
Active Disturbance Rejection Control Based Sinusoidal Trajectory Tracking for an Upper Limb Robotic Rehabilitation Exoskeleton

 ,
,  , , , ,
, , , ,  and
and 
Abstract
:1. Introduction
1.1. Motivation and Background
1.2. Related Research
1.3. Purpose, Contribution, and Paper Structure
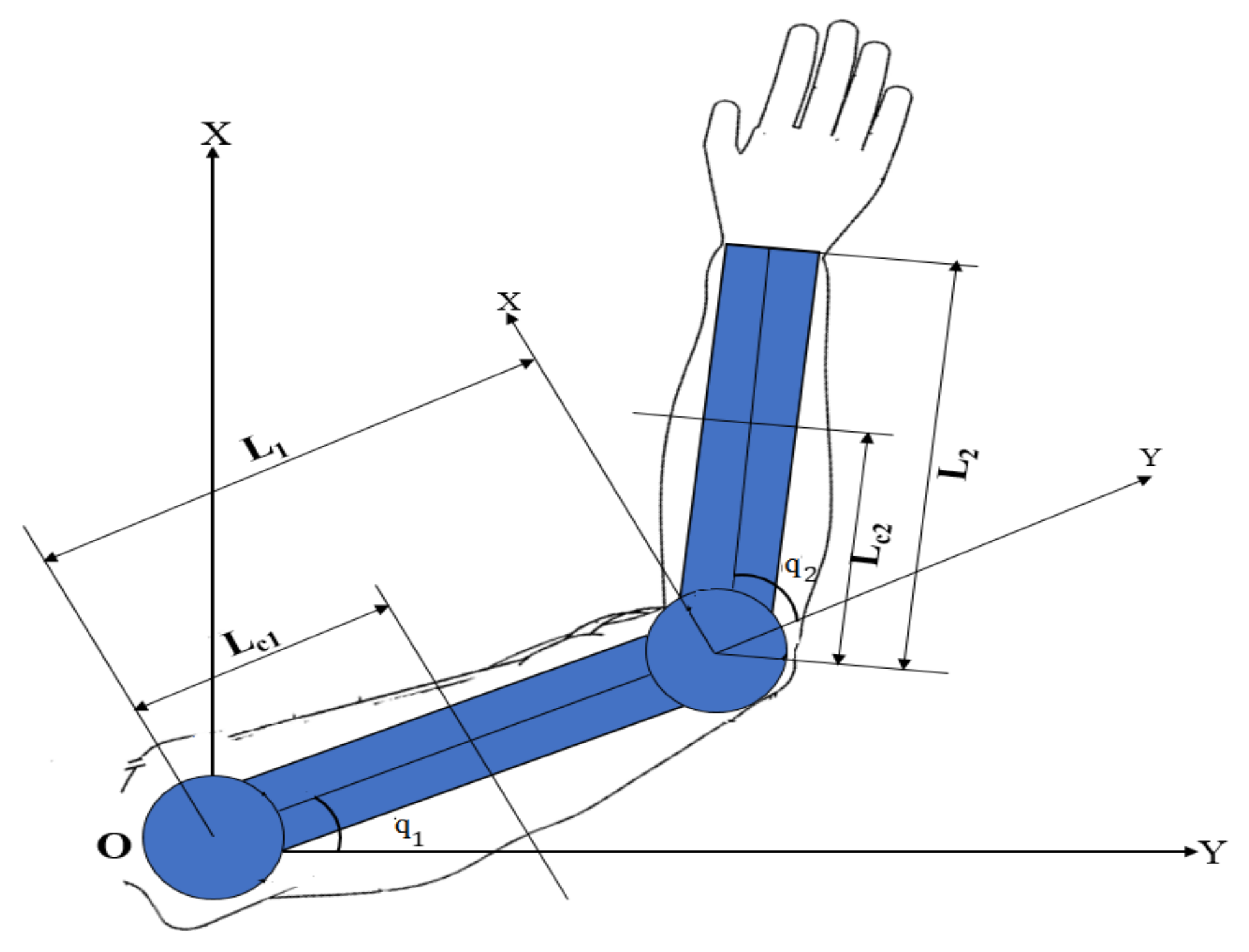
2. Modeling of Upper Limb Robotic Rehabilitation Exoskeleton
- Matrix is symmetric and positive definite.
- Matrix is a skew-symmetric if
- There are finite scalars , for which and , that suggest all elements of model are bounded.
