

Experimental Verification of the CFD Model of the Squeeze Film Lifting Effect


Abstract
:1. Introduction
1.1. Applications
1.2. Experimental Research
1.2.1. Inducer Type
1.2.2. Measurement Techniques
1.3. Unresolved Issues
2. Materials and Methods
2.1. Experimental Research
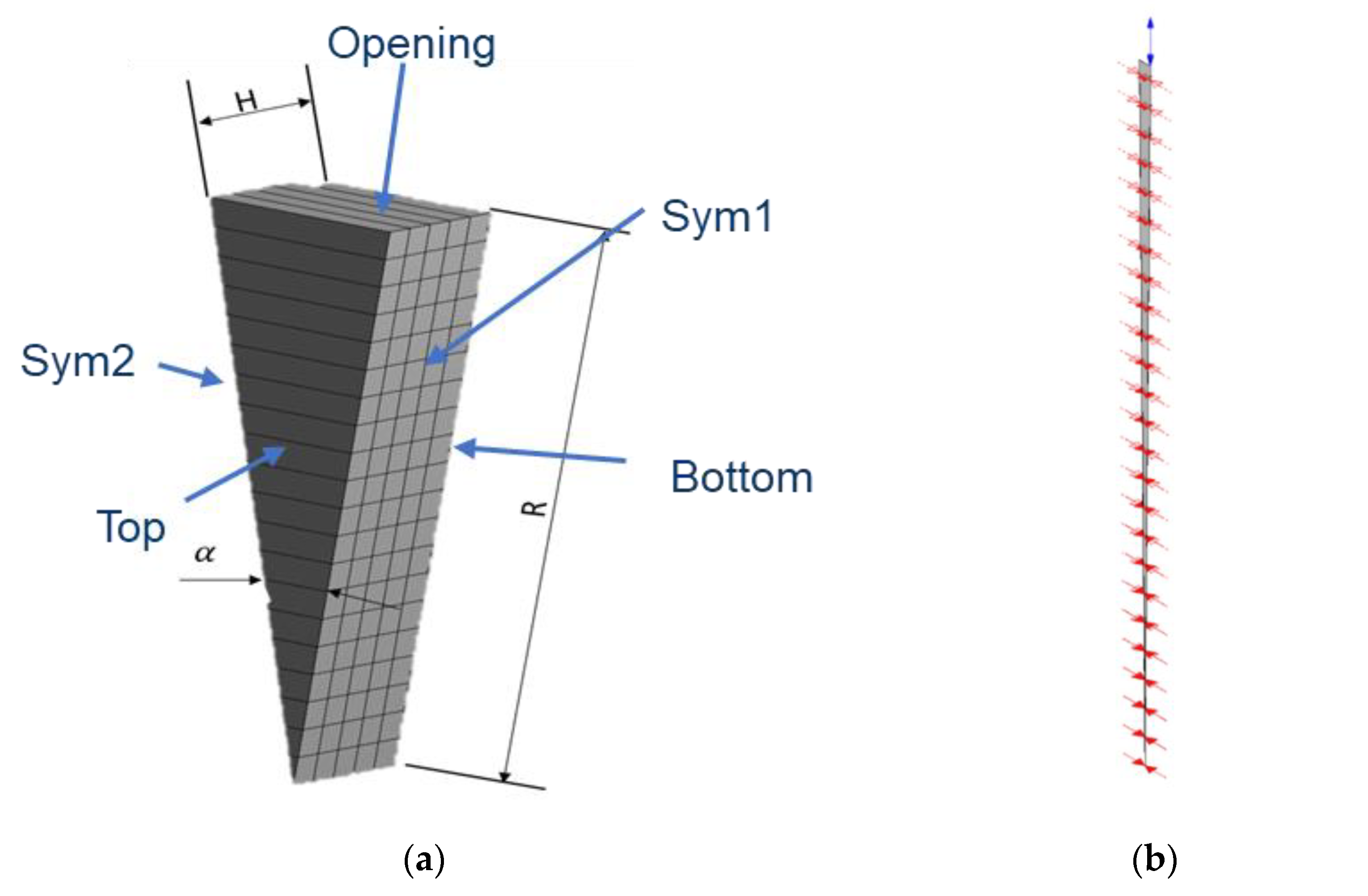
2.2. Description of the CFD Model
3. Results
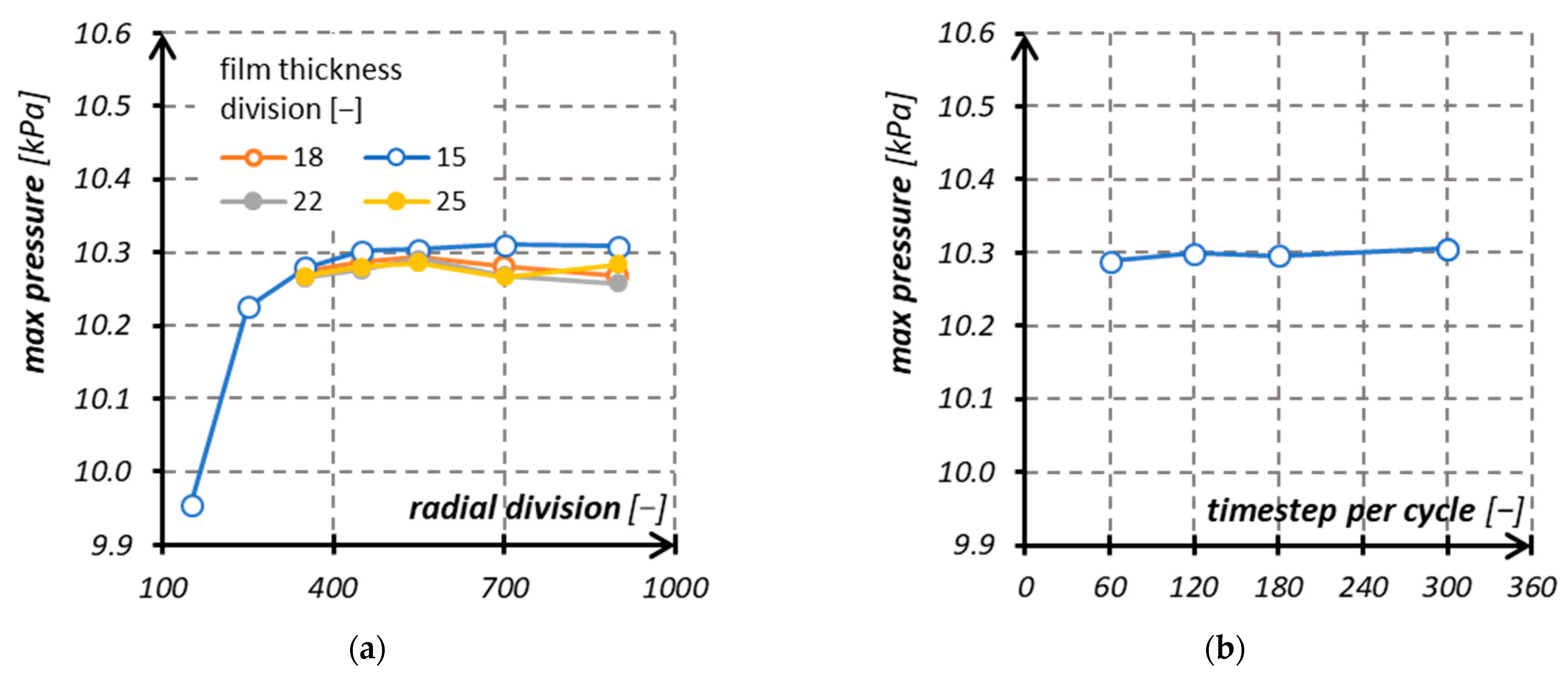
3.1. Verification of the CFD Model
3.2. Results of Spherical Deformation
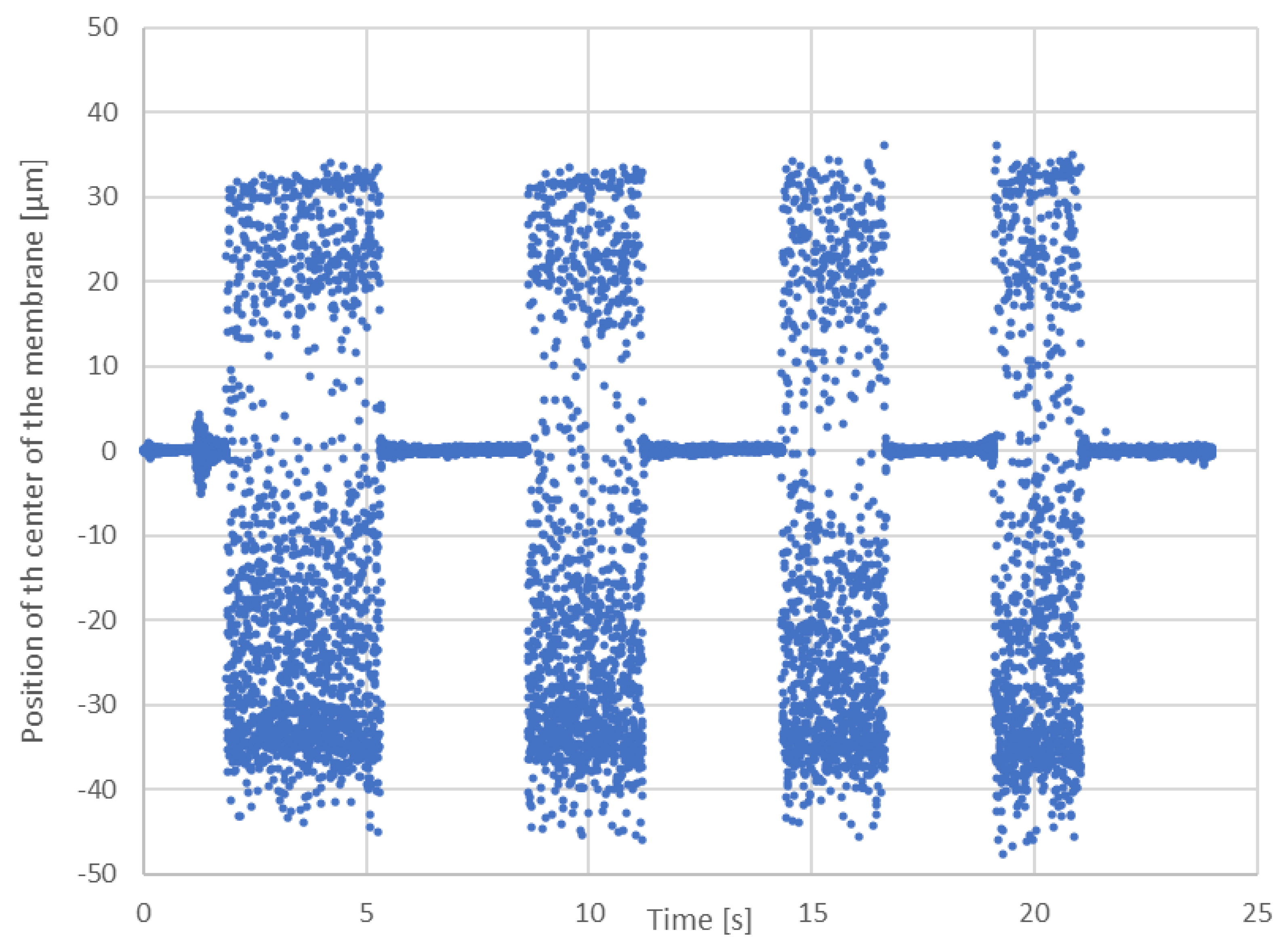
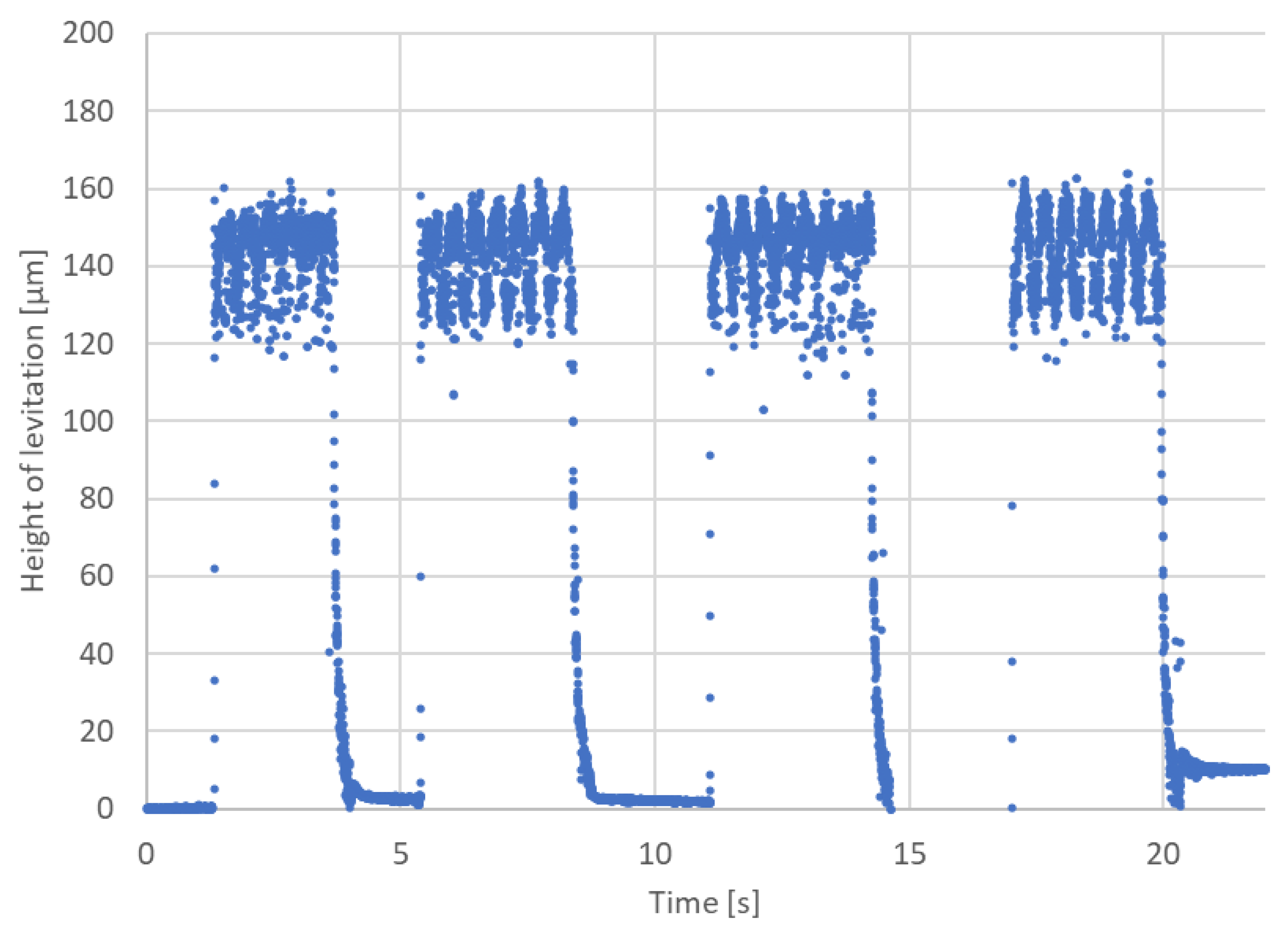
3.3. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kandemir, M.H.; Çalışkan, M. Standing Wave Acoustic Levitation on an Annular Plate. J. Sound Vib. 2016, 382, 227–237. [Google Scholar] [CrossRef]
- Hashimoto, Y.; Koike, Y.; Ueha, S. Near-field Acoustic Levitation of Planar Specimens Using Flexural Vibration. J. Acoust. Soc. Am. 1996, 100, 2057–2061. [Google Scholar] [CrossRef]
- Yoshimoto, S.; Anno, Y.; Sato, Y.; Hamanaka, K. Float Characteristics of Squeeze-Film Gas Bearing with Elastic Hinges for Linear Motion Guide. JSME Int. J. Ser. C 1997, 40, 353–359. [Google Scholar] [CrossRef]
