
An Experimental Validated Control Strategy of Maglev Vehicle-Bridge Self-Excited Vibration

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
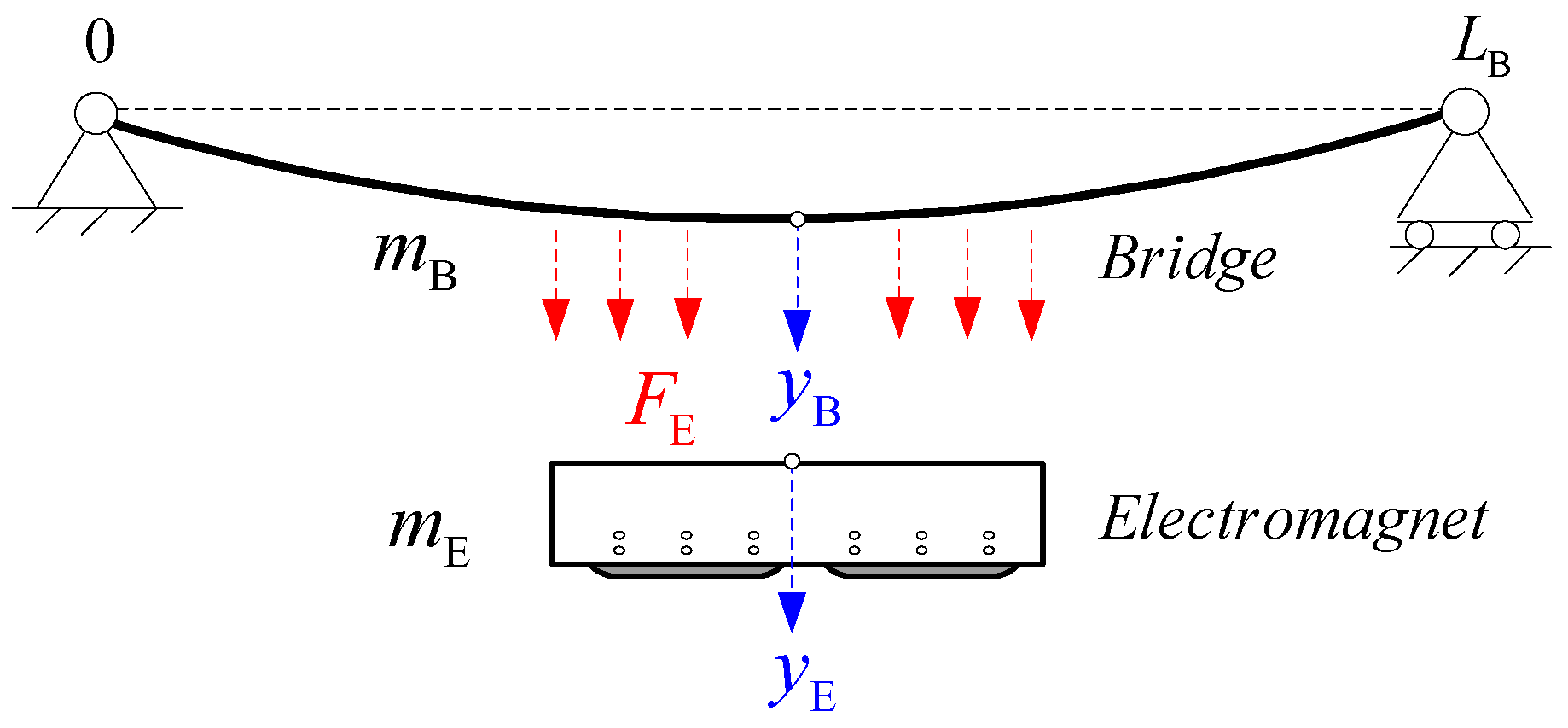
2. Modeling of Vehicle-Bridge Interaction
2.1. Modeling of Bridge
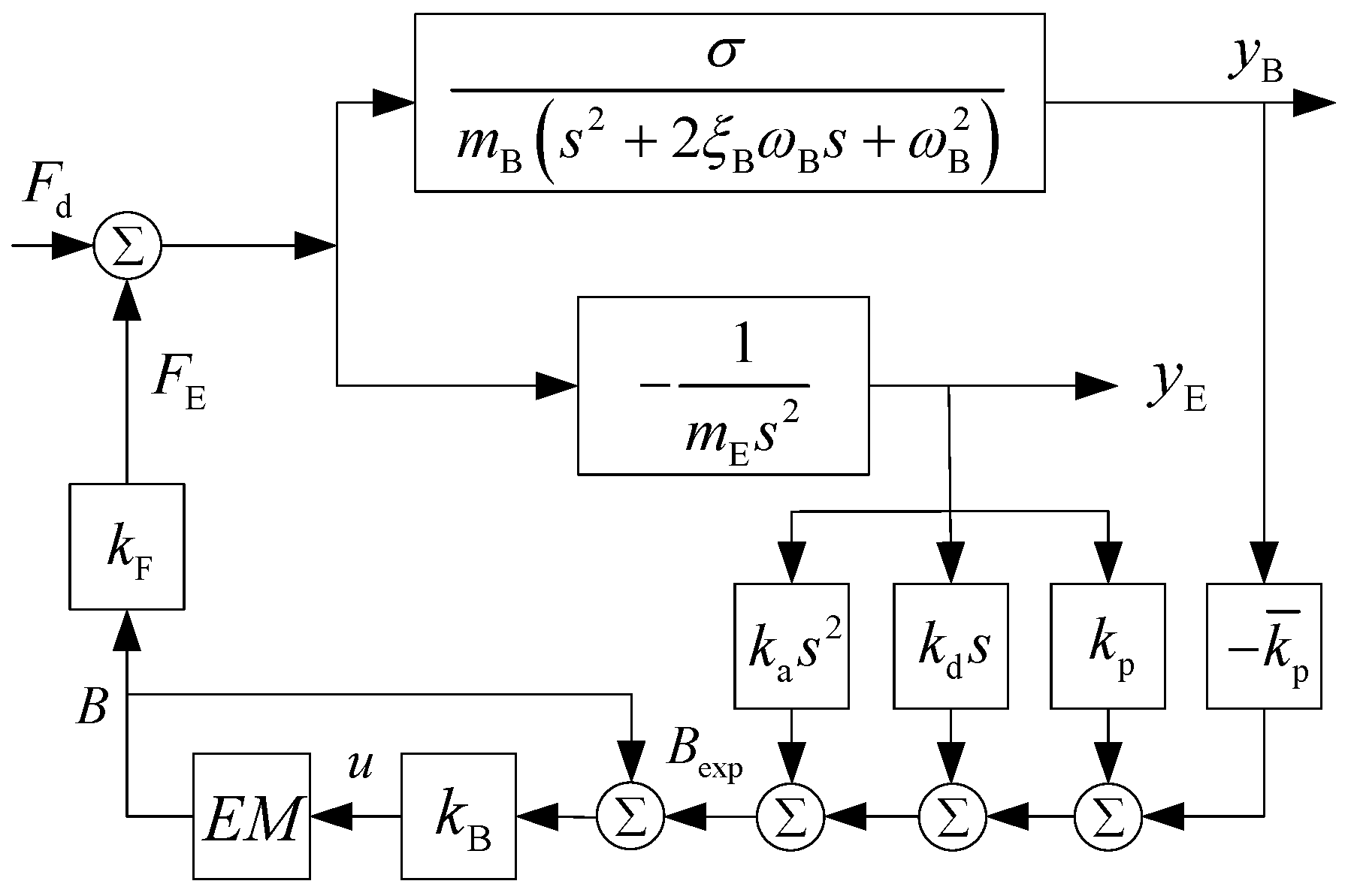
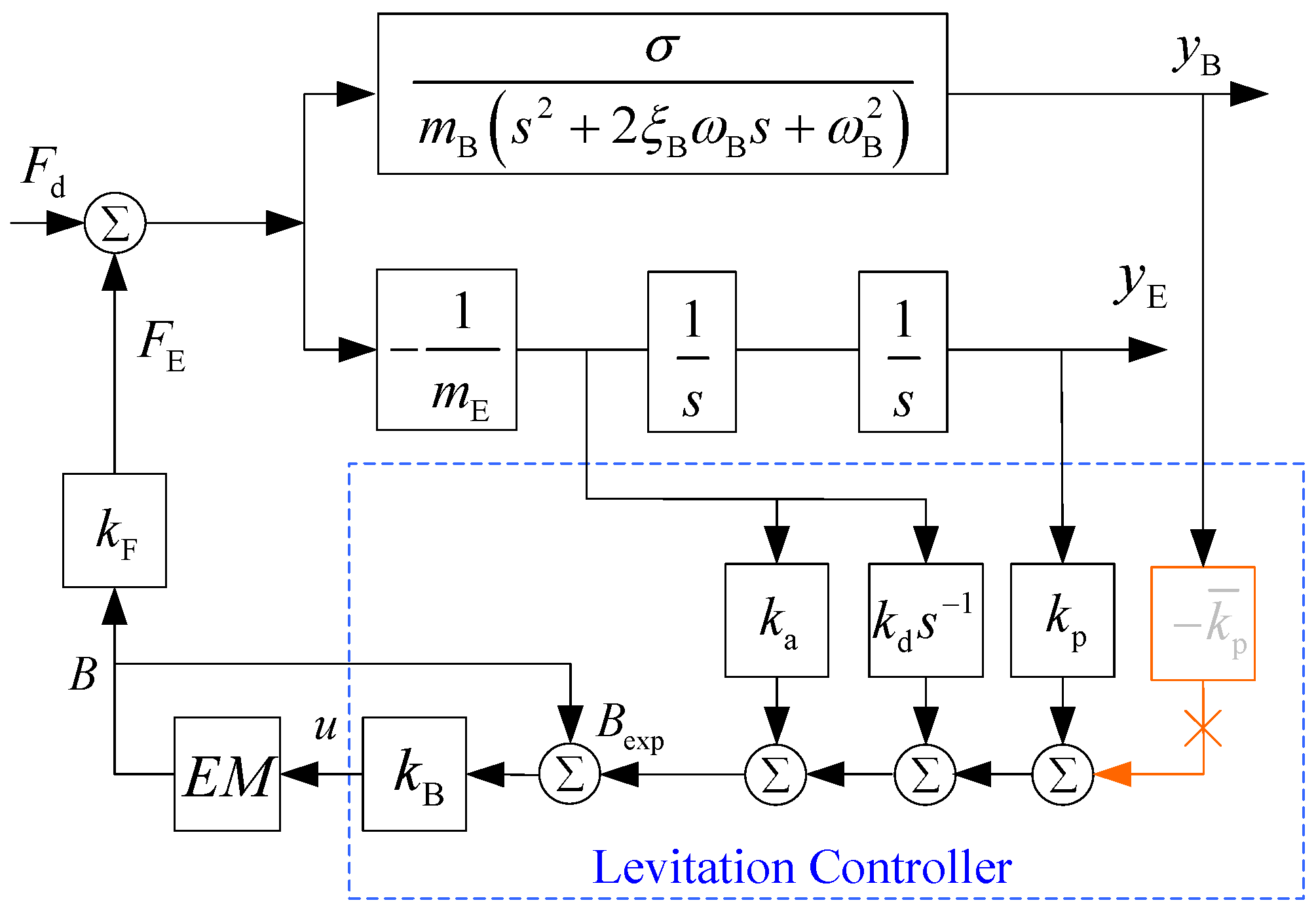
2.2. Modeling of Levitation System
3. Principle of Self-Excited Vibration
