
Research on the Influence of Exoskeletons on Human Characteristics by Modeling and Simulation Using the AnyBody Modeling System
Abstract
:1. Introduction
- The gait parameters and biomechanical load of the human body change after wearing a lower extremity exoskeleton.
- There are differences in the changes in gait parameters and biomechanical parameters between the exoskeleton worn by patients with unilateral dyskinesia and those worn by normal subjects.
- By studying the changes in gait parameters and biomechanical parameters of the exoskeleton, the design of the exoskeleton can be optimized.
2. Model Development
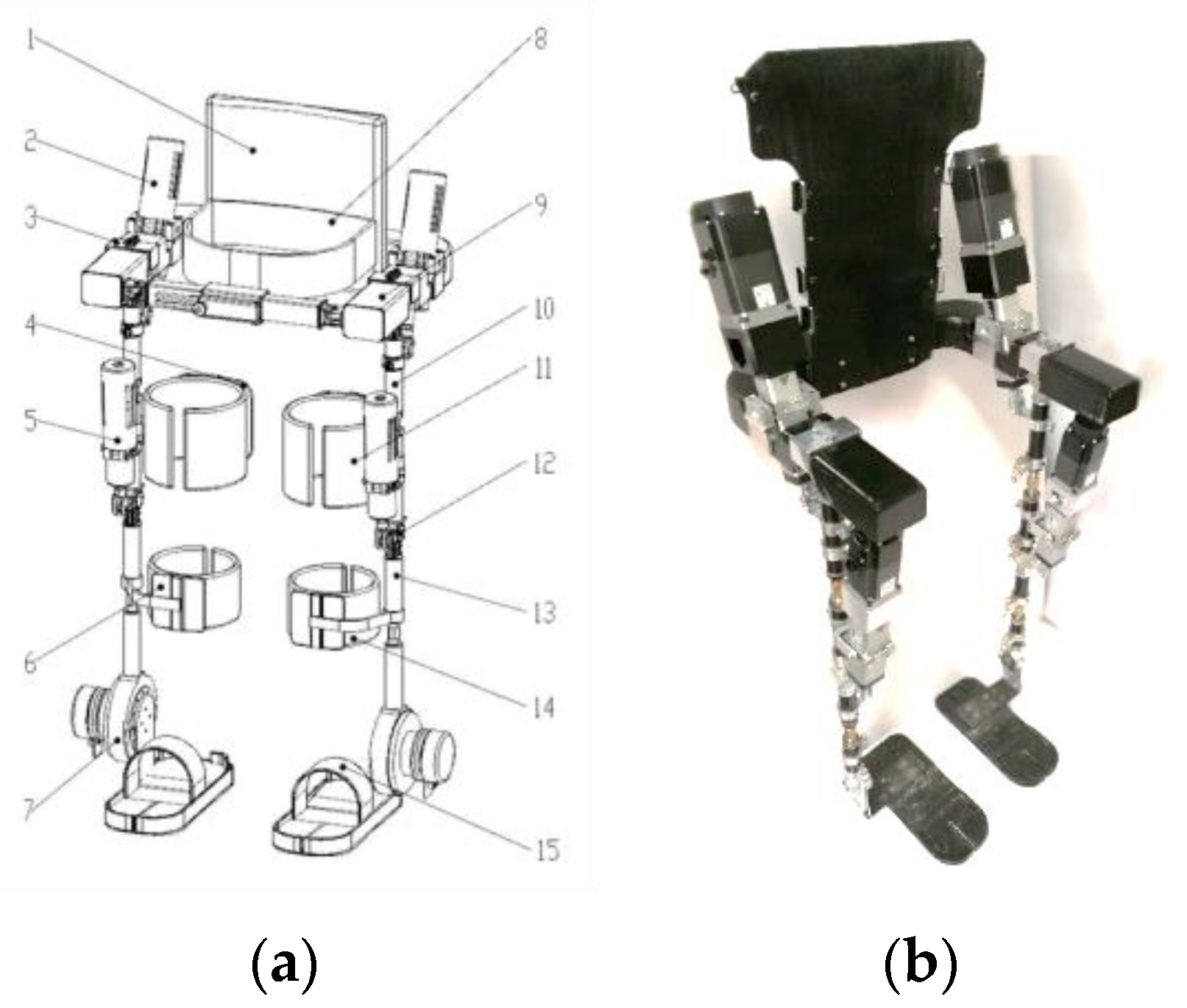
2.1. The Proposed Novel Lower Limb Exoskeleton Robot
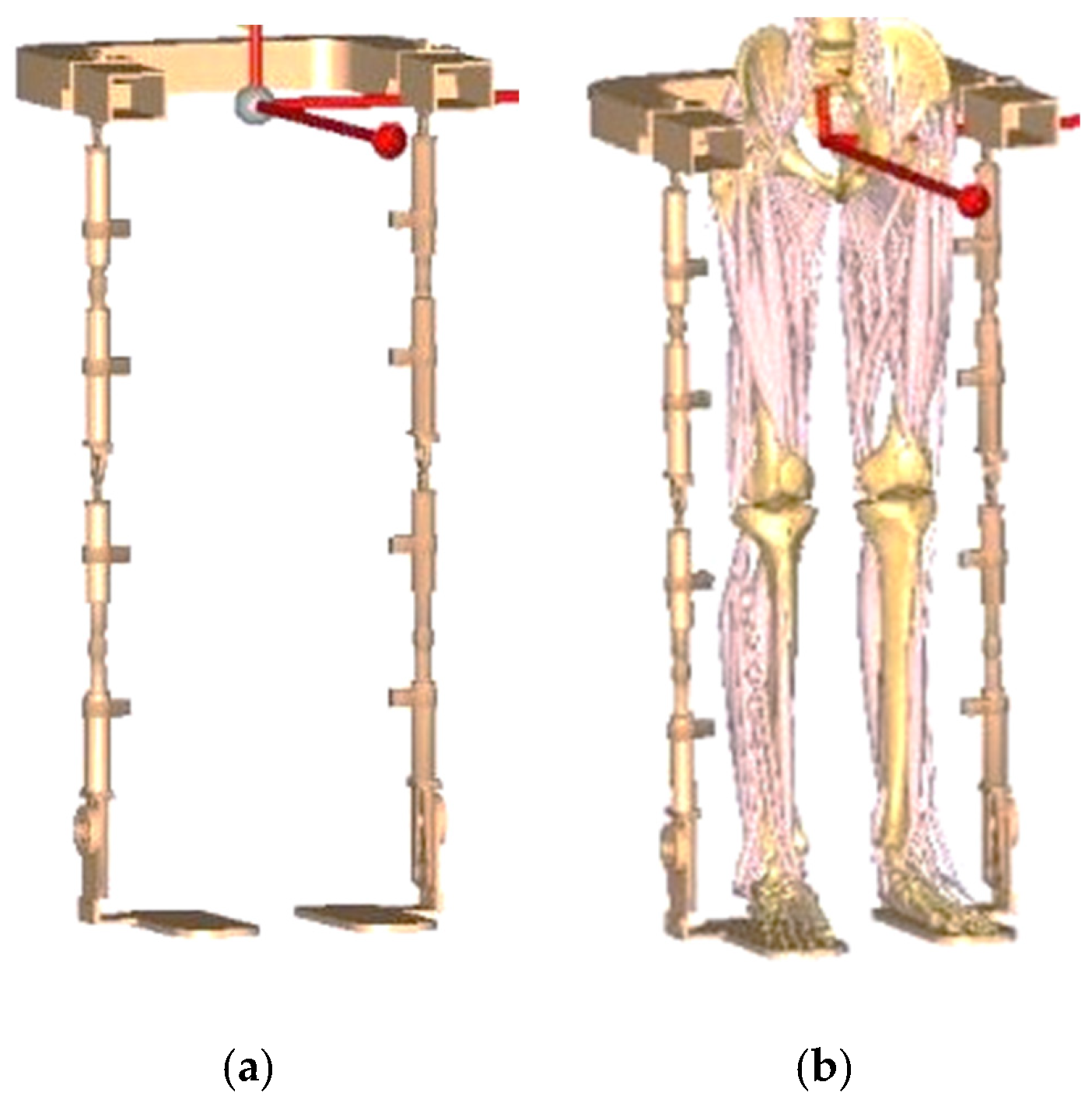
2.2. Musculoskeletal Model Construction
3. Experiment
3.1. Participants
3.2. Gait Experiments
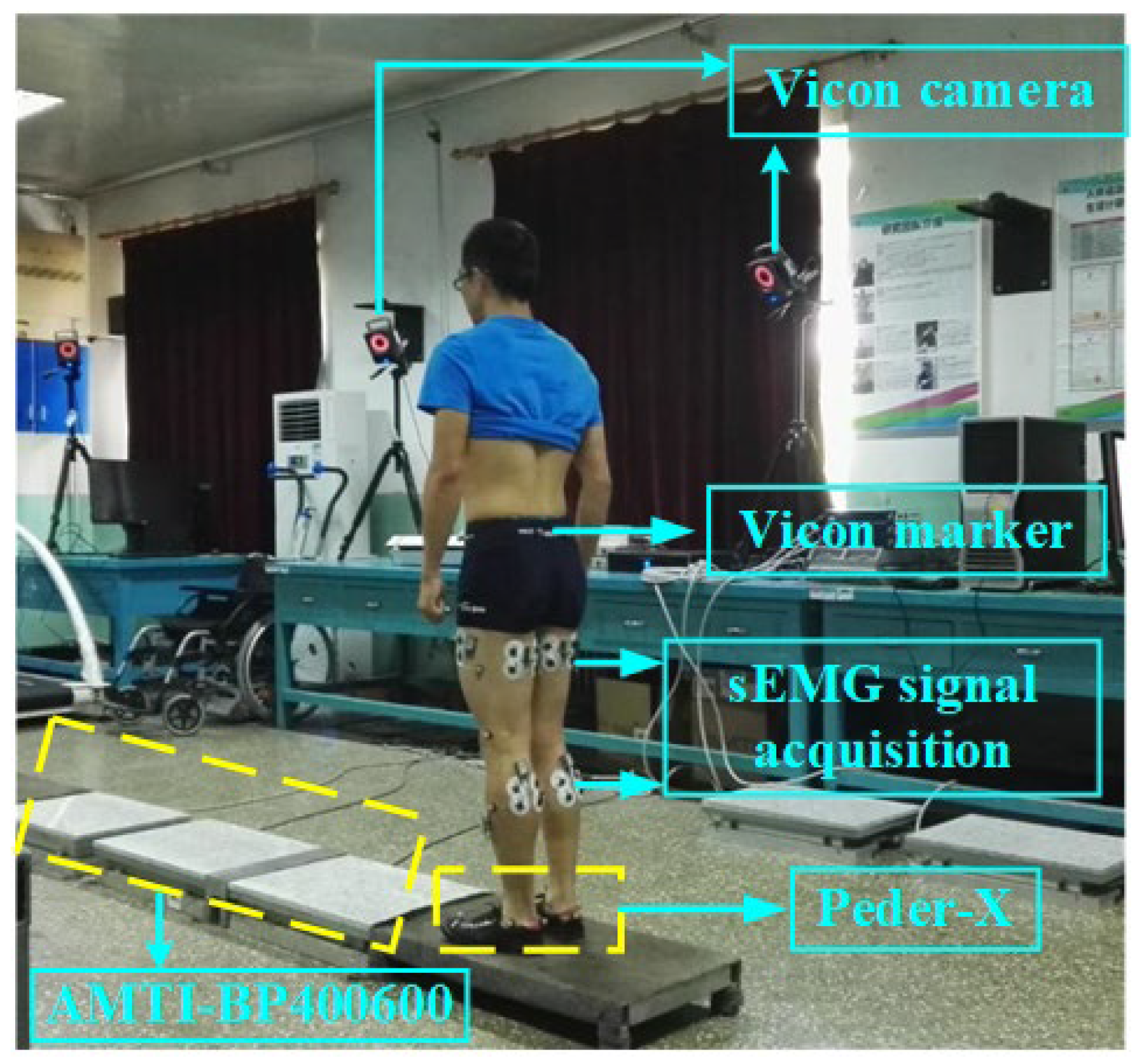
- All participants were required to walk on a straight test bench (AMTI BP-400600), just as shown in Figure 5.
