
A Low-Cost Global Navigation Satellite System Positioning Accuracy Assessment Method for Agricultural Machinery





Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
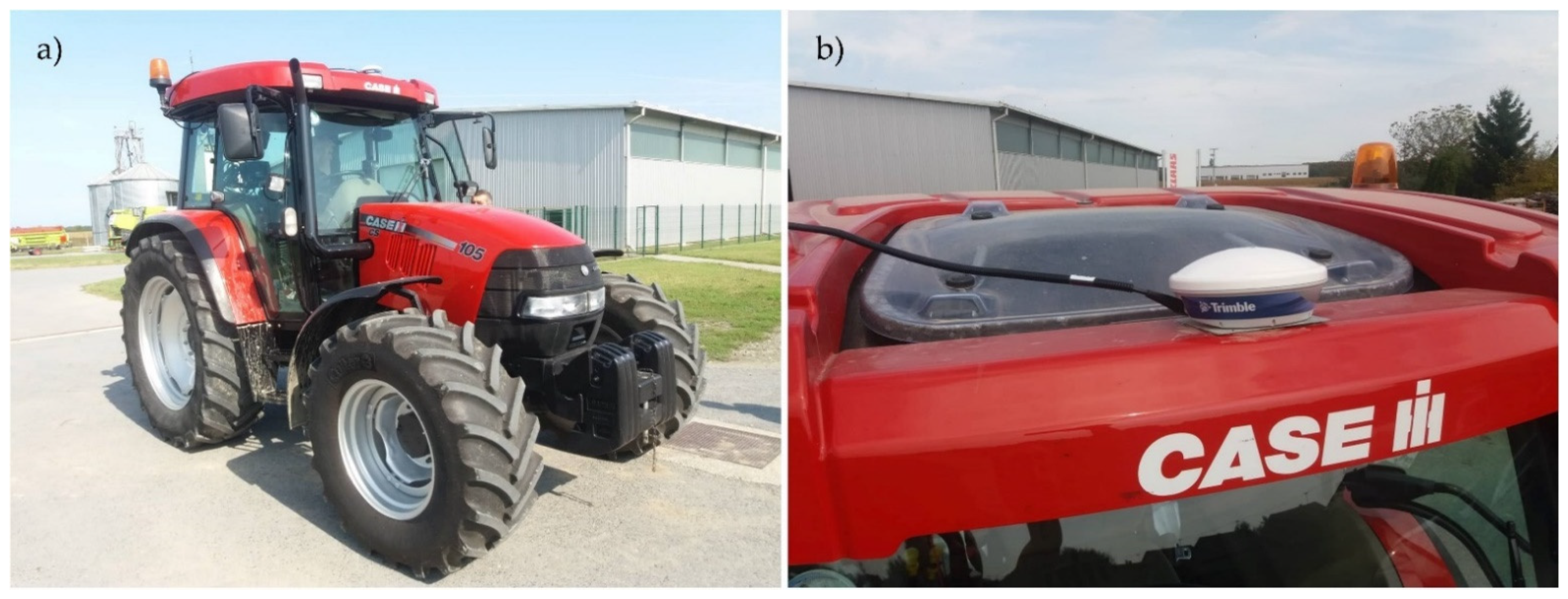
2.2. GNSS RTK Corrections and Field Data Acquisition
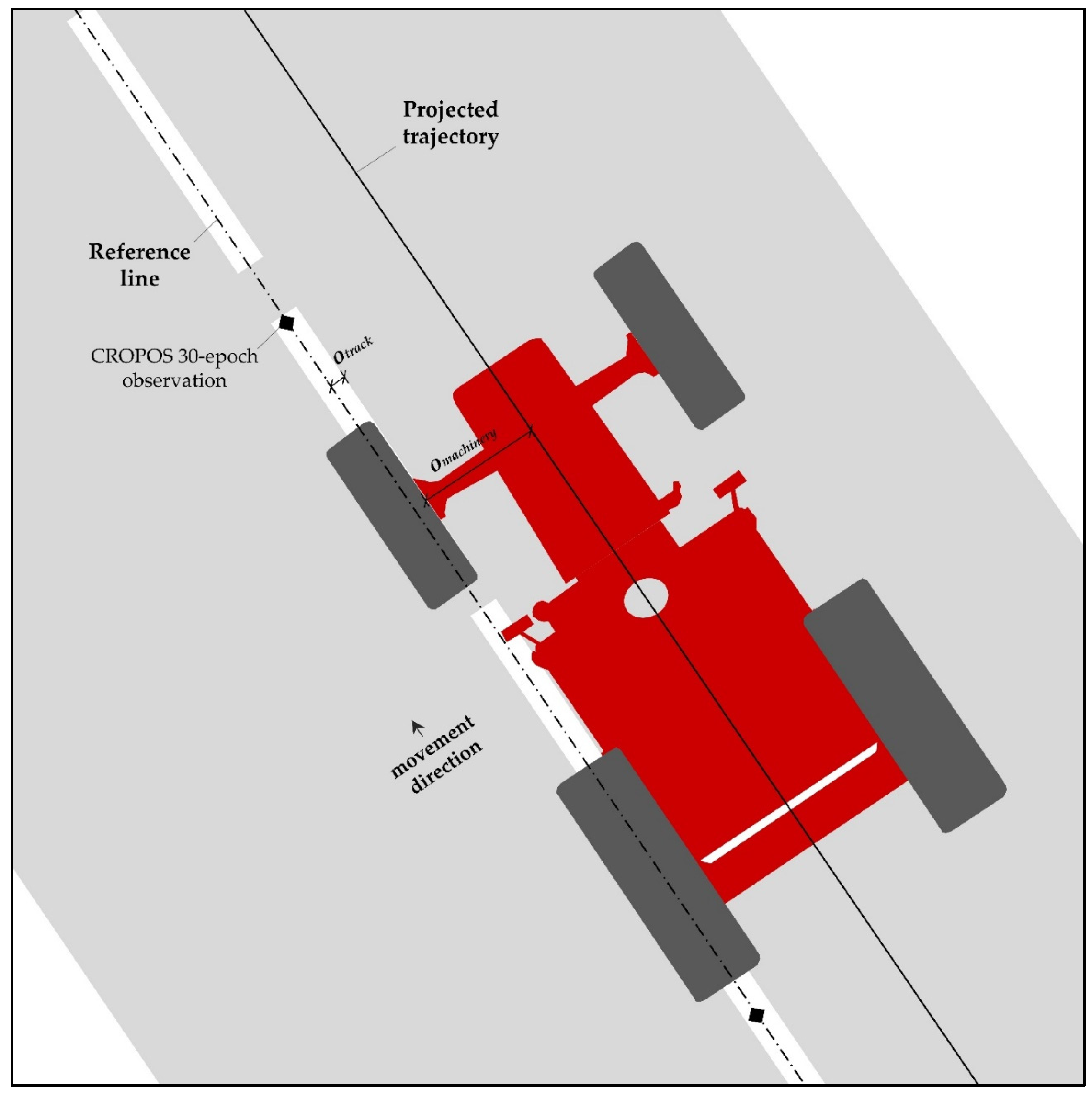
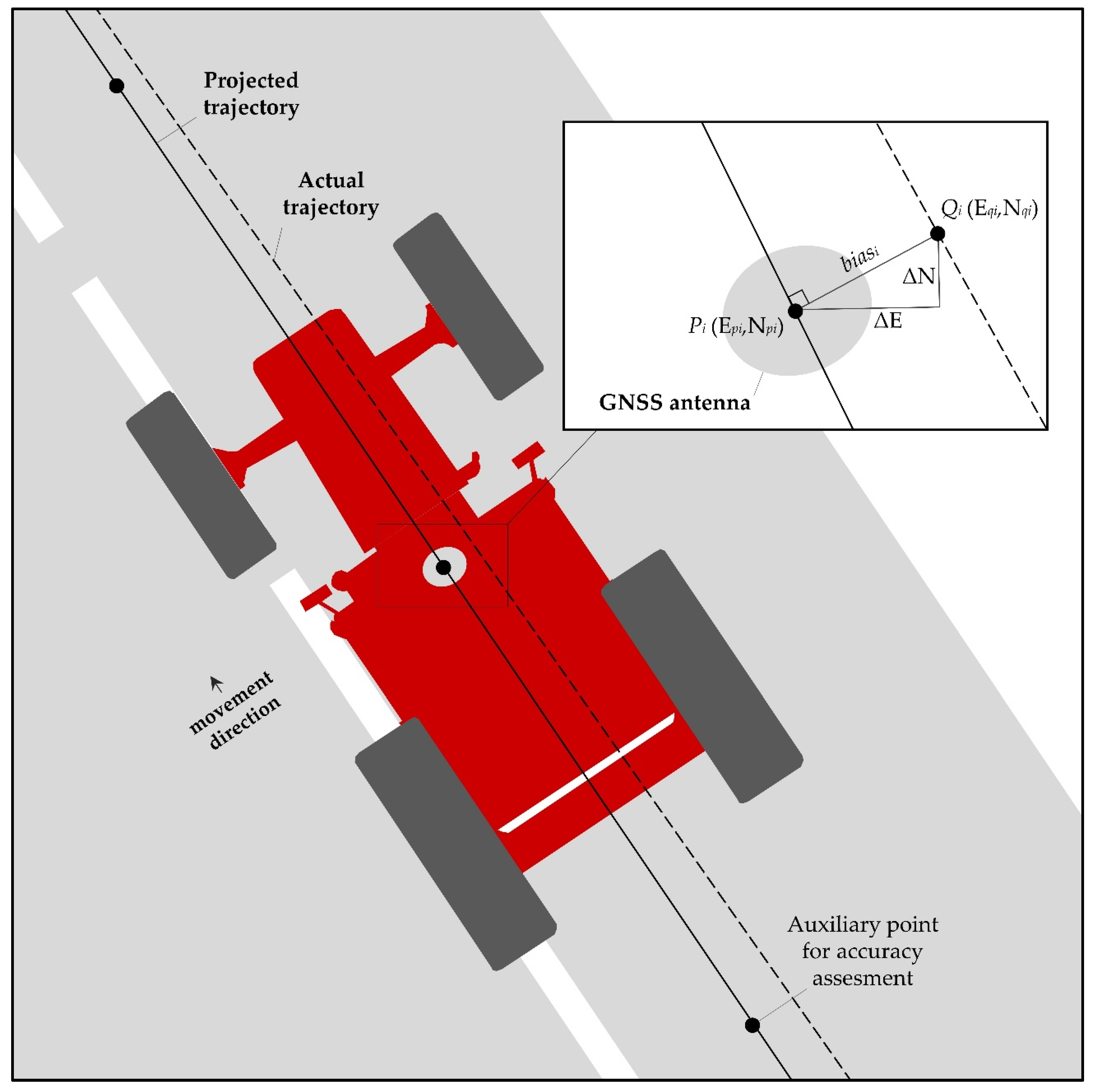
2.3. Determination of the Projected Trajectory and Bias for the Actual Trajectory
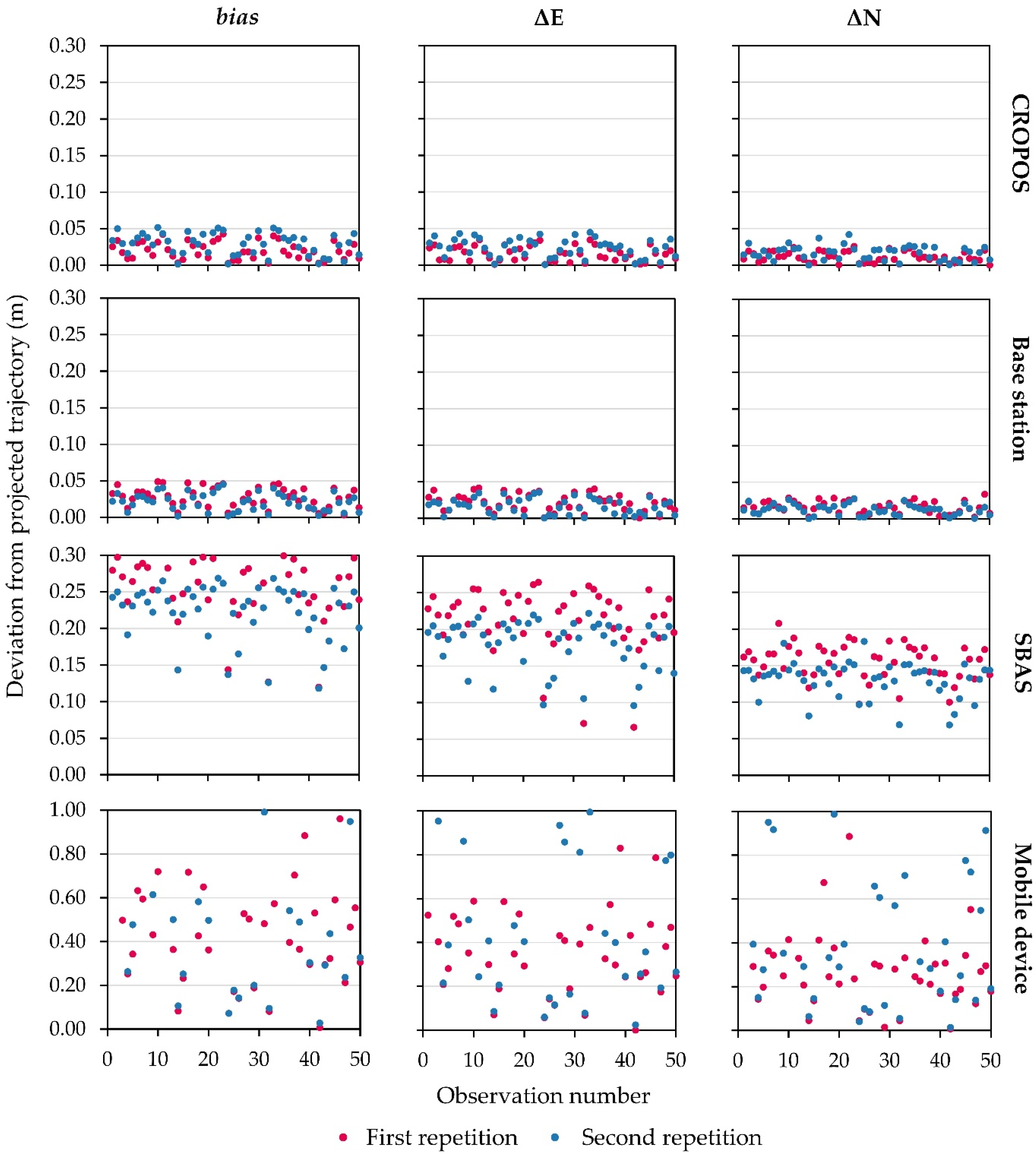
3. Results
4. Discussion
- The retained minor subjective impact of the operator on the GNSS positioning accuracy;
