
PTMD Control on a Benchmark TV Tower under Earthquake and Wind Load Excitations



Abstract
:1. Introduction
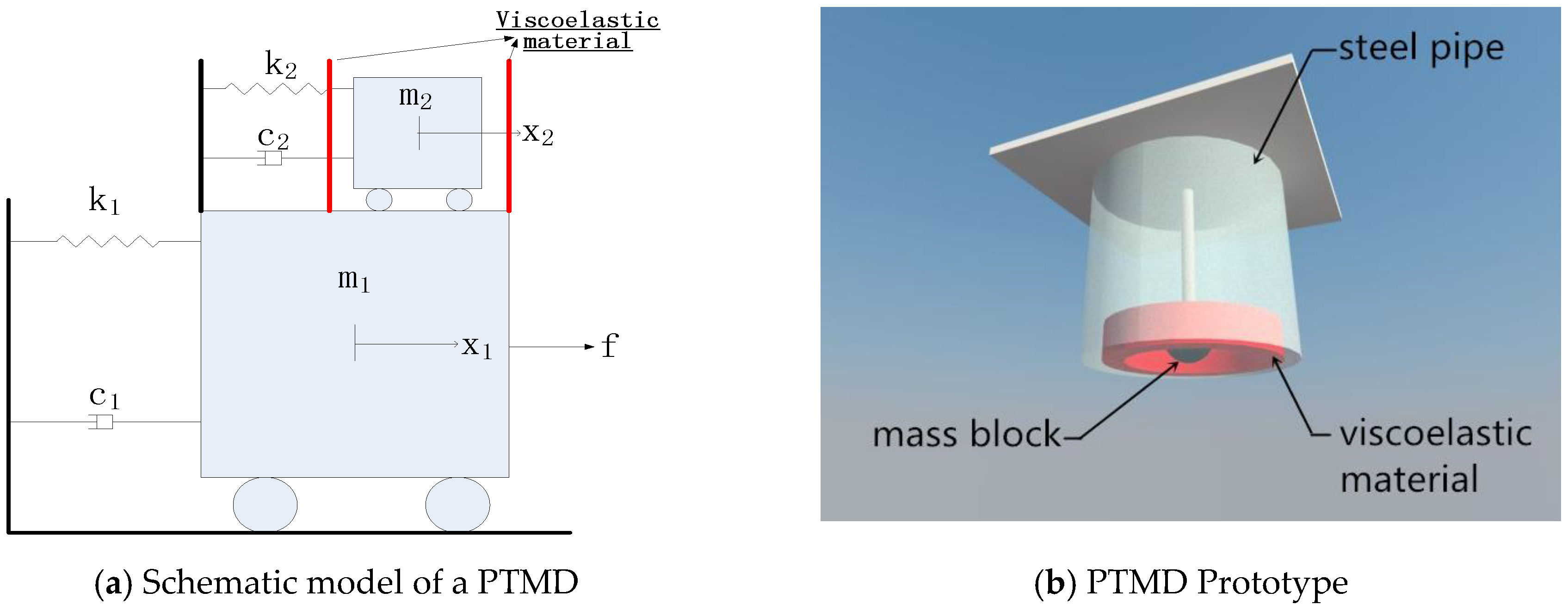
2. Schematic Model of a Pounding Tuned Mass Damper (PTMD)
3. Modeling of Structure Installed with PTMD
4. Improved Pounding Model
4.1. Improved Hertz Contact-Based Pounding Model
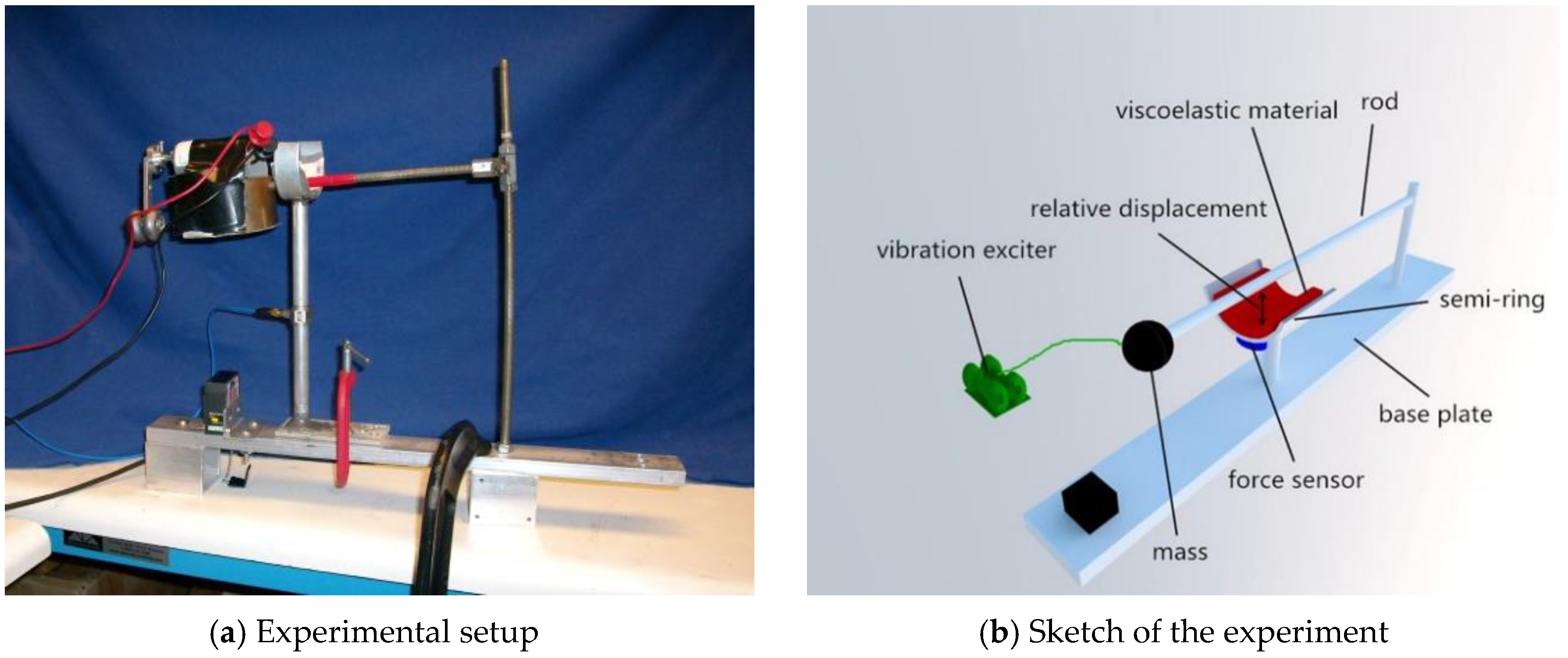
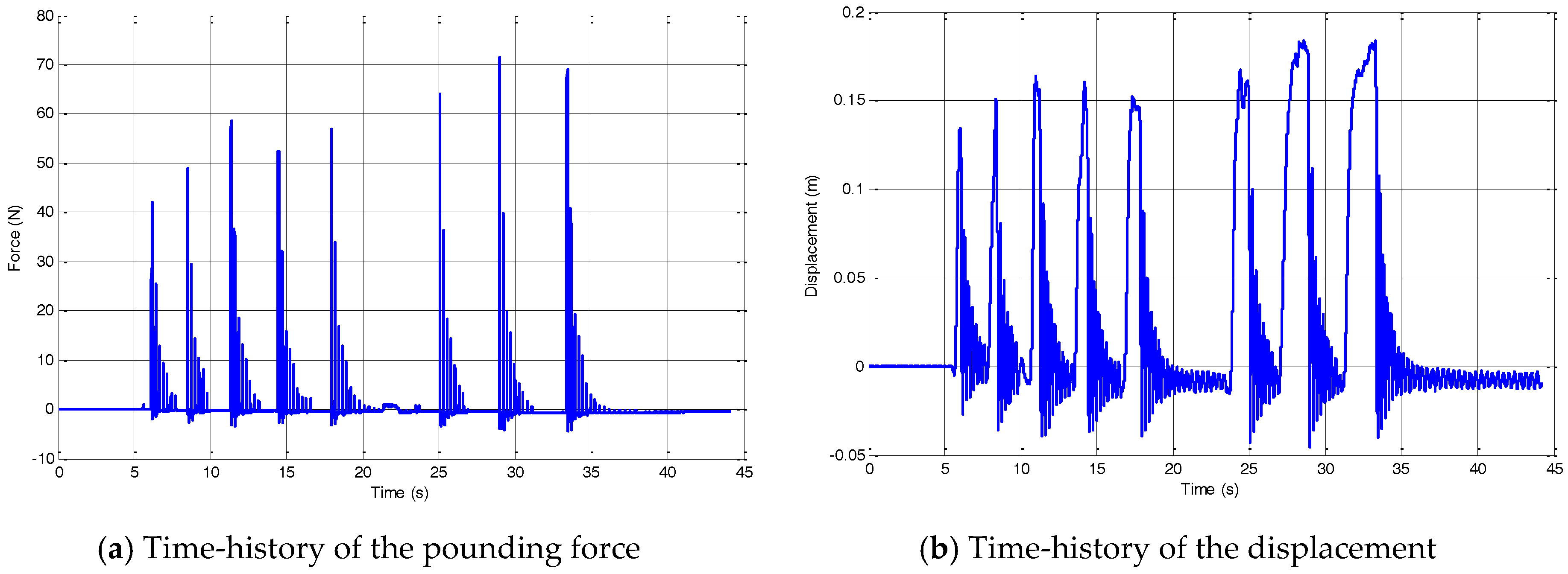
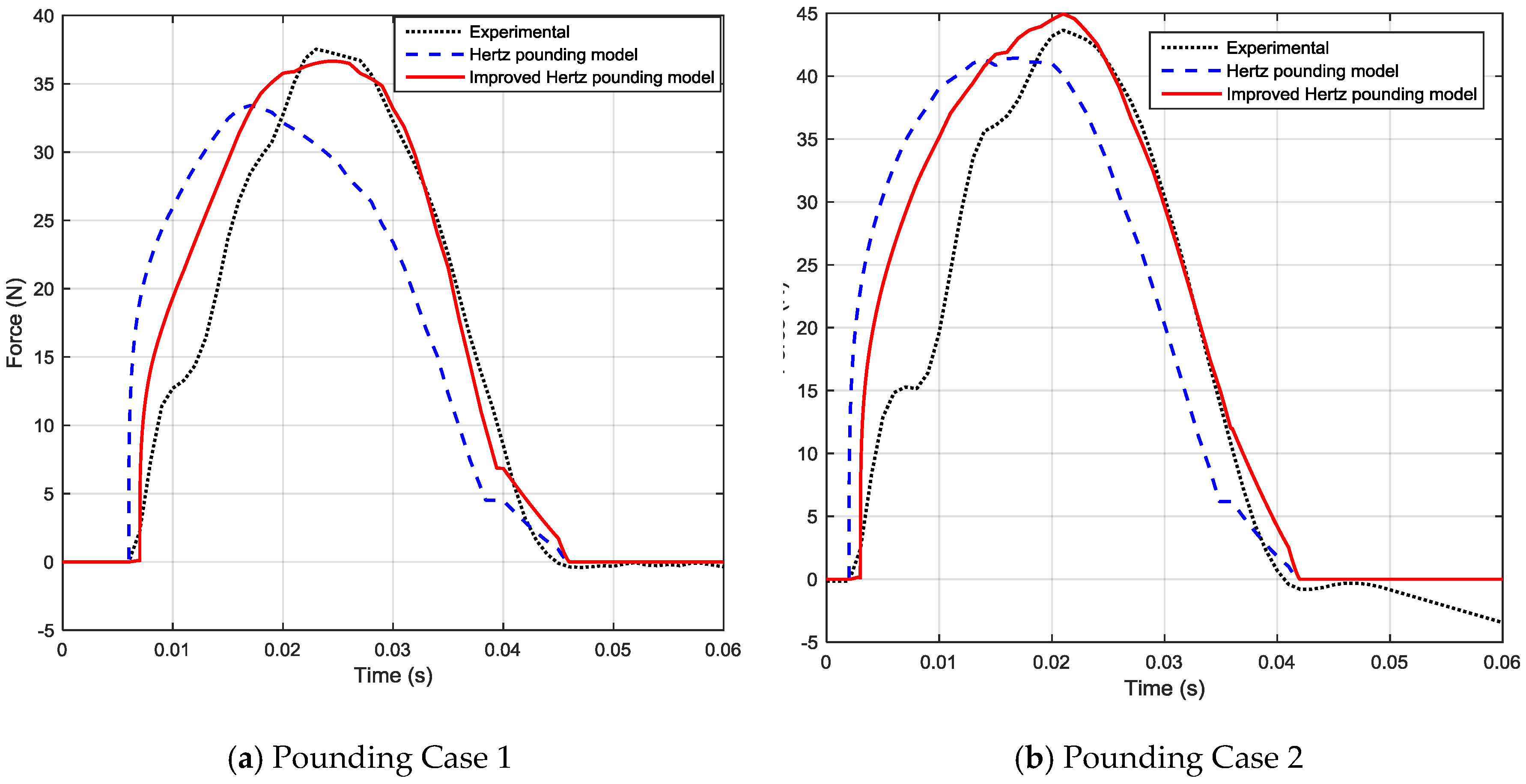
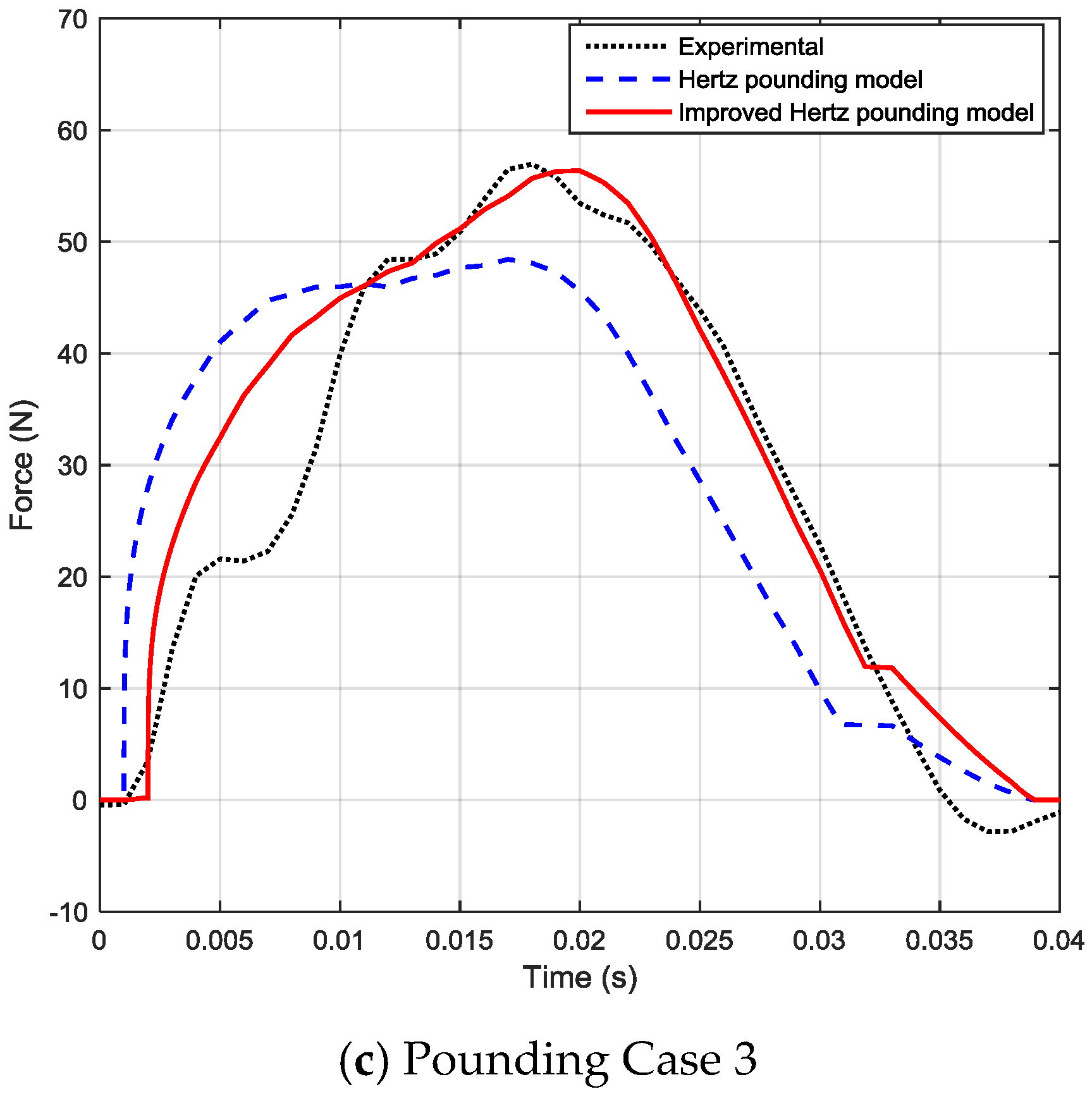
4.2. Experimental Validation
4.3. Parameter Tuning
5. SHM System and Benchmark Model of the Canton Tower
6. Vibration Control with PTMD
6.1. Design of the PTMD
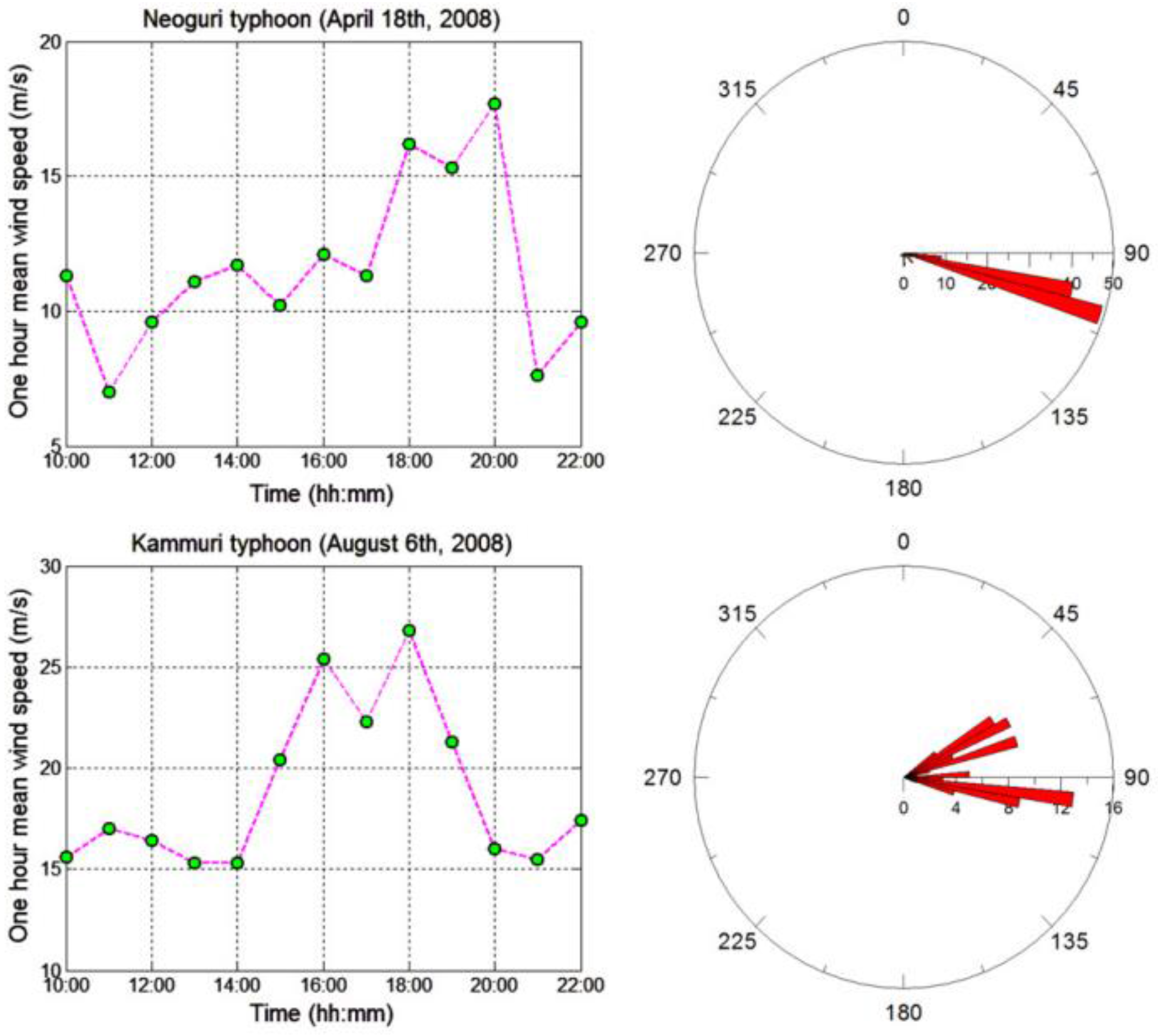
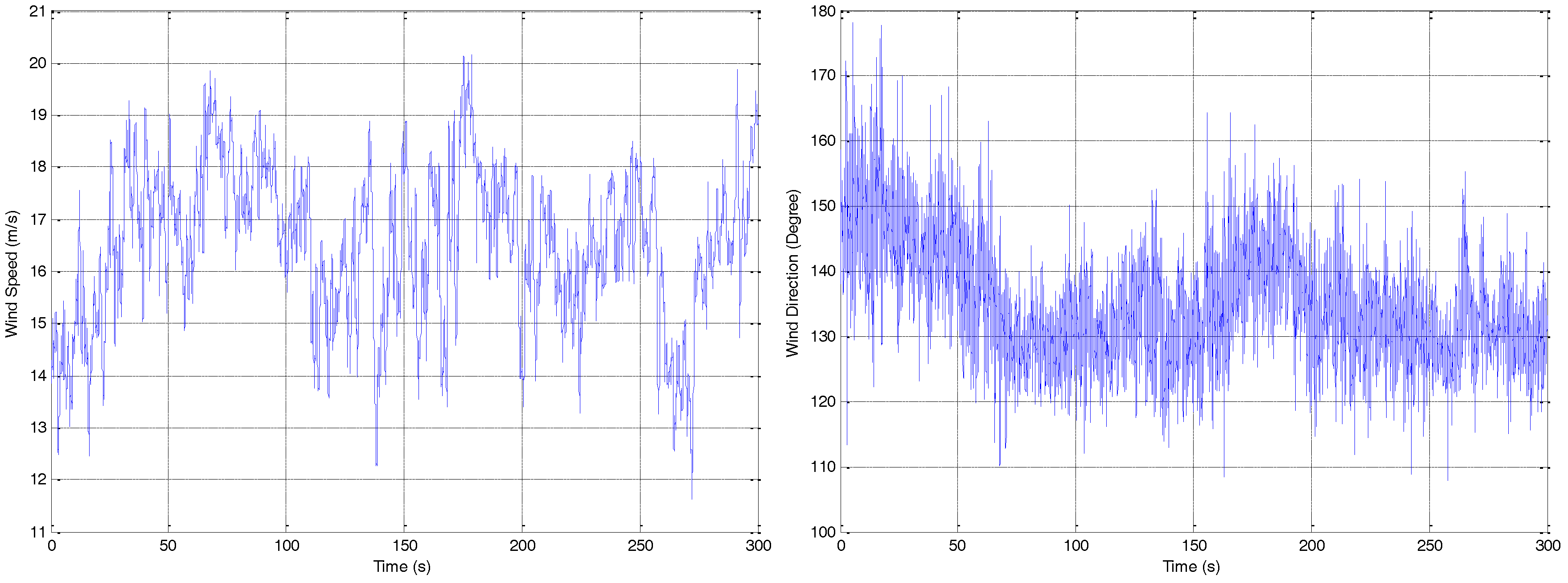
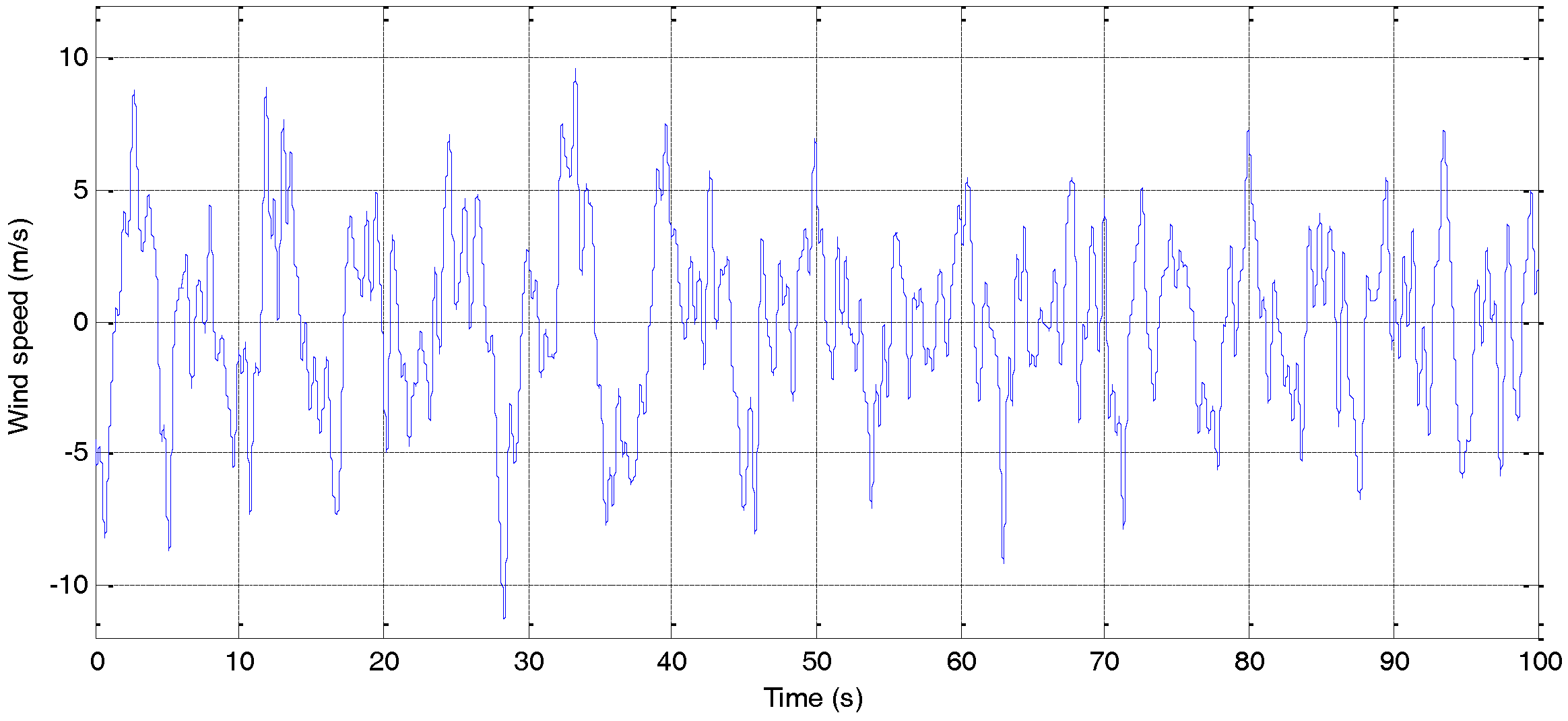
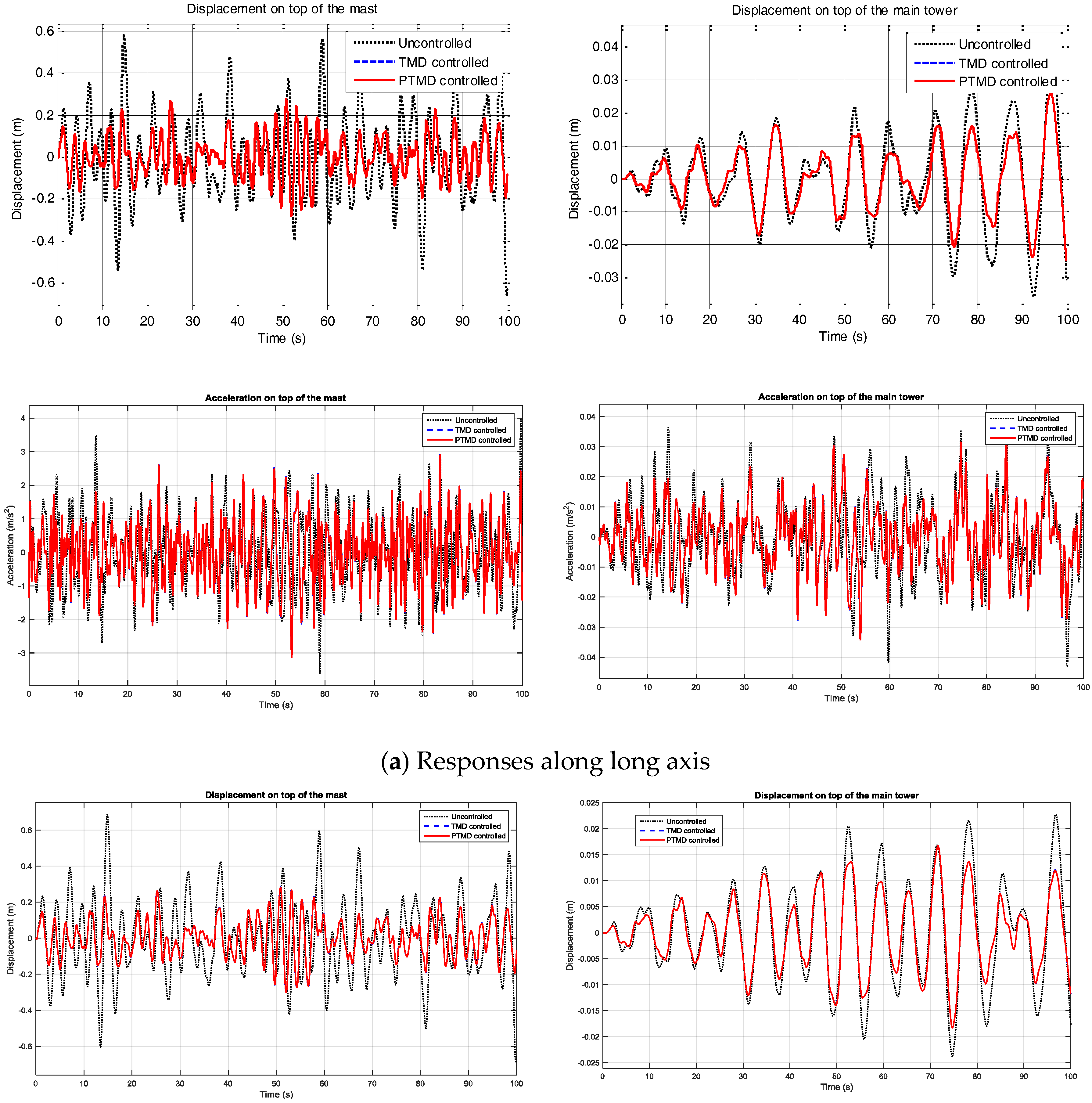
6.2. Wind Load Excitation Cases
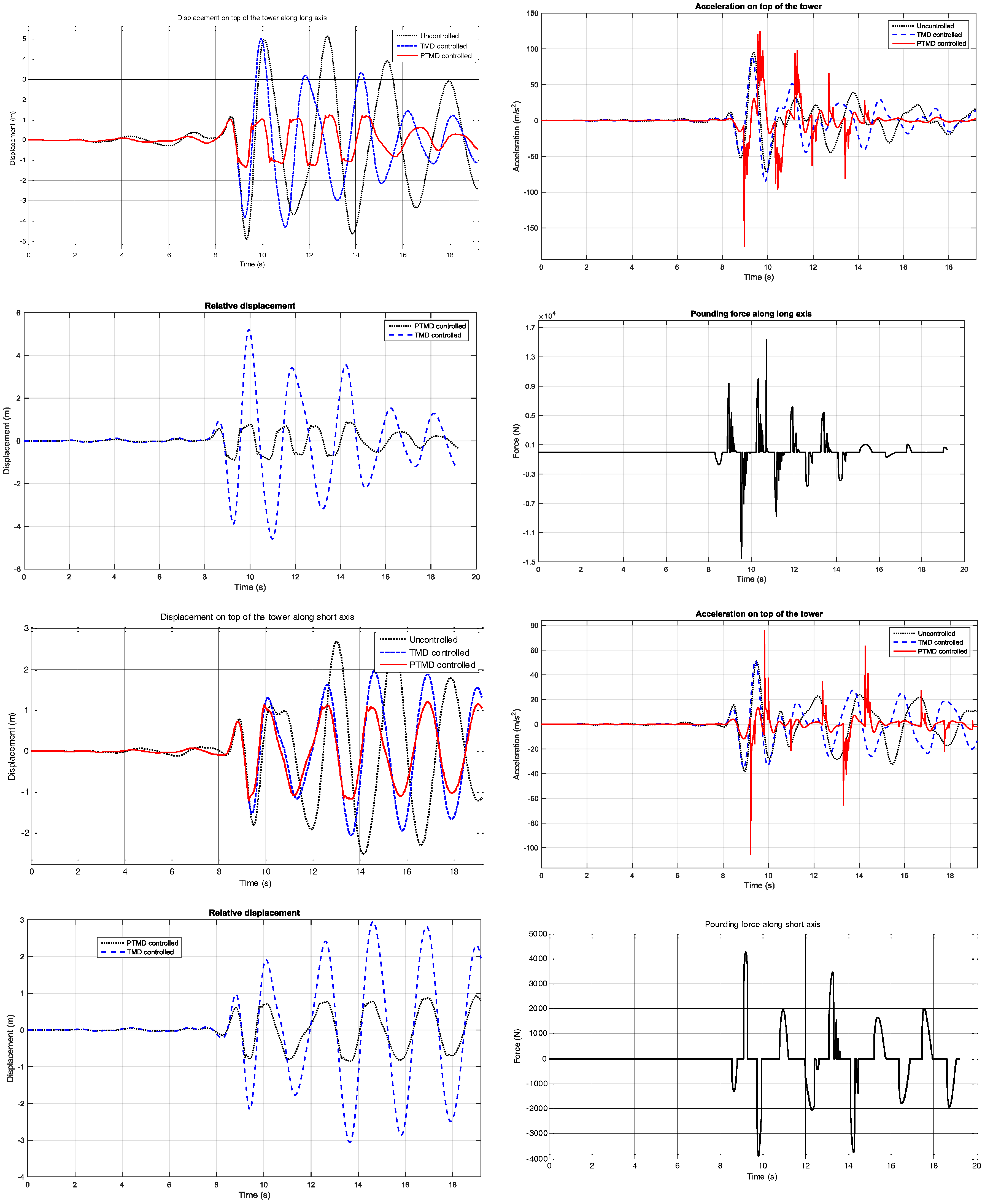
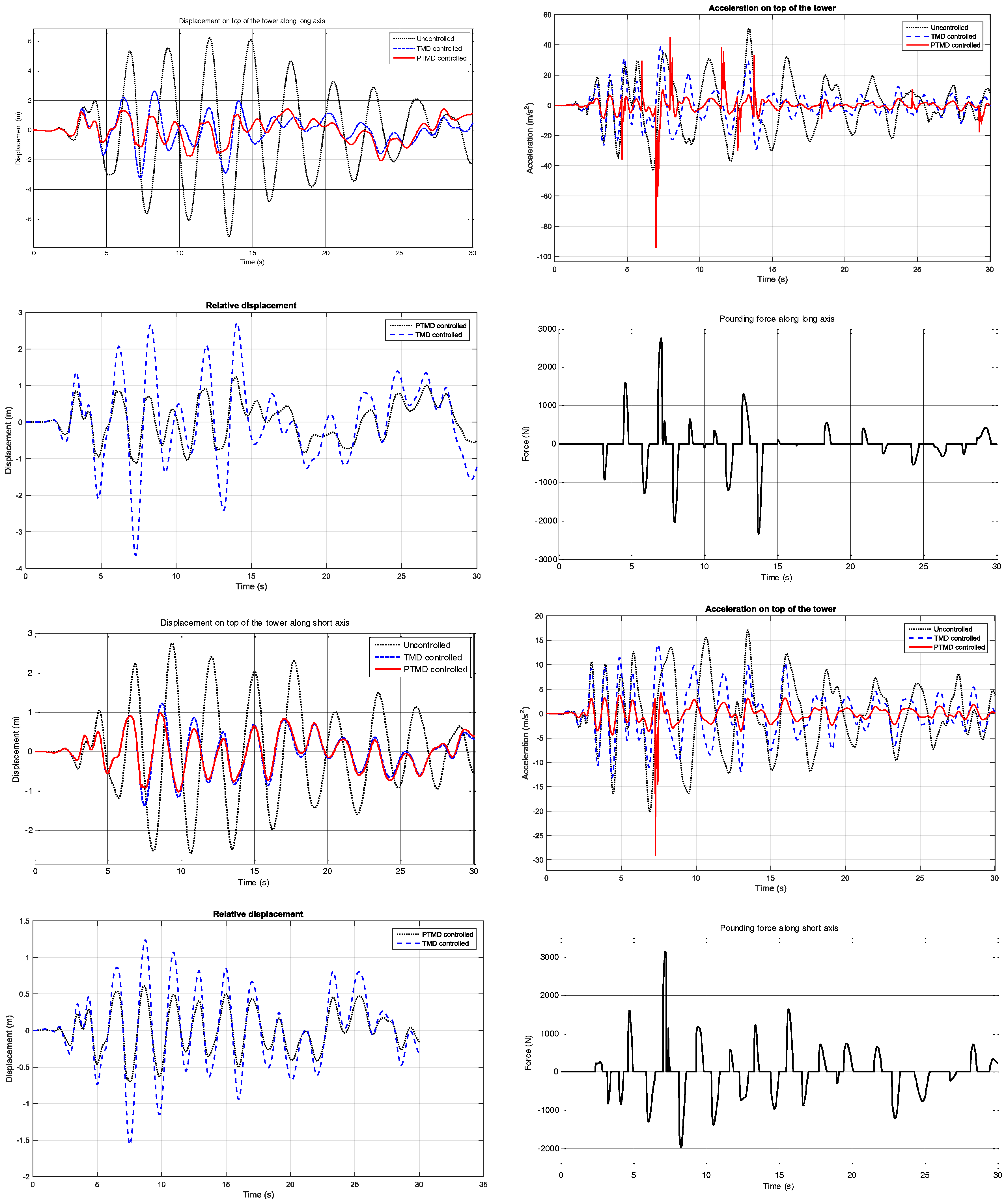
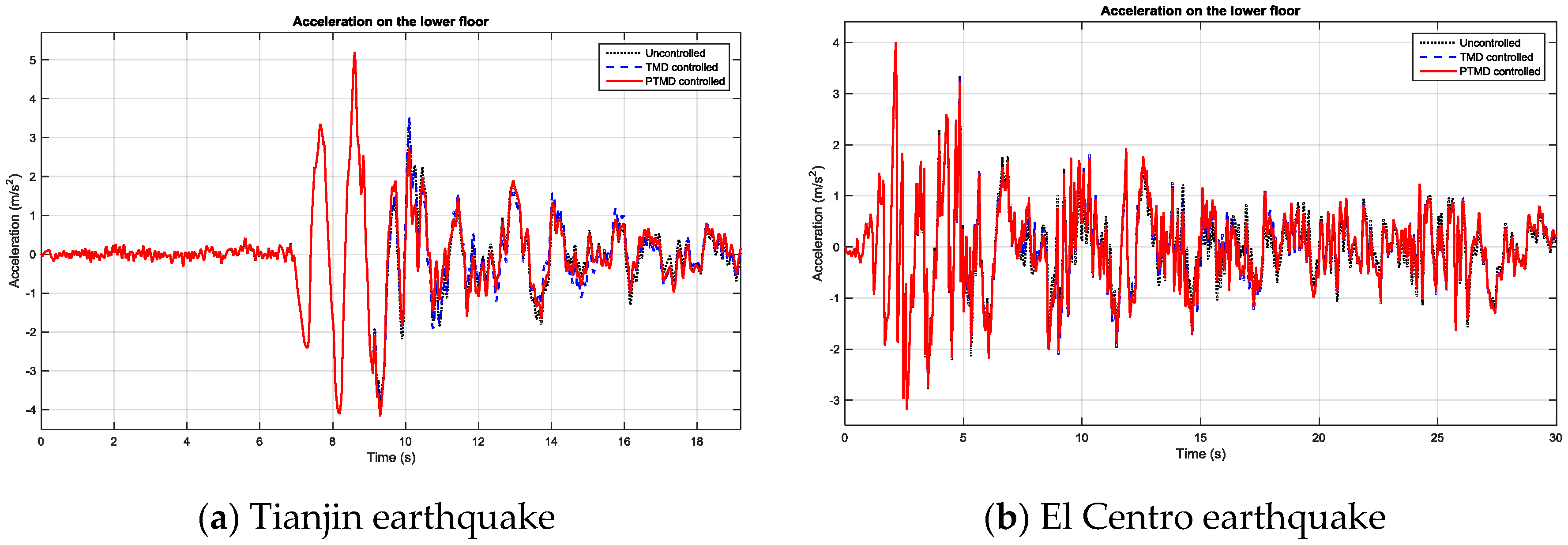
6.3. Optimization Control Effectiveness under Earthquake Excitation
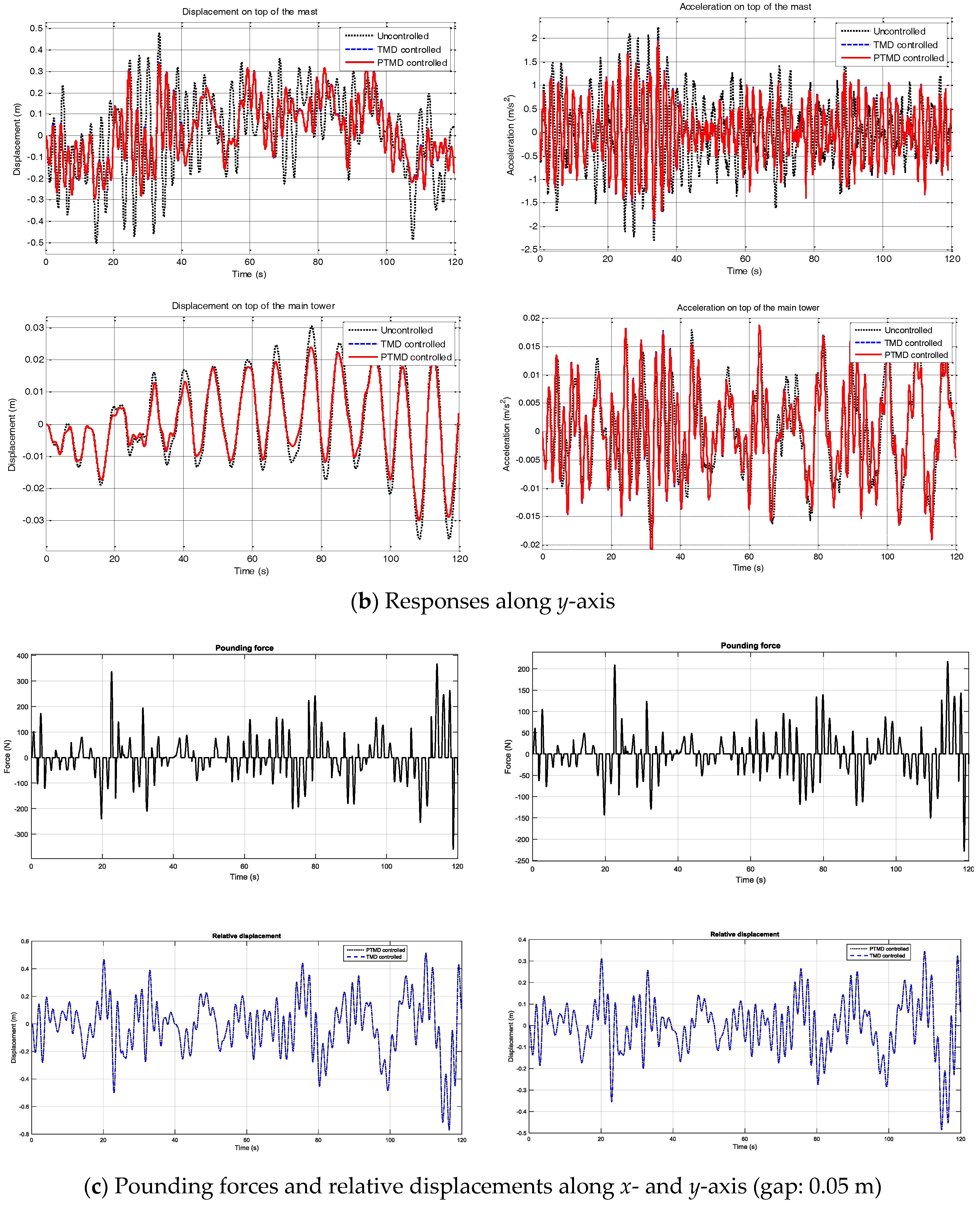
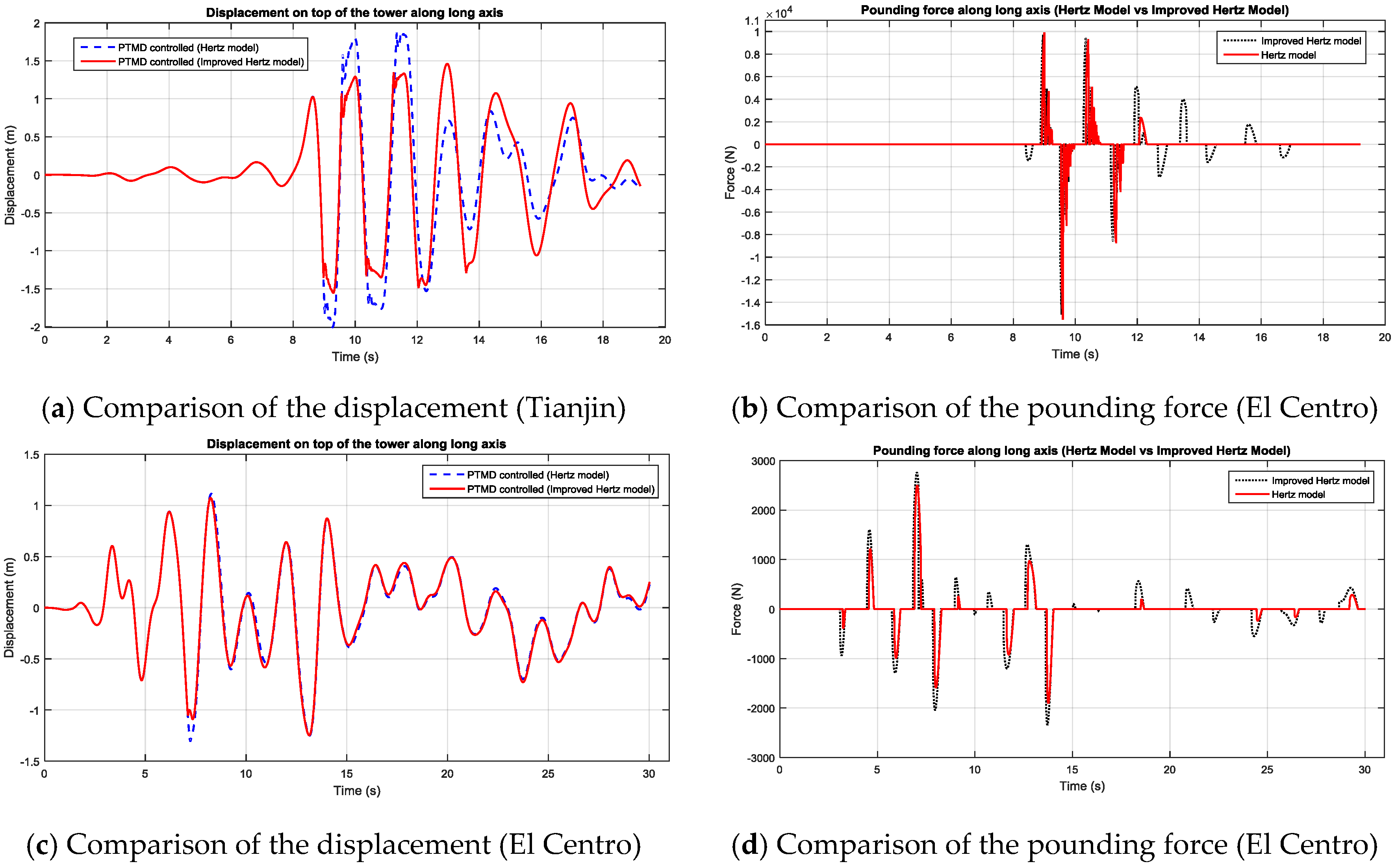
6.4. Control Performance with Improved Hertz Pounding Model
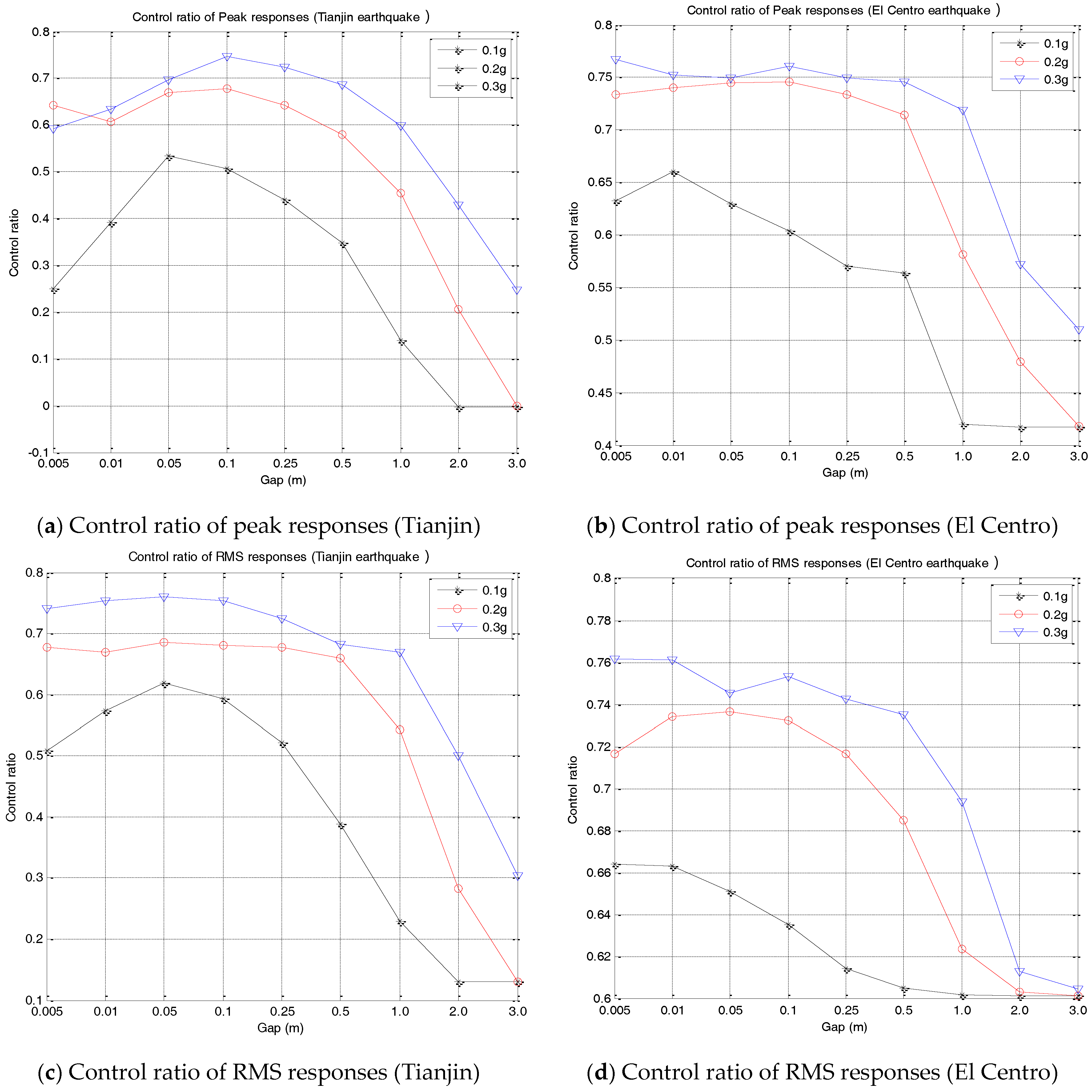
6.5. Parameter Studies
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, Z.; Ou, J.P. Optimization Design of Coupling Beam Metal Damper in Shear Wall Structures. Appl. Sci. 2017, 7, 7020137. [Google Scholar] [CrossRef]
- Weber, F.; Distl, H.; Fischer, S.; Braun, C. MR Damper Controlled Vibration Absorber for Enhanced Mitigation of Harmonic Vibrations. Appl. Sci. 2016, 5, 5040027. [Google Scholar] [CrossRef]
- Jansen, L.M.; Dyke, S.J. Semiactive control strategies for MR dampers: Comparative study. J. Eng. Mech. 2000, 126, 795–803. [Google Scholar] [CrossRef]
- Soong, T.T.; Spencer, B.F., Jr. Supplemental energy dissipation: State-of-the-art and state-of-the-practice. Eng. Struct. 2002, 24, 243–259. [Google Scholar] [CrossRef]
- Lee, C.L.; Chen, Y.T.; Chung, L.L.; Wang, Y.P. Optimal design theories and applications of tuned mass dampers. Eng. Struct. 2006, 28, 43–53. [Google Scholar] [CrossRef]