- To eliminate the error between different tests, the gait cycle was standardized. A complete gait cycle is 100%. The beginning of the gait cycle, 0%, means the right heel first touches the ground. The end point 100% represents the right heel touching the ground again.
- The walking test was repeated 5 times for each participant. Appropriate rest between sets was also given to exclude the effects of muscle fatigue.
3.3. Muscle Parameters Selection
3.4. Data Analysis
4. Results
4.1. Comparison between the Human-Exoskeleton Model and the Human-Only Model
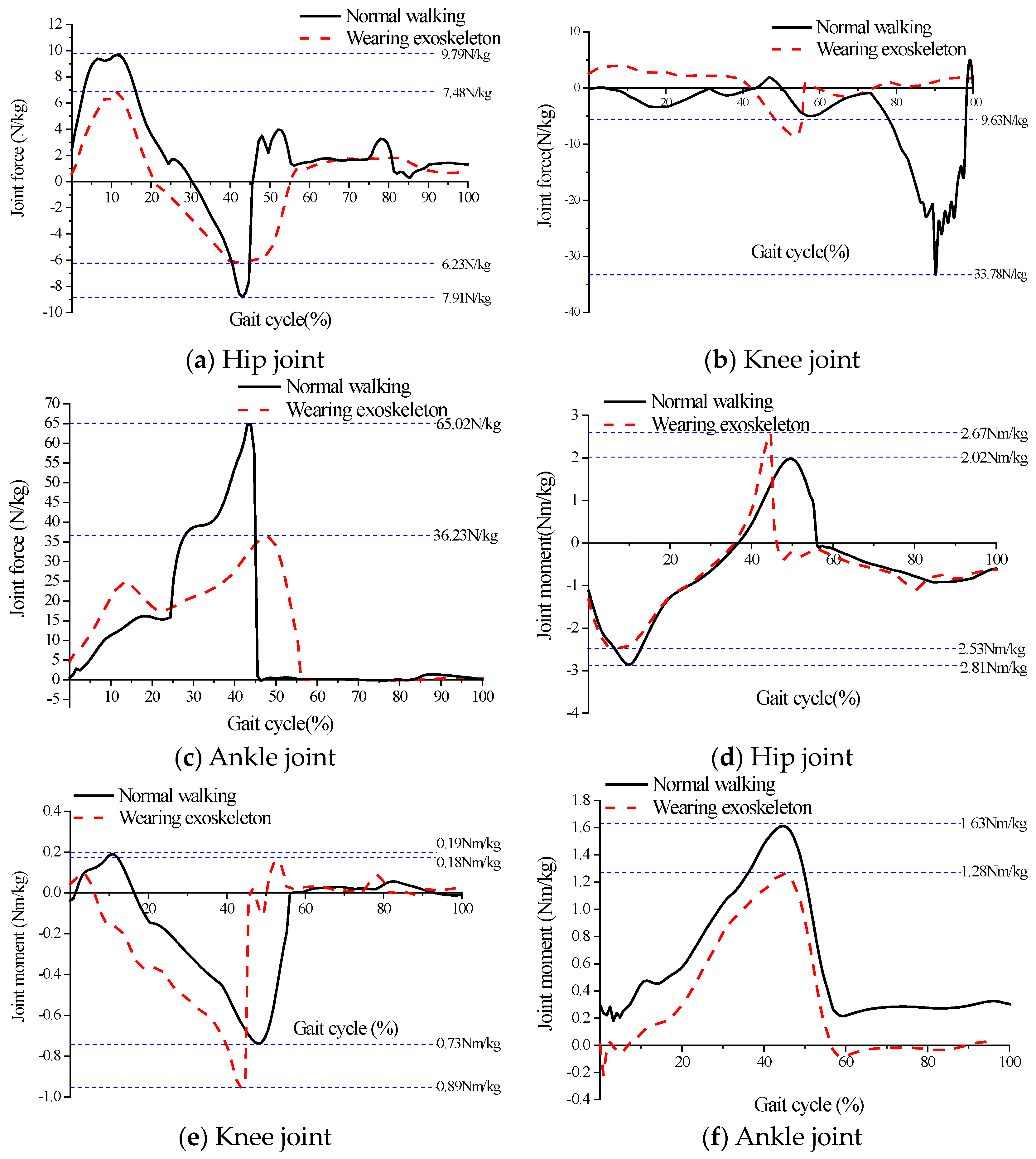
4.1.1. Joint Force Analysis
4.1.2. Joint Moment Analysis
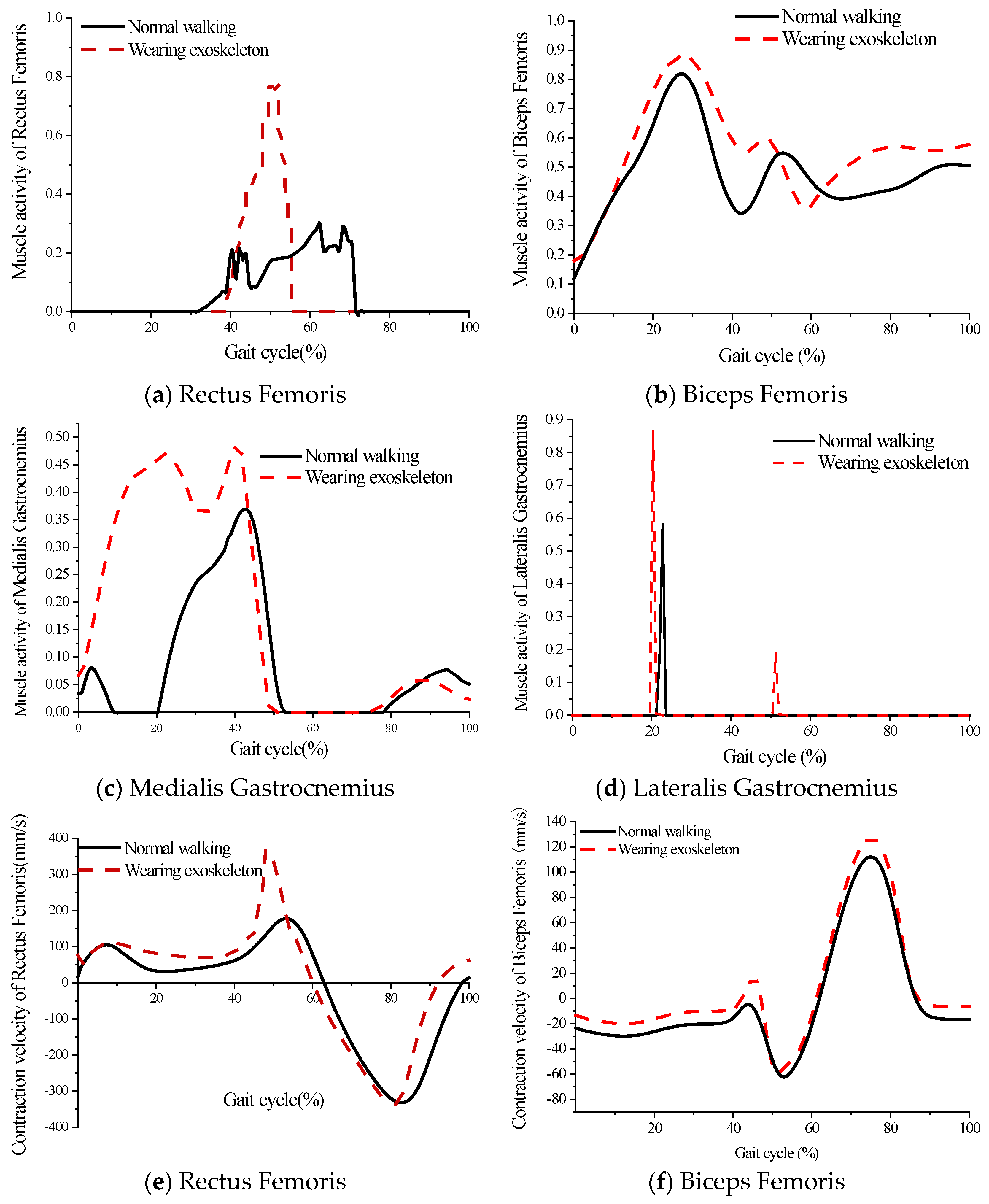
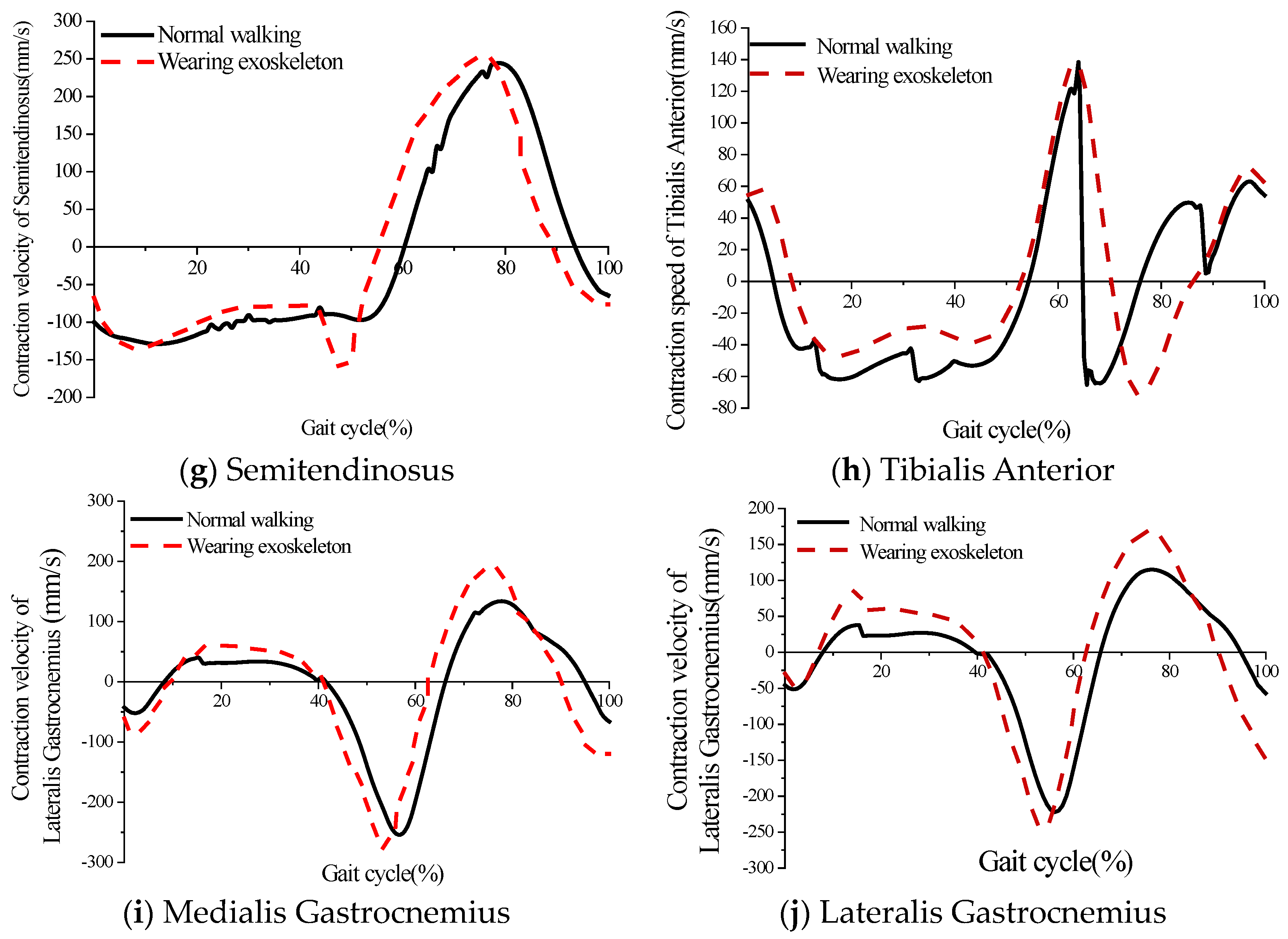
4.1.3. Biomechanical Parameters Analysis
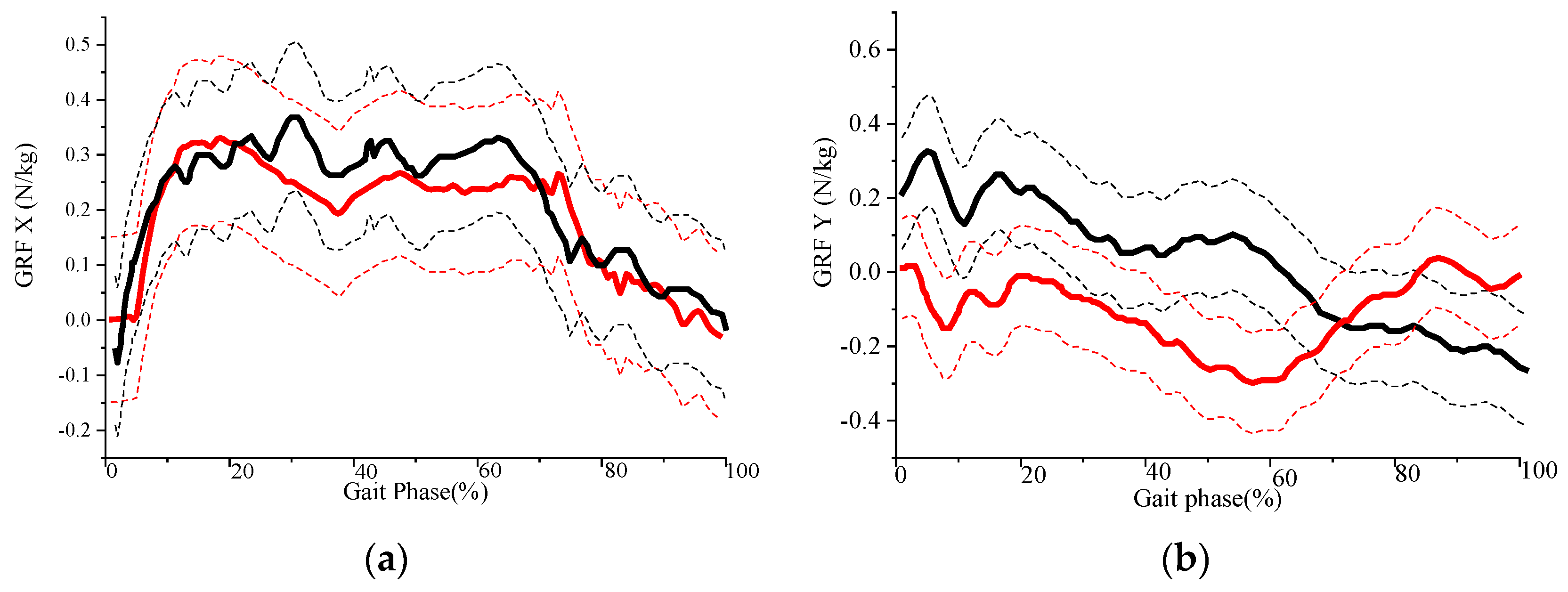
4.2. Comparison between the Human-Exoskeleton Model and the SSP Subjects-Exoskeleton Model
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- GBD 2019 Universal Health Coverage Collaborators. Measuring universal health coverage based on an index of effective coverage of health services in 204 countries and territories, 1990–2019: A systematic analysis for the Global Burden of Disease Study. Lancet 2020, 396, 1250–1284. [Google Scholar] [CrossRef] [PubMed]
- GBD 2019 Risk Factors Collaborators. Global burden of 87 risk factors in 204 countries and territories, 1990–2019: A systematic analysis for the Global Burden of Disease Study 2019. Lancet 2020, 396, 1223–1249. [Google Scholar] [CrossRef] [PubMed]
- GBD 20191 Demographics Collaborators. Global age-sex-specific fertility, mortality, healthy life expectancy, and population estimates in 204 countries and territories, 1950–2019: A comprehensive demographic analysis for the Global Burden of Disease Study 2019. Lancet 2020, 396, 1160–1203. [Google Scholar] [CrossRef]
- Wu, S.; Wu, B.; Liu, M.; Chen, Z.; Wang, W.; Anderson, C.S.; Sandercock, P.; Wang, Y.; Huang, Y.; Cui, L.; et al. Stroke in China: Advances and challenges in epidemiology, prevention, and management. Lancet Neurol. 2019, 18, 394–405. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Jiang, Y.; Li, H.; Xian, Y.; Wang, Y. China’s response to the rising stroke burden. Br. Med. J. 2019, 364, l879. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, C.; Ogata, T.; Zhong, Z.; Kanai-Pak, M.; Maeda, J.; Kitajima, Y.; Nakamura, M.; Kuwahara, N.; Ota, J. Development of Robot Patient Lower Limbs to Reproduce the Sit-to-Stand Movement with Correct and Incorrect Applications of Transfer Skills by Nurses. Appl. Sci. 2021, 18, 2872. [Google Scholar] [CrossRef]