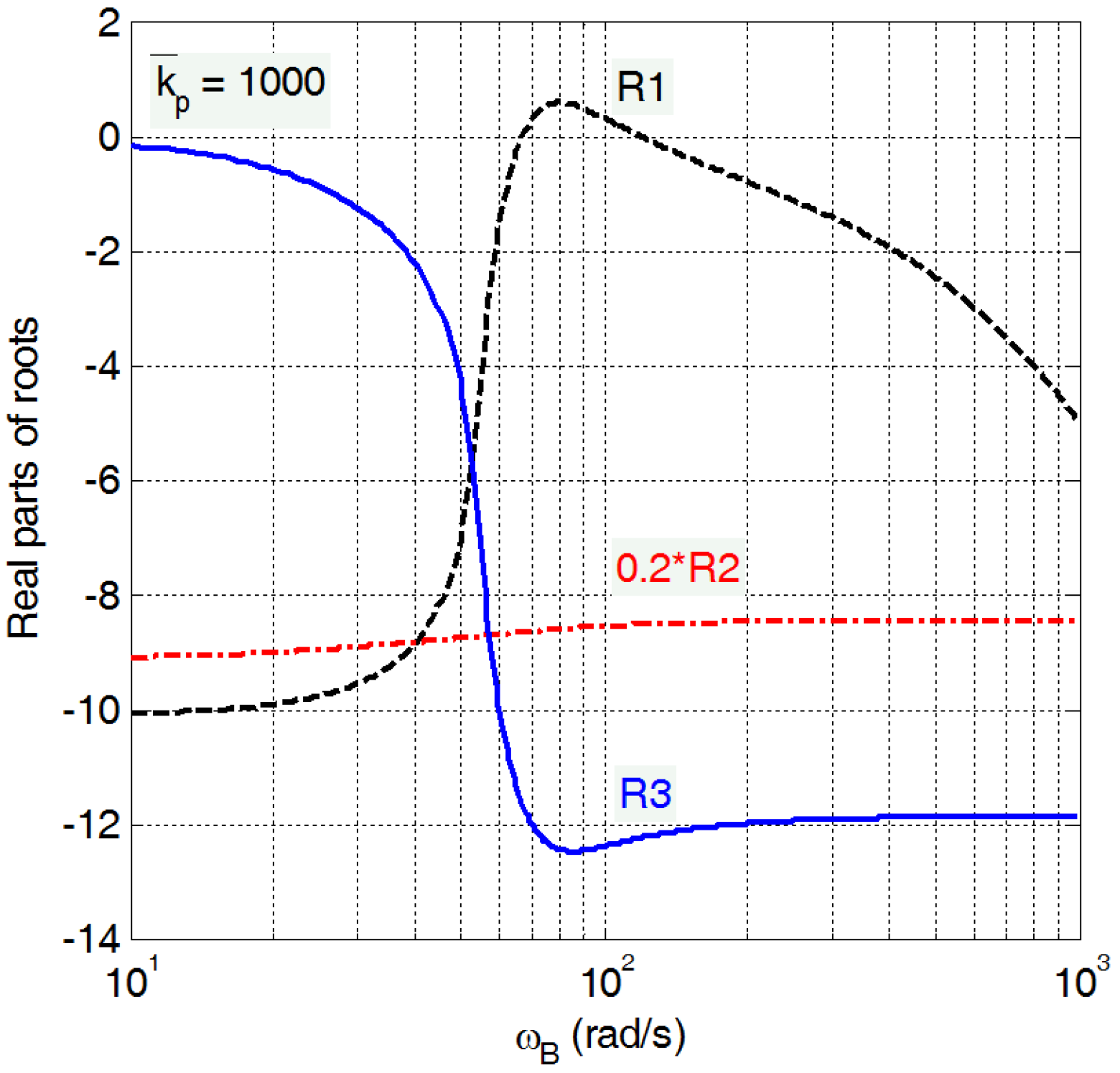
3.1. Stability of Levitation System
3.2. Stability of Vehicle-Bridge Interaction System
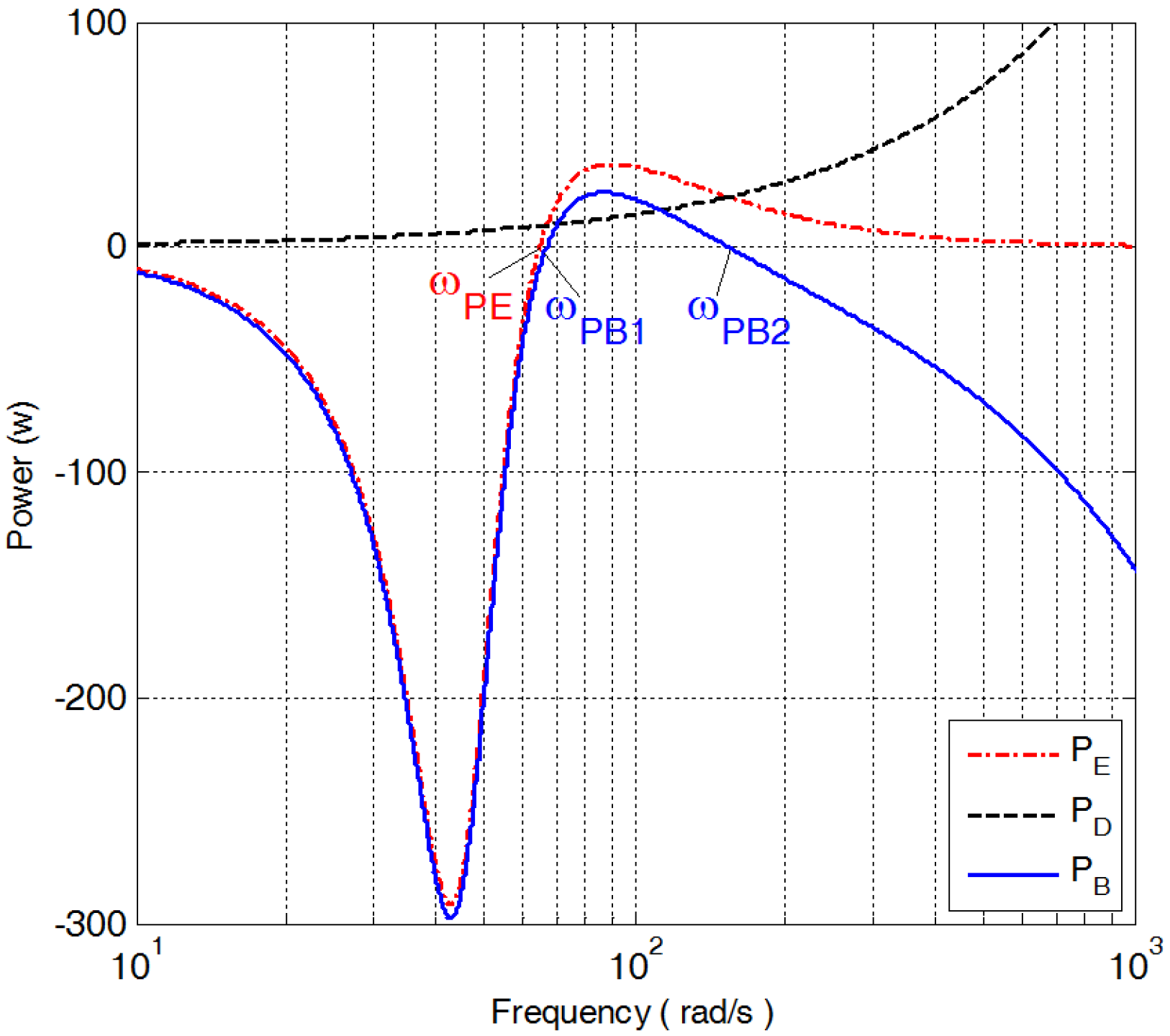
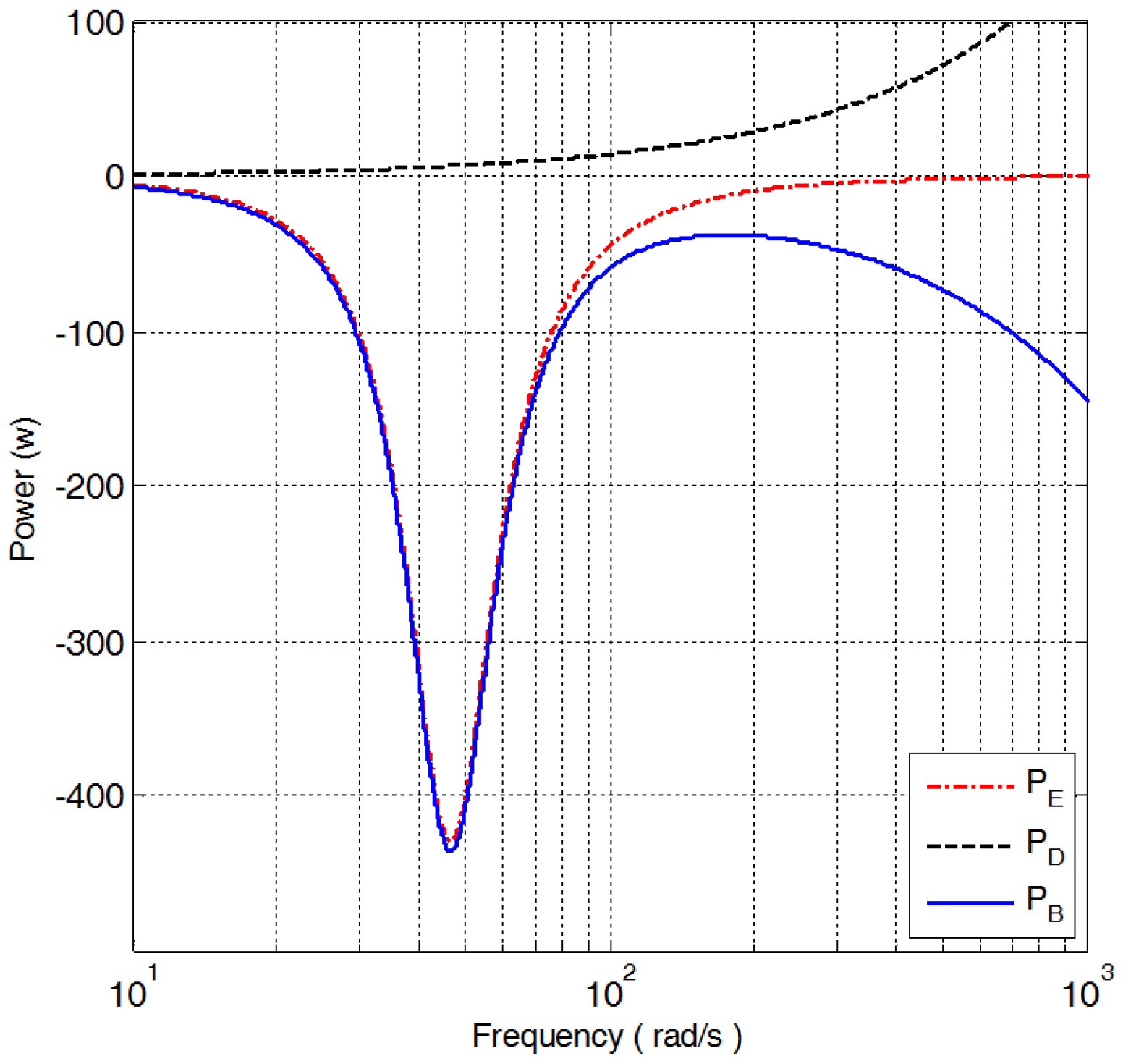
3.3. Principle of Self-Excited Vibration from the Perspective of Energy Interchange
4. Suppression Strategy of Self-Excited Vibration
4.1. Influence on Stability with Regard to