- Mishra, S.K.; Gur, S.; Chakraborty, S. An improved tuned mass damper (SMA-TMD) assisted by a shape memory alloy spring. Smart Mater. Struct. 2013, 22, 095016. [Google Scholar] [CrossRef]
- Nagarajaiah, S. Adaptive passive, semiactive, smart tuned mass dampers: Identification and control using empirical mode decomposition, hilbert transform, and short-term fourier transform. Struct. Control Health Monit. 2009, 16, 800–841. [Google Scholar] [CrossRef]
- Casado, C.M.; Poncela, A.V.; Lorenzana, A. Adaptive tuned mass damper for the construction of concrete piers. Struct. Eng. Int. 2007, 17, 252–255. [Google Scholar] [CrossRef]
- Occhiuzzi, A.; Spizzuoco, M.; Ricciardelli, F. Loading models and response control of footbridges excited by running pedestrians. Struct. Control Health Monit. 2008, 15, 349–368. [Google Scholar] [CrossRef]
- Weber, B.; Feltrin, G. Assessment of long-term behavior of tuned mass dampers by system identification. Eng. Struct. 2010, 32, 3670–3682. [Google Scholar] [CrossRef]
- Hoang, N.; Fujino, Y.; Warnitchai, P. Optimal tuned mass damper for seismic applications and practical design formulas. Eng. Struct. 2008, 30, 707–715. [Google Scholar] [CrossRef]
- Demetriou, D.; Nikitas, N. A Novel Hybrid Semi-Active Mass Damper Configuration for Structural Applications. Appl. Sci. 2016, 6, 6120397. [Google Scholar] [CrossRef]
- Inaudi, J.A.; Kelly, J.M. Mass damper using friction-dissipating devices. J. Eng. Mech. 1995, 121, 142–149. [Google Scholar] [CrossRef]
- Rüdinger, F. Optimal vibration absorber with nonlinear viscous power law damping and white noise excitation. J. Eng. Mech. 2006, 132, 46–53. [Google Scholar] [CrossRef]
- Rüdinger, F. Tuned mass damper with nonlinear viscous damping. J. Sound Vib. 2007, 300, 932–948. [Google Scholar] [CrossRef]
- Alexander, N.A.; Schilder, F. Exploring the performance of a nonlinear tuned mass damper. J. Sound Vib. 2009, 319, 445–462. [Google Scholar] [CrossRef]
- Kaloop, M.R.; Hu, J.W.; Bigdeli, Y. Identification of the Response of a Controlled Building Structure Subjected to Seismic Load by Using Nonlinear System Models. Appl. Sci. 2016, 6, 6100301. [Google Scholar] [CrossRef]