- Torricelli, C.D.; De Marchis, A.; d’Avella, D.N.; Tobaruela, F.; Barroso, J.P. The effects of Lokomat lower gait training rehabilitation robot on lower limb function in hemiplegic stroke patients. Front. Bioeng. Biotechnol. 2020, 40, 1558–1560. [Google Scholar]
- Geenough, W.T.; Anderson, B.J. Cerebellar synaptic plasticity: Relation to learning versus neural activity. Ann Noy Acad Sci. 1991, 6, 231–247. [Google Scholar] [CrossRef]
- Langhorne, P.; Ramachandra, S. Organised inpatient (stroke unit) care for stroke: Network meta-analysis. Cochrane Database Syst. Rev. 2020, 4, CD000197. [Google Scholar] [CrossRef]
- Yang, C.; Chen, Y.; Lu, Y. Exploration on the theory and application of man machine integrated intelligent system. J. Mech. Eng. 2020, 36, 42–47. [Google Scholar] [CrossRef]
- Kong, Y.K.; Choi, K.H.; Cho, M.U.; Kim, S.Y.; Kim, M.J.; Shim, J.W.; Park, S.S.; Kim, K.R.; Seo, M.T.; Chae, H.S.; et al. Ergonomic Assessment of a Lower-Limb Exoskeleton through Electromyography and Anybody Modeling System. Int. J. Environ. Res. Public Health 2022, 19, 8088. [Google Scholar] [CrossRef]
- Park, S.; Caldwell, G.E.; Umberger, B.R. A direct collocation framework for optimal control simulation of pedaling using Open-Sim. PLoS ONE 2022, 17, e0264346. [Google Scholar]
- Ferrati, F.; Bortoletto, R.; Pagello, E. Virtual Modelling of a Real Exoskeleton Constrained to a Human Musculoskeletal Model. In Proceedings of the Biomimetic and Biohybrid Systems: Second International Conference, Living Machines 2013, London, UK, 29 July 29–2 August 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 96–107. [Google Scholar] [CrossRef]
- Zhu, Y.; Cui, J.; Zhao, J. Biomimetic Design and Biomechanical Simulation of a 15-DOF Lower Extremity Exoskeleton. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; pp. 1119–1124. [Google Scholar] [CrossRef]
- Stambolian, D.; Eltoukhy, M. Development and validation of a three-dimensional dynamic biomechanical lifting model for lower back evaluation for careful box placement. Int. J. Ind. Ergon. 2016, 54, 10–18. [Google Scholar] [CrossRef]