- The lack of newly available GNSS corrections and multiple study areas.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tayebi, A.; Gomez, J.; Fernandez, M.; Saez de Adana, F.; Gutierrez, O. Low-Cost Experimental Application of Real-Time Kinematic Positioning for Increasing the Benefits in Cereal Crops. Int. J. Agric. Biol. Eng. 2021, 14, 194–199. [Google Scholar] [CrossRef]
- Ayerdi Gotor, A.; Marraccini, E.; Leclercq, C.; Scheurer, O. Precision Farming Uses Typology in Arable Crop-Oriented Farms in Northern France. Precis. Agric. 2020, 21, 131–146. [Google Scholar] [CrossRef]
- Toriyama, K. Development of Precision Agriculture and ICT Application Thereof to Manage Spatial Variability of Crop Growth. Soil Sci. Plant Nutr. 2020, 66, 811–819. [Google Scholar] [CrossRef]
- Guo, J.; Li, X.; Li, Z.; Hu, L.; Yang, G.; Zhao, C.; Fairbairn, D.; Watson, D.; Ge, M. Multi-GNSS Precise Point Positioning for Precision Agriculture. Precis. Agric. 2018, 19, 895–911. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Li, J.; Wang, L.; Shi, Y. Positioning Accuracy Assessment of a Commercial RTK UAS. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping V; Thomasson, J.A., TorresRua, A.F., Eds.; SPIE-International Society Optical Engineering: Bellingham, UK, 2020; Volume 11414, p. 1141409. [Google Scholar]
- Carballido, J.; Perez-Ruiz, M.; Emmi, L.; Agüera, J. Comparison of Positional Accuracy between RTK and RTX GNSS Based on the Autonomous Agricultural Vehicles under Field Conditions. Appl. Eng. Agric. 2014, 30, 361–366. [Google Scholar] [CrossRef] [Green Version]
- Republic of Croatia, State Geodetic Administration CROPOS Users’ Manual. Available online: https://www.cropos.hr/files/docs/cropos_users-manual.pdf (accessed on 22 November 2021).
