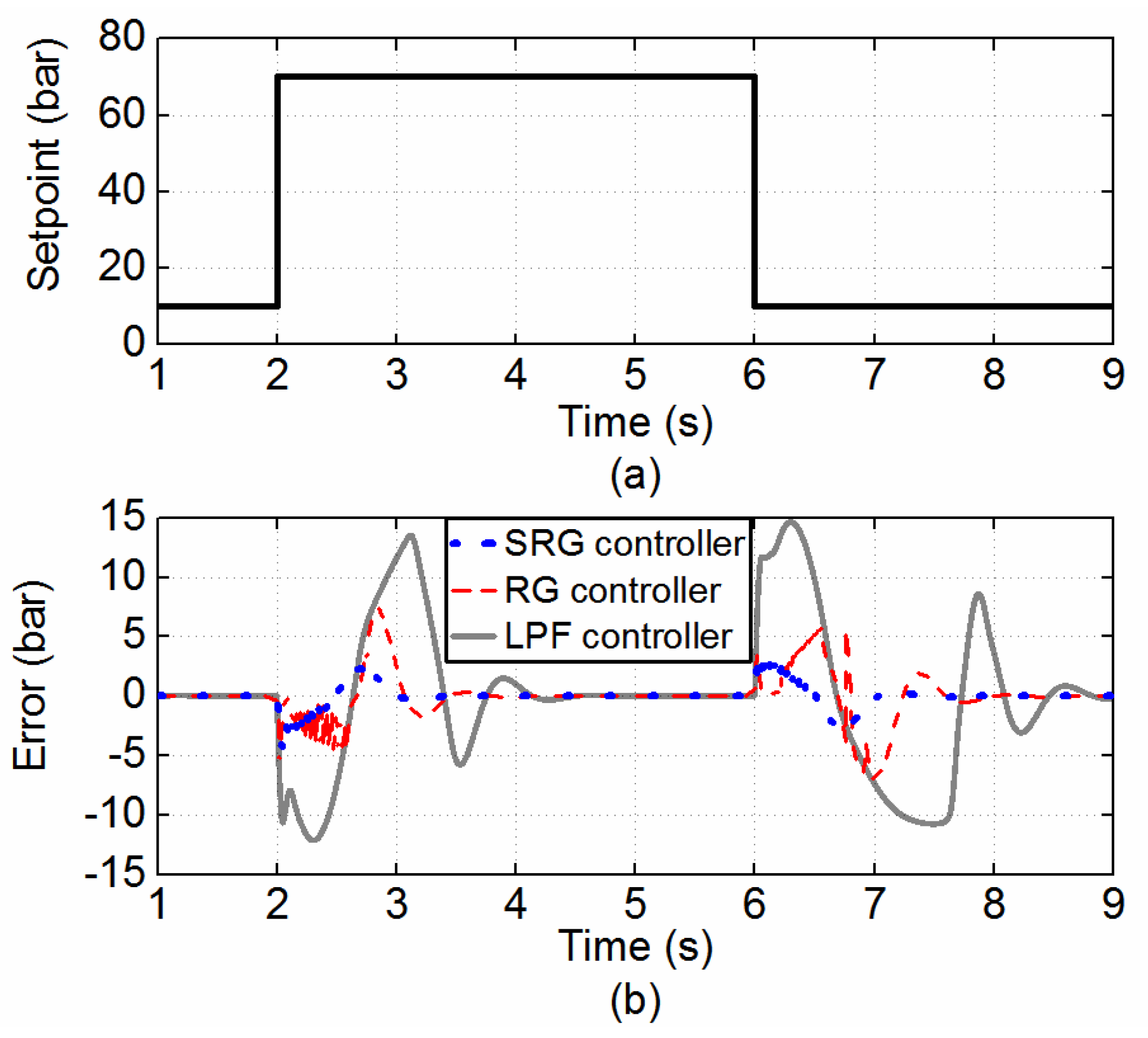
4. Case Studies
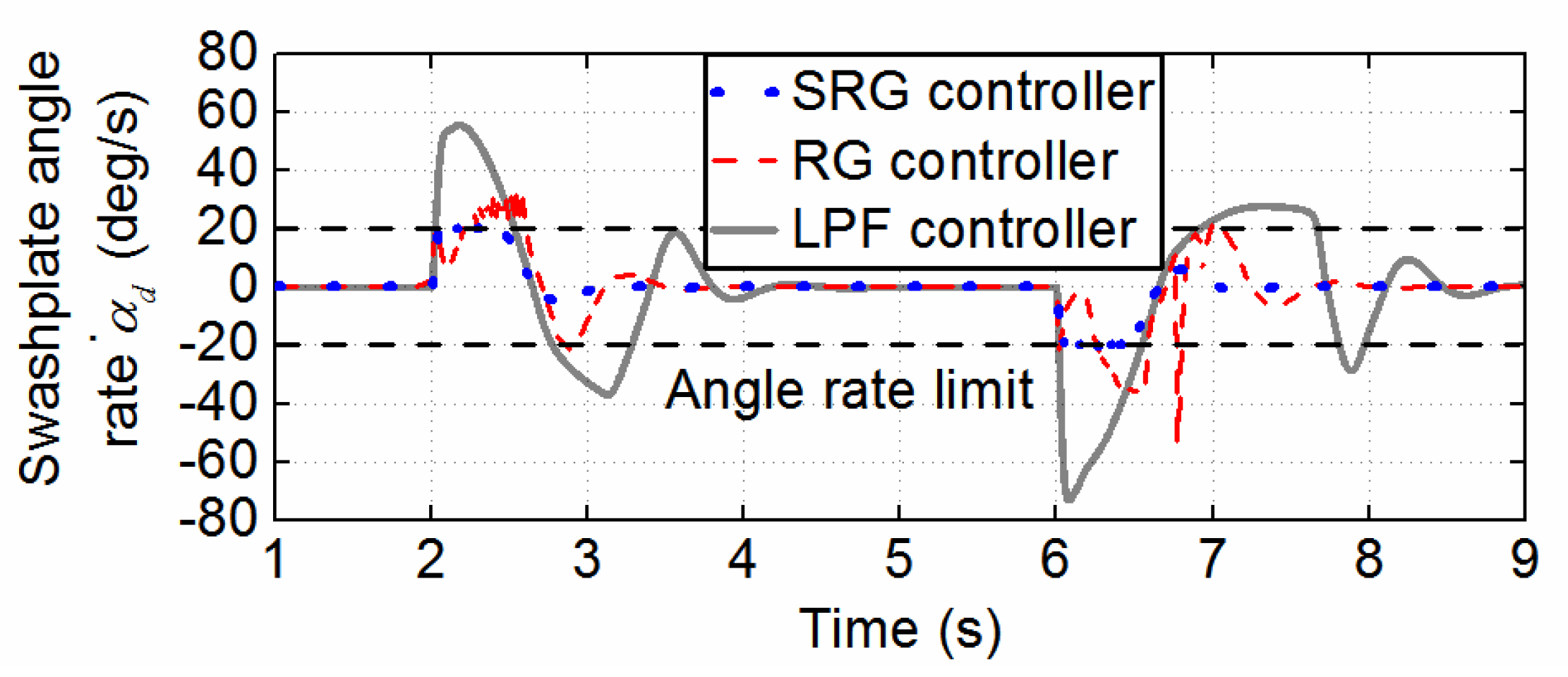
- (1)
- The proposed smooth reference governor-based controller (SRG);
- (2)
- The nominal reference governor-based controller (RG);
- (3)
- A third controller conducting pressure tracking without a reference governor. The impact of the reference governor was simulated by a first-order low-pass filter (LPF) with a 0.17 s time constant.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Feng, L.; Yan, H. Nonlinear Adaptive Robust Control of the Electro-Hydraulic Servo System. Appl. Sci. 2020, 10, 4494. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Dao, H.V.; Ahn, K.K. Adaptive Robust Position Control of Electro-Hydraulic Servo Systems with Large Uncertainties and Disturbances. Appl. Sci. 2022, 12, 794. [Google Scholar] [CrossRef]
- Lin, S.; An, G.; Huang, J.; Guo, Y. Robust Backstepping Control with Active Damping Strategy for Separating-Metering Electro-Hydraulic System. Appl. Sci. 2020, 10, 277. [Google Scholar] [CrossRef] [Green Version]
- Guo, K.; Wei, J.; Tian, Q. Nonlinear adaptive position tracking of an electro-hydraulic actuator. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 3252–3265. [Google Scholar] [CrossRef]
- Feng, H.; Qiao, W.; Yin, C.; Yu, H.; Cao, D. Identification and compensation of non-linear friction for a electro-hydraulic system. Mech. Mach. Theory 2019, 141, 1–13. [Google Scholar] [CrossRef]
- Guo, K.; Li, M.; Shi, W.; Pan, Y. Adaptive Tracking Control of Hydraulic Systems with Improved Parameter Convergence. IEEE Trans. Ind. Electron. 2022, 69, 7140–7150. [Google Scholar] [CrossRef]
- Ding, R.; Cheng, M.; Jiang, L.; Hu, G. Active Fault-Tolerant Control for Electro-Hydraulic Systems with an Independent Metering Valve Against Valve Faults. IEEE Trans. Ind. Electron. 2021, 68, 7221–7232. [Google Scholar] [CrossRef]
- Li, Z.; Wang, C.; Quan, L.; Hao, Y.; Ge, L.; Xia, L. Study on energy efficiency characteristics of the heavy-duty manipulator driven by electro-hydraulic hybrid active-passive system. Automat. Constr. 2021, 125, 103646. [Google Scholar] [CrossRef]
- Jing, C.; Xu, H.; Jiang, J. Practical torque tracking control of electro-hydraulic load simulator using singular perturbation theory. ISA Trans. 2020, 102, 304–313. [Google Scholar] [CrossRef]