- Agarwal, P.; Kuo, P.-H.; Neptune, R.R.; Deshpande, A.D. A novel framework for virtual prototyping of rehabilitation exoskeletons. In Proceedings of the 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 24–26 June 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Agarwal, P.; Narayanan, M.S.; Lee, L.F.; Mendel, F.; Krovi, V.N. Simulation-based design of exoskeletons using musculo-skeletal analysis. Gait Posture 2017, 6, 1357–1364. [Google Scholar]
- Guan, X.; Ji, L.; Wang, R.; Huang, W. Optimization of an unpowered energy-stored exoskeleton for patients with spinal cord injury. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 5030–5033. [Google Scholar] [CrossRef]
- Liao, Y.; Wang, C.; Wu, X.; Lu, F.; Wang, P.; Cai, S. On the Mechanical Design and Control of a Self-Adaptive Exoskeleton Chair. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 937–942. [Google Scholar] [CrossRef]
- Pan, D.; Gao, F.; Miao, Y.; Cao, R. Co-simulation research of a novel exoskeleton-human robot system on humanoid gaits with fuzzy-PID/PID algorithms. Adv. Eng. Softw 2015, 79, 36–46. [Google Scholar] [CrossRef]
- Li, Y.; Guan, X.; Tong, Y.; Xu, C. Design and Simulation Study of the Translational-knee Lower Extremity Exoskeleton. Mechanika 2015, 21, 207–213. [Google Scholar] [CrossRef] [Green Version]
- Shourijeh, M.S.; Jung, M.; Ko, S.-T.; McGrath, M.; Stech, N.; Damsgaard, M. Simulating Physiological Discomfort of Exoskeletons Using Musculoskeletal Modelling. Gait Posture 2017, 57, 83–84. [Google Scholar] [CrossRef]
- Jamari, J.; Ammarullah, M.I.; Santoso, G.; Sugiharto, S.; Supriyono, T.; van der Heide, E. In Silico Contact Pressure of Metal-on-Metal Total Hip Implant with Different Materials Subjected to Gait Loading. Metals 2022, 12, 1241. [Google Scholar] [CrossRef]
- Jamari, J.; Ammarullah, M.I.; Santoso, G.; Sugiharto, S.; Supriyono, T.; Prakoso, A.T.; Basri, H.; van der Heide, E. Computational Contact Pressure Prediction of CoCrMo, SS 316L and Ti6Al4V Femoral Head against UHMWPE Acetabular Cup under Gait Cycle. J. Funct. Biomater. 2022, 13, 64. [Google Scholar] [CrossRef]
- Jamari, J.; Ammarullah, M.I.; Santoso, G.; Sugiharto, S.; Supriyono, T.; Permana, M.S.; Winarni, T.I.; van der Heide, E. Adopted walking condition for computational simulation approach on bearing of hip joint prosthesis: Review over the past 30 years. Heliyon 2022, 8, e12050. [Google Scholar] [CrossRef]