- Yoshimoto, S.; Kobayashi, H.; Miyatake, M. Float Characteristics of a Squeeze-Film Air Bearing for a Linear Motion Guide Using Ultrasonic Vibration. Tribol. Int. 2007, 40, 503–511. [Google Scholar] [CrossRef]
- Ide, T.; Friend, J.; Nakamura, K.; Ueha, S. A Non-Contact Linear Bearing and Actuator via Ultrasonic Levitation. Sens. Actuators A Phys. 2007, 135, 740–747. [Google Scholar] [CrossRef]
- Wei, B.; Shaham, R.; Bucher, I. Theoretical Investigation and Prototype Design for Non-Parallel Squeeze Film Movement Platform Driven by Standing Waves. Tribol. Int. 2018, 119, 539–548. [Google Scholar] [CrossRef]
- Stolarski, T.A.; Gawarkiewicz, R.; Tesch, K. Acoustic Journal Bearing—A Search for Adequate Configuration. Tribol. Int. 2015, 92, 387–394. [Google Scholar] [CrossRef]
- Stolarski, T.A.; Gawarkiewicz, R.; Tesch, K. Acoustic Journal Bearing-Performance under Various Load and Speed Conditions. Tribol. Int. 2016, 102, 297–304. [Google Scholar] [CrossRef]
