1. Introduction
Over the past decades, base isolation has been demonstrated to be an effective means to protect crucial structures and their contents from the destructive effects of dynamic excitations. The performance of base-isolated structures against near-fault earthquakes characterized by long-duration pulses with peak velocities has been investigated by several researchers [
1,
2]. Recent research results have shown that near-fault earthquakes characterized by long-duration pulses with peak velocities will result in significant base displacements and inter-story drifts of a seismically isolated structure [
3]. Kalkan and Kunnath [
4] showed that the fling-step effect would mainly excite the first order modal response of the structures with middle and long natural vibration period, and cause the maximum deformation of the structure at the bottom, which would result in the failure mode of the structure. Providakis [
5] pointed out that isolation bearings will have a large deformation when the base-isolated structures with long natural vibration period are subjected to pulse-type near-fault earthquakes. Yang [
6] examined the performance of a base-isolated structure under the action of near-fault earthquakes with fling-step effect. He found that the base displacement of the base-isolated structure exceeded the permissible displacement of the isolation bearings. The base-isolated structure may cause lateral instability, and the fling-step effect is more harmful than the rupture forward directivity for the base-isolated structure.
Due to the large isolator displacements, the isolated structure will suffer some serious problems, such as large permanent base displacement, failure of the isolation bearing and overturning of the superstructure [
7]. In addition, as a result of large isolator displacements, the size of the isolation device will significantly increase, which may require much larger seismic gaps between buildings or much larger bridge expansion joints. Therefore, these requirements increase the cost of the construction, which contradicts the primary goal of seismic isolation, which is to design structures more efficiently and economically [
8]. In order to enhance the performance of the base-isolated structures subjected to pulse-type near-fault excitations, many kinds of control devices have been proposed [
9,
10,
11]. Passive supplemental damping devices can reduce the deformations of the isolation bearings during strong ground motions. However, they may also induce large damper forces and result in increased floor accelerations [
12]. Furthermore, when the structure is subjected to weak or moderate earthquakes, passive devices may adversely affect the isolation system since the desired isolation characteristics may be different for these earthquakes.
Semi-active control is an effective control alternative that regulates the output power of dampers according to current structural responses. Therefore, semi-active control has better adaptability than traditional passive control. Furthermore, semi-active control requires less power compared to active control, which uses powerful actuators to achieve ideal effects. For these reasons, semi-active control devices have been receiving considerable attentions in recent years. Nagarajaiah and Sahasrabudhe [
13] proposed a variable stiffness device that is used in a sliding isolation system to reduce the seismic response of a base-isolated structure, and the effectiveness of the semi-active device was proved by numerical analytical and experimental studies. Shook et al. [
