Broken Rotor Bar Detection in LS-PMSM Based on Startup Current Analysis Using Wavelet Entropy Features

 , and
, and
Abstract
:1. Introduction
2. Background and Methodology
- The population means of the first factor (motor condition) are equal;
- The population means of the second factor (load) are equal;
- There is no interaction between the two factors (motor condition and load).
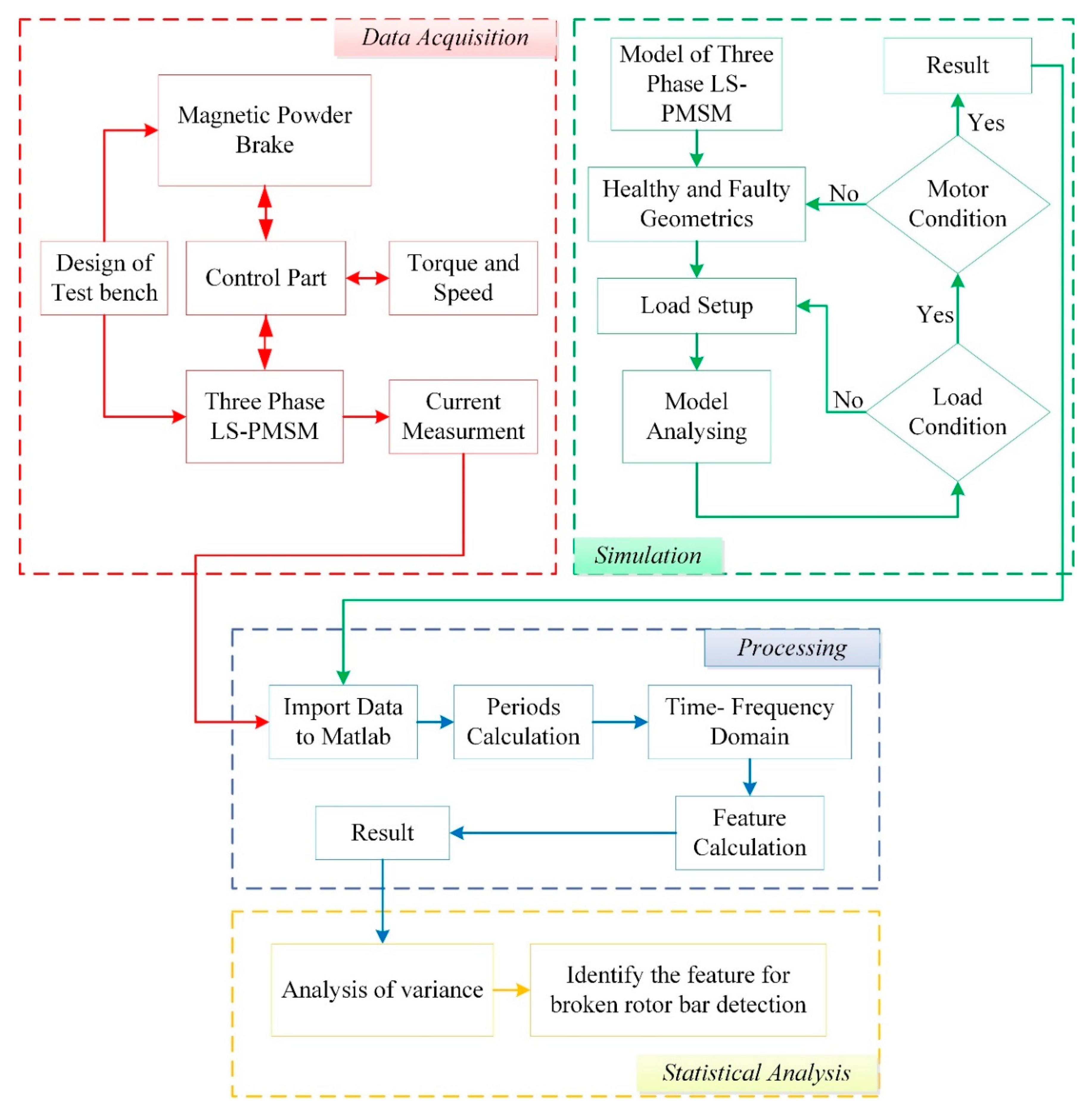
3. Simulation and Experiment Process
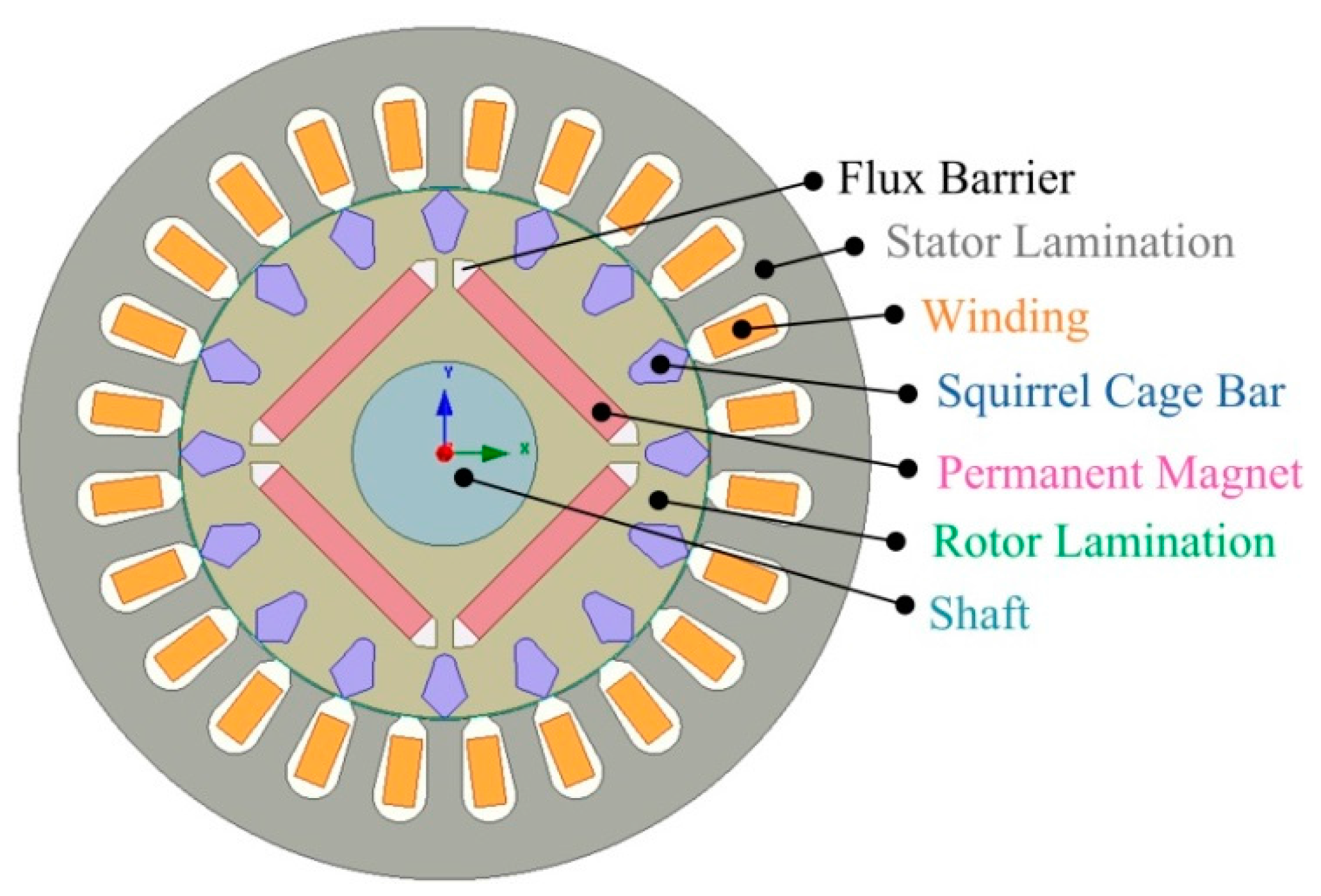
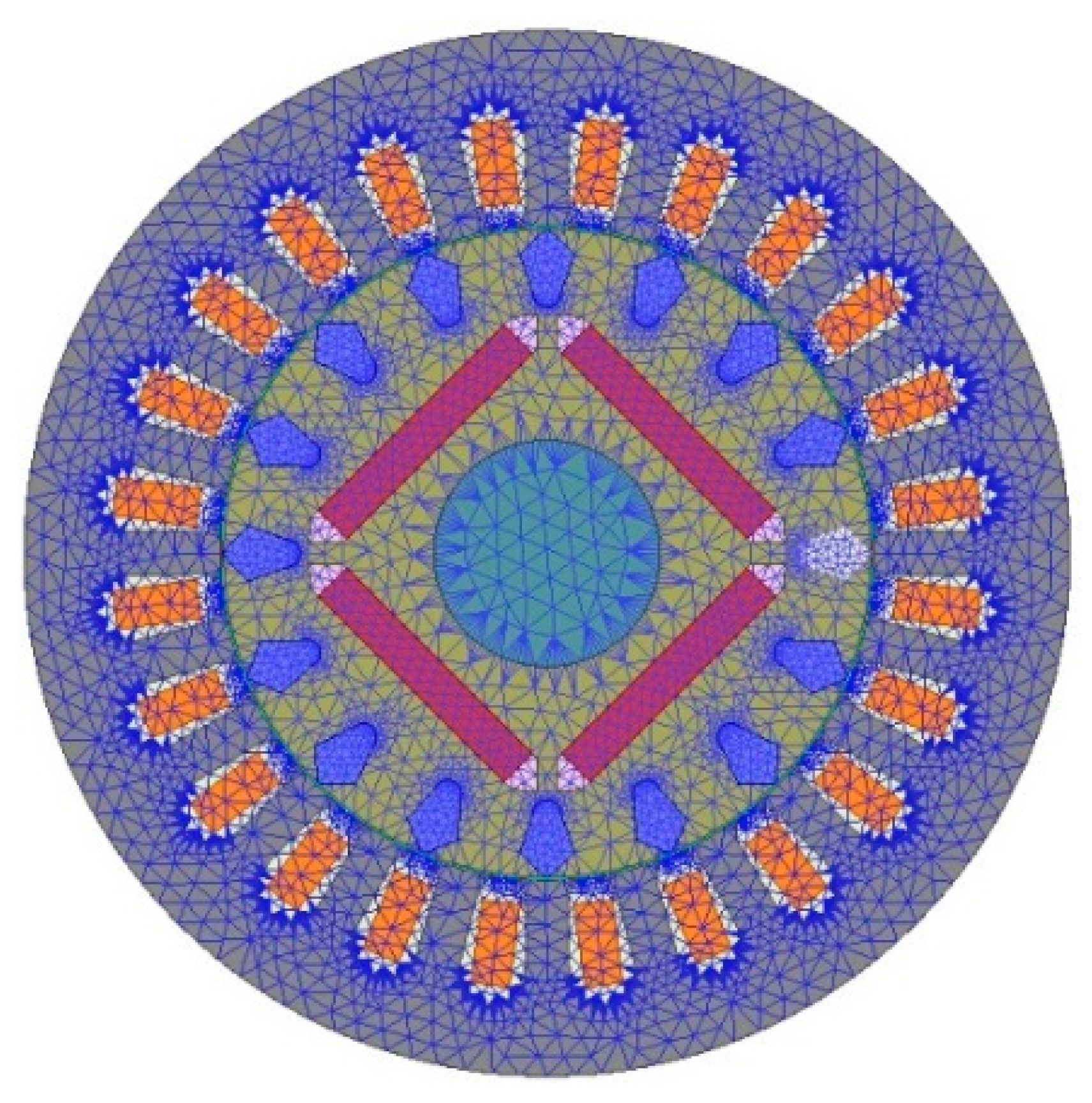
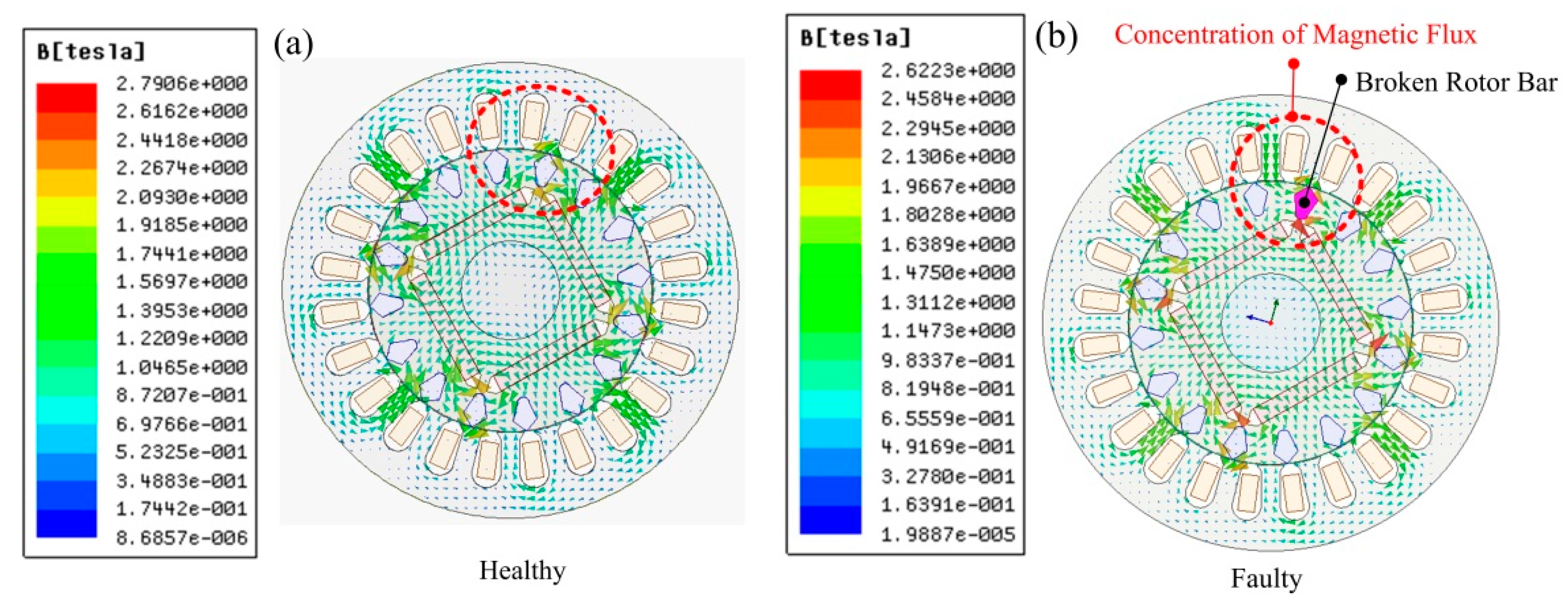
3.1. Simulation
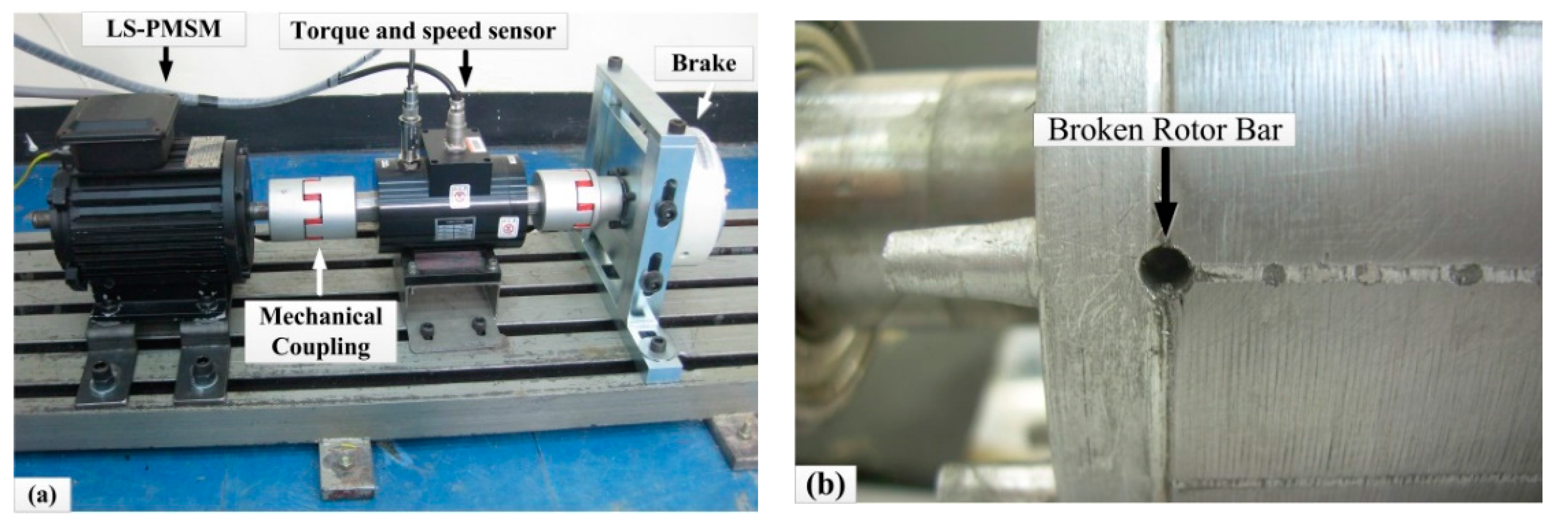
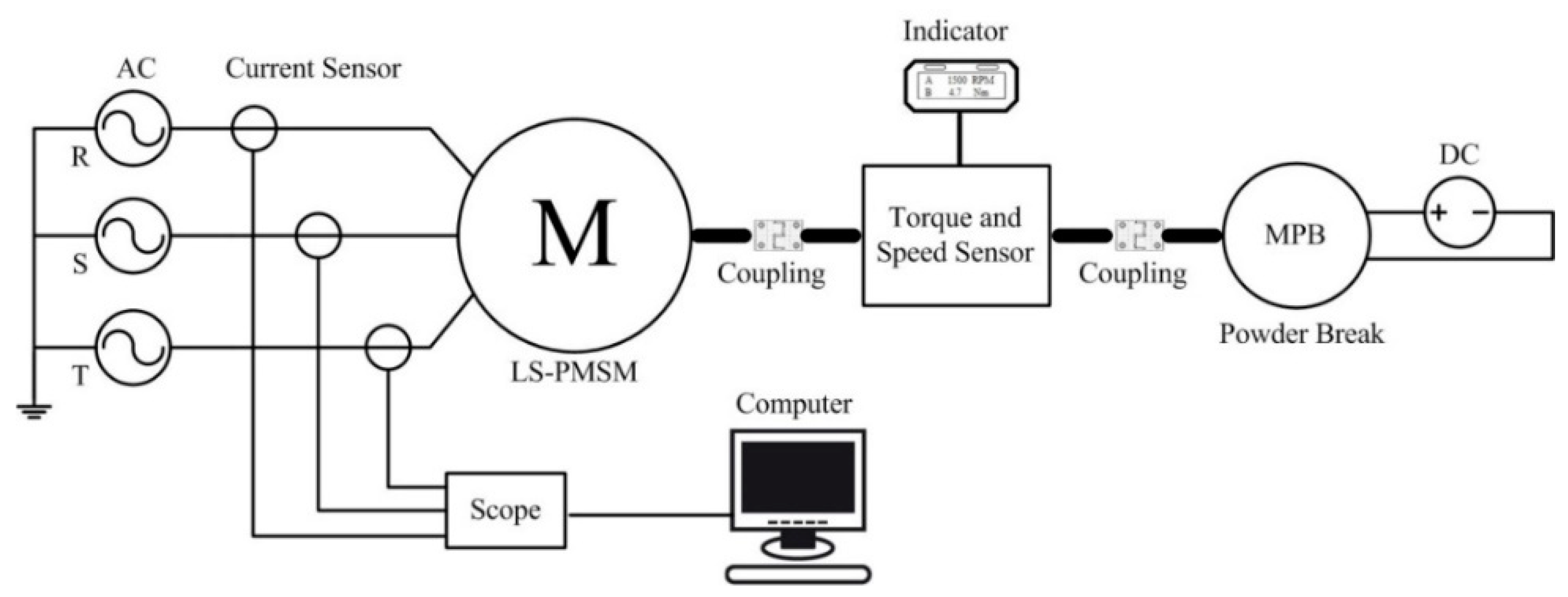
3.2. Experimental and Signal Capturing
4. Result and Discussion
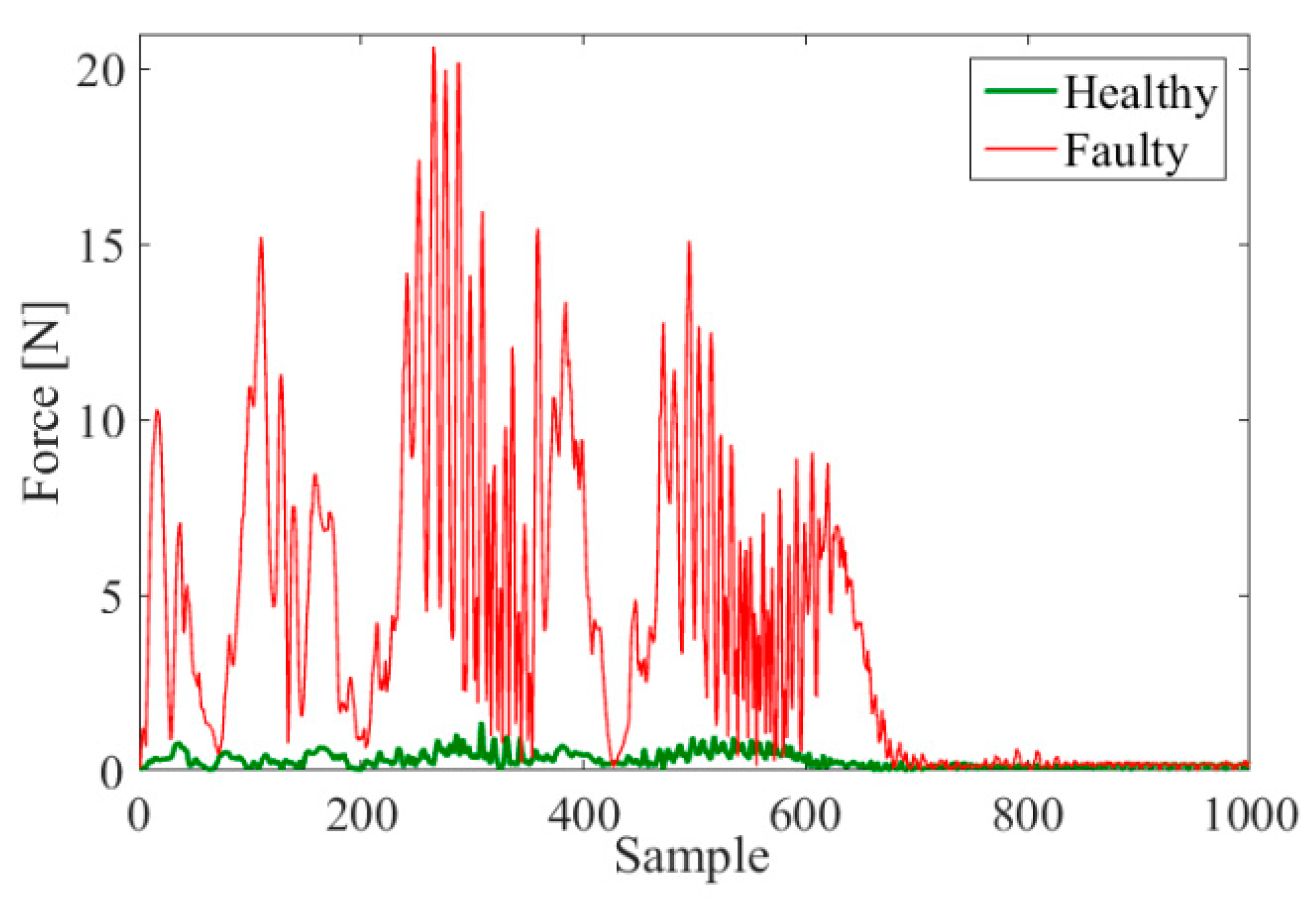
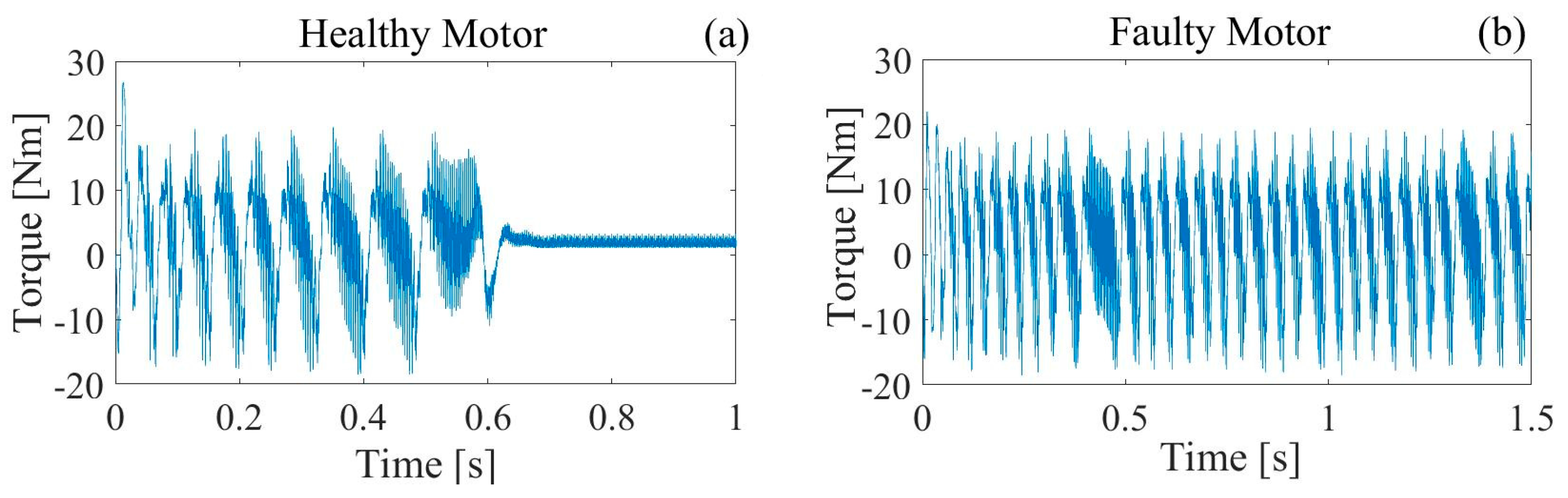
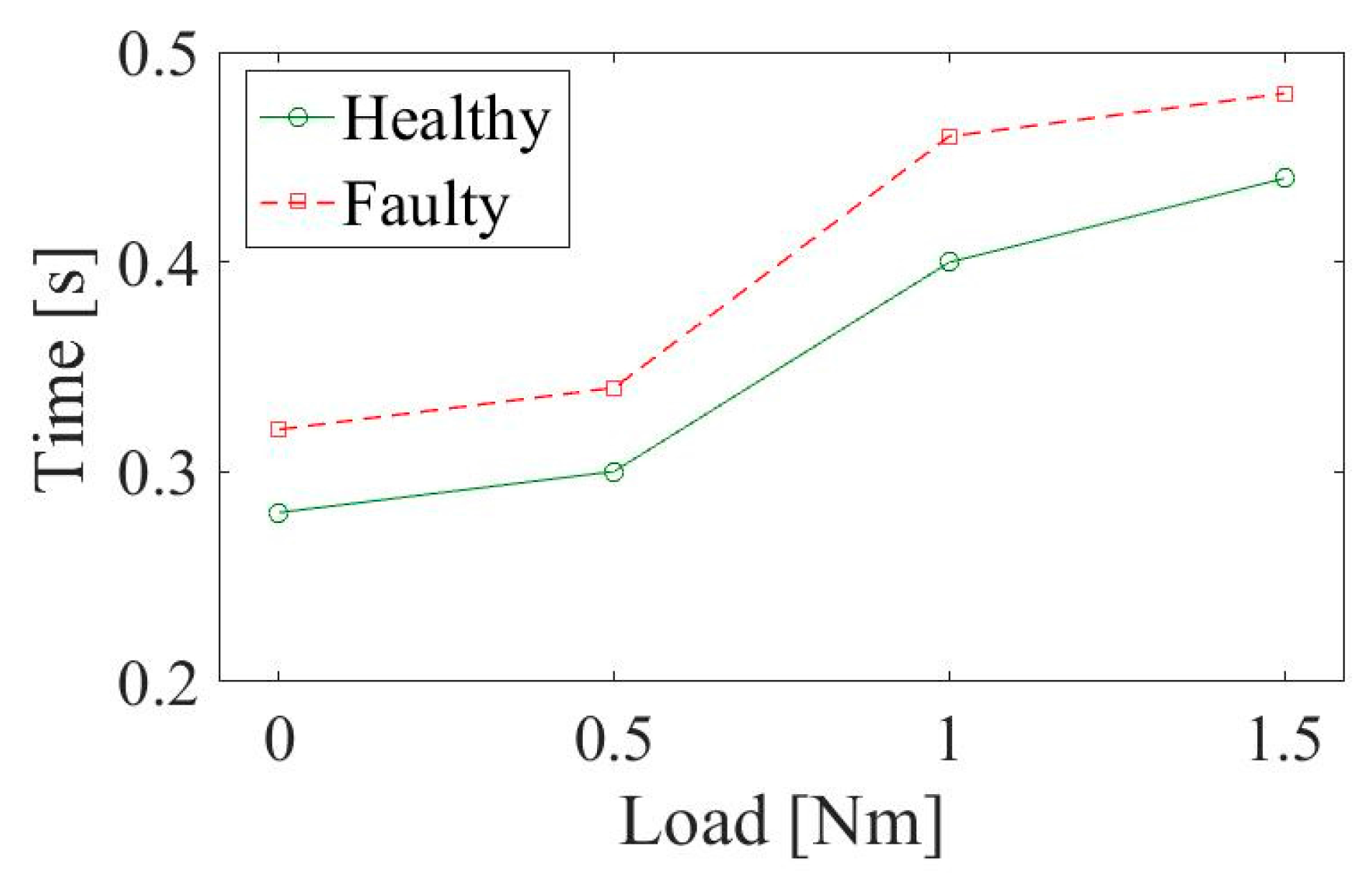
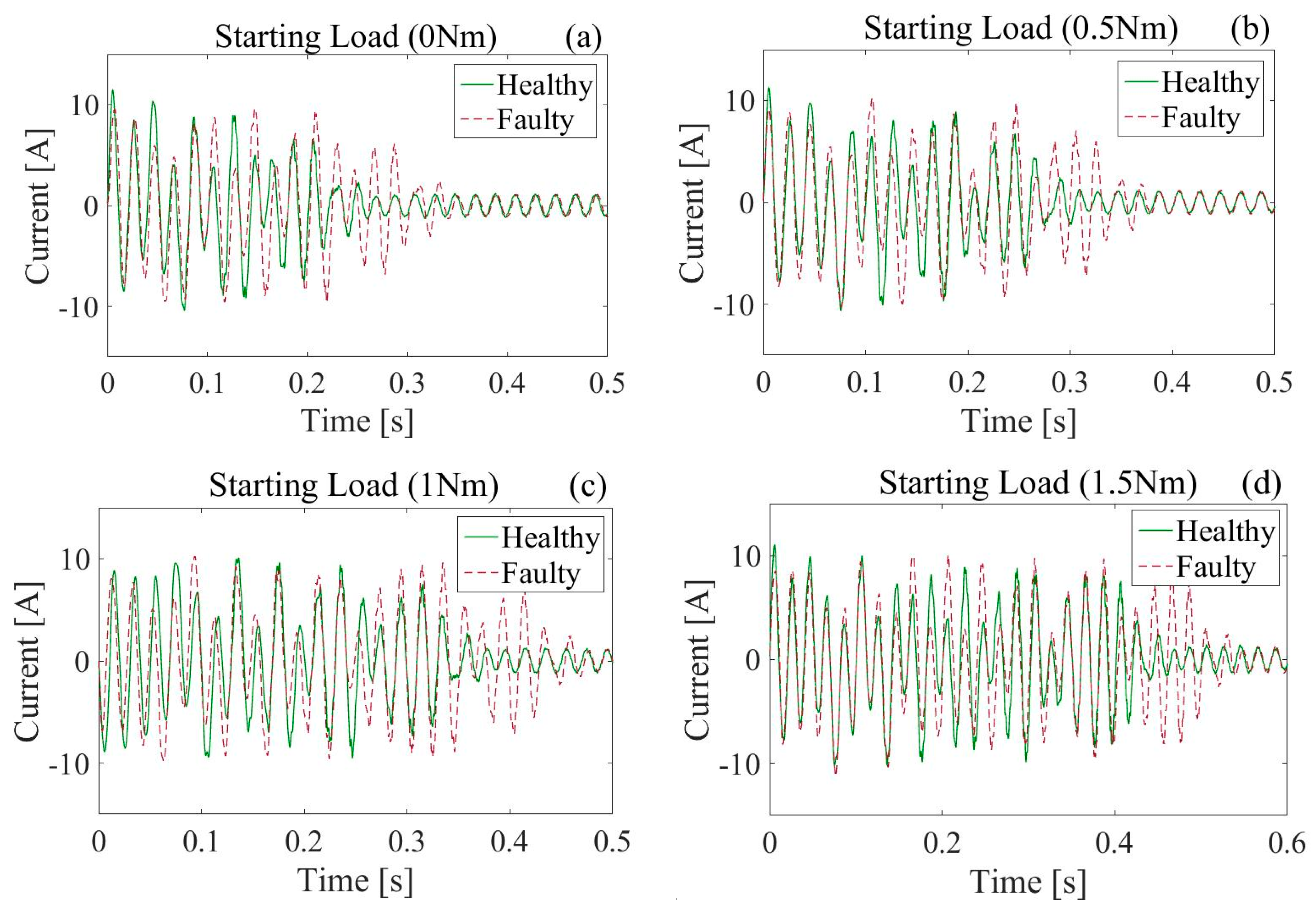
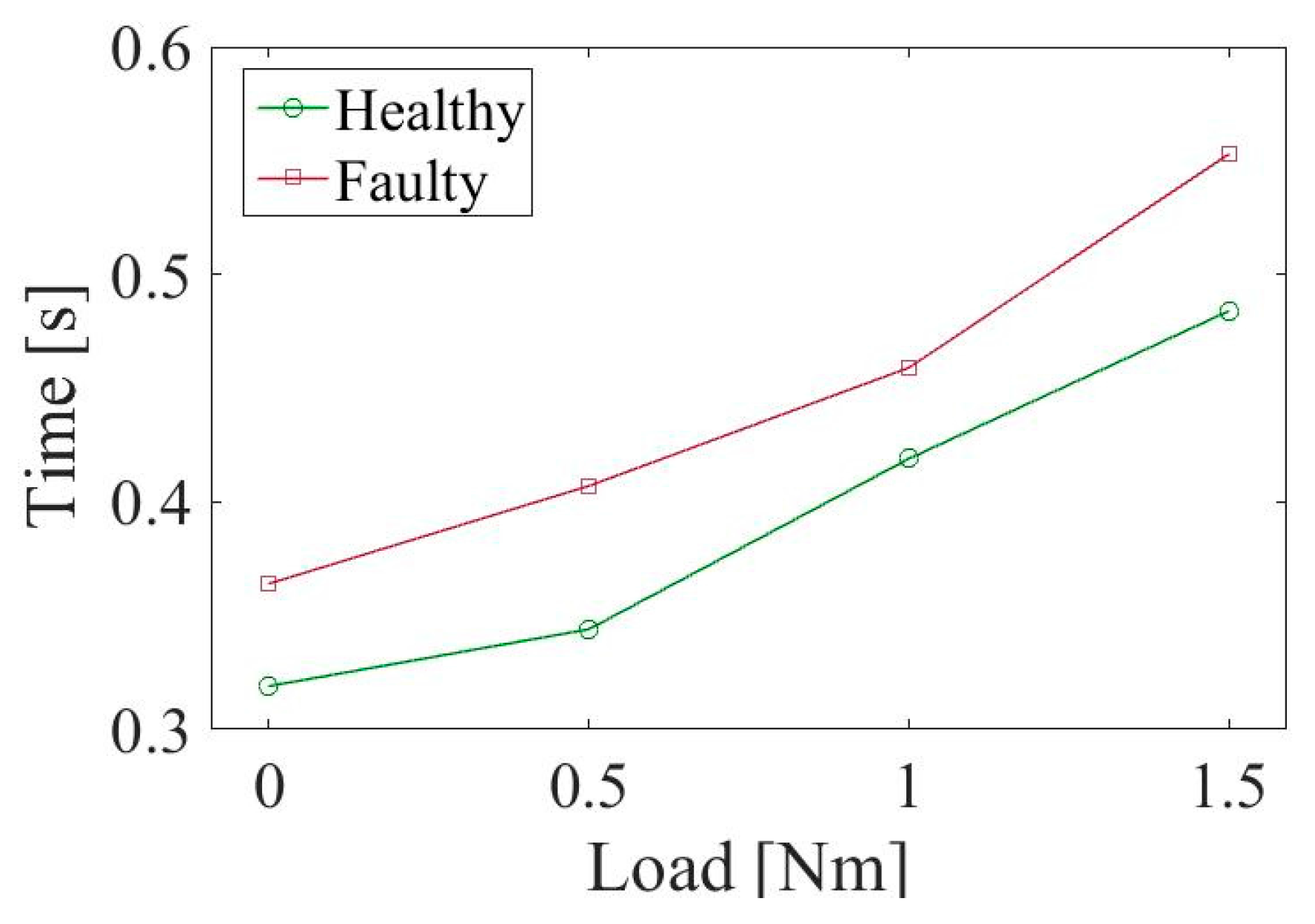
4.1. Performance of LS-PMSM with Presence of Fault
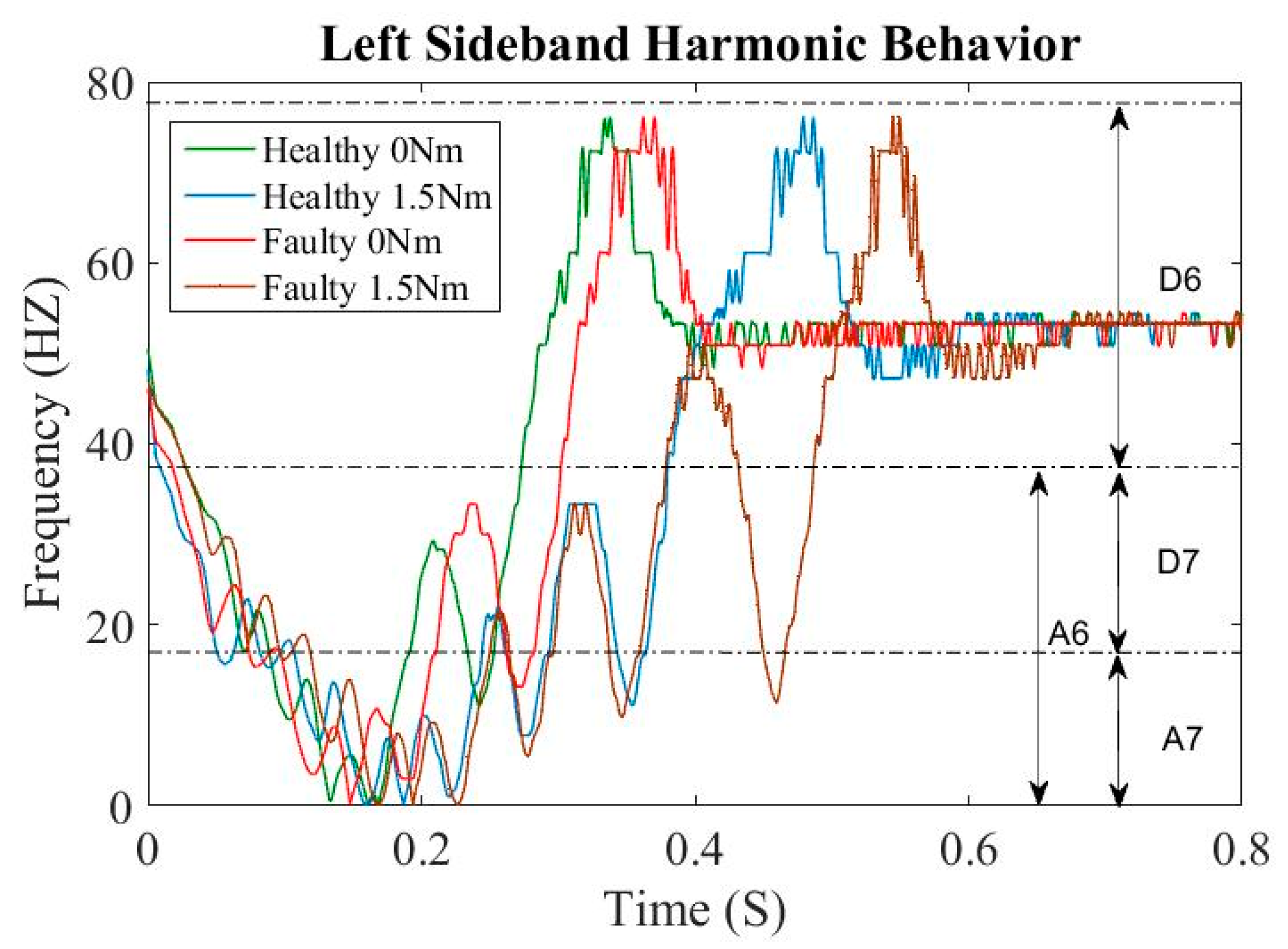
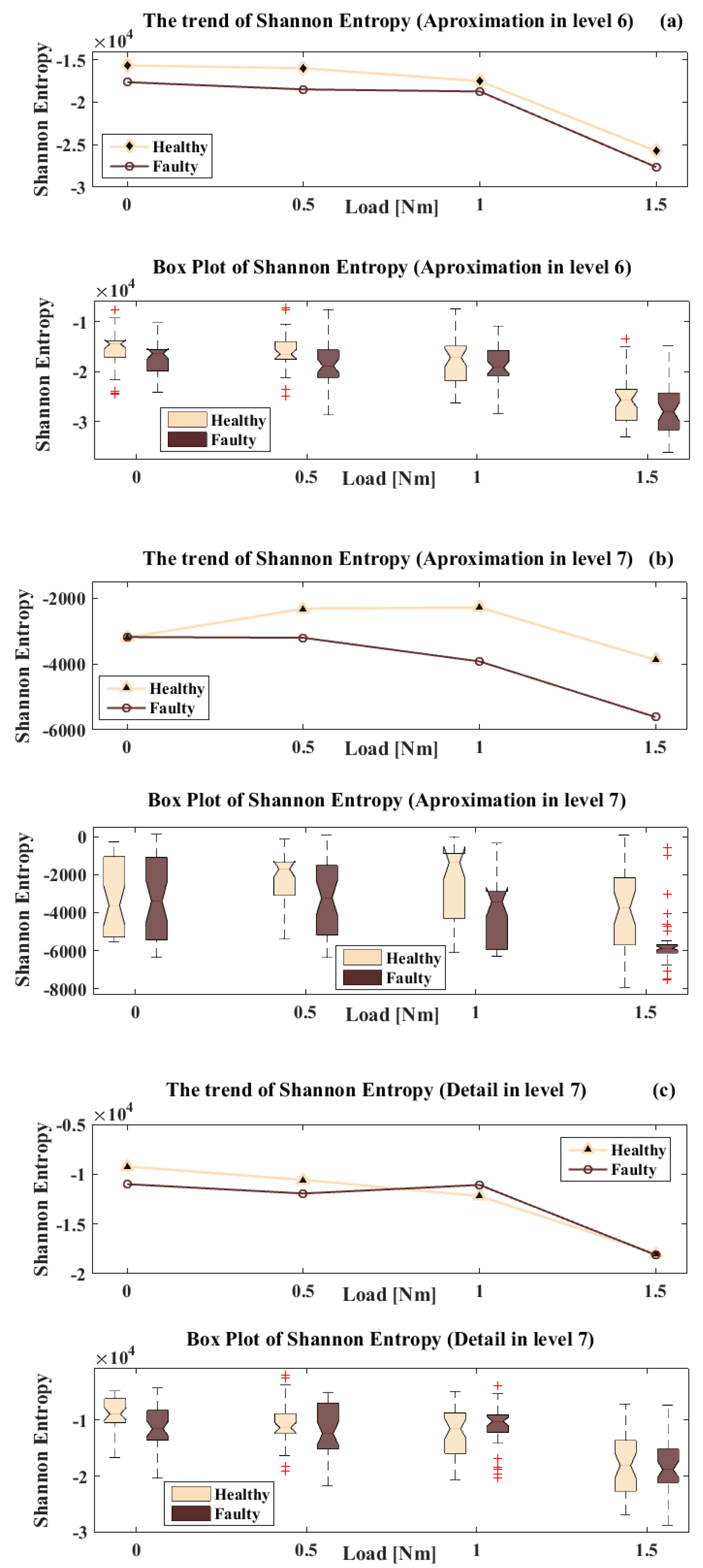
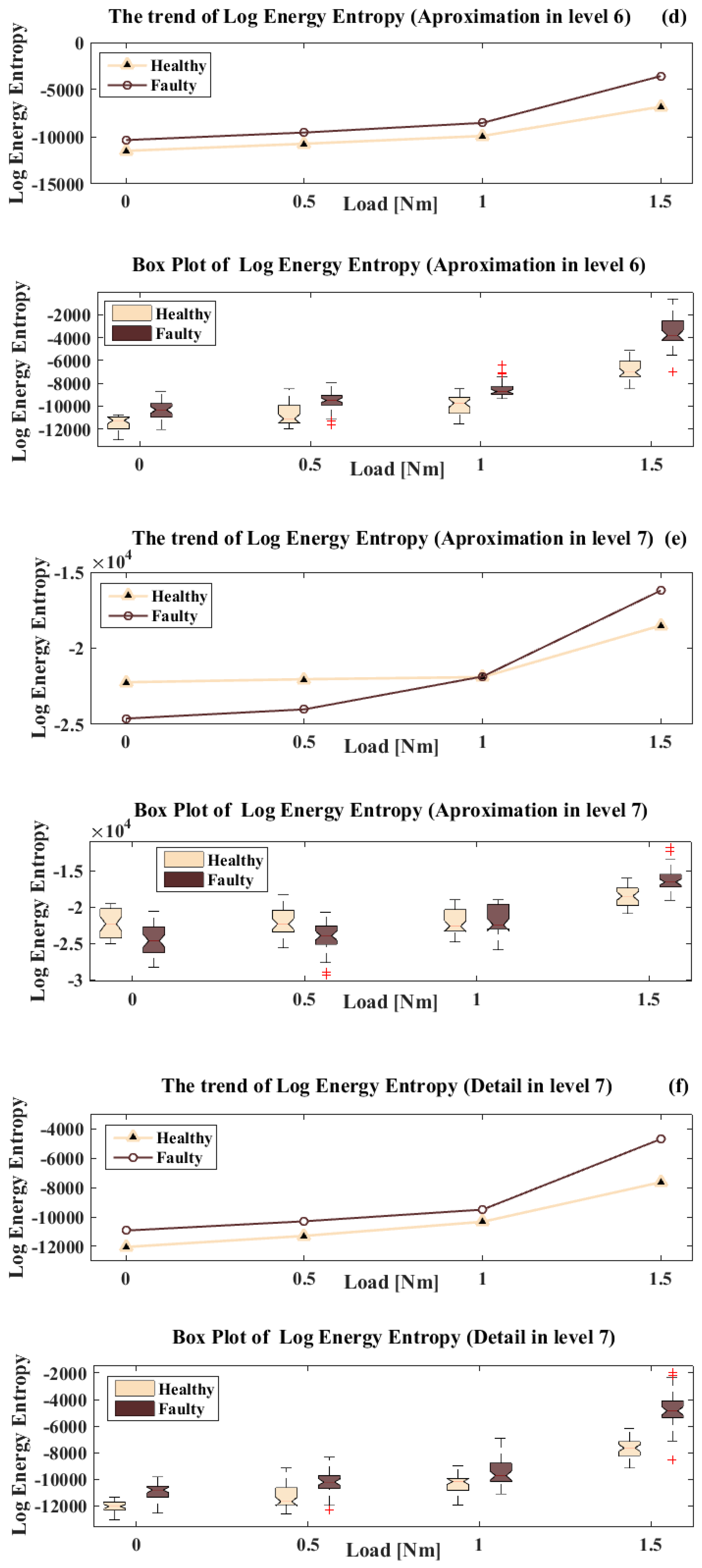
4.2. Fault Related Feature Evaluation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Toliyat, H.A.; Kliman, G.B. Handbook of Electric Motors; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- WEG. WQuattro-Super Premium Efficiency Motor; WEG Industries: Jaraguá do Sul, Santa Catarina, Brazil, 2015. [Google Scholar]
- Pyrhonen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Mehrjou, M.R.; Mariun, N.; Marhaban, M.H.; Misron, N. Rotor fault condition monitoring techniques for squirrel-cage induction machine—A review. Mech. Syst. Signal Process. 2011, 25, 2827–2848. [Google Scholar] [CrossRef]