- D’Antonio, P.; D’Antonio, C.; Evangelista, C.; Doddato, V. Satellite Guidance Systems in Agriculture: Experimental Comparison between EZ-Steer/RTK and AUTOPILOT/EGNOS. J. Agric. Eng. 2013, 44, 173–177. [Google Scholar] [CrossRef]
- Scarfone, A.; Picchio, R.; del Giudice, A.; Latterini, F.; Mattei, P.; Santangelo, E.; Assirelli, A. Semi-Automatic Guidance vs. Manual Guidance in Agriculture: A Comparison of Work Performance in Wheat Sowing. Electronics 2021, 10, 825. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, G.; Huang, J.; Zhang, Y. A Study on the Time Lag and Compensation of a Variable-Rate Fertilizer Applicator. Appl. Eng. Agric. 2021, 37, 43–52. [Google Scholar] [CrossRef]
- Perez-Ruiz, M.; Carballido, J.; Agueera, J.; Gil, J.A. Assessing GNSS Correction Signals for Assisted Guidance Systems in Agricultural Vehicles. Precis. Agric. 2011, 12, 639–652. [Google Scholar] [CrossRef]
- Catania, P.; Comparetti, A.; Febo, P.; Morello, G.; Orlando, S.; Roma, E.; Vallone, M. Positioning Accuracy Comparison of GNSS Receivers Used for Mapping and Guidance of Agricultural Machines. Agronomy 2020, 10, 924. [Google Scholar] [CrossRef]
- Alkan, R.M.; Erol, S.; İlçi, V.; Ozulu, İ.M. Comparative Analysis of Real-Time Kinematic and PPP Techniques in Dynamic Environment. Measurement 2020, 163, 107995. [Google Scholar] [CrossRef]
- Gomez-Gil, J.; Alonso-Garcia, S.; Gómez-Gil, F.J.; Stombaugh, T. A Simple Method to Improve Autonomous GPS Positioning for Tractors. Sensors 2011, 11, 5630–5644. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Valente, D.S.M.; Momin, A.; Grift, T.; Hansen, A. Accuracy and Precision Evaluation of Two Low-Cost RTK Global Navigation Satellite Systems. Comput. Electron. Agric. 2020, 168, 105142. [Google Scholar] [CrossRef]
- Kaivosoja, J.; Linkolehto, R. GNSS Error Simulator for Farm Machinery Navigation Development. Comput. Electron. Agric. 2015, 119, 166–177. [Google Scholar] [CrossRef]
- Garrido-Carretero, M.S.; de Lacy-Perez de los Cobos, M.C.; Borque-Arancon, M.J.; Ruiz-Armenteros, A.M.; Moreno-Guerrero, R.; Gil-Cruz, A.J. Low-Cost GNSS Receiver in RTK Positioning under the Standard ISO-17123-8: A Feasible Option in Geomatics. Measurement 2019, 137, 168–178. [Google Scholar] [CrossRef]
- Preseren, P.P.; Mencin, A.; Stopar, B. Analysis of Gnss-Rtk Instruments Testing on the Iso 17123-8 Instructions. Geod. Vestn. 2010, 54, 607–626. [Google Scholar] [CrossRef]
- Paziewski, J.; Wielgosz, P. Investigation of Some Selected Strategies for Multi-GNSS Instantaneous RTK Positioning. Adv. Space Res. 2017, 59, 12–23. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, C.; Wang, Y.; Wu, S. Application of Low Cost Integrated Navigation System in Precision Agriculture. Intell. Autom. Soft Comput. 2020, 26, 1419–1428. [Google Scholar] [CrossRef]
- Passalaqua, B.P.; Molin, J.P. Path Errors in Sugarcane Transshipment Trailers. Eng. Agric. 2020, 40, 223–231. [Google Scholar] [CrossRef]
- Shi, Y.; Xi, X.; Gan, H.; Shan, X.; Zhang, Y.; Shen, H.; Zhang, R. Design and Experiment of Row-Controlled Fertilizing–Weeding Machine for Rice Cultivation. Agriculture 2021, 11, 527. [Google Scholar] [CrossRef]