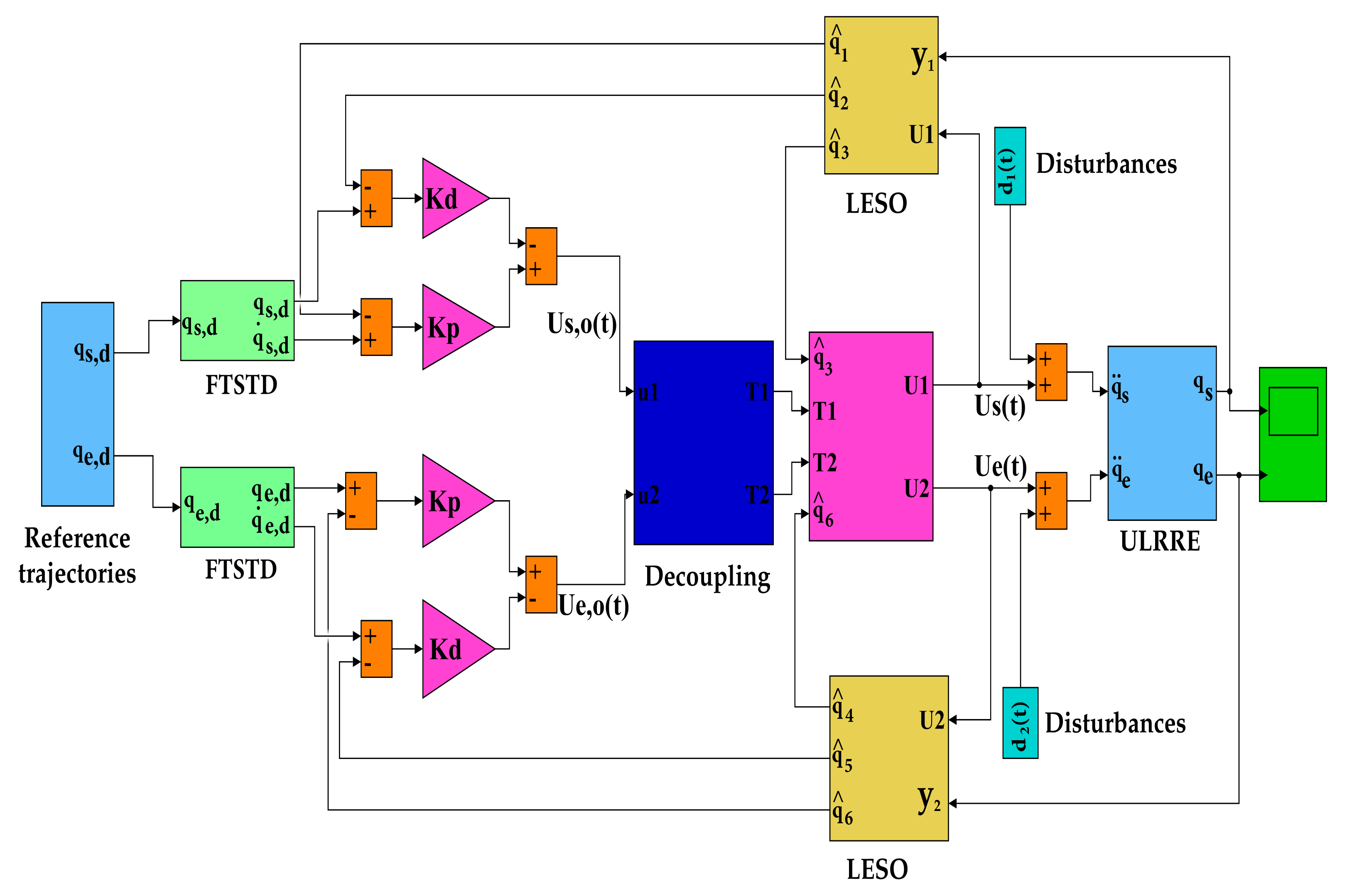
3. Topology of Proposed Method
3.1. Decoupling between Shoulder and Elbow Joint
3.2. Finite-Time Stable Tracking Differentiator
3.3. Linear Extended State Observer Design
4. Stability Analysis
5. Simulation Result Analysis
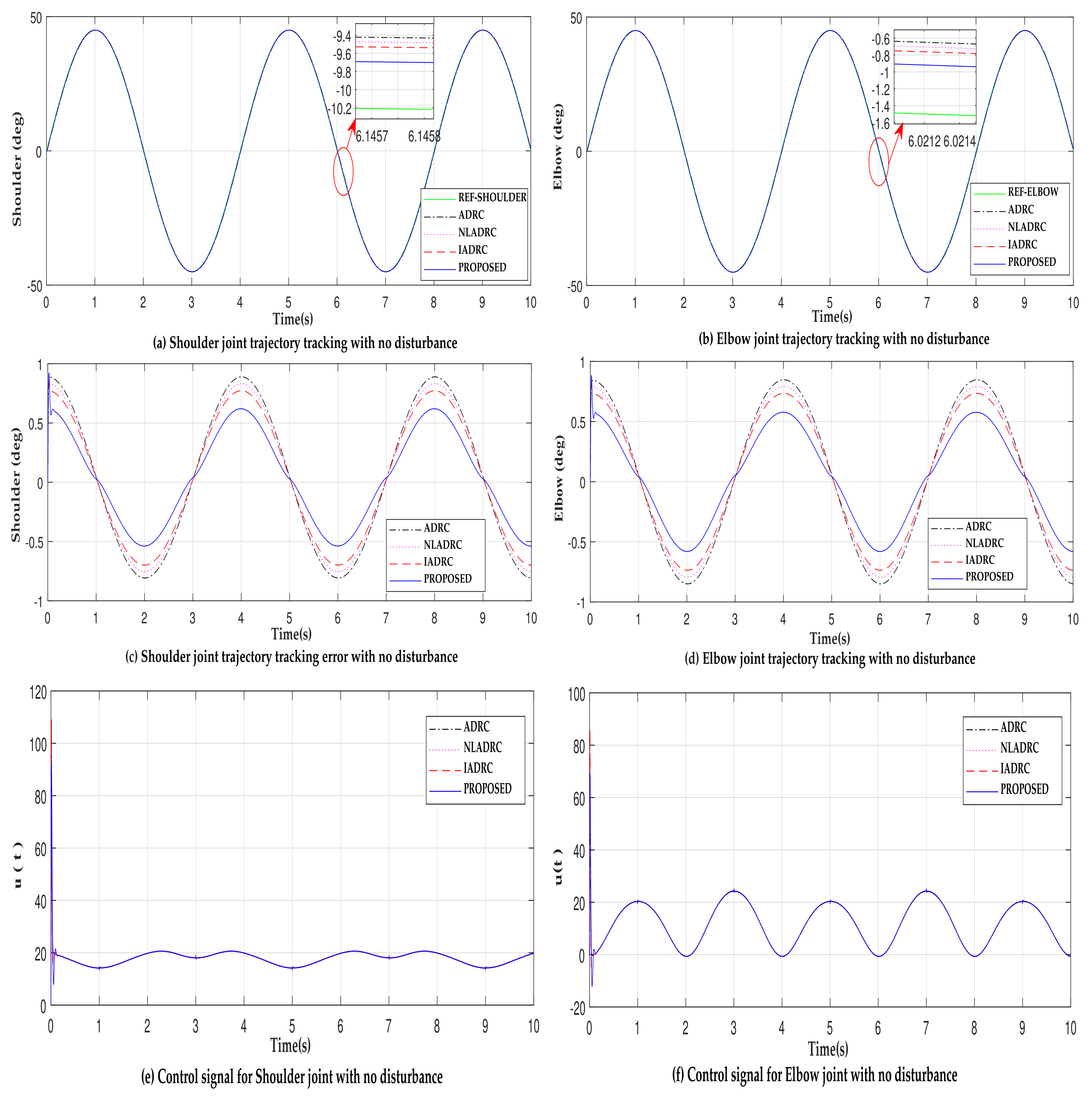
5.1. No Disturbance
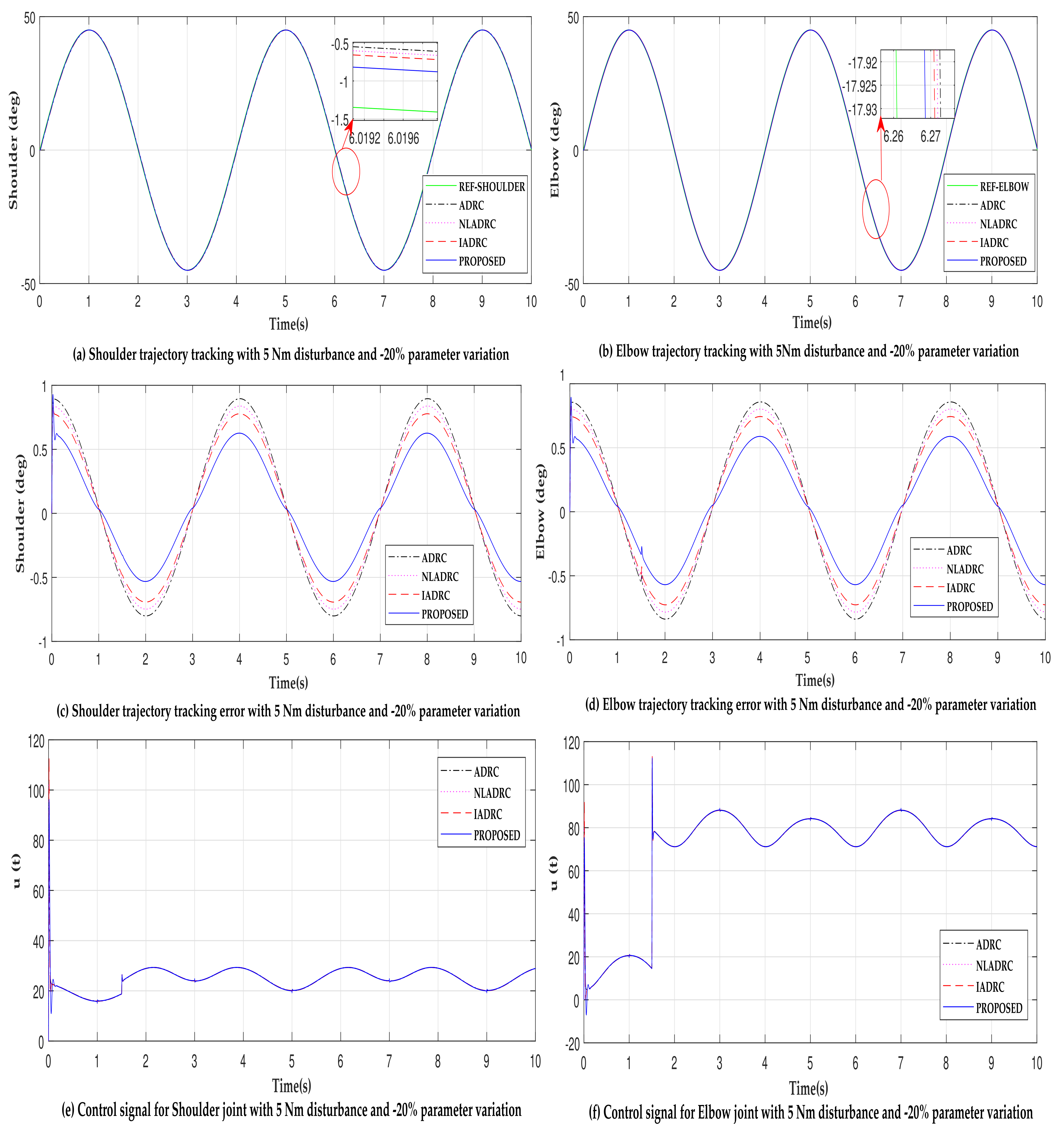
5.2. Effect of Disturbance and Parameter Variations
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qian, C.; Li, W.; Jia, T.; Li, C.; Lin, P.J.; Yang, Y.; Ji, L. Quantitative Assessment of Motor Function by an End-Effector Upper Limb Rehabilitation Robot Based on Admittance Control. Appl. Sci. 2021, 11, 6854. [Google Scholar] [CrossRef]
- Miao, Q.; Zhang, M.; Cao, J.; Xie, S.Q. Reviewing high-level control techniques on robot-assisted upper-limb rehabilitation. Adv. Robot. 2018, 32, 1253–1268. [Google Scholar] [CrossRef]
- Nguiadem, C.; Raison, M.; Achiche, S. Motion Planning of Upper-Limb Exoskeleton Robots: A Review. Appl. Sci. 2020, 10, 7626. [Google Scholar] [CrossRef]
- Jakob, I.; Kollreider, A.; Germanotta, M.; Benetti, F.; Cruciani, A.; Padua, L.; Aprile, I. Robotic and sensor technology for upper limb rehabilitation. PM&R 2018, 10, S189–S197. [Google Scholar]
- Lo, H.S.; Xie, S.Q. Exoskeleton robots for upper-limb rehabilitation: State of the art and future prospects. Med. Eng. Phys. 2012, 34, 261–268. [Google Scholar] [CrossRef] [PubMed]
- Guo, Z.; Yu, H.; Yin, Y.H. Developing a mobile lower limb robotic exoskeleton for gait rehabilitation. J. Med. Devices 2014, 8, 044503. [Google Scholar] [CrossRef]
- Zhang, L.; Guo, S.; Sun, Q. An assist-as-needed controller for passive, assistant, active, and resistive robot-aided rehabilitation training of the upper extremity. Appl. Sci. 2021, 11, 340. [Google Scholar] [CrossRef]
- Su, Y.; Sun, D.; Ren, L.; Mills, J.K. Integration of saturated PI synchronous control and PD feedback for control of parallel manipulators. IEEE Trans. Robot. 2006, 22, 202–207. [Google Scholar]
- Taha, Z.; Majeed, A.P.A.; Abidin, A.F.Z.; Ali, M.A.H.; Khairuddin, I.M.; Deboucha, A.; Tze, M.Y.W.P. A hybrid active force control of a lower limb exoskeleton for gait rehabilitation. Biomed. Tech. Eng. 2018, 63, 491–500. [Google Scholar] [CrossRef]