- Liu, Y.; Bazzi, A.M. A review and comparison of fault detection and diagnosis methods for squirrel—Cage induction motors: State of the art. ISA Trans. 2017. [Google Scholar] [CrossRef] [PubMed]
- Akçay, H.; Germen, E. Subspace-based identification of acoustic noise spectra in induction motors. IEEE Trans. Energy Convers. 2015, 30, 32–40. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Spyropoulos, D.V.; Kappatou, J.C.; Mitronikas, E.D. A novel approach for broken bar fault diagnosis in induction motors through torque monitoring. IEEE Trans. Energy Convers. 2013, 28, 267–277. [Google Scholar] [CrossRef]
- Georgoulas, G.; Climente-Alarcon, V.; Antonino-Daviu, J.A.; Tsoumas, I.P.; Stylios, C.D.; Arkkio, A.; Nikolakopoulos, G. The Use of a Multilabel Classification Framework for the Detection of Broken Bars and Mixed Eccentricity Faults Based on the Start-Up Transient. IEEE Trans. Ind. Inform. 2017, 13, 625–634. [Google Scholar] [CrossRef]
- Mirzaeva, G.; Saad, K.I.; Jahromi, M.G. Comprehensive Diagnostics of Induction Motor Faults Based on Measurement of Space and Time Dependencies of Air Gap Flux. IEEE Trans. Ind. Appl. 2017, 53, 2657–2666. [Google Scholar] [CrossRef]
- Gu, F.; Yesilyurt, I.; Li, Y.; Harris, G.; Ball, A. An Investigation of the Effects of Measurement Noise in the Use of Instantaneous Angular Speed for Machine Diagnosis. Mech. Syst. Signal Process. 2006, 20, 1444–1460. [Google Scholar] [CrossRef]
- Drif, M.H.; Kim, H.; Kim, J.; Lee, S.B.; Cardoso, A.J.M. Active and Reactive Power Spectra-Based Detection and Separation of Rotor Faults and Low-Frequency Load Torque Oscillations. IEEE Trans. Ind. Appl. 2017, 53, 2702–2710. [Google Scholar] [CrossRef]
- Penrose, H.W. Estimating motor life using motor circuit analysis predictive measurements: Part 2. In Proceedings of the IEEE International Symposium on Electrical Insulation, Indianapolis, IN, USA, 19–22 September 2004; pp. 15–17. [Google Scholar]