4.2. Energy Variation with Regard to
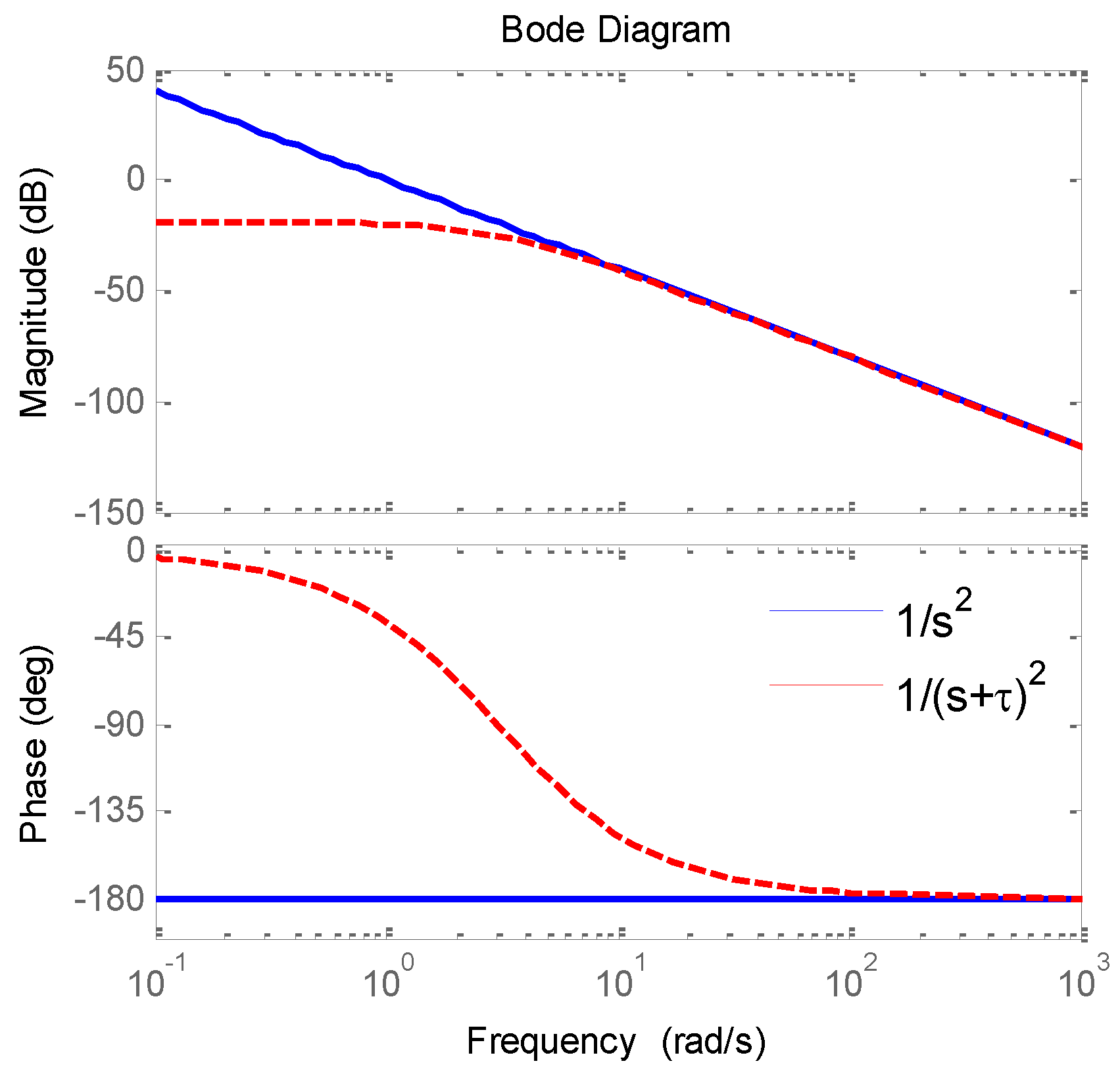
4.3. The Estimation of Electromagnet’s Displacement
5. Numerical and Experimental Validation
5.1. Numerical Validation
5.2. Experimental Validation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhou, H.B.; Duan, J.A. A novel levitation control strategy for a class of redundant actuation maglev system. Control Eng. Pract. 2011, 19, 1468–1478. [Google Scholar] [CrossRef]