- Chung, L.L.; Wu, L.Y.; Huang, H.H.; Chang, C.H.; Lien, K.H. Optimal design theories of tuned mass dampers with nonlinear viscous damping. Earthq. Eng. Eng. Vib. 2009, 8, 547–560. [Google Scholar] [CrossRef]
- Ricciardelli, F.; Occhiuzzi, A.; Clemente, P. Semi-active tuned mass damper control strategy for wind-excited structures. J. Wind Eng. Ind. Aerodyn. 2000, 88, 57–74. [Google Scholar] [CrossRef]
- Pinkaew, T.; Fujino, Y. Effectiveness of semi-active tuned mass dampers under harmonic excitation. Eng. Struct. 2001, 23, 850–856. [Google Scholar] [CrossRef]
- Ikeda, Y. Active and semi-active vibration control of buildings in Japan—Practical applications and verification. Struct. Control Health Monit. 2009, 16, 703–723. [Google Scholar] [CrossRef]
- Spencer, B.F., Jr.; Nagarajaiah, S. State of the art of structural control. J. Struct. Eng. (ASCE) 2003, 129, 845–856. [Google Scholar] [CrossRef]
- Li, L.; Song, G.; Ou, J. Hybrid active mass damper (AMD) vibration suppression of nonlinear high-rise structure using fuzzy logic control algorithm under earthquake excitations. Struct. Control Health Monit. 2011, 18, 698–709. [Google Scholar] [CrossRef]
- Gsell, D.; Feltrin, G.; Motavalli, M. Adaptive tuned mass damper based on pre-stressable leaf-springs. J. Intell. Mater. Syst. Struct. 2007, 18, 845–851. [Google Scholar] [CrossRef]
- Rizos, D.; Feltrin, G.; Motavalli, M. Structural identification of a prototype pre-stressable leaf-spring based adaptive tuned mass damper: Nonlinear characterization and classification. Mech. Syst. Signal Proc. 2011, 25, 205–221. [Google Scholar] [CrossRef]
- Williams, K.A.; Chiu, G.C.; Bernhard, R.J. Dynamic modelling of a shape memory alloy adaptive tuned vibration absorber. J. Sound Vib. 2005, 280, 211–234. [Google Scholar] [CrossRef]
- Sun, W.Q.; Li, Q.B. TMD semi-active control with shape memory alloy. J. Harbin Inst. Technol. 2009, 41, 164–168. [Google Scholar] [CrossRef]
- Varadarajan, N.; Nagarajaiah, S. Wind response control of building with variable stiffness tuned mass damper using empirical mode decomposition/Hilbert transform. J. Eng. Mech. 2004, 130, 451–458. [Google Scholar] [CrossRef]