- Picazo-Ródenas, M.J.; Antonino-Daviu, J.; Climente-Alarcon, V.; Royo-Pastor, R.; Mota-Villar, A. Combination of Noninvasive Approaches for General Assessment of Induction Motors. IEEE Trans. Ind. Appl. 2015, 51, 2172–2180. [Google Scholar] [CrossRef]
- Martinez, J.; Belahcen, A.; Muetze, A. Analysis of the Vibration Magnitude of an Induction Motor with Different Numbers of Broken Bars. IEEE Trans. Ind. Appl. 2017, 53, 2711–2720. [Google Scholar] [CrossRef]
- Hou, Z.; Huang, J.; Liu, H.; Ye, M.; Liu, Z.; Yang, J. Diagnosis of Broken Rotor Bar Fault in Open-and Closed-Loop Controlled wye-Connected Induction Motors Using Zero-Sequence Voltage. IET Electr. Power Appl. 2017, 11, 1214–1223. [Google Scholar] [CrossRef]
- Mirafzal, B. Incipient Fault Diagnosis in Squirrel-Cage Induction Motors. Ph.D. Thesis, Marquette University, Milwaukee, WI, USA, 2005. [Google Scholar]
- Bangura, J.F.; Demerdash, N.A. Diagnosis and Characterization of Effects of Broken Bars and Connectors in Squirrel-Cage Induction Motors by a Time-Stepping Coupled Finite Element-State Space Modeling Approach. IEEE Trans. Energy Convers. 1999, 14, 1167–1176. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.A.; Climente-Alarcón, V.; Pons-Llinares, J.; Puche, R.; Pineda-Sánchez, M. Transient-Based Analysis for The Detection of Broken Damper Bars in Synchronous Motors. Mech. Syst. Signal Process. 2013, 34, 367–377. [Google Scholar] [CrossRef]
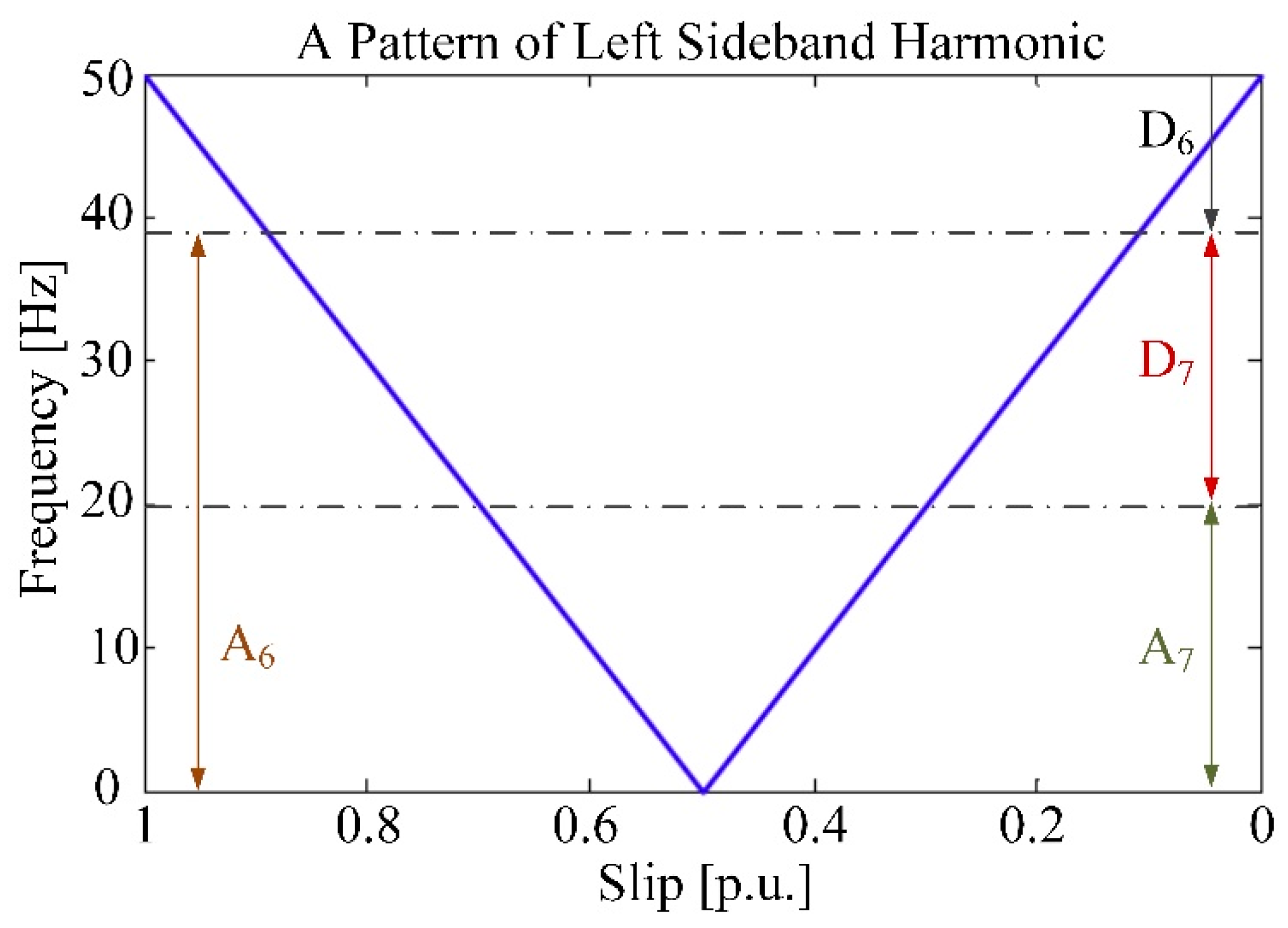