- Geonea, I.; Copilusi, C.; Margine, A.; Dumitru, S.; Rosca, A.; Tarnita, D. Dynamic Analysis and Structural Optimization of a New Exoskeleton Prototype for Lower Limb Rehabilitation. In Proceedings of the International Workshop on Medical and Service Robots, Craiova, Romania, 7–10 June 2023; Springer Nature: Cham, Switzerland, 2023; pp. 168–178. [Google Scholar]
- Vatsal, V.; Purushothaman, B. Biomechanical Design Optimization of Passive Exoskeletons through Surrogate Modeling on In-dustrial Activity Data. In Proceedings of the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Kyoto, Japan, 23–27 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 12752–12757. [Google Scholar]
- Dengiz, F.O. Research and Development on Mobile Powered Upper-Body Exoskeletons for Industrial Usage. In Proceedings of the 2022 21st International Symposium INFOTEH-JAHORINA (INFOTEH), East Sarajevo, Bosnia and Herzegovina, 16–18 March 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Ji, Z. Biomechanical characteristics of lower limbs in Taijiquan training simulated and verified by AnyBody. Chin. J. Rehabil. Med. 2014, 66, 799–805. [Google Scholar]
- Shan, L.; Hu, Z. Analysis of muscle strength of hip joint rehabilitation training based on AnyBody. J. Dalian Jiaotong Univ. 2019, 78, 52–55. [Google Scholar]
- Xiang, Z. Training effect simulation of an exoskeleton rehabilitation robot. J. Tianjin Univ. 2016, 135, 698–701. [Google Scholar]
- Wen, S. The Crouch Start Modeling and Simulation Based on AnyBody Technology. Int. J. Digit. Content Technol. Appl. 2010, 4, 8–14. [Google Scholar] [CrossRef]
- Jamari, J.; Ammarullah, M.I.; Saad, A.P.M.; Syahrom, A.; Uddin, M.; van der Heide, E.; Basri, H. The Effect of Bottom Profile Dimples on the Femoral Head on Wear in Metal-on-Metal Total Hip Arthroplasty. J. Funct. Biomater. 2021, 12, 38. [Google Scholar] [CrossRef]
- Mughal, K.; Mughal, M.P.; Farooq, M.U.; Anwar, S.; Ammarullah, M.I. Using Nano-Fluids Minimum Quantity Lubrication (NF-MQL) to Improve Tool Wear Characteristics for Efficient Machining of CFRP/Ti6Al4V Aeronautical Structural Composite. Processes 2023, 11, 1540. [Google Scholar] [CrossRef]
- Tauviqirrahman, M.; Jamari, J.; Susilowati, S.; Pujiastuti, C.; Setiyana, B.; Pasaribu, A.H.; Ammarullah, M.I. Performance Comparison of Newtonian and Non-Newtonian Fluid on a Heterogeneous Slip/No-Slip Journal Bearing System Based on CFD-FSI Method. Fluids 2022, 7, 225. [Google Scholar] [CrossRef]