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot modeling and control. IEEE Control Syst. 2006, 26, 113–115. [Google Scholar]
- Lu, R.; Li, Z.; Su, C.Y.; Xue, A. Development and learning control of a human limb with a rehabilitation exoskeleton. IEEE Trans. Ind. Electron. 2013, 61, 3776–3785. [Google Scholar] [CrossRef]
- Jamwal, P.K.; Xie, S.Q.; Hussain, S.; Parsons, J.G. An adaptive wearable parallel robot for the treatment of ankle injuries. IEEE/ASME Trans. Mechatron. 2012, 19, 64–75. [Google Scholar] [CrossRef]
- Kazerooni, H.; Racine, J.L.; Huang, L.; Steger, R. On the control of the berkeley lower extremity exoskeleton (BLEEX). In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 4353–4360. [Google Scholar]
- Kazerooni, H.; Chu, A.; Steger, R. That which does not stabilize, will only make us stronger. Int. J. Robot. Res. 2007, 26, 75–89. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Zhu, Y.; Yang, X.; Zhang, Y. Impedance control of exoskeleton suit based on adaptive RBF neural network. In Proceedings of the 2009 International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2009; Volume 1, pp. 182–187. [Google Scholar]
- Li, S.; Yang, J.; Chen, W.H.; Chen, X. Disturbance observer-based control: Methods and applications. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016. [Google Scholar]
- Gao, Z.; Huang, Y.; Han, J. An alternative paradigm for control system design. In Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; Volume 5, pp. 4578–4585. [Google Scholar]
- Gao, Z.; Hu, S.; Jiang, F. A novel motion control design approach based on active disturbance rejection. In Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; Volume 5, pp. 4877–4882. [Google Scholar]
- Tian, G.; Gao, Z. Benchmark tests of active disturbance rejection control on an industrial motion control platform. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 5552–5557. [Google Scholar]
- Su, Y.X.; Duan, B.Y.; Zheng, C.H.; Zhang, Y.F.; Chen, G.D.; Mi, J.W. Disturbance-rejection high-precision motion control of a Stewart platform. IEEE Trans. Control Syst. Technol. 2004, 12, 364–374. [Google Scholar] [CrossRef]