- Pineda-Sanchez, M.; Riera-Guasp, M.; Antonino-Daviu, J.A.; Roger-Folch, J.; Perez-Cruz, J.; Puche-Panadero, R. Instantaneous Frequency of the Left Sideband Harmonic During the Start-Up Transient: A New Method for Diagnosis of Broken Bars. IEEE Trans. Ind. Electron. 2009, 56, 4557–4570. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X.; Chen, X. Wavelets for fault diagnosis of rotary machines: A review with applications. Signal Process. 2014, 96, 1–15. [Google Scholar] [CrossRef]
- Glowacz, A. DC Motor Fault Analysis with the Use of Acoustic Signals, Coiflet Wavelet Transform, and K-Nearest Neighbor Classifier. Arch. Acoust. 2015, 40, 321–327. [Google Scholar] [CrossRef]
- Mallat, S.G. A theory for multiresolution signal decomposition: The wavelet representation. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 674–693. [Google Scholar] [CrossRef]
- Dash, R.N.; Subudhi, B.; Das, S. Induction motor stator inter- turn fault detection using wavelet transform technique. In Proceedings of the International Conference on Industrial and Information Systems, Mangalore, India, 29 July–1 August 2010; pp. 436–441. [Google Scholar]
- Pilloni, A.; Pisano, A.; Riera-Guasp, M.; Puche-Panadero, R.; Pineda-Sanchez, M. Fault detection in induction motors. In AC Electric Motors Control: Advanced Design Techniques and Applications, 1st ed.; Giri, F., Ed.; John Wiley & Sons Ltd.: Oxford, UK, 2013; pp. 275–309. [Google Scholar] [CrossRef]
- Polikar, R. Multi Resolution Analysis: The Discrete Wavelet Transform. In The Wavelet Tutorial Part IV; Rowan University, College of Engineering Web Servers 10: Glassboro, NJ, USA, 1998. [Google Scholar]
- Bae, H.; Kim, Y.T.; Lee, S.H.; Kim, S.; Lee, M.H. Fault Diagnostic of Induction Motors for Equipment Reliability and Health Maintenance Based Upon Fourier and Wavelet Analysis. Artif. Life Robot. 2005, 9, 112–116. [Google Scholar] [CrossRef]
- Sadeghian, A.; Zhongming, Y.; Wu, B. Online Detection of Broken Rotor Bars in Induction Motors by Wavelet Packet Decomposition and Artificial Neural Networks. IEEE Trans. Instrum. Meas. 2009, 58, 2253–2263. [Google Scholar] [CrossRef]