14] proposed a super elastic semi-active damping device in a base-isolated structure and its damping performance was thoroughly analyzed and evaluated. Madhekar and Jangid [
15] analyzed and evaluated the dynamic response of a seismically isolated benchmark bridge equipped with viscous and variable dampers, and assessed the performance of these dampers.
The goal of utilizing a semi-active device in a base-isolated structure is to mitigate the displacement response of the isolation system according to the current stage of excitation without an obvious increase in the superstructure response. In order to utilize the full capabilities of the semi-active devices employed in a semi-active isolation system, an effective control algorithm is essential. Due to the uncertainties in the nature of earthquakes and the characteristics of base-isolated systems, the task of developing an optimal controller is a challenging task. For instance, a controller designed for near-fault earthquakes that cause significant deformations in the isolation system might develop large damper forces during a far field earthquake of generally moderate excitation. As a result, the isolation system may not perform as expected, and a significant increase in the acceleration response of the superstructure may be observed. Alternatively, if the controller is designed for an earthquake with far-field characteristics, the damper force may not be large enough to effectively reduce the structural responses during the pulse-type ground motion. Thus, semi-active dampers need an adaptive control strategy for both far-field and near-field earthquakes.
Recently, fuzzy logic control has been shown to be a promising control algorithm and has been widely used by many researchers for the control of semi-active devices due to its superiority and effectiveness in dealing with complex, uncertain, and nonlinear systems [
16]. Das et al. [
17] studied the fuzzy control for seismic protection of civil structures using MR dampers. Kim and Roschke [
18] adopted the supervisory fuzzy control technique in a similar manner to MR dampers in order to reduce seismic response of a base-isolated benchmark building. Ozbulut and Stefan [
19] developed a supervisory fuzzy logic controller and a GA-based self-organizing fuzzy logic controller for piezoelectric friction dampers that are employed as semi-active devices in the base-isolated structure. An adaptive fuzzy neural control strategy was also developed by Ozbulut et al. [
20] to adjust the contact force of the variable friction dampers (VFDs) that are used in a smart isolation system. In addition, Zhao and Li [
21] proposed a new fuzzy logic controller that is designed for seismic protection of base-isolated structures utilizing piezoelectric friction damper against near-fault earthquakes for different ground sites.
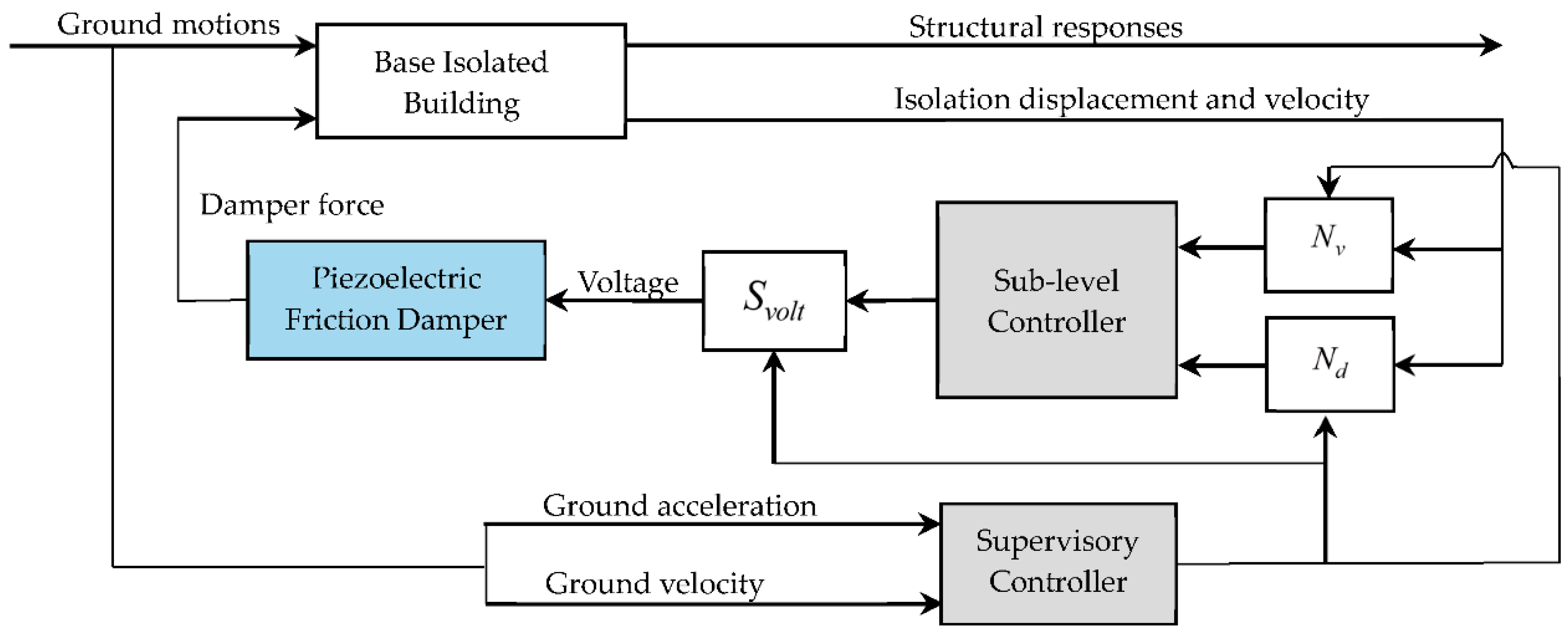
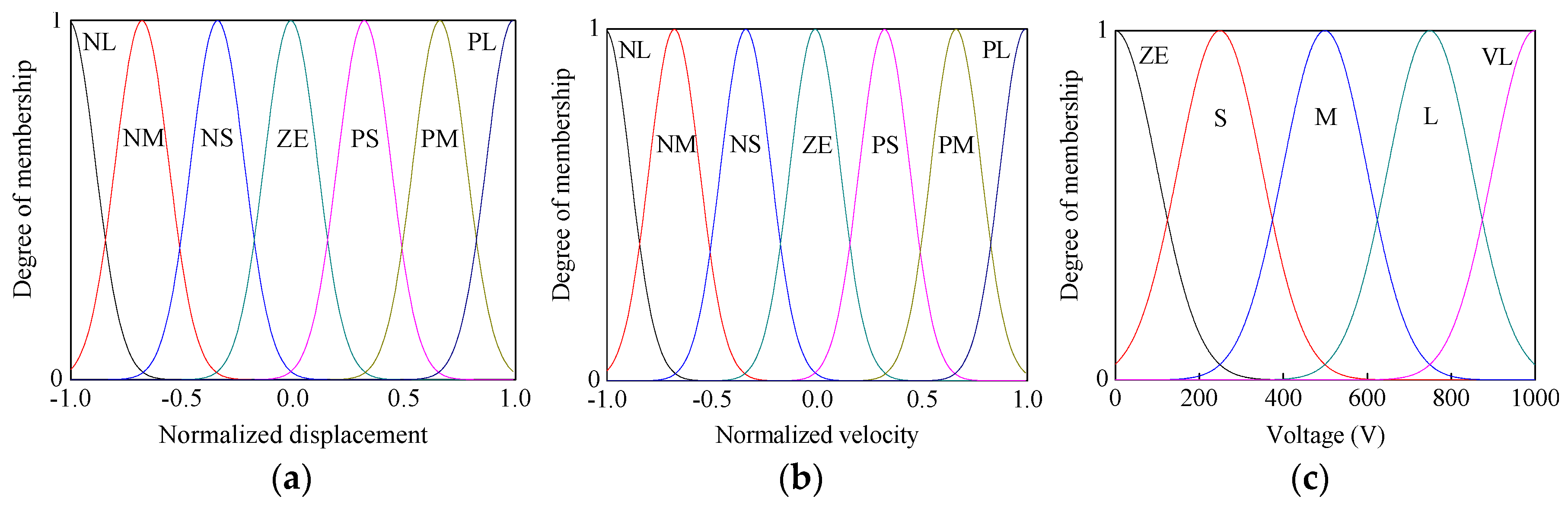
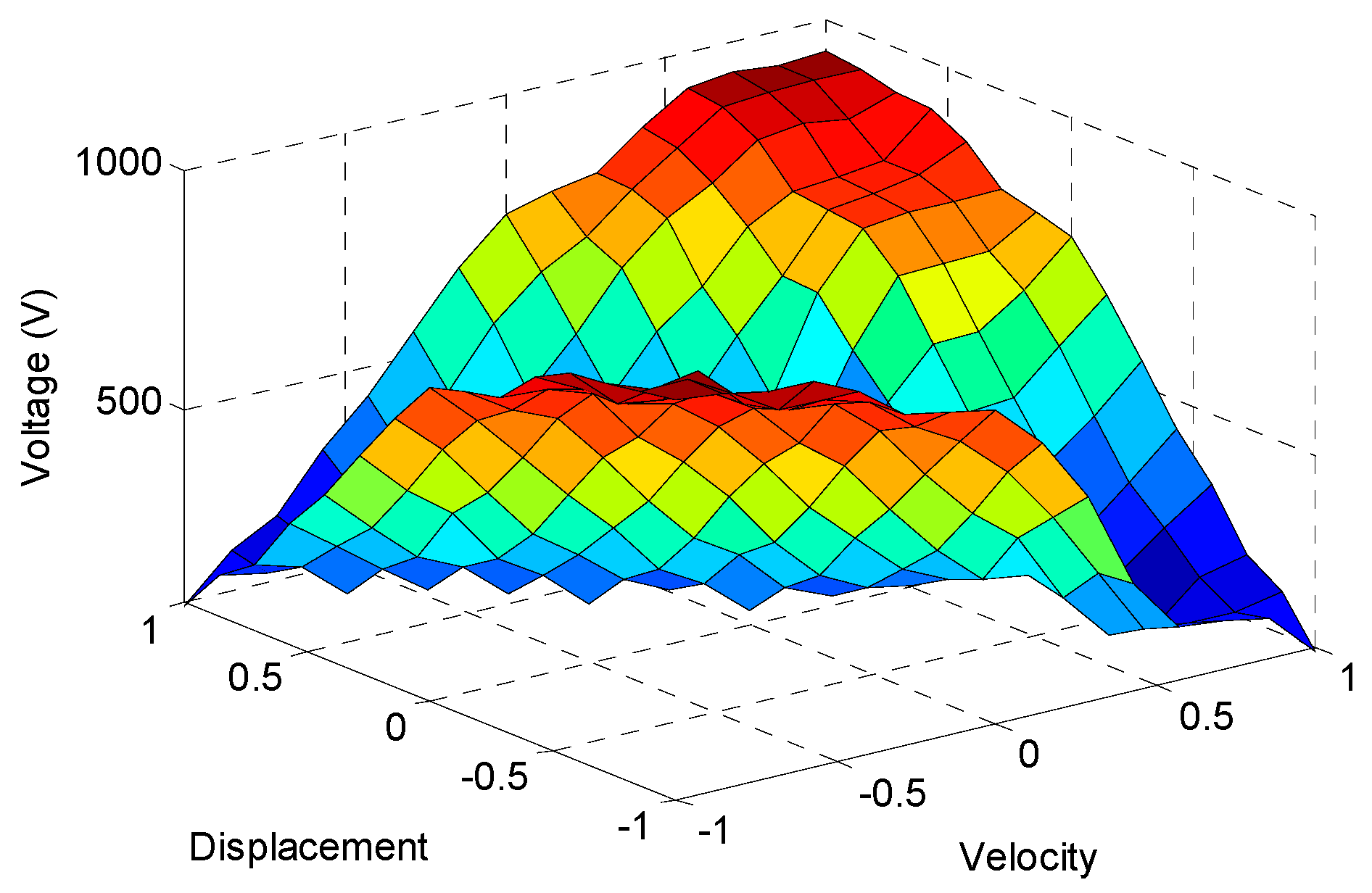
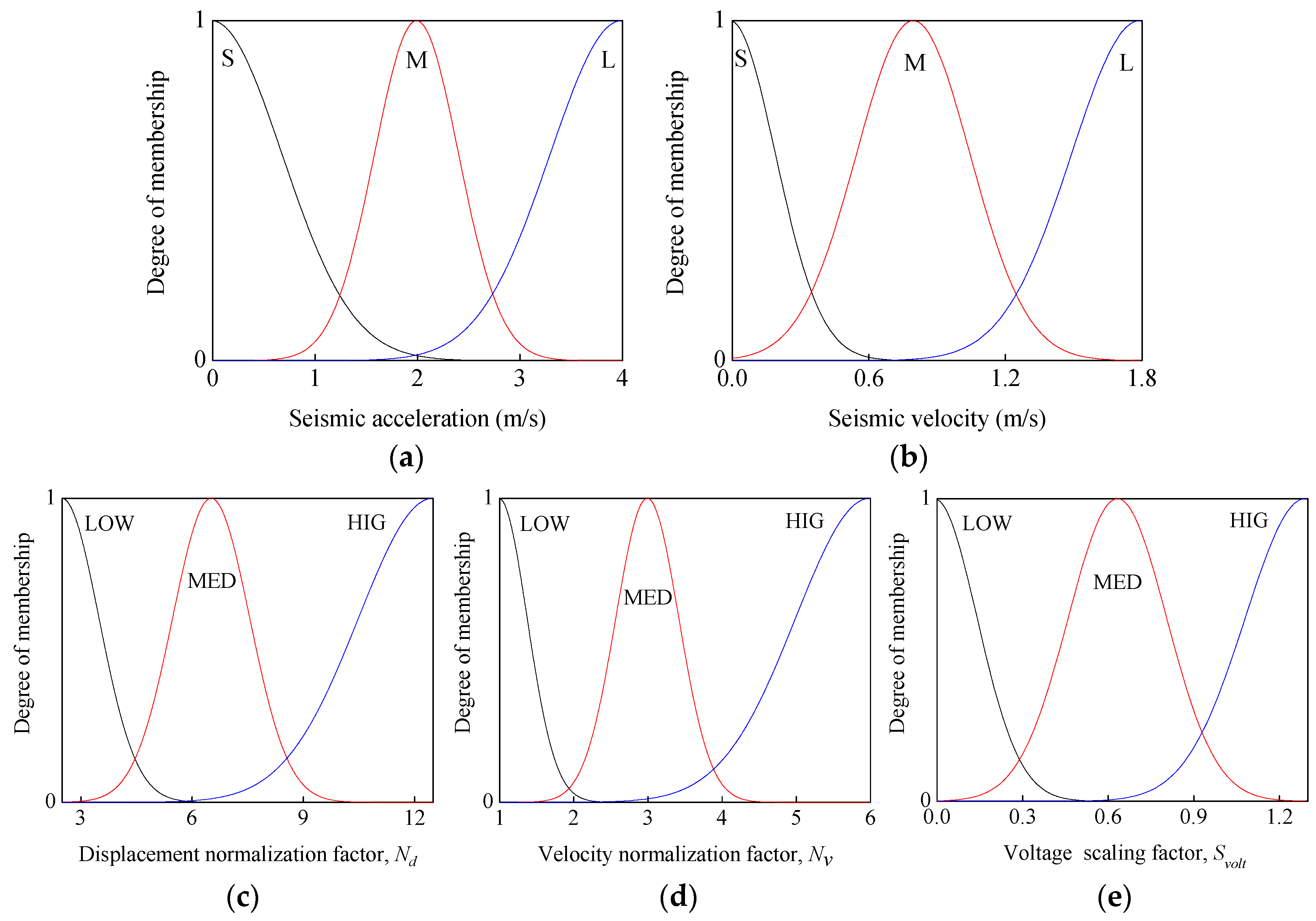