- Ginhoux, R.; Gangloff, J.; de Mathelin, M.; Soler, L.; Sanchez, M.M.A.; Marescaux, J. Active filtering of physiological motion in robotized surgery using predictive control. IEEE Trans. Robot. 2005, 21, 67–79. [Google Scholar] [CrossRef] [Green Version]
- Zhu, E.; Pang, J.; Sun, N.; Gao, H.; Sun, Q.; Chen, Z. Airship horizontal trajectory tracking control based on Active Disturbance Rejection Control (ADRC). Non-Linear Dyn. 2013, 75, 725–734. [Google Scholar] [CrossRef]
- Qin, C.; Qi, N.; Lü, R.; Zhu, K. ADRC fractional order PID controller design of hypersonic flight vehicle. Trans. Nanjing Univ. Aeronaut. Astronaut. 2011, 28, 240–244. [Google Scholar]
- Desai, R.; Patre, B.M.; Pawar, S.N. Active disturbance rejection control with adaptive rate limitation for process control application. In Proceedings of the 2018 Indian Control Conference (ICC), Kanpur, India, 4–6 January 2018; pp. 131–136. [Google Scholar]
- Huang, Y.; Xue, W. Active disturbance rejection control: Methodology and theoretical analysis. ISA Trans. 2014, 53, 963–976. [Google Scholar] [CrossRef]
- Yu, T.; Chan, K.W.; Tong, J.P.; Zhou, B.; Li, D.H. Coordinated robust non-linear boiler-turbine-generator control systems via approximate dynamic feedback linearization. J. Process. Control 2010, 20, 365–374. [Google Scholar] [CrossRef]
- Huang, C.E.; Li, D.; Xue, Y. Active disturbance rejection control for the ALSTOM gasifier benchmark problem. Control Eng. Pract. 2013, 21, 556–564. [Google Scholar] [CrossRef]
- Dulf, E.H.; Both, R.; Muresan, C.I. Active disturbance rejection controller for a separation column. In Proceedings of the 2014 IEEE International Conference on Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, 22–24 May 2014; pp. 1–6. [Google Scholar]
- Tan, W.; Fu, C. Linear active disturbance-rejection control: Analysis and tuning via IMC. IEEE Trans. Ind. Electron. 2016, 63, 2350–2359. [Google Scholar] [CrossRef]
- Garran, P.T.; Garcia, G. Design of an optimal PID controller for a coupled tanks system employing ADRC. IEEE Lat. Am. Trans. 2017, 15, 189–196. [Google Scholar] [CrossRef]
- Pawar, S.N.; Chile, R.H.; Patre, B.M. Modified reduced order observer based linear active disturbance rejection control for TITO systems. ISA Trans. 2017, 71, 480–494. [Google Scholar] [CrossRef] [PubMed]