- Romero-Troncoso, R.J.; Saucedo-Gallaga, R.; Cabal-Yepez, E.; Garcia-Perez, A.; Osornio-Rios, R.A.; Alvarez-Salas, R.; Huber, N. FPGA-based online detection of multiple combined faults in induction motors through information entropy and fuzzy inference. IEEE Trans. Ind. Electron. 2011, 58, 5263–5270. [Google Scholar] [CrossRef]
- Hernandez-Vargas, M.; Cabal-Yepez, E.; Garcia-Perez, A.; Romero-Troncoso, R.J. Novel methodology for broken-rotor-bar and bearing faults detection through SVD and information entropy. J. Sci. Ind. Res. 2012, 71, 589–593. [Google Scholar]
- Cabal-Yepez, E.; Valtierra-Rodriguez, M.; Romero-Troncoso, R.J.; Garcia-Perez, A.; Osornio-Rios, R.A.; Miranda-Vidales, H.; Alvarez-Salas, R. FPGA-based entropy neural processor for online detection of multiple combined faults on induction motors. Mech. Syst. Signal Process. 2011, 30, 123–130. [Google Scholar] [CrossRef]
- Pan, S.; Han, T.; Tan, A.C.; Lin, T.R. Fault diagnosis system of induction motors based on multiscale entropy and support vector machine with mutual information algorithm. Shock Vib. 2016. [Google Scholar] [CrossRef]
- Huo, Z.; Zhang, Y.; Shu, L. A Short Survey on Fault Diagnosis of Rotating Machinery Using Entropy Techniques. In Proceedings of the 3rd EAI International Conference on Industrial Networks and Intelligent Systems, Ho Chi Minh City, Vietnam, 4 September 2017. [Google Scholar]
- Antonino-Daviu, J.A.; Riera-Guasp, M.; Roger-Folch, J.; Martínez-Giménez, F.; Peris, A. Application and Optimization of the Discrete Wavelet Transform for the Detection of Broken Rotor Bars in Induction Machines. Appl. Comput. Harmon. Anal. 2006, 22, 268–279. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Rusek, J.; Roger-Folch, J. Diagnosis of Rotor Asymmetries in Induction Motors Based on the Transient Extraction of Fault Components Using Filtering Techniques. Electr. Power Syst. Res. 2009, 79, 1181–1191. [Google Scholar] [CrossRef]