In this study, an improved self-tuning fuzzy logic control strategy is proposed in order to adjust the contact force of the piezoelectric friction damper (PFD) that is used in a smart isolation system. The control strategy employs an intelligent upper-level supervisory controller and a sub-level knowledge-based fuzzy controller. In this control strategy, the supervisory controller provides a mechanism to identify the nature of the earthquake, while the sub-level fuzzy controller specifies the command voltage for the damper by using isolation displacement and velocity as the two input variables. In particular, the supervisory controller tunes normalization factors of the sub-level controller inputs and the scaling factor of the sub-level controller outputs in order to improve the performance of the controller under different types of earthquakes. Taking into account that the pulse-type near-fault earthquake contains great acceleration and velocity pulses, seismic acceleration and seismic velocity are selected as two inputs of the supervisory controller. In order to verify the adaptability of the proposed control strategy under earthquakes with different intensities, and pulse-type near-fault earthquakes, non-pulse-type near-fault earthquakes and far-field earthquakes are employed as external excitations in the numerical simulations. For comparison purposes, maximum passive operation of the PFD and uncontrolled case are also considered in the simulations. A series of numerical simulations for the base-isolated building is performed to assess the performance of the control strategy.
5. Numerical Simulations
A total of sixteen earthquake records, shown in
Table 1, were selected to evaluate the performance of the proposed self-tuning hierarchic fuzzy control strategy. The peak accelerations of the earthquakes are scaled to 0.4 g. A series of time history analyses for the base-isolated structure were performed with MATLAB/Simulink under the mentioned earthquakes. To evaluate the performance of the base-isolated structure for different cases, a total of nine performance indices are employed in this paper, as shown in
Table 6 [
27]. Here, the performance indices
through
denote peak base shear, peak structural shear, peak base displacement, peak inter-story drift, and peak floor acceleration in the controlled structure normalized by the corresponding values in the uncontrolled structure, respectively;
and
denote root mean square (RMS) base displacement and floor accelerations of the controlled structure that are normalized likewise, respectively;
denotes the peak force generated by piezoelectric friction dampers normalized by the peak base shear in the controlled structure; and
denotes energy dissipated by the dampers normalized by the earthquake input energy to the controlled structure.
In
Table 6,
and
denote the base shear for the controlled and uncontrolled structures, respectively;
and
denote the structure shear for the controlled and uncontrolled structures, respectively;
and
denote the base displacement for the controlled and uncontrolled structures, respectively;
and
denote the inter-story drift for the controlled and uncontrolled structures, respectively;
and
denote the absolute floor acceleration for the controlled and uncontrolled structures, respectively;
and
denote the force generated by the PFD and the base shear in the controlled structures, respectively;
and
denote the RMS base displacement for the controlled and uncontrolled structures, respectively;
and
the RMS absolute floor acceleration for the controlled and uncontrolled structures, respectively; and
is vector of the ground accelerations.
To evaluate the influence of the pulse effects of the pulse-type near-fault earthquakes (namely, fling-step effect and rupture forward directivity effect) on the base-isolated structure controlled by the SHFLC, the peak inter-story drift, peak floor acceleration and peak base displacement of the SHFLC isolated structure are firstly evaluated.