- Lamura, M.D.P.; Hidayat, T.; Ammarullah, M.I.; Bayuseno, A.P.; Jamari, J. Study of contact mechanics between two brass solids in various diameter ratios and friction coefficient. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2023. [Google Scholar] [CrossRef]
- Lamura, M.D.P.; Ammarullah, M.I.; Hidayat, T.; Maula, M.I.; Jamari, J.; Bayuseno, A.P. Diameter ratio and friction coefficient effect on equivalent plastic strain (PEEQ) during contact between two brass solids. Cogent Eng. 2023, 5, 21. [Google Scholar] [CrossRef]
- Salaha, Z.F.M.; Ammarullah, M.I.; Abdullah, N.N.A.A.; Aziz, A.U.A.; Gan, H.-S.; Abdullah, A.H.; Kadir, M.R.A.; Ramlee, M.H. Biomechanical Effects of the Porous Structure of Gyroid and Voronoi Hip Implants: A Finite Element Analysis Using an Experimentally Validated Model. Materials 2023, 16, 3298. [Google Scholar] [CrossRef]
- Ammarullah, M.I.; Hartono, R.; Supriyono, T.; Santoso, G.; Sugiharto, S.; Permana, M.S. Polycrystalline Diamond as a Potential Material for the Hard-on-Hard Bearing of Total Hip Prosthesis: Von Mises Stress Analysis. Biomedicines 2023, 11, 951. [Google Scholar] [CrossRef]
- Tauviqirrahman, M.; Ammarullah, M.I.; Jamari, J.; Saputra, E.; Winarni, T.I.; Kurniawan, F.D.; Shiddiq, S.A.; van der Heide, E. Analysis of contact pressure in a 3D model of dual-mobility hip joint prosthesis under a gait cycle. Sci. Rep. 2023, 13, 1–11. [Google Scholar] [CrossRef]
- Ammarullah, M.I.; Afif, I.Y.; Maula, M.I.; Winarni, T.I.; Tauviqirrahman, M.; Akbar, I.; Basri, H.; van der Heide, E.; Jamari, J. Tresca Stress Simulation of Metal-on-Metal Total Hip Arthroplasty during Normal Walking Activity. Materials 2021, 14, 7554. [Google Scholar] [CrossRef]
- Ammarullah, M.I.; Santoso, G.; Sugiharto, S.; Supriyono, T.; Wibowo, D.B.; Kurdi, O.; Tauviqirrahman, M.; Jamari, J. Minimizing Risk of Failure from Ceramic-on-Ceramic Total Hip Prosthesis by Selecting Ceramic Materials Based on Tresca Stress. Sustainability 2022, 14, 13413. [Google Scholar] [CrossRef]
- Ammarullah, M.I.; Santoso, G.; Sugiharto, S.; Supriyono, T.; Kurdi, O.; Tauviqirrahman, M.; Winarni, T.I.; Jamari, J. Tresca stress study of CoCrMo-on-CoCrMo bearings based on body mass index using 2D computational model. J. Tribol. 2022, 33, 31–38. Available online: https://jurnaltribologi.mytribos.org/v33/JT-33-31-38.pdf (accessed on 9 July 2023).