- de Silva, T.M.A.; de Mayrink, G.O.; Valente, D.S.M.; Queiroz, D.M. Integration of a Low-Cost Global Navigation Satellite System to a Single-Board Computer Using Kalman Filtering. Eng. Agric. 2019, 39, 323–330. [Google Scholar] [CrossRef]
- Akkamis, M.; Keskin, M.; Sekerli, Y.E. Comparative Appraisal of Three Low-Cost GPS Speed Sensors with Different Data Update Frequencies. AgriEngineering 2021, 3, 423–437. [Google Scholar] [CrossRef]
- Armenteros, J.A.; Gil, A.J. A Methodology for Creating Rtk Positioning Coverage Maps Via a Radio Modem Link to Cors Stations. Surv. Rev. 2010, 42, 406–411. [Google Scholar] [CrossRef]
- He, K.; Xu, T.; Forste, C.; Petrovic, S.; Barthelmes, F.; Jiang, N.; Flechtner, F. GNSS Precise Kinematic Positioning for Multiple Kinematic Stations Based on A Priori Distance Constraints. Sensors 2016, 16, 470. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, L.; Jia, C.; Zhao, L.; Cheng, J.; Liu, J.; Ding, J. Real-Time Single Frequency Precise Point Positioning Using SBAS Corrections. Sensors 2016, 16, 1261. [Google Scholar] [CrossRef] [Green Version]
- Nie, Z.; Zhou, P.; Liu, F.; Wang, Z.; Gao, Y. Evaluation of Orbit, Clock and Ionospheric Corrections from Five Currently Available SBAS L1 Services: Methodology and Analysis. Remote Sens. 2019, 11, 411. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Gao, C.; Peng, Z.; Zhang, R.; Shang, R. Smartphone Positioning and Accuracy Analysis Based on Real-Time Regional Ionospheric Correction Model. Sensors 2021, 21, 3879. [Google Scholar] [CrossRef]
- Meneghini, C.; Parente, C. Advantages of Multi GNSS Constellation: GDOP Analysis for GPS, GLONASS and Galileo Combinations. Int. J. Eng. Technol. Innov. 2017, 7, 1–10. [Google Scholar]
- Pereira, F.; Selva, D. Exploring the Architecture Trade Space of NextGen Global Navigation Satellite Systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Ding, W.; Sun, W.; Gao, Y.; Wu, J. Carrier Phase-Based Precise Heading and Pitch Estimation Using a Low-Cost GNSS Receiver. Remote Sens. 2021, 13, 3642. [Google Scholar] [CrossRef]
- Scott, D.N.; Brogan, D.J.; Lininger, K.B.; Schook, D.M.; Daugherty, E.E.; Sparacino, M.S.; Patton, A.I. Evaluating Survey Instruments and Methods in a Steep Channel. Geomorphology 2016, 273, 236–243. [Google Scholar] [CrossRef] [Green Version]
- Pepe, M.; Costantino, D.; Vozza, G.; Alfio, V.S. Comparison of Two Approaches to GNSS Positioning Using Code Pseudoranges Generated by Smartphone Device. Appl. Sci. 2021, 11, 4787. [Google Scholar] [CrossRef]
- Kazmierski, K.; Hadas, T.; Sośnica, K. Weighting of Multi-GNSS Observations in Real-Time Precise Point Positioning. Remote Sens. 2018, 10, 84. [Google Scholar] [CrossRef] [Green Version]
- Park, K.W.; Park, J.-I.; Park, C. Efficient Methods of Utilizing Multi-SBAS Corrections in Multi-GNSS Positioning. Sensors 2020, 20, 256. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mahato, S.; Rakshit, P.; Santra, A.; Dan, S.; Tiglao, N.C.; Bose, A. A GNSS-Enabled Multi-Sensor for Agricultural Applications. J. Inform. Optim. Sci. 2019, 40, 1763–1772. [Google Scholar] [CrossRef]