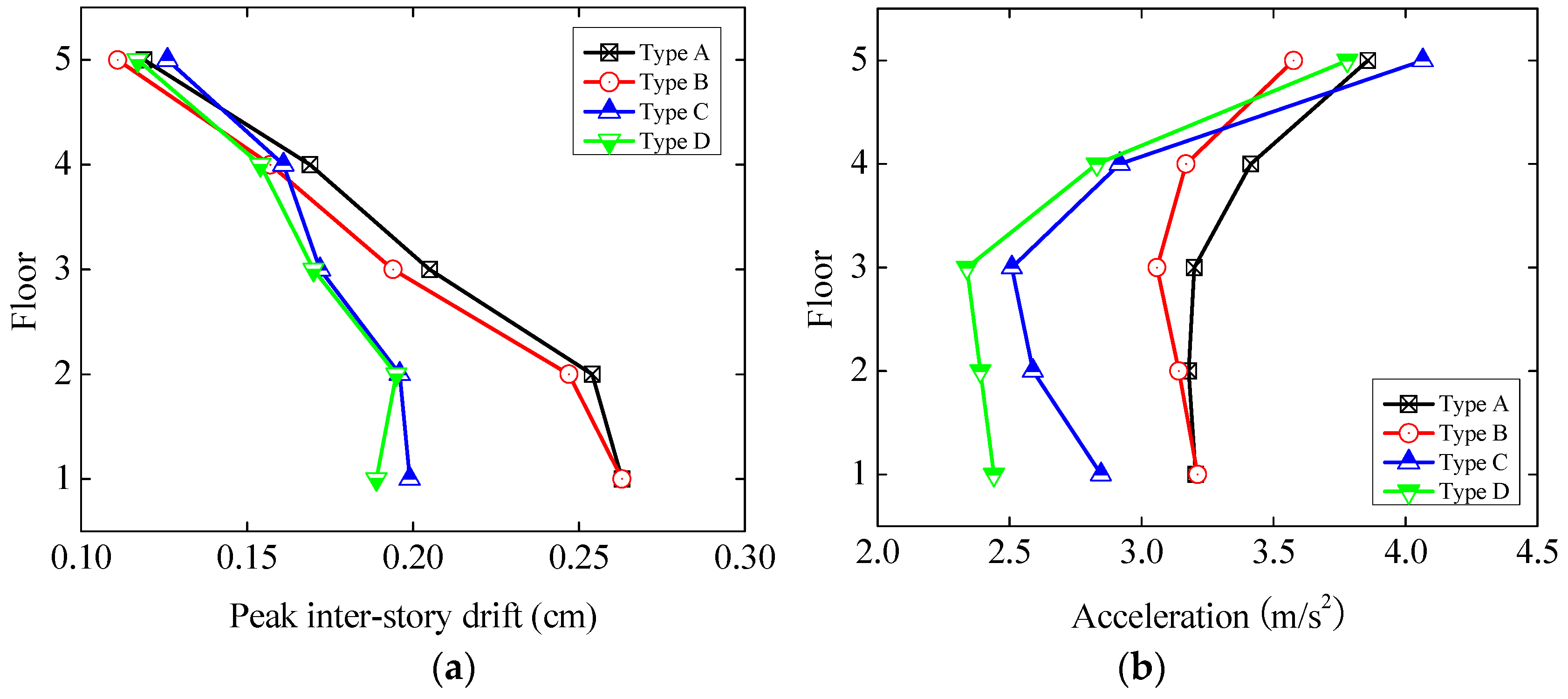
Figure 8 shows the comparison of the average peak inter-story drift and floor acceleration of the SHFLC isolated structure under the four types of earthquake. It can be seen from the figure that, compared to non-pulse-type near-fault earthquakes (type C) and far-field earthquakes(type D), pulse-type near-fault earthquakes (types A and B) can cause much larger inter-story drifts and floor accelerations at the bottom and center of SHFLC isolated structure, and this will decrease gradually with the height of the floors. It is also noted that, for the type C near-fault earthquakes, the peak inter-story drifts and floor accelerations at the top of the isolated superstructure exceed the corresponding values of the pulse-type near-fault earthquakes. For the pulse-type near-fault earthquakes, the earthquakes containing fling-step effect (type A) can induce much larger responses of the SHFLC isolated superstructure excepting at the bottom floor. In addition, far-field earthquakes (type D) have a minimal influence on the inter-story drifts of SHFLC isolated superstructure.
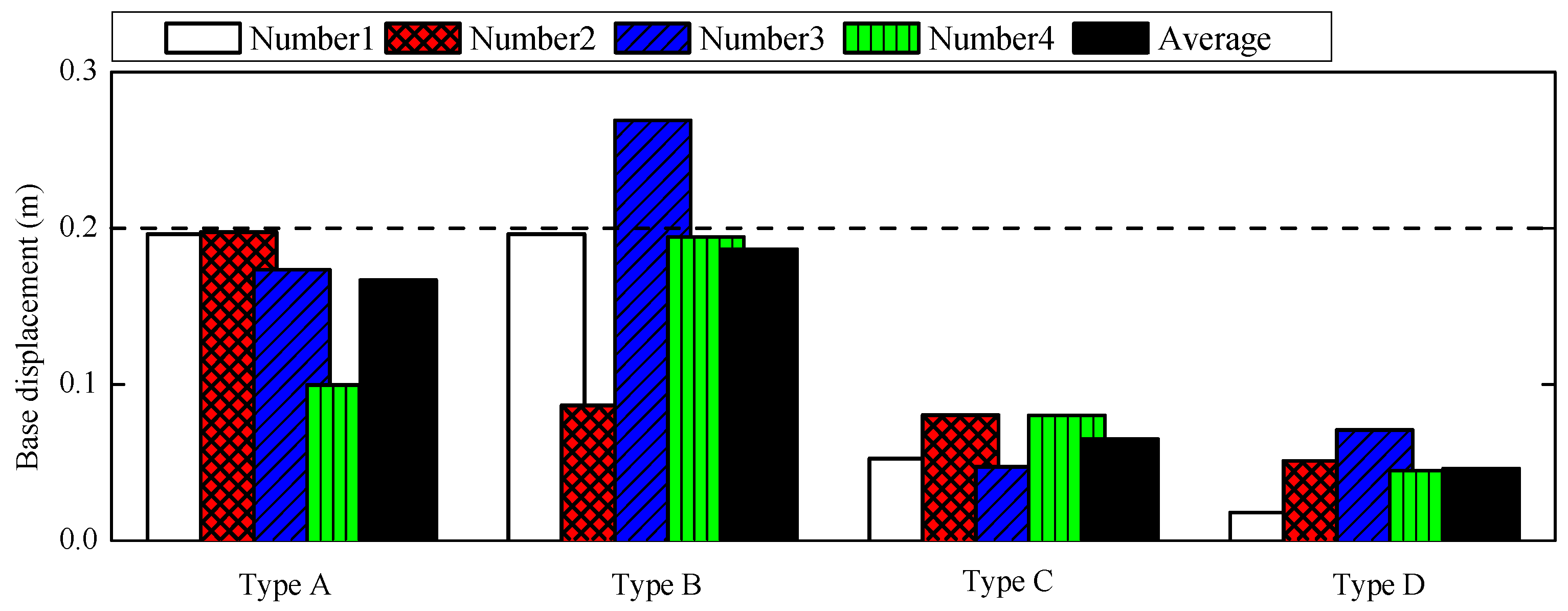
To explore the influence of pulse-type near-fault earthquakes on base displacements, the peak base displacements of SHFLC isolated structure under four types of earthquakes are shown in
Figure 9. It can be seen from this figure that the peak base displacements of SHFLC isolated structure are less than 0.2 m for most of the pulse-type near-fault earthquakes. For the two types of near-fault earthquakes with the fling-step effect and the rupture forward directivity, the average peak base displacement is 0.167 m and 0.187 m, respectively. However, the base displacement decreased was evident when subjected to non-pulse-type near-fault and far field earthquakes, with the average peak base displacements equal to 0.065 m and 0.046 m, respectively. It can be concluded that pulse-type near-fault earthquakes can lead to much larger responses for SHFLC isolated structure as compared to non-pulse-type near fault earthquake and far-field earthquake, especially in the isolation layer and the bottom of the superstructure.
The performance indices for the pulse-type near-fault earthquakes and the earthquakes without pulse-effect are listed in
Table 7 and
Table 8, respectively. In these tables, the self-tuning hierarchic fuzzy logic control strategy is named SHFLC. Moreover, for comparison, the results for the maximum passive operation of PFDs are also listed in these tables. Numbers in bold font indicate the best results among the two control cases for the given excitations. Base displacement is an important index to evaluate the effectiveness of the proposed control strategy. For a base-isolated structure subjected to pulse-type near-fault earthquakes, one of the primary purposes is to prevent permanent damage on the isolation bearing or collision with adjacent structures. In these tables, it can be seen that although the maximum passive operation of the PFDs can successfully reduce the performance indices associated with the peak and RMS base displacements (
and
), it will lead to significant amplification in peak and RMS floor acceleration (
and
) for most of the selected earthquakes due to the large constant damper force. For pulse-type near-fault earthquakes, such as A1, A4, B1, B2, and B4, the maximum passive operation of the PFD increases the peak floor acceleration by 40%, 74%, 31%, 52% and 33%, respectively, compared to the uncontrolled structure. However, for the earthquake without pulse-effect, the maximum passive operation of the PFD caused an increase in the responses compared to the uncontrolled structure, except for the C4 earthquake. The increase in peak acceleration (
) for C1, C2, C3, D1, D2, D3, and D4 are 48%, 29%, 42%, 17%, 37%, 22% and 39%, respectively.