- Stolarski, T.A.; Miyatake, M. Acoustic Journal Bearing With Changeable Geometry and Built-in Flexibility. J. Tribol. 2018, 140, 061707. [Google Scholar] [CrossRef]
- Bucher, I.; Shaham, R.; Ilssar, D.; Gabai, R.; Cohen, N. A Rotational Traveling Wave Based Levitation Device—Modelling, Design, and Control. Sensors Actuators A Phys. 2016, 255, 34–45. [Google Scholar] [CrossRef]
- Chen, C.; Wang, J.; Jia, B.; Li, F. Design of a Noncontact Spherical Bearing Based on Near-Field Acoustic Levitation. J. Intell. Mater. Syst. Struct. 2014, 25, 755–767. [Google Scholar] [CrossRef]
- Brunetière, N.; Blouin, A.; Kastane, G. Conditions of Lift-Off and Film Thickness in Squeeze Film Levitation. J. Tribol. 2017, 140, 031705. [Google Scholar] [CrossRef]
- Matsuo, E.; Koike, Y.; Nakamura, K.; Ueha, S.; Hashimoto, Y. Holding Characteristics of Planar Objects Suspended by Near-Field Acoustic Levitation. Ultrasonics 2000, 38, 60–63. [Google Scholar] [CrossRef]
- Hashimoto, Y.; Koike, Y.; Ueha, S. Transporting Objects without Contact Using Flexural Traveling Waves. J. Acoust. Soc. Am. 1996, 103, 3230–3233. [Google Scholar] [CrossRef]