- Nagarajaiah, S.; Varadarajan, N. Short time Fourier transform algorithm for wind response control of buildings with variable stiffness TMD. Eng. Struct. 2005, 27, 431–441. [Google Scholar] [CrossRef]
- Weber, F.; Maślanka, M. Frequency and damping adaptation of a TMD with controlled MR damper. Smart Mater. Struct. 2012, 21, 055011. [Google Scholar] [CrossRef]
- Weber, F.; Boston, C.; Maślanka, M. An adaptive tuned mass damper based on the emulation of positive and negative stiffness with an MR damper. Smart Mater. Struct. 2011, 20, 015012. [Google Scholar] [CrossRef]
- Cai, C.S.; Wu, W.J.; Araujo, M. Cable vibration control with a TMD-MR damper system: Experimental exploration. J. Struct. Eng. 2007, 133, 629–637. [Google Scholar] [CrossRef]
- Eason, R.P.; Sun, C.; Dick, A.J.; Nagarajaiah, S. Attenuation of a linear oscillator using a nonlinear and a semi-active tuned mass damper in series. J. Sound Vib. 2013, 332, 154–166. [Google Scholar] [CrossRef]
- Zhang, P.; Song, G.; Li, H.N.; Lin, Y.X. Seismic Control of Power Transmission Tower Using Pounding TMD. J. Eng. Mech. 2012, 139, 1395–1406. [Google Scholar] [CrossRef]
- Lankarani, H.M.; Nikravesh, P.E. A contact force model with hysteresis damping for impact analysis of multibody systems. J. Mech. Des. 1990, 112, 369–376. [Google Scholar] [CrossRef]
- Lankarani, H.M.; Nikravesh, P.E. Continuous contact force models for impact analysis in multibody systems. Nonlinear Dyn. 1994, 5, 193–207. [Google Scholar]
- Wasfy, T.M.; Noor, A.K. Computational strategies for flexible multibody systems. Appl. Mech. Rev. 2003, 56, 553–613. [Google Scholar] [CrossRef]
- Schwab, A.L.; Meijaard, J.P.; Meijers, P. A comparison of revolute joint clearance models in the dynamic analysis of rigid and elastic mechanical systems. Mech. Mach. Theory 2002, 37, 895–913. [Google Scholar] [CrossRef]
- Pereira, C.M.; Ambrósio, J.A.; Ramalho, A.L. A methodology for the generation of planar models for multibody chain drives. Multibody Syst. Dyn. 2010, 24, 303–324. [Google Scholar] [CrossRef]
- Gonthier, Y.; Mcphee, J.; Lange, C.; Piedbceuf, J.C. A Regularized Contact Model with Asymmetric Damping and Dwell-Time Dependent Friction. Multibody Syst. Dyn. 2004, 11, 209–233. [Google Scholar] [CrossRef]