- Du, H.; Shi, J.; Chen, J.; Zhang, Z.; Feng, X. High-gain observer-based integral sliding mode tracking control for heavy vehicle electro-hydraulic servo steering systems. Mechatronics 2021, 74, 102484. [Google Scholar] [CrossRef]
- Wang, C.; Jiao, Z.; Wu, S.; Shang, Y. Nonlinear adaptive torque control of electro-hydraulic load system with external active motion disturbance. Mechatronics 2014, 24, 32–40. [Google Scholar] [CrossRef]
- Lin, C.; Shen, F.; Wu, K.; Lee, H.; Hwang, S. Injection Molding Process Control of Servo–Hydraulic System. Appl. Sci. 2020, 10, 71. [Google Scholar] [CrossRef] [Green Version]
- Hua, Z.; Rong, X.; Li, Y.; Chai, H.; Li, B.; Zhang, S. Analysis and Verification on Energy Consumption of the Quadruped Robot with Passive Compliant Hydraulic Servo Actuator. Appl. Sci. 2020, 10, 340. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Zheng, F.; Gan, W.; Xing, S. Exploration and Research on Key Technologies for Improving the Response Speed of Servo-Hydraulic Cylinders. Appl. Sci. 2022, 12, 4162. [Google Scholar] [CrossRef]
- Sidhom, L.; Chihi, I.; Smaoui, M. Automation of a Hybrid Control for Electrohydraulic Servo-Actuators with Residual Dynamics. Appl. Sci. 2022, 12, 2856. [Google Scholar] [CrossRef]
- Wei, J.; Guo, K.; Fang, J.; Tian, Q. Nonlinear supply pressure control for a variable displacement axial piston pump. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2015, 229, 614–624. [Google Scholar] [CrossRef]
- Ge, L.; Dong, Z.; Huang, W.; Quan, L.; Yang, J.; Li, W. Research on the Performance of Hydraulic Excavator with Pump and Valve Combined Separate Meter in and Meter out Circuits. In Proceedings of the 2015 international conference on fluid power and mechatronics (FPM), Harbin, China, 5–7 August 2015. [Google Scholar]
- Tunay, I.; Rodin, E.Y.; Beck, A.A. Modeling and robust control design for aircraft brake hydraulics. IEEE Trans. Contr. Syst. Trans. 2001, 9, 319–329. [Google Scholar] [CrossRef]
- Hongliu, D. Pressure Control with Power Limitation for Hydraulic Variable Displacement Piston Pumps Hongliu Du. In Proceedings of the 2002 American Control, Anchorage, AK, USA, 8–10 May 2002; pp. 940–945. [Google Scholar]
- Parker, N.R.; Salcudean, S.E.; Lawrence, P.D. Application of Force Feedback to Heavy Duty Hydraulic Machines. In Proceedings of the [1993] Proceedings IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993. [Google Scholar]