Although the SHFLC also increases the peak floor acceleration with respect to the uncontrolled structure under most of the earthquakes, the SHFLC can successfully limit the increase in peak floor accelerations for the selected earthquakes. For example, for A4, B2, C2, and D2 earthquakes, maximum passive operation of PFD increases peak floor acceleration () by 74%, 52%, 29%, and 37%, respectively, while SHFLC increases these responses by 30%, 2%, 3%, and 14%. Additionally, the SHFLC case can lead to obvious decreases in RMS floor acceleration () for most of the selected earthquakes. In addition, it can be seen that the SHFLC case can reduce peak and RMS base displacements for most of the selected earthquakes, which indicates the effectiveness of the proposed control strategy subjected to different types of earthquakes.
According to the definition of performance indices,
,
,
and
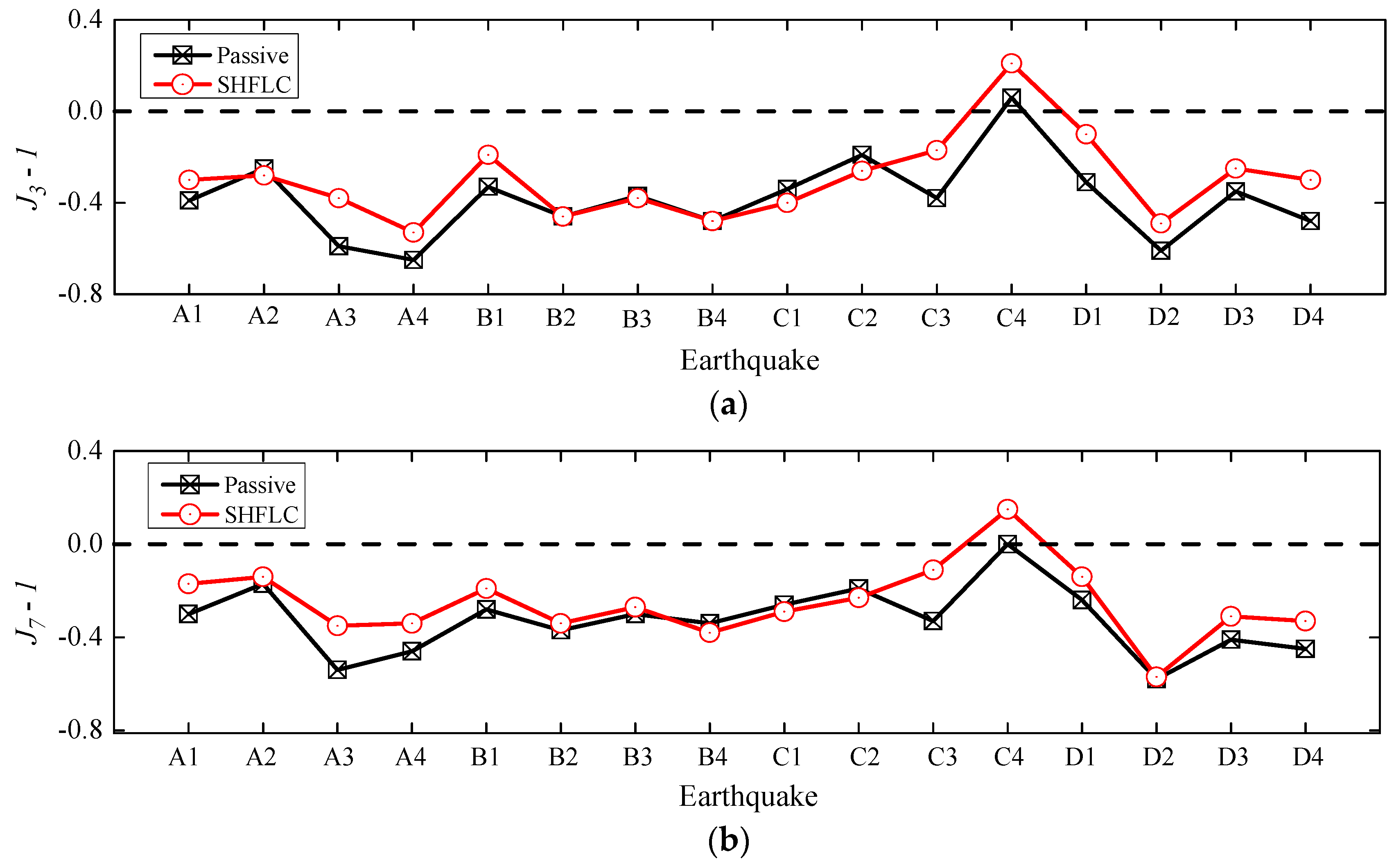
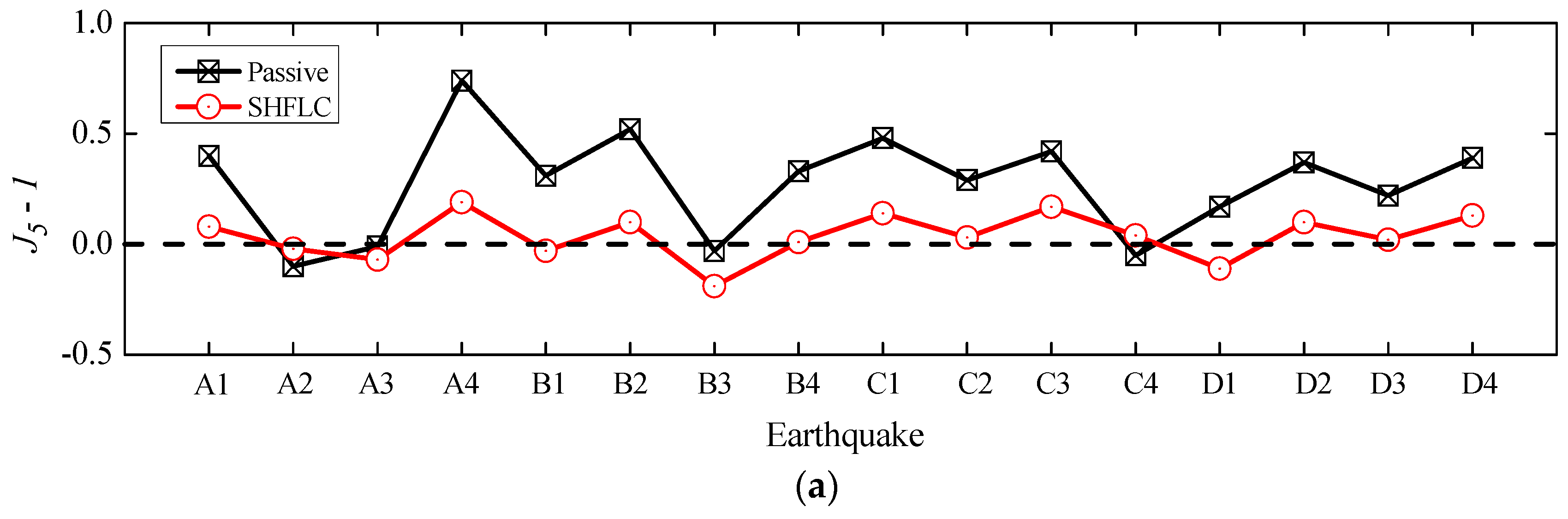
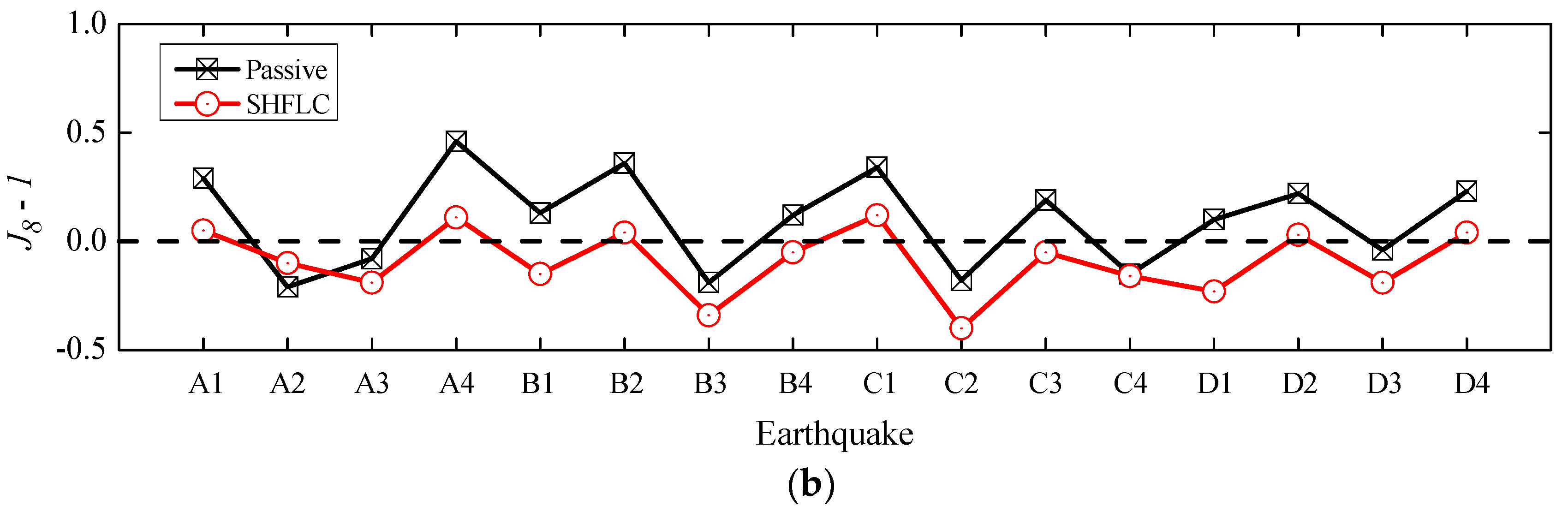
for the uncontrolled base-isolated structure are equal to 1. In order to graphically compare the control effectiveness of maximum passive control case and the developed SHFLC case with the uncontrolled case for peak and RMS base displacements and floor accelerations,
Figure 10 and
Figure 11 show the difference between the performance indices
,
,
and
for control cases and the performance index 1 for uncontrolled case. The vertical coordinate of these figures is the difference between the performance indices and 1, a negative value indicates that the structural response is reduced relative to the uncontrolled structure, and a positive value illustrates that the structural response is amplified relative to the uncontrolled structure. The absolute value of the vertical coordinate is the proportion of the reduction or amplification. In
Figure 10, it can be seen that, compared to the uncontrolled case, the peak and RMS displacements of the base for the two control cases are significantly reduced. The control effect of the maximum passive control for the base displacement is much larger. For the maximum passive control case and the SHFLC case, the average reduction ratios of the peak base displacement under types A and B in
Table 1 are 38.3% and 29.8%, respectively. For the passive control case and SHFLC case, the average reduction ratios of the RMS base displacement are 32.6% and 25.1%, respectively. However, it can be seen in