- Meinel, T.R.; Branca, M.; De Marchis, G.M.; Nedeltchev, K.; Kahles, T.; Bonati, L.; Arnold, M.; Heldner, M.R.; Jung, S.; Carrera, E.; et al. Prior anticoagulation in patients with ischemic stroke and atrial fibrillation. Ann. Neurol. 2021, 89, 42–53. [Google Scholar] [CrossRef]
- Saini, V.; Guada, L.; Yavagal, D.R. Global epidemiology of stroke and access to acute ischemic stroke interventions. Neurology 2021, 97 (Suppl. 2), S6–S16. [Google Scholar] [CrossRef]
- Ebinger, M.; Siegerink, B.; Kunz, A.; Wendt, M.; Weber, J.E.; Schwabauer, E.; Geisler, F.; Freitag, E.; Lange, J.; Behrens, J.; et al. Association between dispatch of mobile stroke units and functional outcomes among patients with acute ischemic stroke in Berlin. Jama 2021, 325, 454–466. [Google Scholar] [CrossRef]
- Baratta, R.V.; Solomonow, M.; Nguyen, G. Characterization of load-length-velocity relationships of nine different skeletal mus-cles. J. Biomech. 2000, 33, 381–385. [Google Scholar] [CrossRef]
- Zhang, J.; Cai, Y.; Dou, S. Study on plantar pressure and sEMG parameters of stair walking. Med. Biome-Chanics 2018, 33, 42–47. [Google Scholar]
- Fluit, R.; Andersen, M.; Kolk, S.; Verdonschot, N.; Koopman, H. Prediction of ground reaction forces and moments during various activities of daily living. J. Biomech. 2014, 47, 2321–2329. [Google Scholar] [CrossRef] [PubMed]
- Jung, Y.; Jung, M.; Ryu, J.; Yoon, S.; Park, S.-K.; Koo, S. Dynamically adjustable foot-ground contact model to estimate ground reaction force during walking and running. Gait Posture 2016, 45, 62–68. [Google Scholar] [CrossRef] [PubMed]
- Fournier, B.N.; Lemaire, E.D.; Smith, A.J.; Doumit, M. Modelling and Simulation of a Lower limb Powered Exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1596–1603. [Google Scholar] [CrossRef]
- Ding, C.; Wang, J.; Gao, Z. Reverse dynamics simulation of human leg in automobile driving based on Anybody. Chin. J. Biomed. Eng. 2018, 32, 124–128. [Google Scholar]
- Hatze, H. Estimation of myodynamic parameter values from observations on isometrically contracting muscle groups. Eur. J. Appl. Physiol. 1981, 46, 325–338. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Material | Mass/Kg |
|---|---|---|
| Back support | Carbon fiber | 1.2 |
| Hip joint component | High strength aluminum alloy | 1.5 |
| Knee joint component | High strength aluminum alloy | 1.2 |
| Ankle joint component | High strength aluminum alloy | 1.2 |
| Brace of thigh | Carbon fiber | 2.4 |
| Brace of calf | Carbon fiber | 2.4 |
| Power Components | Specification | Hip Joint | Knee Joint |
|---|---|---|---|
| Motor | Rated output (W) | 750 | 400 |
| Rated torque (N-m) | 2.4 | 1.3 | |
| Ball Screws | Stroke range (mm) | 100 | 100 |
| Maximum dynamic load (N) | 4000 | 2000 |
| Model | GRF X | GRF Y | GRF Z | COP X | COP Y | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| R | RMSE | R | RMSE | R | RMSE | R | RMSE | R | RMSE | |
| Human-exoskeleton model | 0.795 (0.08) | 0.193 (0.06) | 0.857 (0.07) | 0.255 (0.06) | 0.974 (0.02) | 0.553 (0.23) | 0.325 (0.28) | 1.714 (0.36) | 0.743 (0.17) | 4.245 (3.04) |
| SSP subject-exoskeleton model | 0.478 (0.18) | 0.276 (0.06) | 0.536 (0.22) | 0.381 (0.08) | 0.943 (0.11) | 0.988 (0.47) | 0.135 (0.28) | 4.736 (3.86) | 0.398 (0.42) | 6.179 (2.63) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, L.; Zhang, J.; Zhang, P.; Fang, D. Research on the Influence of Exoskeletons on Human Characteristics by Modeling and Simulation Using the AnyBody Modeling System. Appl. Sci. 2023, 13, 8184. https://doi.org/10.3390/app13148184
Cao L, Zhang J, Zhang P, Fang D. Research on the Influence of Exoskeletons on Human Characteristics by Modeling and Simulation Using the AnyBody Modeling System. Applied Sciences. 2023; 13(14):8184. https://doi.org/10.3390/app13148184
Chicago/Turabian StyleCao, Lin, Junxia Zhang, Peng Zhang, and Delei Fang. 2023. "Research on the Influence of Exoskeletons on Human Characteristics by Modeling and Simulation Using the AnyBody Modeling System" Applied Sciences 13, no. 14: 8184. https://doi.org/10.3390/app13148184
APA StyleCao, L., Zhang, J., Zhang, P., & Fang, D. (2023). Research on the Influence of Exoskeletons on Human Characteristics by Modeling and Simulation Using the AnyBody Modeling System. Applied Sciences, 13(14), 8184. https://doi.org/10.3390/app13148184