- Flores, P.; Ambrósio, J.; Claro, J.P.; Lankarani, H.M. Dynamic behaviour of planar rigid multi-body systems including revolute joints with clearance. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2007, 221, 161–174. [Google Scholar] [CrossRef]
- Flores, P.; Machado, M.; Silva, M.T.; Martins, J.M. On the continuous contact force models for soft materials in multibody dynamics. Multibody Syst. Dyn. 2011, 25, 357–375. [Google Scholar] [CrossRef]
- Ni, Y.Q.; Xia, Y.; Lin, W.; Chen, W.H.; Ko, K.M. SHM benchmark for high-rise structures: A reduced-order finite element model and field measurement data. Smart Mater. Struct. 2012, 10, 411–426. [Google Scholar] [CrossRef]
- Chen, W.H.; Lu, Z.R.; Lin, W.; Chen, S.H.; Ni, Y.Q.; Xia, Y.; Liao, W.Y. Theoretical and experimental modal analysis of the Guangzhou New TV Tower. Eng. Struct. 2011, 33, 3628–3646. [Google Scholar] [CrossRef]
- Li, Q.S.; Fang, J.Q.; Jeary, A.P.; Wong, C.K.; Liu, D.K. Evaluation of wind effects on a supertall building based on full-scale measurements. Earthq. Eng. Struct. Dyn. 2000, 29, 1845–1862. [Google Scholar] [CrossRef]
- Lin, W.; Lin, Y.; Song, G.; Li, J. Multiple Pounding Tuned Mass Damper (MPTMD) control on benchmark tower subjected to earthquake excitations. Earthq. Struct. 2016, 11, 1123–1141. [Google Scholar]
- Zhang, H.Y.; Zhang, L.J. Tuned Mass Damper System of High-rise Intake Towers Optimized by Improved Harmony Search Algorithm. Eng. Struct. 2017, 138, 270–282. [Google Scholar] [CrossRef]
- Yaguchi, T.; Kurino, H.; Kano, N.; Nakai, T.; Fukuda, R. Development of large tuned mass damper with stroke control system for seismic upgrading of existing high-rise building. Int. J. High Rise Build. 2016, 5, 167–176. [Google Scholar] [CrossRef]
- Rana, R.; Soong, T.T. Parametric study and simplified design of tuned mass dampers. Eng. Struct. 1998, 20, 193–204. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | ||||
|---|---|---|---|---|
| value | 10,560 | 0.8 | 1.3 | 1.1 |
| Mode | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| Frequency (Hz) | 0.110 | 0.159 | 0.347 | 0.368 | 0.399 |