- Tran, V.T.; AlThobiani, F.; Ball, A.; Choi, B.K. An Application to Transient Current Signal Based Induction Motor Fault diagnosis of Fourier–Bessel expansion and Simplified Fuzzy ARTMAP. Expert Syst. Appl. 2013, 40, 5372–5384. [Google Scholar] [CrossRef]
- Cabal-Yepez, E.; Romero-Troncoso, R.J.; Garcia-Perez, A.; Osornio-Rios, R.A. Single-Parameter Fault Identification through Information Entropy Analysis at the Startup-Transient Current in Induction Motors. Electr. Power Syst. Res. 2012, 89, 64–69. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
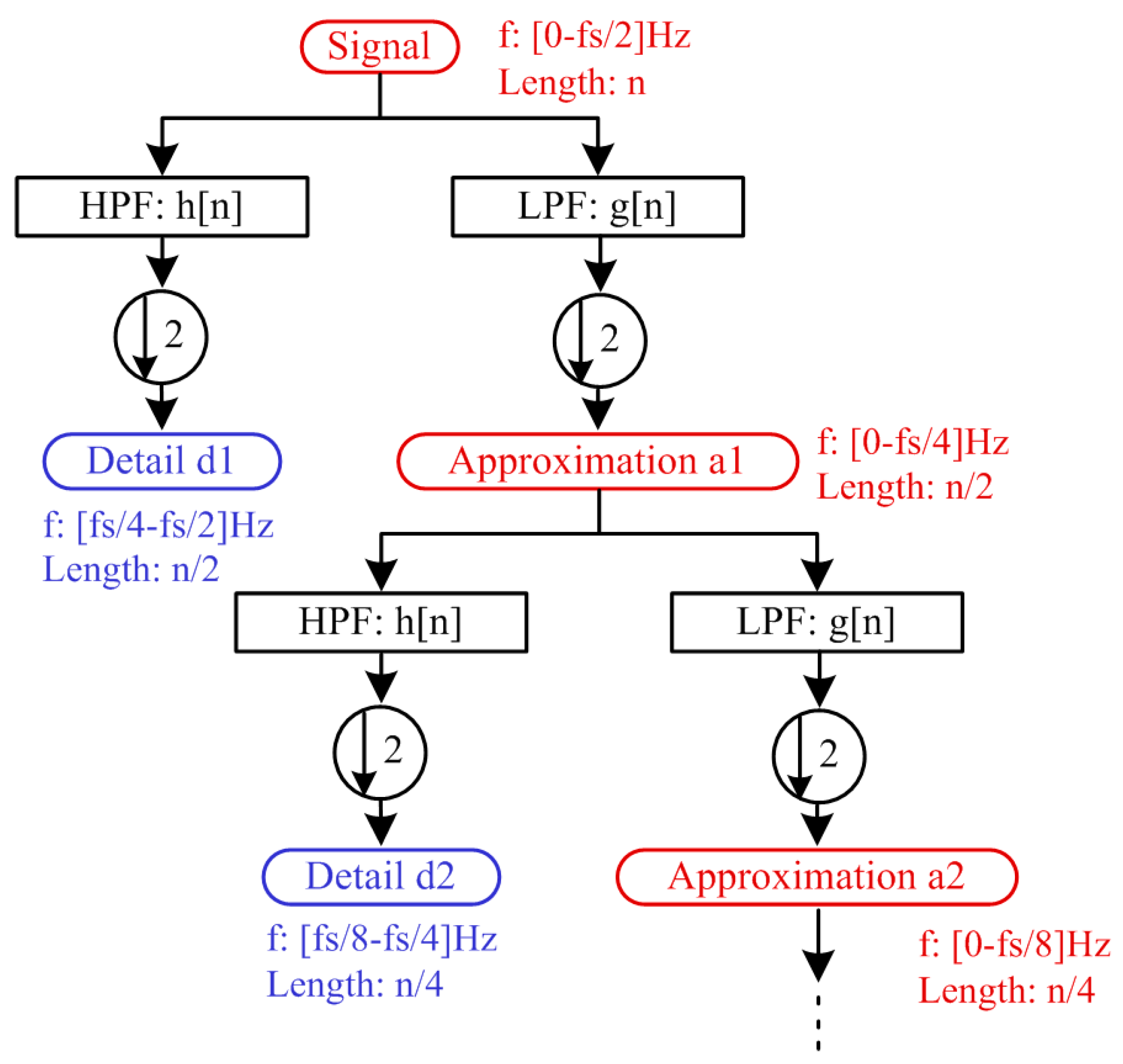
| Decomposition Level | Frequency Ranges (Hz) | |
|---|---|---|
| Detail (D) | Approximation (A) | |
| level 1 | 2500–1250 | 1250–0 |
| level 2 | 1250–625 | 625–0 |
| level 3 | 625–312.5 | 312.5–0 |
| level 4 | 312.5–156.2 | 156.2–0 |
| level 5 | 156.25–78.12 | 78.12–0 |
| level 6 | 78.12–39.06 | 39.06–0 |
| level 7 | 39.06–19.53 | 19.53–0 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Rated Power (HP) | 1 | Starting Torque (Nm) | 2.3 |
| Rated Voltage (V) | 415 | Number of Poles | 4 |
| Rated Frequency (Hz) | 50 | Connection | Y |
| Rated Torque (Nm) | 4.8 | Number of Stator Slots | 24 |
| Rated Speed (rpm) | 1500 | Number of Rotor Slots | 16 |
| Rated Current (A) | 1.3 | Permanent Magnet | N38H |
| Shannon Entropy | Source | Sum of Squares | df | Mean Square | F | p-Value | |
| A6 | Motor Condition | 2.86 × 108 | 1 | 2.86 × 108 | 15.635 | 9.51 × 10−5 | |
| Load | 5.35 × 109 | 3 | 1.78 × 109 | 97.572 | 1.45 × 10−44 | ||