- Huang, C.M.; Yen, J.Y.; Chen, M.S. Adaptive nonlinear control of repulsive maglev suspension systems. Control Eng. Pract. 2000, 8, 1357–1367. [Google Scholar] [CrossRef]
- Li, J.H.; Li, J. A practical robust nonlinear controller for maglev levitation system. J. Cent. South Univ. Technol. 2013, 20, 2991–3001. [Google Scholar] [CrossRef]
- Li, J.H.; Li, J.; Zhou, D.F.; Yu, P.C. Self-excited vibration problems of maglev vehicle-bridge interaction system. J. Cent. South Univ. Technol. 2014, 21, 4184–4192. [Google Scholar] [CrossRef]
- Zhou, D.F.; Li, J.; Hansen, C.H. Suppression of the stationary maglev vehicle-bridge coupled resonance using a tuned mass damper. J. Vib. Control 2013, 19, 191–203. [Google Scholar] [CrossRef]
- Li, J.H.; Li, J.; Yu, P.C.; Wang, L.C. Adaptive backstepping control for levitation system with load uncertainties and external disturbances. J. Cent. South Univ. Technol. 2014, 21, 4478–4488. [Google Scholar] [CrossRef]
- Glück, T.; Kemmetmüller, W.; Tump, C.; Kugi, A. A novel robust position estimator for self-sensing magnetic levitation systems based on least squares identification. Control Eng. Pract. 2011, 19, 146–157. [Google Scholar] [CrossRef]
- Zhang, W.Q.; Li, J.; Zhang, K.; Cui, P. Stability and bifurcation in magnetic flux feedback maglev control system. Math. Probl. Eng. 2013, 2013, 537359. [Google Scholar] [CrossRef]
- Albert, T.E.; Hanasoge, A.; Oleszczuk, G. Stable levitation control of magnetically suspended vehicles with structural flexibility. In Proceedings of the 2008 American Control Conference, Seattle, WA, USA, 11–13 June 2008.