| Mode | 6 | 7 | 8 | 9 | 10 |
| Frequency (Hz) | 0.460 | 0.485 | 0.738 | 0.902 | 0.997 |
| Responses | Uncontrolled | TMD Controlled | PTMD Controlled | |
|---|---|---|---|---|
| Mast top (long axis) | Peak displacement (m) | 0.802 | 0.637 | 0.636 |
| RMS displacement (m) | 0.278 | 0.238 | 0.238 | |
| Peak acceleration (m/s2) | 3.138 | 2.375 | 2.346 | |
| RMS acceleration (m/s2) | 0.987 | 0.788 | 0.781 | |
| Tower top (long axis) | Peak displacement (m) | 0.126 | 0.092 | 0.092 |
| RMS displacement (m) | 0.044 | 0.034 | 0.034 | |
| Peak acceleration (m/s2) | 0.065 | 0.053 | 0.053 | |
| RMS acceleration (m/s2) | 0.023 | 0.018 | 0.018 | |
| Mast top (short axis) | Peak displacement (m) | 0.502 | 0.397 | 0.396 |
| RMS displacement (m) | 0.190 | 0.150 | 0.150 | |
| Peak acceleration (m/s2) | 2.288 | 1.558 | 1.543 | |
| RMS acceleration (m/s2) | 0.758 | 0.526 | 0.522 | |
| Tower top (short axis) | Peak displacement (m) | 0.036 | 0.032 | 0.032 |
| RMS displacement (m) | 0.014 | 0.012 | 0.012 | |
| Peak acceleration (m/s2) | 0.019 | 0.022 | 0.022 | |
| RMS acceleration (m/s2) | 0.008 | 0.008 | 0.008 | |
| Responses | Uncontrolled | TMD Controlled | PTMD Controlled | |
|---|---|---|---|---|
| Mast top (long axis) | Peak displacement (m) | 1.128 | 0.742 | 0.736 |
| RMS displacement (m) | 0.376 | 0.251 | 0.251 | |
| Peak acceleration (m/s2) | 5.445 | 3.913 | 3.857 | |
| RMS acceleration (m/s2) | 1.713 | 1.155 | 1.145 | |
| Tower top (long axis) | Peak displacement (m) | 0.081 | 0.064 | 0.064 |
| RMS displacement (m) | 0.028 | 0.022 | 0.022 | |
| Peak acceleration (m/s2) | 0.070 | 0.065 | 0.065 | |
| RMS acceleration (m/s2) | 0.023 | 0.018 | 0.018 | |
| Mast top (short axis) | Peak displacement (m) | 0.726 | 0.491 | 0.487 |
| RMS displacement (m) | 0.271 | 0.164 | 0.164 | |
| Peak acceleration (m/s2) | 3.558 | 2.662 | 2.623 | |
| RMS acceleration (m/s2) | 1.289 | 0.773 | 0.766 | |
| Tower top (short axis) | Peak displacement (m) | 0.039 | 0.033 | 0.033 |
| RMS displacement (m) | 0.012 | 0.010 | 0.010 | |
| Peak acceleration (m/s2) | 0.031 | 0.037 | 0.037 | |
| RMS acceleration (m/s2) | 0.011 | 0.012 | 0.012 | |