- Marucci, A.; Colantoni, A.; Zambon, I.; Egidi, G. Precision Farming in Hilly Areas: The Use of Network RTK in GNSS Technology. Agriculture 2017, 7, 60. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.; Zhang, W.; You, X.; Du, N. Which Accuracy Levels of Positioning Technologies Do Drivers Really Need in Connected Vehicle Settings for Safety? Accid. Anal. Prev. 2021, 157, 106106. [Google Scholar] [CrossRef]
- Dvulit, P.D.; Savchuk, S.; Sosonka, I. The Processing of GNSS Observation by Non-Classical Error Theory of Measurements. Geodynamics 2020, 28, 19–28. [Google Scholar] [CrossRef]
- de Bakker, P.F.; Tiberius, C.C.J.M. Real-Time Multi-GNSS Single-Frequency Precise Point Positioning. GPS Solut. 2017, 21, 1791–1803. [Google Scholar] [CrossRef] [Green Version]
- Atiz, O.F.; Shakor, A.Q.; Ogutcu, S.; Alcay, S. Performance Investigation of Trimble RTX Correction Service with Multi-GNSS Constellation. Surv. Rev. 2021, 1–11. [Google Scholar] [CrossRef]
- Dabrowski, P.S.; Specht, C.; Felski, A.; Koc, W.; Wilk, A.; Czaplewski, K.; Karwowski, K.; Jaskolski, K.; Specht, M.; Chrostowski, P.; et al. The Accuracy of a Marine Satellite Compass under Terrestrial Urban Conditions. J. Mar. Sci. Eng. 2020, 8, 18. [Google Scholar] [CrossRef] [Green Version]
- Mayer, P.; Magno, M.; Berger, A.; Benini, L. RTK-LoRa: High-Precision, Long-Range, and Energy-Efficient Localization for Mobile IoT Devices. IEEE Trans. Instrum. Meas. 2021, 70, 3000611. [Google Scholar] [CrossRef]
- Deng, J.; Wang, S.L. Divisional Ambiguity Resolution for Long Range Reference Stations in Network RTK. Surv. Rev. 2015, 47, 272–278. [Google Scholar] [CrossRef]
- Berber, M.; Arslan, N. Network RTK: A Case Study in Florida. Measurement 2013, 46, 2798–2806. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Repetition | GNSS Corrections | Starting Time (UTC + 01:00) | Number of Satellites | GDOP | TEC | ||
|---|---|---|---|---|---|---|---|
| GPS | GLONASS | Total | |||||
| 1st | CROPOS | 10:00 | 8 | 5 | 13 | 2.14 | 10.19 |
| Base station | 10:15 | 8 | 6 | 14 | 1.83 | 10.54 | |
| SBAS | 10:30 | 10 | 6 | 16 | 1.71 | 10.65 | |
| Mobile device | 10:45 | 9 | 6 | 15 | 1.61 | 10.75 | |
| 2nd | CROPOS | 13:00 | 12 | 4 | 16 | 2.30 | 10.81 |
| Base station | 13:15 | 11 | 5 | 16 | 1.84 | 10.97 | |
| SBAS | 13:30 | 11 | 5 | 16 | 1.81 | 10.99 | |
| Mobile device | 13:45 | 11 | 5 | 16 | 1.68 | 11.04 | |
| GNSS Corrections | First Repetition | Second Repetition | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| n | Median (m) | CV | Min (m) | Max (m) | n | Median (m) | CV | Min (m) | Max (m) | ||
| bias | CROPOS | 50 | 0.019 | 0.604 | 0.003 | 0.043 | 50 | 0.029 | 0.511 | 0.002 | 0.052 |
| Base station | 50 | 0.027 | 0.496 | 0.003 | 0.049 | 50 | 0.032 | 0.572 | 0.002 | 0.045 | |
| SBAS | 50 | 0.263 | 0.174 | 0.120 | 0.323 | 50 | 0.223 | 0.172 | 0.118 | 0.269 | |
| Mobile device | 50 | 0.842 | 0.979 | 0.007 | 3.611 | 50 | 1.340 | 0.762 | 0.028 | 3.739 | |
| ΔE | CROPOS | 50 | 0.015 | 0.671 | 0.000 | 0.035 | 50 | 0.023 | 0.538 | 0.001 | 0.045 |
| Base station | 50 | 0.022 | 0.542 | 0.001 | 0.041 | 50 | 0.016 | 0.647 | 0.000 | 0.036 | |
| SBAS | 50 | 0.212 | 0.199 | 0.066 | 0.264 | 50 | 0.179 | 0.190 | 0.096 | 0.222 | |
| Mobile device | 50 | 0.581 | 0.803 | 0.003 | 1.788 | 50 | 1.006 | 0.759 | 0.024 | 3.358 | |