- Madonski, R.; Nowicki, M.; Przemys, l.H. Application of active disturbance rejection controller to water supply system. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 4401–4405. [Google Scholar]
- Zheng, Q.; Gao, Z. An energy saving, factory-validated disturbance decoupling control design for extrusion processes. In Proceedings of the 10th World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012; pp. 2891–2896. [Google Scholar]
- Zeng, D.; Yu, Z.; Xiong, L.; Fu, Z.; Li, Z.; Zhang, P.; Leng, B.; Shan, F. HFO-LADRC lateral motion controller for autonomous road sweeper. Sensors 2020, 20, 2274. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Ding, P.; Gao, Z. Fractional active disturbance rejection control. ISA Trans. 2016, 62, 109–119. [Google Scholar] [CrossRef] [PubMed]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Han, J. Auto-disturbances-rejection controller and its applications. Control Decis. 1998, 13, 19–23. (In Chinese) [Google Scholar]
- Gao, Z. Active disturbance rejection control: A paradigm shift in feedback control system design. In Proceedings of the American Control Conference 2006, Minneapolis, MN, USA, 14–16 June 2006; p. 7. [Google Scholar]
- Viteckova, S.; Kutilek, P.; Jirina, M. Wearable lower limb robotics: A review. Biocybern. Biomed. Eng. 2013, 33, 96–105. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Cong, L.; Wang, W.; Zhang, Z.; Dong, W. Active disturbance rejection control based human gait tracking for lower extremity rehabilitation exoskeleton. ISA Trans. 2017, 67, 389–397. [Google Scholar] [CrossRef]
- Guerrero-Castellanos, J.F.; Rifa, H.; Arnez-Paniagua, V.; Linares-Flores, J.; Saynes-Torres, L.; Mohammed, S. Robust Active Disturbance Rejection Control via Control Lyapunov Functions: Application to Actuated-Ankle-Foot-Orthosis. Control Eng. Pract. 2018, 80, 49–60. [Google Scholar] [CrossRef]
- Meng, W.; Liu, Q.; Zhou, Z.; Ai, Q.; Sheng, B.; Xie, S.S. Recent development of mechanisms and control strategies for robot-assisted lower limb rehabilitation. Mechatronics 2015, 31, 132–145. [Google Scholar] [CrossRef]