- Zhu, C.; Zhang, H.; Wang, W.; Li, K.; Zhou, Z.; He, H. Compound Control on Constant Synchronous Output of Double Pump-Double Valve-Controlled Motor System. Processes 2022, 10, 528. [Google Scholar] [CrossRef]
- Yu, B.; Zhu, Q.; Yao, J.; Zhang, J.; Huang, Z.; Jin, Z.; Wang, X. Design, Mathematical Modeling and Force Control for Electro-Hydraulic Servo System with Pump-Valve Compound Drive. IEEE Access 2020, 8, 171988–172005. [Google Scholar] [CrossRef]
- An, G.; Peng, Z.; Fu, Y. The Application of Predictive Functional Control to New Motor Pump-Valve Compound Control System. In Proceedings of the 2009 9th International Conference on Electronic Measurement & Instruments, Beijing, China, 16–19 August 2009. [Google Scholar]
- Ding, H.; Zhao, J.; Cao, C.; Zhao, L. Valve–pump parallel variable mode control for hydraulic speed regulation of high-power systems. Adv. Mech. Eng. 2017, 9, 2071941856. [Google Scholar] [CrossRef]
- Ding, H.; Zhao, J. Performance analysis of variable speed hydraulic systems with large power in valve-pump parallel variable structure control. J. Vibroeng. 2014, 16, 1042–1062. [Google Scholar]
- Komsta, J.; van Oijen, N.; Antoszkiewicz, P. Integral sliding mode compensator for load pressure control of die-cushion cylinder drive. Control Eng. Pract. 2013, 21, 708–718. [Google Scholar] [CrossRef]
- Guo, K.; Wei, J.; Fang, J.; Feng, R.; Wang, X. Position tracking control of electro-hydraulic single-rod actuator based on an extended disturbance observer. Mechatronics 2015, 27, 47–56. [Google Scholar] [CrossRef]
- Tian, Q.; Wei, J.; Fang, J.; Guo, K. Adaptive fuzzy integral sliding mode velocity control for the cutting system of a trench cutter. Front. Inf. Technol. Electron. Eng. 2016, 17, 55–66. [Google Scholar] [CrossRef]
- Komsta, J.; Adamy, J.; Antoszkiewicz, P. Input-Output Linearization and Integral Sliding Mode Disturbance Compensation for Electro-hydraulic Drives. In Proceedings of the 2010 11th International Workshop on Variable Structure Systems (VSS), Mexico City, Mexico, 26–28 June 2010. [Google Scholar]
- Liu, S.; Yao, B. Automated onboard modeling of cartridge valve flow mapping. IEEE/ASME Trans. Mechatron. 2006, 11, 381–388. [Google Scholar]
- Kemmetmüller, W.; Fuchshumer, F.; Kugi, A. Nonlinear pressure control of self-supplied variable displacement axial piston pumps. Control Eng. Pract. 2010, 18, 84–93. [Google Scholar] [CrossRef]