| Responses | Uncontrolled | TMD Controlled | PTMD Controlled | |
|---|---|---|---|---|
| Mast top (long axis) | Peak displacement (m) | 0.662 | 0.280 | 0.276 |
| RMS displacement (m) | 0.203 | 0.102 | 0.101 | |
| Peak acceleration (m/s2) | 3.976 | 3.170 | 3.139 | |
| RMS acceleration (m/s2) | 1.068 | 0.935 | 0.929 | |
| Tower top (long axis) | Peak displacement (m) | 0.042 | 0.026 | 0.026 |
| RMS displacement (m) | 0.014 | 0.009 | 0.009 | |
| Peak acceleration (m/s2) | 0.043 | 0.037 | 0.037 | |
| RMS acceleration (m/s2) | 0.013 | 0.011 | 0.011 | |
| Mast top (short axis) | Peak displacement (m) | 0.691 | 0.305 | 0.301 |
| RMS displacement (m) | 0.213 | 0.105 | 0.104 | |
| Peak acceleration (m/s2) | 4.253 | 3.359 | 3.323 | |
| RMS acceleration (m/s2) | 1.130 | 0.955 | 0.949 | |
| Tower top (short axis) | Peak displacement (m) | 0.031 | 0.020 | 0.020 |
| RMS displacement (m) | 0.011 | 0.008 | 0.008 | |
| Peak acceleration (m/s2) | 0.029 | 0.027 | 0.027 | |
| RMS acceleration (m/s2) | 0.009 | 0.008 | 0.008 | |
| Excitation | Uncontrolled | TMD | PTMD Gap (m) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.005 | 0.01 | 0.05 | 0.1 | 0.25 | 0.5 | 1 | 2 | 3 | |||||
| TJ | 0.1 g | Peak | 2.203 | 2.209 | 1.655 | 1.341 | 1.029 | 1.087 | 1.233 | 1.436 | 1.895 | 2.208 | 2.209 |
| RMS | 0.883 | 0.768 | 0.434 | 0.377 | 0.336 | 0.360 | 0.423 | 0.540 | 0.680 | 0.768 | 0.768 | ||
| 0.2 g | Peak | 3.672 | 3.682 | 1.543 | 1.442 | 1.210 | 1.181 | 1.313 | 1.545 | 2.005 | 2.920 | 3.677 | |
| RMS | 1.472 | 1.281 | 0.531 | 0.487 | 0.464 | 0.470 | 0.475 | 0.501 | 0.673 | 1.055 | 1.279 | ||
| 0.3 g | Peak | 5.141 | 5.155 | 2.098 | 1.878 | 1.564 | 1.304 | 1.422 | 1.614 | 2.062 | 2.932 | 3.868 | |
| RMS | 2.060 | 1.792 | 0.534 | 0.506 | 0.493 | 0.507 | 0.566 | 0.655 | 0.681 | 1.030 | 1.436 | ||
| EC | 0.1 g | Peak | 3.068 | 1.787 | 1.128 | 1.042 | 1.136 | 1.217 | 1.317 | 1.337 | 1.781 | 1.787 | 1.787 |
| RMS | 1.252 | 0.499 | 0.420 | 0.422 | 0.437 | 0.457 | 0.483 | 0.494 | 0.498 | 0.499 | 0.499 | ||
| 0.2 g | Peak | 5.114 | 2.979 | 1.334 | 1.329 | 1.303 | 1.301 | 1.363 | 1.464 | 2.140 | 2.662 | 2.977 | |