- Roman, R.C.; Precup, R.E.; Bojan-Dragos, C.A.; Szedlak-Stinean, A.I. Combined Model-Free Adaptive Control with Fuzzy Component by Virtual Reference Feedback Tuning for Tower Crane Systems. Procedia Comput. Sci. 2019, 162, 267–274. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, X.; Ji, H.; Hou, Z.; Fan, L. Multi-Agent-Based Data-Driven Distributed Adaptive Cooperative Control in Urban Traffic Signal Timing. Energies 2019, 12, 1402. [Google Scholar] [CrossRef] [Green Version]
- Joe, H.M.; Oh, J.H. A Robust Balance-Control Framework for the Terrain-Blind Bipedal Walking of a Humanoid Robot on Unknown and Uneven Terrain. Sensors 2019, 19, 4194. [Google Scholar] [CrossRef] [Green Version]
- Hassan, M.; Kadone, H.; Suzuki, K.; Sankai, Y. Wearable gait measurement system with an instrumented cane for exoskeleton control. Sensors 2014, 14, 1705–1722. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Del-Ama, A.J.; Moreno, J.C.; Gil-Agudo, A.; De-los Reyes, A.; Pons, J.L. Online assessment of human-robot interaction for hybrid control of walking. Sensors 2012, 12, 215–225. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Long, Y.; Du, Z.J.; Wang, W.D.; Dong, W. Robust sliding mode control based on GA optimization and CMAC compensation for lower limb exoskeleton. Appl. Bionics Biomech. 2016, 2016, 5017381. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, G.; Chan, C.K.; Guo, Z.; Yu, H. A review of lower extremity assistive robotic exoskeletons in rehabilitation therapy. Crit. Rev. Biomed. Eng. 2013, 41, 4–5. [Google Scholar] [CrossRef] [PubMed]
- Bortole, M.; Venkatakrishnan, A.; Zhu, F.; Moreno, J.C.; Francisco, G.E.; Pons, J.L.; Contreras-Vidal, J.L. The H2 robotic exoskeleton for gait rehabilitation after stroke: Early findings from a clinical study. J. Neuroeng. Rehabil. 2015, 12, 54. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aole, S.; Elamvazuthi, I.; Waghmare, L.; Patre, B.; Meriaudeau, F. Non-linear active disturbance rejection control for upper limb rehabilitation exoskeleton. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2021, 235, 606–632. [Google Scholar] [CrossRef]
- Aole, S.; Elamvazuthi, I.; Waghmare, L.; Patre, B.; Meriaudeau, F. Improved active disturbance rejection control for trajectory tracking control of lower limb robotic rehabilitation exoskeleton. Sensors 2020, 20, 3681. [Google Scholar] [CrossRef] [PubMed]