Figure 11 that the max passive control can significantly amplify the peak and RMS floor acceleration for most of the selected earthquakes. Similarly, for the SHFLC case, the peak and RMS floor accelerations will be amplified for some of the selected earthquakes. For the maximum passive control case and SHFLC case, the average amplification ratios of peak floor acceleration are 27.8% and 3.7%, respectively. For the maximum passive control case, the average amplification ratio of RMS floor acceleration is 28.3%, while the average reduction ratio of the RMS floor acceleration for the SHFLC case is only 9.2%. In summary, as compared to maximum passive control case for all the excitation cases, the SHFLC case produces an average of 24.1% and 19.1% reductions in peak and RMS floor acceleration at an expense of an average of 8.5% and 7.6% increase in peak and RMS base displacements. In
Figure 10 and
Figure 11, it can be seen that, compared to the maximum passive control, for most of the excitation cases, the SHFLC case considerably improves the performance of the base-isolated structure in peak and RMS floor accelerations at the cost of slight deterioration of peak and RMS base displacements. Therefore, semi-active operation of PFDs with the SHFLC is more favorable than the passive operation of the dampers in simultaneously suppressing the peak base displacement and peak floor acceleration.
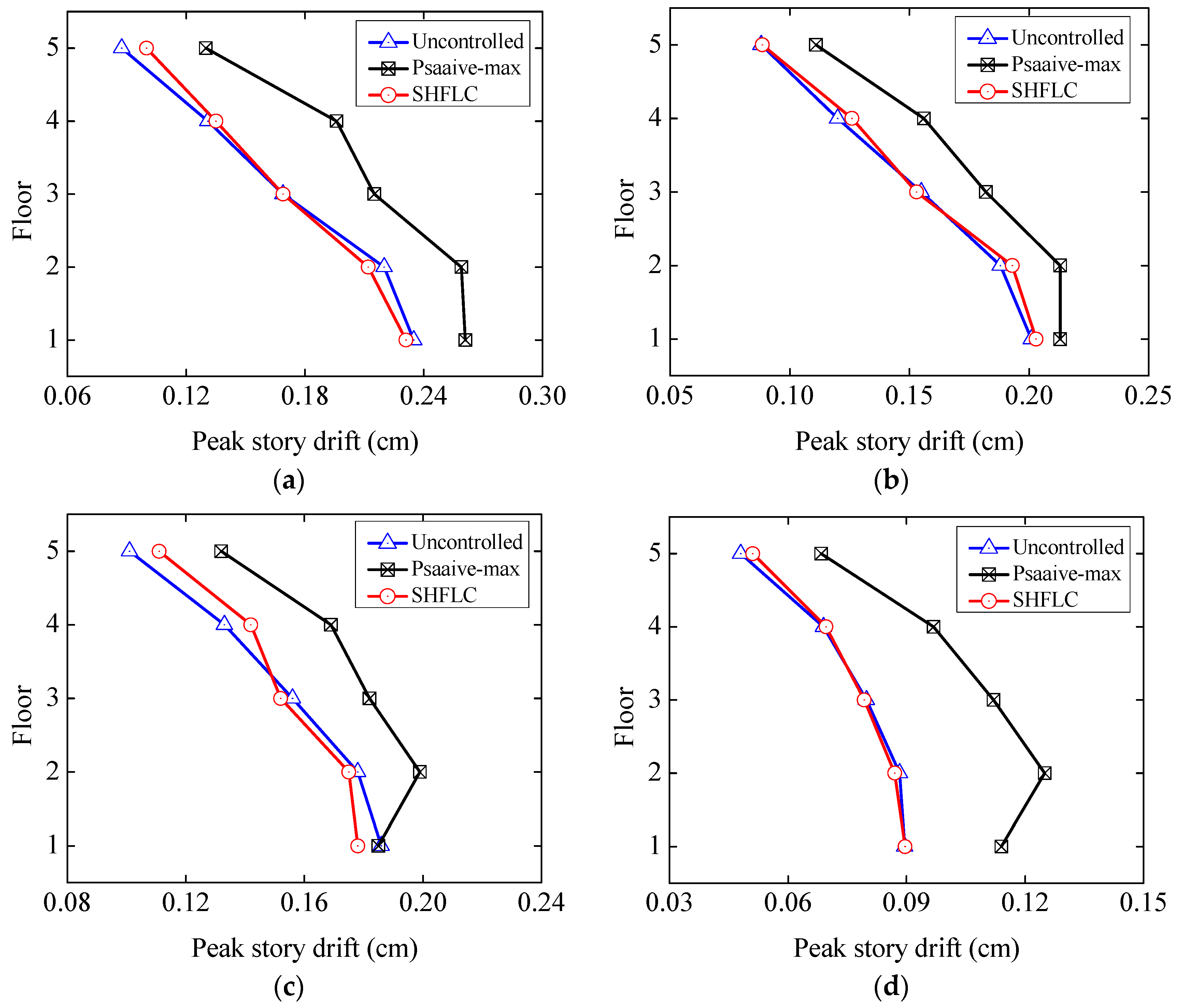
Figure 12 illustrates the profiles of average inter-story drifts for uncontrolled, maximum passive control and SHFLC cases. In the figure, it can be seen that the SHFLC case is better than the maximum passive control in inter-story drift reductions of base-isolated structure. Compared with uncontrolled base-isolated structure, there is no obvious amplification in inter-story drifts in the SHFLC case. Furthermore, the inter-story drifts of the SHFLC case at the bottom of the superstructure have an appropriate reduction, which can be illustrated by the performance indices
shown in
Table 7 and
Table 8, respectively. The values of
for the SHFLC case subjected to most earthquakes is less than 1, which demonstrates that the peak inter-story drift of the SHFLC case is reduced relative to uncontrolled structure.