- Yun, J.N.; Su, J. Design of a Disturbance Observer for a Two-Link Manipulator with Flexible Joints. IEEE Trans. Contr. Syst. Trans. 2014, 22, 809–815. [Google Scholar] [CrossRef]
- Merritt, H.E. Hydraulic Control Systems; Wiley: Hoboken, NJ, USA, 1967. [Google Scholar]
- Guo, K.; Wei, J. Adaptive Robust Control of Variable Displacement Pumps. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013. [Google Scholar]
- Sun, J.; Kolmanovsky, I.V. Load governor for fuel cell oxygen starvation protection: A robust nonlinear reference governor approach. IEEE Trans. Contr. Syst. Trans. 2005, 13, 911–920. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description | Value |
|---|---|---|
| m | Load mass | 1200 kg |
| A1 | Driving cylinder piston side chamber area | 3.8 × 10−2 m2 |
| Ps | Pump supply pressure | 2.0 × 107 Pa |
| Ct | Driving cylinder leakage coefficient | 0 m3/(s∙Pa) |
| βe | Oil bulk modulus | 1 × 109 Pa |
| kq∙kx | Servo valve flow gain coefficient | |
| kp | Pump flow coefficient | 6.56 × 10−3 m3/(s∙rad) |
| ωα | Pump dynamics natural frequency | 25 rad/s |
| ξα | Pump dynamics damping ratio | 1 |
| ωv | Valve dynamics natural frequency | 200 rad/s |
| ξv | Valve dynamics damping ratio | 1 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| k1 | 200 | k2 | 5.43 × 10−8 |
| c1 | 10 | Tda | 0.15 |
| ξda | 1 | Ts | 0.001 |
| Tp | 0.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, G.; Chen, S.; Liu, Y.; Guo, K. A Novel Reference Governor for Disturbance Observer-Based Load Pressure Control in a Dual-Actuator-Driven Electrohydraulic Actuator. Appl. Sci. 2022, 12, 8367. https://doi.org/10.3390/app12168367
Zhao G, Chen S, Liu Y, Guo K. A Novel Reference Governor for Disturbance Observer-Based Load Pressure Control in a Dual-Actuator-Driven Electrohydraulic Actuator. Applied Sciences. 2022; 12(16):8367. https://doi.org/10.3390/app12168367
Chicago/Turabian StyleZhao, Guisheng, Shaonan Chen, Yixiang Liu, and Kai Guo. 2022. "A Novel Reference Governor for Disturbance Observer-Based Load Pressure Control in a Dual-Actuator-Driven Electrohydraulic Actuator" Applied Sciences 12, no. 16: 8367. https://doi.org/10.3390/app12168367
APA StyleZhao, G., Chen, S., Liu, Y., & Guo, K. (2022). A Novel Reference Governor for Disturbance Observer-Based Load Pressure Control in a Dual-Actuator-Driven Electrohydraulic Actuator. Applied Sciences, 12(16), 8367. https://doi.org/10.3390/app12168367