- Guo, B.-Z.; Zhao, Z.-L. Active Disturbance Rejection Control for Non-Linear Systems: An Introduction; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; Volume 6, pp. 4989–4996. [Google Scholar]
- MATLAB/Simulink (2017b, The Mathworks, Inc., Natick, MA, USA). Available online: https://www.mathworks.com/products/matlab.html (accessed on 1 November 2021).
- Tavazoei, M.S. Notes on integral performance indices in fractional-order contro systems. J. Process Control 2010, 20, 285–291. [Google Scholar] [CrossRef]
- Dorf, R.C.; Bishop, R.H. Modern Control Systems; Pearson: London, UK, 2011. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Upper Limb Parameters | Parameter | Value | Units |
|---|---|---|---|
| Limb and exoskeleton masses | 2.25 | kg | |
| 1.47 | kg | ||
| Limb lengths | 0.34 | m | |
| 0.25 | m | ||
| Center of mass | 0.25 | m | |
| 0.125 | m | ||
| Mass moment of inertia for exoskeleton and limbs | 0.2505 | kg·m | |
| 0.0925 | kg·m |
| Notation | Description |
|---|---|
| Inertia matrix. | |
| Coriolis and centrifugal force matrix. | |
| Gravitational force matrix. | |
| Control input vector. | |
| Denotes unmodeled dynamics and external disturbances matrix. | |
| and angle traced by shoulder and elbow joints. | |
| and are torques of both the joints. |
| Control Method | Proposed | IADRC [52] | NLADRC [51] | ADRC [40] | |||||
|---|---|---|---|---|---|---|---|---|---|
| Joints | Shoulder | Elbow | Shoulder | Elbow | Shoulder | Elbow | Shoulder | Elbow | |
| Performance indices | ITSE (Deg.) | 7.515 | 7.499 | 13.6 | 13.59 | 15.72 | 15.71 | 17.98 | 17.97 |
| ISE (Deg.) | 1.516 | 1.509 | 2.727 | 2.721 | 3.15 | 3.143 | 3.603 | 3.595 | |
| ITAE (Deg.) | 16.83 | 16.88 | 23.48 | 23.51 | 25.21 | 25.23 | 26.96 | 26.99 | |
| IAE (Deg.) | 3.374 | 3.383 | 4.702 | 4.704 | 5.046 | 5.048 | 5.397 | 5.399 | |
| Upper Limb Parameters | Parameter | Actual Value | Units | ||
|---|---|---|---|---|---|
| Limb and exoskeleton masses | 2.25 | 1.8 | 2.7 | kg | |
| 1.47 | 1.176 | 1.764 | kg | ||
| Limb lengths | 0.34 | 0.272 | 0.408 | m | |
| 0.25 | 0.2 | 0.3 | m | ||
| Center of mass | 0.17 | 0.136 | 0.204 | m | |
| 0.125 | 0.1 | 0.15 | m | ||
| Mass moment of inertia for exoskeleton and limbs | 0.2505 | 0.2004 | 0.3006 | kg·m | |
| 0.0925 | 0.074 | 0.111 | kg·m |
| Shoulder Joint | ||||||||