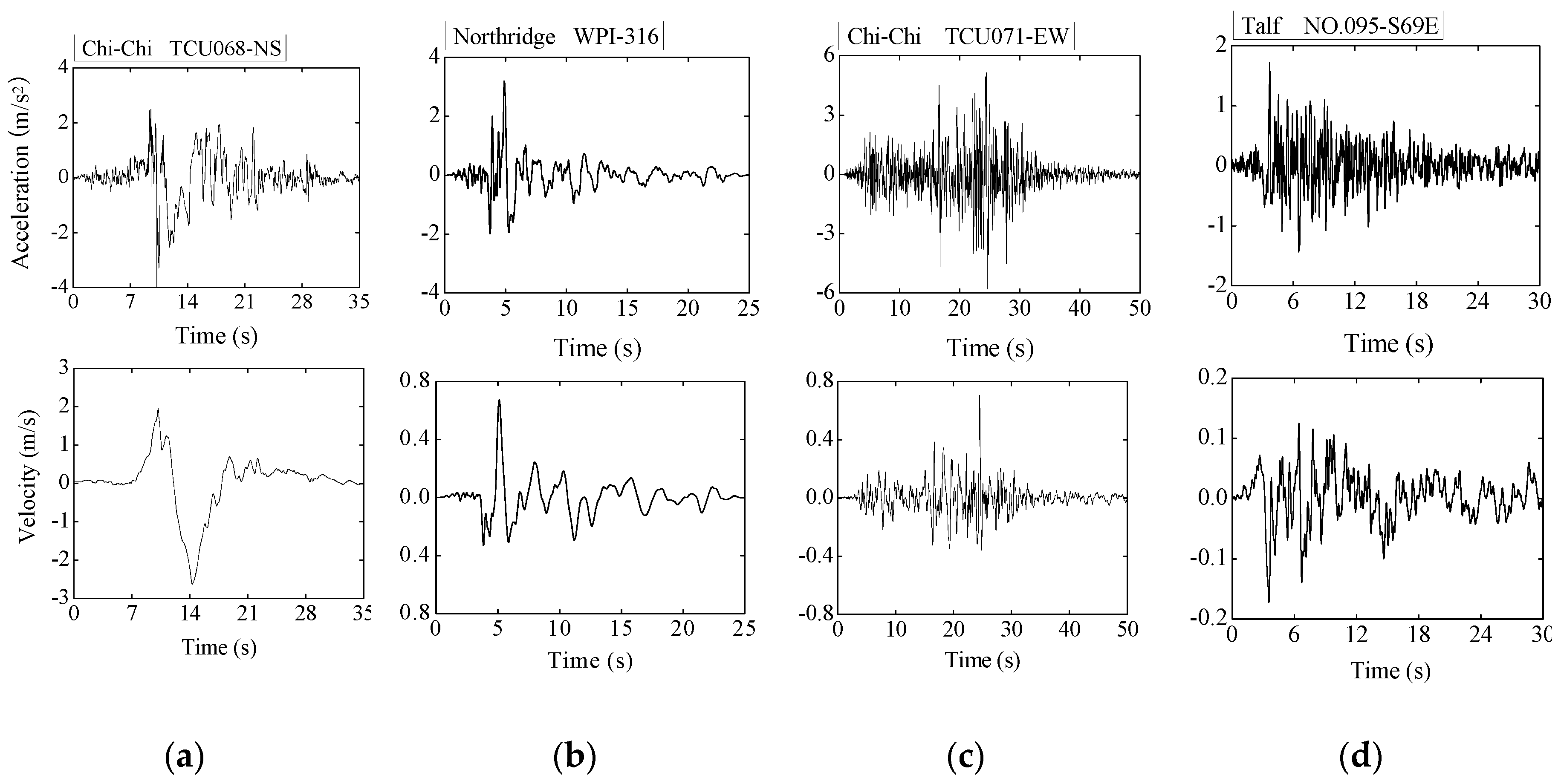
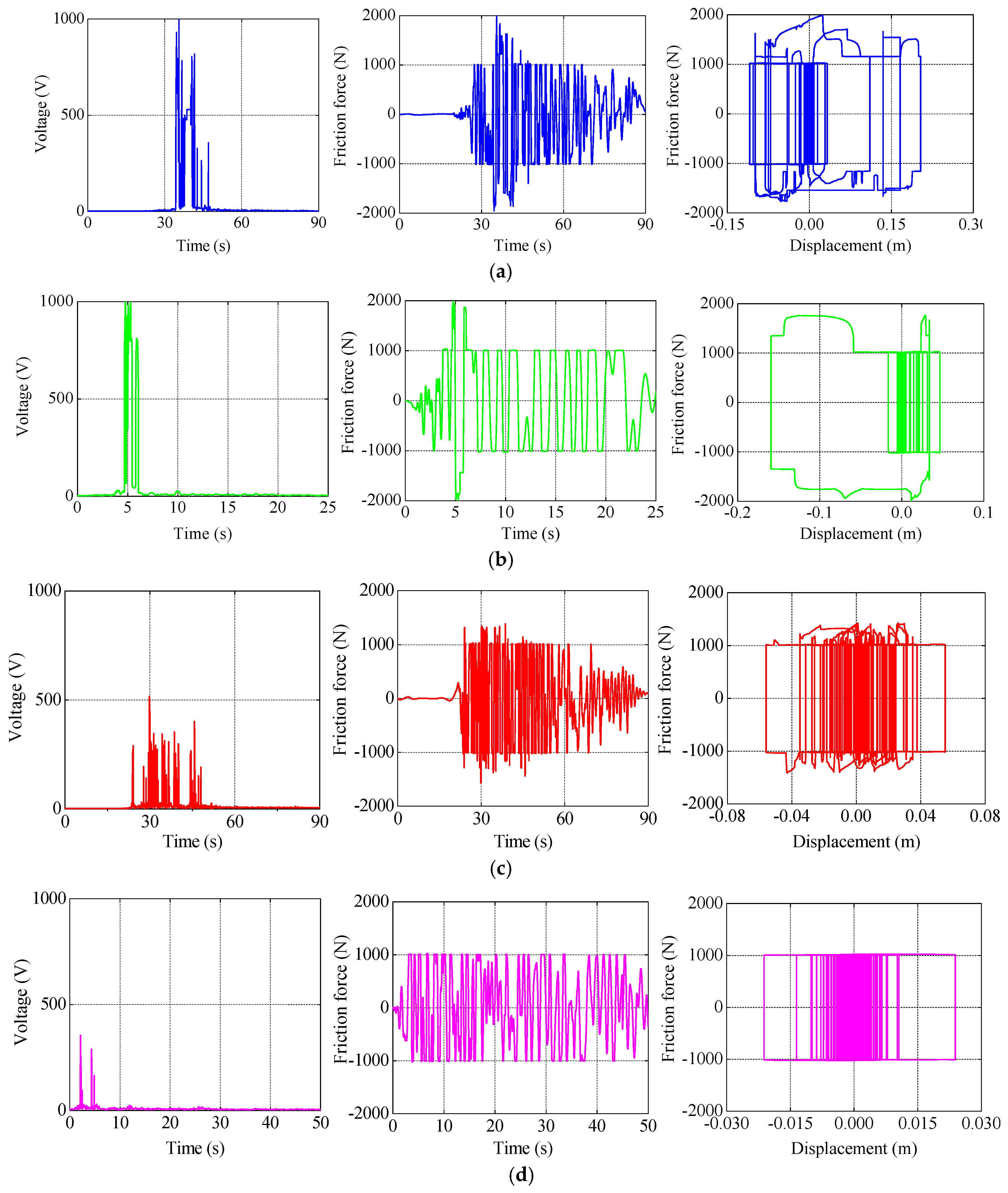
In order to further evaluate the adaptability of the proposed SHFLC control strategy under different types of earthquakes, the command voltage time history, the damping force time history and the force–displacement curve of the PFD with the SHFLC control strategy are shown in
Figure 13, for different earthquake records. As seen in
Figure 13, under the pulse-type near-fault earthquakes, such as the TCU068-NS record of the Chi-Chi earthquake with fling effect and the WPI-316 record of the Northridge earthquake with rupture forward directivity, the SHFLC method can output the full amplitude voltage in real time when subjected to large pulse earthquakes. In these cases, large structural responses will be produced and the PFD will output large damping forces to control the base displacement. Therefore, the large output command voltage of the controller will lead to many irregular serrations in the force–displacement curve of the PFD.