- Ueha, S.; Hashimoto, Y.; Koike, Y. Non-Contact Transportation Using Near-Field Acoustic Levitation. Ultrasonics 2000, 38, 26–32. [Google Scholar] [CrossRef]
- Stolarski, T.A.; Xue, Y.; Yoshimoto, S. Air Journal Bearing Utilizing Near-Field Acoustic Levitation Stationary Shaft Case. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2011, 225, 120–127. [Google Scholar] [CrossRef]
- Stolarski, T.A. Numerical Modeling and Experimental Verification of Compressible Squeeze Film Pressure. Tribol. Int. 2010, 43, 356–360. [Google Scholar] [CrossRef]
- Zhao, S.; Mojrzisch, S.; Wallaschek, J. An Ultrasonic Levitation Journal Bearing Able to Control Spindle Center Position. Mech. Syst. Signal Process. 2013, 36, 168–181. [Google Scholar] [CrossRef]
- Brunetière, N.; Wodtke, M. Considerations about the Applicability of the Reynolds Equation for Analyzing High-Speed Near Field Levitation Phenomena. J. Sound Vib. 2020, 483, 115496. [Google Scholar] [CrossRef]
- Ilssar, D.; Bucher, I.; Flashner, H. Modeling and Closed Loop Control of Near-Field Acoustically Levitated Objects. Mech. Syst. Signal Process. 2017, 85, 367–381. [Google Scholar] [CrossRef]
- Li, W.; Liu, Y.; Feng, K. Modelling and Experimental Study on the Influence of Surface Grooves on Near-Field Acoustic Levitation. Tribol. Int. 2017, 116, 138–146. [Google Scholar] [CrossRef]
- Li, J.; Liu, P.; Ding, H.; Cao, W. Nonlinear Restoring Forces and Geometry Influence on Stability in Near-Field Acoustic Levitation. J. Appl. Phys. 2011, 109, 2–6. [Google Scholar] [CrossRef]
- Melikhov, I.; Chivilikhin, S.; Amosov, A.; Jeanson, R. Viscoacoustic Model for Near-Field Ultrasonic Levitation. Phys. Rev. E 2016, 94, 053103. [Google Scholar] [CrossRef] [PubMed]
- Lead Titanium Zirconium Oxide|O5PbTiZr-PubChem. Available online: https://pubchem.ncbi.nlm.nih.gov/compound/Lead-titanium-zirconium-oxide (accessed on 13 December 2022).
- ANSYS CFX 18.2 Documentation—Pre Theory Guide; Swanson Analysis Inc.: Houston, PA, USA, 2017.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample Diameter | ϕ20 | ϕ25 | ϕ30 |
|---|---|---|---|
| Mass of Samples [g] | |||