|---|---|---|---|---|---|---|---|---|
| ITSE (Deg.) | ISE (Deg.) | ITAE (Deg.) | IAE (Deg.) | |||||
| Control method | −20% | +20% | −20% | +20% | −20% | +20% | −20% | +20% |
| Proposed | 7.529 | 7.534 | 1.52 | 1.52 | 16.83 | 16.84 | 3.377 | 3.379 |
| IADRC [52] | 13.61 | 13.61 | 2.73 | 2.73 | 23.48 | 23.49 | 4.703 | 4.703 |
| NLADRC [51] | 15.73 | 15.74 | 3.154 | 3.154 | 25.21 | 25.21 | 5.047 | 5.048 |
| ADRC [40] | 18 | 18 | 3.607 | 3.607 | 26.96 | 26.97 | 5.398 | 5.399 |
| Elbow Joint | ||||||||
|---|---|---|---|---|---|---|---|---|
| ITSE (Deg.) | ISE (Deg.) | ITAE (Deg.) | IAE (Deg.) | |||||
| Control method | −20% | +20% | −20% | +20% | −20% | +20% | −20% | +20% |
| Proposed | 7.501 | 7.522 | 1.51 | 1.516 | 16.88 | 16.93 | 3.383 | 3.395 |
| IADRC [52] | 13.59 | 13.60 | 2.721 | 2.726 | 23.50 | 23.51 | 4.703 | 4.707 |
| NLADRC [51] | 15.71 | 15.72 | 3.144 | 3.149 | 25.23 | 25.24 | 5.047 | 5.052 |
| ADRC [40] | 17.97 | 17.99 | 3.596 | 3.602 | 26.98 | 27 | 5.398 | 5.403 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aole, S.; Elamvazuthi, I.; Waghmare, L.; Patre, B.; Bhaskarwar, T.; Meriaudeau, F.; Su, S. Active Disturbance Rejection Control Based Sinusoidal Trajectory Tracking for an Upper Limb Robotic Rehabilitation Exoskeleton. Appl. Sci. 2022, 12, 1287. https://doi.org/10.3390/app12031287
Aole S, Elamvazuthi I, Waghmare L, Patre B, Bhaskarwar T, Meriaudeau F, Su S. Active Disturbance Rejection Control Based Sinusoidal Trajectory Tracking for an Upper Limb Robotic Rehabilitation Exoskeleton. Applied Sciences. 2022; 12(3):1287. https://doi.org/10.3390/app12031287
Chicago/Turabian StyleAole, Sumit, Irraivan Elamvazuthi, Laxman Waghmare, Balasaheb Patre, Tushar Bhaskarwar, Fabrice Meriaudeau, and Steven Su. 2022. "Active Disturbance Rejection Control Based Sinusoidal Trajectory Tracking for an Upper Limb Robotic Rehabilitation Exoskeleton" Applied Sciences 12, no. 3: 1287. https://doi.org/10.3390/app12031287
APA StyleAole, S., Elamvazuthi, I., Waghmare, L., Patre, B., Bhaskarwar, T., Meriaudeau, F., & Su, S. (2022). Active Disturbance Rejection Control Based Sinusoidal Trajectory Tracking for an Upper Limb Robotic Rehabilitation Exoskeleton. Applied Sciences, 12(3), 1287. https://doi.org/10.3390/app12031287