- Albert, T.E.; Oleszczuk, G. On the influence of structural flexibility on feedback control system stability for EMS Maglev vehicles. Proceedings of the 19th International Conference on Magnetically Levitated Systems and Linear Drives.
- Wang, H.P.; Li, J. Vibration analysis of the maglev guideway with the moving load. J. Sound Vib. 2007, 305, 621–640. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, L. Hopf bifurcation of time-delayed feedback control for maglev system with flexible guideway. Appl. Math. Comput. 2013, 219, 6106–6112. [Google Scholar] [CrossRef]
- Wang, H.P.; Li, J.; Zhang, K. Sup-resonant response of a non-autonomous maglev system with delayed acceleration feedback control. IEEE Trans. Magn. 2008, 44, 2338–2350. [Google Scholar] [CrossRef]
- Zhou, D.F.; Hansen, C.H.; Li, J. Suppression of maglev vehicle-girder self-excited vibration using a virtual tuned mass damper. J. Sound Vib. 2011, 330, 883–901. [Google Scholar] [CrossRef]
- Li, J.H.; Li, J.; Zhou, D.F.; Wang, L.C. The modeling and analysis for the self-excited vibration of the maglev vehicle-bridge interaction system. Math. Probl. Eng. 2015, 2015, 709583. [Google Scholar] [CrossRef]
- Li, J.H.; Li, J.; Zhou, D.F.; Cui, P.; Wang, L.C.; Yu, P.C. The active control of maglev stationary self-excited vibration with a virtual energy harvester. IEEE Trans. Ind. Electron. 2015, 62, 2942–2951. [Google Scholar] [CrossRef]
- Yau, J.D. Vibration control of maglev vehicles traveling over a flexible guideway. J. Sound Vib. 2009, 321, 184–200. [Google Scholar] [CrossRef]
- Li, J.H.; Fang, D.; Zhang, D.; Cai, Y.; Ni, Q.; Li, J. A practical control strategy for the maglev self-excited resonance suppression. Math. Probl. Eng. 2016, 2016, 8071938. [Google Scholar] [CrossRef]













© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Li, J.; Zhou, D.; Li, J. An Experimental Validated Control Strategy of Maglev Vehicle-Bridge Self-Excited Vibration. Appl. Sci. 2017, 7, 38. https://doi.org/10.3390/app7010038
Wang L, Li J, Zhou D, Li J. An Experimental Validated Control Strategy of Maglev Vehicle-Bridge Self-Excited Vibration. Applied Sciences. 2017; 7(1):38. https://doi.org/10.3390/app7010038
Chicago/Turabian StyleWang, Lianchun, Jinhui Li, Danfeng Zhou, and Jie Li. 2017. "An Experimental Validated Control Strategy of Maglev Vehicle-Bridge Self-Excited Vibration" Applied Sciences 7, no. 1: 38. https://doi.org/10.3390/app7010038
APA StyleWang, L., Li, J., Zhou, D., & Li, J. (2017). An Experimental Validated Control Strategy of Maglev Vehicle-Bridge Self-Excited Vibration. Applied Sciences, 7(1), 38. https://doi.org/10.3390/app7010038