| RMS | 2.087 | 0.831 | 0.555 | 0.555 | 0.550 | 0.558 | 0.592 | 0.657 | 0.785 | 0.828 | 0.831 | ||
| 0.3 g | Peak | 7.160 | 4.170 | 1.670 | 1.773 | 1.794 | 1.718 | 1.792 | 1.820 | 2.013 | 3.064 | 3.507 | |
| RMS | 2.922 | 1.164 | 0.697 | 0.698 | 0.743 | 0.721 | 0.752 | 0.773 | 0.894 | 1.130 | 1.155 | ||
| Excitation | Terms | Uncontrolled | TMD | PTMD | |||||
|---|---|---|---|---|---|---|---|---|---|
| 200 t | 300 t | 500 t | 200 t | 300 t | 500 t | ||||
| Tianjin | 0.1 g | Peak (m) | 2.203 | 2.209 | 2.150 | 1.924 | 1.029 | 1.024 | 1.047 |
| RMS (m) | 0.883 | 0.768 | 0.660 | 0.508 | 0.336 | 0.329 | 0.335 | ||
| 0.2 g | Peak (m) | 3.672 | 3.682 | 3.584 | 3.207 | 1.210 | 1.098 | 1.103 | |
| RMS (m) | 1.472 | 1.281 | 1.100 | 0.847 | 0.464 | 0.466 | 0.469 | ||
| 0.3 g | Peak (m) | 5.141 | 5.155 | 5.016 | 4.490 | 1.564 | 1.161 | 1.094 | |
| RMS (m) | 2.060 | 1.792 | 1.540 | 1.185 | 0.493 | 0.507 | 0.517 | ||
| El Centro | 0.1 g | Peak (m) | 3.068 | 1.787 | 1.383 | 0.924 | 1.136 | 1.246 | 0.908 |
| RMS (m) | 1.252 | 0.499 | 0.422 | 0.330 | 0.437 | 0.410 | 0.329 | ||
| 0.2 g | Peak (m) | 5.114 | 2.979 | 2.305 | 1.541 | 1.303 | 1.379 | 1.402 | |
| RMS (m) | 2.087 | 0.831 | 0.703 | 0.551 | 0.550 | 0.561 | 0.515 | ||
| 0.3 g | Peak (m) | 7.160 | 4.170 | 3.227 | 2.157 | 1.794 | 2.025 | 1.618 | |
| RMS (m) | 2.922 | 1.164 | 0.984 | 0.771 | 0.743 | 0.760 | 0.642 | ||
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, W.; Song, G.; Chen, S. PTMD Control on a Benchmark TV Tower under Earthquake and Wind Load Excitations. Appl. Sci. 2017, 7, 425. https://doi.org/10.3390/app7040425
Lin W, Song G, Chen S. PTMD Control on a Benchmark TV Tower under Earthquake and Wind Load Excitations. Applied Sciences. 2017; 7(4):425. https://doi.org/10.3390/app7040425
Chicago/Turabian StyleLin, Wei, Gangbing Song, and Shanghong Chen. 2017. "PTMD Control on a Benchmark TV Tower under Earthquake and Wind Load Excitations" Applied Sciences 7, no. 4: 425. https://doi.org/10.3390/app7040425
APA StyleLin, W., Song, G., & Chen, S. (2017). PTMD Control on a Benchmark TV Tower under Earthquake and Wind Load Excitations. Applied Sciences, 7(4), 425. https://doi.org/10.3390/app7040425