However, for non-pulse-type near-fault earthquakes and far-field earthquakes, such as the TCU071-EW record of the Chi-Chi earthquake and the No.095-S69E record of the Taft earthquake, the output command voltage of the SHFLC controller is much smaller. In fact, for the No.095-S69E record of the Taft earthquake, the SHFLC controller operates the PFD as a passive Coulomb damper with nearly zero voltage. Therefore, the PFD outputs a small damping force produced by pre-pressure and the force–displacement curve of the PFD is much smoother and similar to that of the passive friction damper. In addition, when comparing the control effort (performance index
) of the SHFLC controller to that of with the maximum passive controller, it can be seen from
Table 7 and
Table 8 that the SHFLC case requires a much smaller control force to be produced by the PFD for most earthquakes.
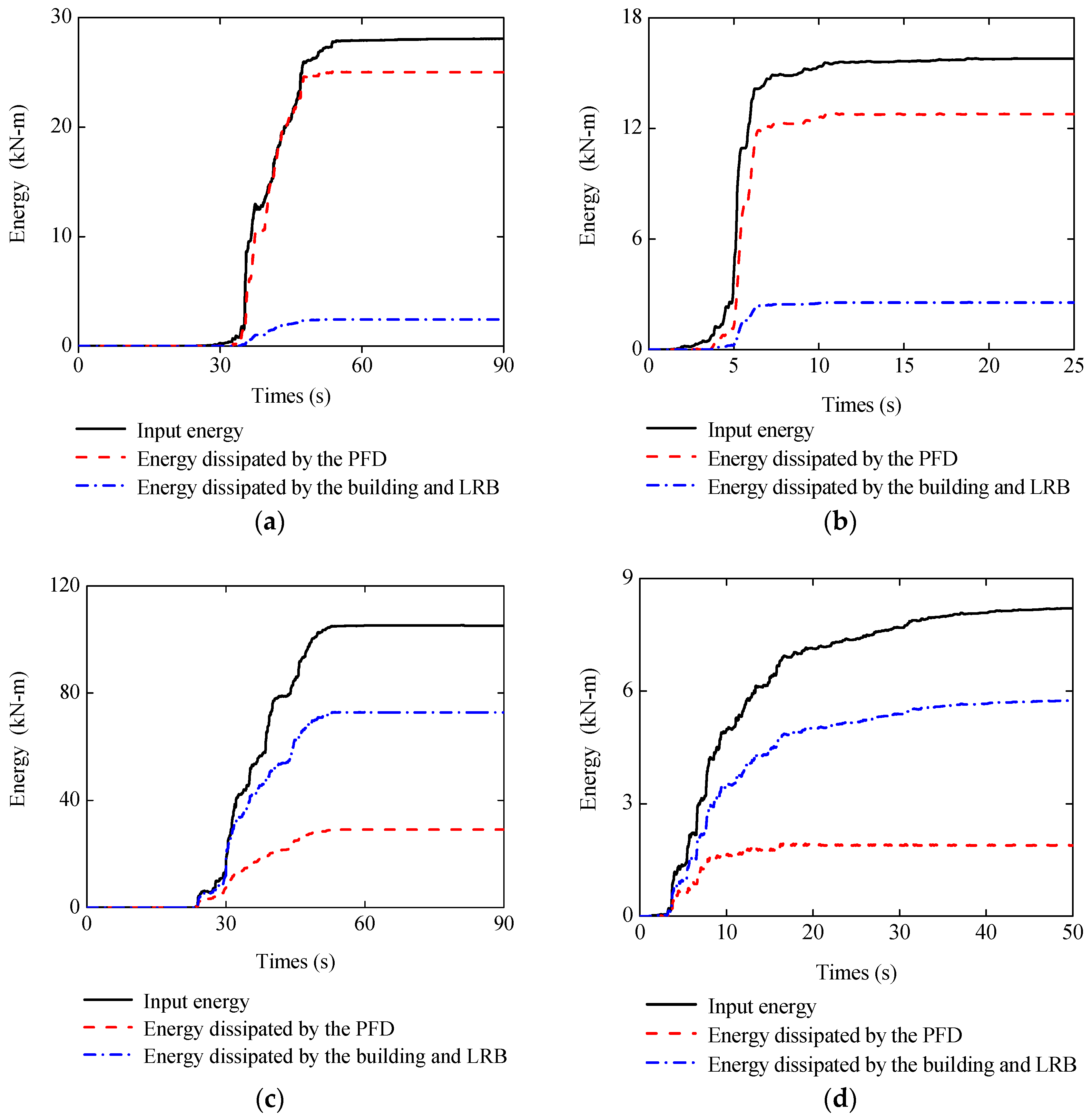
In order to further evaluate the performance of the developed control strategy, the energy balance equations of a base-isolated structure are established. For a base-isolated structure with a PFD, the energy equations for the base-isolated structure are expressed as
where
,
,
,
, and
denote the absolute kinetic energy, the damping energy, the elastic strain energy, the hysteretic energy provided by the PFD, and the absolute input energy, respectively.
Figure 14 shows the time histories of the input energy
, the viscous damped energy of the structure, lead rubber bearings
, and the energy dissipated by the PFD
for the SHFLC base-isolated building subjected to the A3, B1, C1, and D1 earthquakes. It can be seen from the figures that the PFD can successfully dissipate most of the input energy of the pulse-type near-fault earthquakes, such as the TCU068-NS record of the Chi-Chi earthquake and the WPI-316 record of the Northridge earthquake. In
Table 7, it can be seen that the energy performance indices
of the base-isolated structure with SHFLC under A3 and B1 earthquakes equal 0.89 and 0.81, respectively. It can also be seen that the energy performance index
for the SHFLC case for other pulse-type near-fault earthquakes is generally large. Compared to the maximum passive control case, the energy performance index
for the SHFLC case can dissipate a lot more energy for most of the pulse-type near fault earthquakes. However, the energy consumption proportion of the PFD controlled with SHFLC will decrease under the earthquakes without pulse effect (types C and D). In
Table 8, it can be seen that the energy performance index
for the SHFLC case is generally less than 0.4. For example, the performance index
for the SHFLC case subjected to the TCU071-EW record of the Chi-Chi earthquake and the No.095-S69E record of the Taft earthquake are 0.28 and 0.23, respectively. This means that the energy dissipation proportion of the PFD for the SHFLC case is 28% and 23%, respectively. From the energy time history curves for the SHFLC case under C1 and D1 earthquakes in
Figure 14, it can also be seen that the energy dissipation proportion of the isolation building will increase, which means that most of the seismic input energy will be dissipated. The above results reflect the adaptability of the proposed SHFLC control strategy for different types of earthquakes.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}