| Single sample (×1) | 0.118 | 0.177 | 0.270 |
| Double sample (×2) | 0.236 | 0.390 | 0.511 |
| Triple sample (×3) | 0.373 | 0.560 | 0.799 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bastian, B.; Gawarkiewicz, R.; Wasilczuk, M.; Wodtke, M. Experimental Verification of the CFD Model of the Squeeze Film Lifting Effect. Appl. Sci. 2023, 13, 6441. https://doi.org/10.3390/app13116441
Bastian B, Gawarkiewicz R, Wasilczuk M, Wodtke M. Experimental Verification of the CFD Model of the Squeeze Film Lifting Effect. Applied Sciences. 2023; 13(11):6441. https://doi.org/10.3390/app13116441
Chicago/Turabian StyleBastian, Bartosz, Rafał Gawarkiewicz, Michał Wasilczuk, and Michał Wodtke. 2023. "Experimental Verification of the CFD Model of the Squeeze Film Lifting Effect" Applied Sciences 13, no. 11: 6441. https://doi.org/10.3390/app13116441
APA StyleBastian, B., Gawarkiewicz, R., Wasilczuk, M., & Wodtke, M. (2023). Experimental Verification of the CFD Model of the Squeeze Film Lifting Effect. Applied Sciences, 13(11), 6441. https://doi.org/10.3390/app13116441