| ΔN | CROPOS | 50 | 0.011 | 0.642 | 0.000 | 0.026 | 50 | 0.016 | 0.594 | 0.000 | 0.042 |
| Base station | 50 | 0.016 | 0.513 | 0.002 | 0.033 | 50 | 0.012 | 0.577 | 0.000 | 0.028 | |
| SBAS | 50 | 0.155 | 0.154 | 0.097 | 0.207 | 50 | 0.131 | 0.187 | 0.069 | 0.183 | |
| Mobile device | 50 | 0.548 | 1.334 | 0.007 | 3.536 | 50 | 0.815 | 0.933 | 0.014 | 3.170 | |
| GNSS Corrections | 1st Repetition | 2nd Repetition | Normality Observed | |||
|---|---|---|---|---|---|---|
| W | p | W | p | |||
| bias | CROPOS | 0.9411 | 0.0149 | 0.9462 | 0.0239 | no |
| Base station | 0.9531 | 0.0456 | 0.9633 | 0.1218 | no | |
| SBAS | 0.8815 | 0.0001 | 0.8610 | >0.0001 | no | |
| Mobile device | 0.7884 | >0.0001 | 0.9287 | >0.0001 | no | |
| ΔE | CROPOS | 0.9413 | 0.0151 | 0.9630 | 0.1186 | no |
| Base station | 0.9621 | 0.1085 | 0.9428 | 0.0174 | no | |
| SBAS | 0.8310 | >0.0001 | 0.8646 | >0.0001 | no | |
| Mobile device | 0.8640 | >0.0001 | 0.9296 | >0.0001 | no | |
| ΔN | CROPOS | 0.9442 | 0.0198 | 0.9703 | 0.2376 | no |
| Base station | 0.9622 | 0.0497 | 0.9756 | 0.3852 | no | |
| SBAS | 0.9688 | 0.2058 | 0.9158 | 0.0017 | no | |
| Mobile device | 0.6329 | >0.0001 | 0.8658 | >0.0001 | no | |
| GNSS Corrections | W | p | Significantly Different Medians | |
|---|---|---|---|---|
| bias | CROPOS | 784 | 0.0013 | yes |
| Base station | 1587 | 0.0204 | yes | |
| SBAS | 1962 | >0.0001 | yes | |
| Mobile device | 3712 | 0.0017 | yes | |
| ΔE | CROPOS | 790 | 0.0015 | yes |
| Base station | 1578 | 0.0240 | yes | |
| SBAS | 1940 | >0.0001 | yes | |
| Mobile device | 3559 | 0.0004 | yes | |
| ΔN | CROPOS | 850 | 0.0059 | yes |
| Base station | 1570 | 0.0276 | yes | |
| SBAS | 1894 | >0.0001 | yes | |
| Mobile device | 3814 | 0.0038 | yes |
| C1 | C2 | B1 | B2 | S1 | S2 | M1 | M2 | |
|---|---|---|---|---|---|---|---|---|
| C1 | 1.000 | |||||||
| C2 | 0.921 | 1.000 | ||||||
| B1 | 0.923 | 0.965 | 1.000 | |||||
| B2 | 0.952 | 0.952 | 0.958 | 1.000 | ||||
| S1 | 0.851 | 0.908 | 0.884 | 0.881 | 1.000 | |||
| S2 | 0.833 | 0.915 | 0.905 | 0.867 | 0.958 | 1.000 | ||
| M1 | 0.660 | 0.623 | 0.626 | 0.617 | 0.571 | 0.551 | 1.000 | |
| M2 | 0.815 | 0.785 | 0.798 | 0.783 | 0.722 | 0.709 | 0.938 | 1.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Radočaj, D.; Plaščak, I.; Heffer, G.; Jurišić, M. A Low-Cost Global Navigation Satellite System Positioning Accuracy Assessment Method for Agricultural Machinery. Appl. Sci. 2022, 12, 693. https://doi.org/10.3390/app12020693
Radočaj D, Plaščak I, Heffer G, Jurišić M. A Low-Cost Global Navigation Satellite System Positioning Accuracy Assessment Method for Agricultural Machinery. Applied Sciences. 2022; 12(2):693. https://doi.org/10.3390/app12020693
Chicago/Turabian StyleRadočaj, Dorijan, Ivan Plaščak, Goran Heffer, and Mladen Jurišić. 2022. "A Low-Cost Global Navigation Satellite System Positioning Accuracy Assessment Method for Agricultural Machinery" Applied Sciences 12, no. 2: 693. https://doi.org/10.3390/app12020693
APA StyleRadočaj, D., Plaščak, I., Heffer, G., & Jurišić, M. (2022). A Low-Cost Global Navigation Satellite System Positioning Accuracy Assessment Method for Agricultural Machinery. Applied Sciences, 12(2), 693. https://doi.org/10.3390/app12020693