| Interaction | 1.66 × 107 | 3 | 5.53 × 106 | 0.302 | 0.824 * | ||
| Error | 5.70 × 109 | 312 | 1.83 × 107 | ||||
| Total | 1.14 × 1010 | 319 | |||||
| A7 | Motor Condition | 8.96 × 107 | 1 | 8.96 × 107 | 25.851 | 6.37 × 10−7 | |
| Load | 1.87 × 108 | 3 | 6.22 × 107 | 17.941 | 9.11 × 10−11 | ||
| Interaction | 3.96 × 107 | 3 | 1.32 × 107 | 3.808 | 1.05 × 10−2 | ||
| Error | 1.08 × 109 | 312 | 3.47 × 106 | ||||
| Total | 1.40 × 109 | 319 | |||||
| D7 | Motor Condition | 2.34 × 107 | 1 | 2.34 × 107 | 1.284 | 0.258 * | |
| Load | 3.07 × 109 | 3 | 1.02 × 109 | 56.233 | 4.4 × 10−29 | ||
| Interaction | 1.02 × 108 | 3 | 3.41 × 107 | 1.874 | 0.134 * | ||
| Error | 5.68 × 109 | 312 | 1.82 × 107 | ||||
| Total | 8.87 × 109 | 319 | |||||
| Log-energy Entropy | Source | Sum of Squares | df | Mean Square | F | p-Value | |
| A6 | Motor Condition | 2.43 × 108 | 1 | 2.43 × 108 | 304.907 | 4.17 × 10−48 | |
| Load | 1.56 × 109 | 3 | 5.21 × 108 | 654.401 | 3.24 × 10−134 | ||
| Interaction | 6.10 × 107 | 3 | 2.03 × 107 | 25.535 | 8.47 × 10−15 | ||
| Error | 2.48 × 108 | 312 | 7.96 × 105 | ||||
| Total | 2.12 × 109 | 319 | |||||
| A7 | Motor Condition | 2.06 × 107 | 1 | 2.06 × 107 | 5.854 | 1.61 × 10−2 | |
| Load | 1.87 × 109 | 3 | 6.22 × 108 | 176.656 | 6.20 × 10−67 | ||
| Interaction | 2.77 × 108 | 3 | 9.24 × 107 | 26.246 | 3.65 × 10−15 | ||
| Error | 1.10 × 109 | 312 | 3.52 × 106 | ||||
| Total | 3.26 × 109 | 319 | |||||
| D7 | Motor Condition | 1.72 × 108 | 1 | 1.72 × 108 | 228.217 | 4.44 × 10−39 | |
| Load | 1.34 × 109 | 3 | 4.48 × 108 | 594.107 | 1.3 × 10−128 | ||
| Interaction | 5.81 × 107 | 3 | 1.94 × 107 | 25.709 | 6.88 × 10−15 | ||
| Error | 2.35 × 108 | 312 | 7.54 × 105 | ||||
| Total | 1.81 × 109 | 319 | |||||
| Load (Nm) | Shannon Entropy | Log-Energy Entropy | ||||
|---|---|---|---|---|---|---|
| A6 | A7 | D7 | A6 | A7 | D7 | |
| 0 | 0.448 * | 1.00 * | 0.58 * | 3.5 × 10−7 | 4.2 × 10−7 | 3.0 × 10−7 |
| 0.5 | 0.153 * | 0.40 * | 0.84 * | 1.2 × 10−7 | 6.4 × 10−5 | 9.4 × 10−6 |
| 1 | 0.911 * | 2.2 × 10−3 | 0.939 * | 6.0 × 10−8 | 1.00 * | 5.5 × 10−4 |
| 1.5 | 0.494 * | 8.3 × 10−4 | 1.00 * | 6.0 × 1−8 | 1.3 × 10−6 | 6.0 × 10−8 |
| Coefficientat Decomposition Level | Frequency Ranges (Hz) | Simulation | Experimental | ||
|---|---|---|---|---|---|
| Shannon Entropy | Log-Energy Entropy | Shannon Entropy | Log-Energy Entropy | ||
| Approximation (6) | [39.06–0] | Na | A | Na | A |
| Detail (7) | [39.06–19.53] | Na | A | Na | A |
| Approximation (7) | [19.53–0] | Na | Na | Na | Na |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rezazadeh Mehrjou, M.; Mariun, N.; Misron, N.; Radzi, M.A.M.; Musa, S. Broken Rotor Bar Detection in LS-PMSM Based on Startup Current Analysis Using Wavelet Entropy Features. Appl. Sci. 2017, 7, 845. https://doi.org/10.3390/app7080845
Rezazadeh Mehrjou M, Mariun N, Misron N, Radzi MAM, Musa S. Broken Rotor Bar Detection in LS-PMSM Based on Startup Current Analysis Using Wavelet Entropy Features. Applied Sciences. 2017; 7(8):845. https://doi.org/10.3390/app7080845
Chicago/Turabian StyleRezazadeh Mehrjou, Mohammad, Norman Mariun, Norhisam Misron, Mohd Amran Mohd Radzi, and Suleiman Musa. 2017. "Broken Rotor Bar Detection in LS-PMSM Based on Startup Current Analysis Using Wavelet Entropy Features" Applied Sciences 7, no. 8: 845. https://doi.org/10.3390/app7080845
APA StyleRezazadeh Mehrjou, M., Mariun, N., Misron, N., Radzi, M. A. M., & Musa, S. (2017). Broken Rotor Bar Detection in LS-PMSM Based on Startup Current Analysis Using Wavelet Entropy Features. Applied Sciences, 7(8), 845. https://doi.org/10.3390/app7080845