Accurate Sparse Recovery of Rayleigh Wave Characteristics Using Fast Analysis of Wave Speed (FAWS) Algorithm for Soft Soil Layers



Abstract
:1. Introduction
2. Materials and Methods
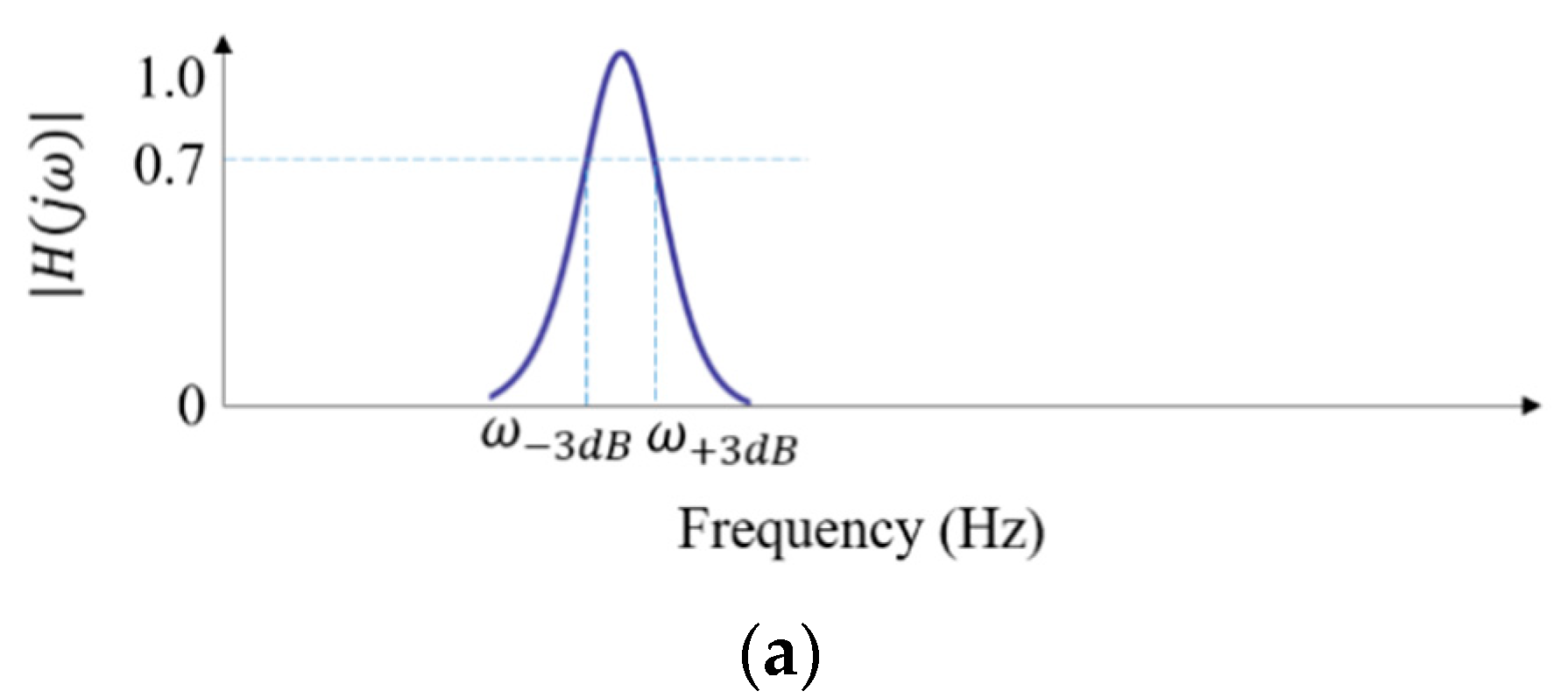
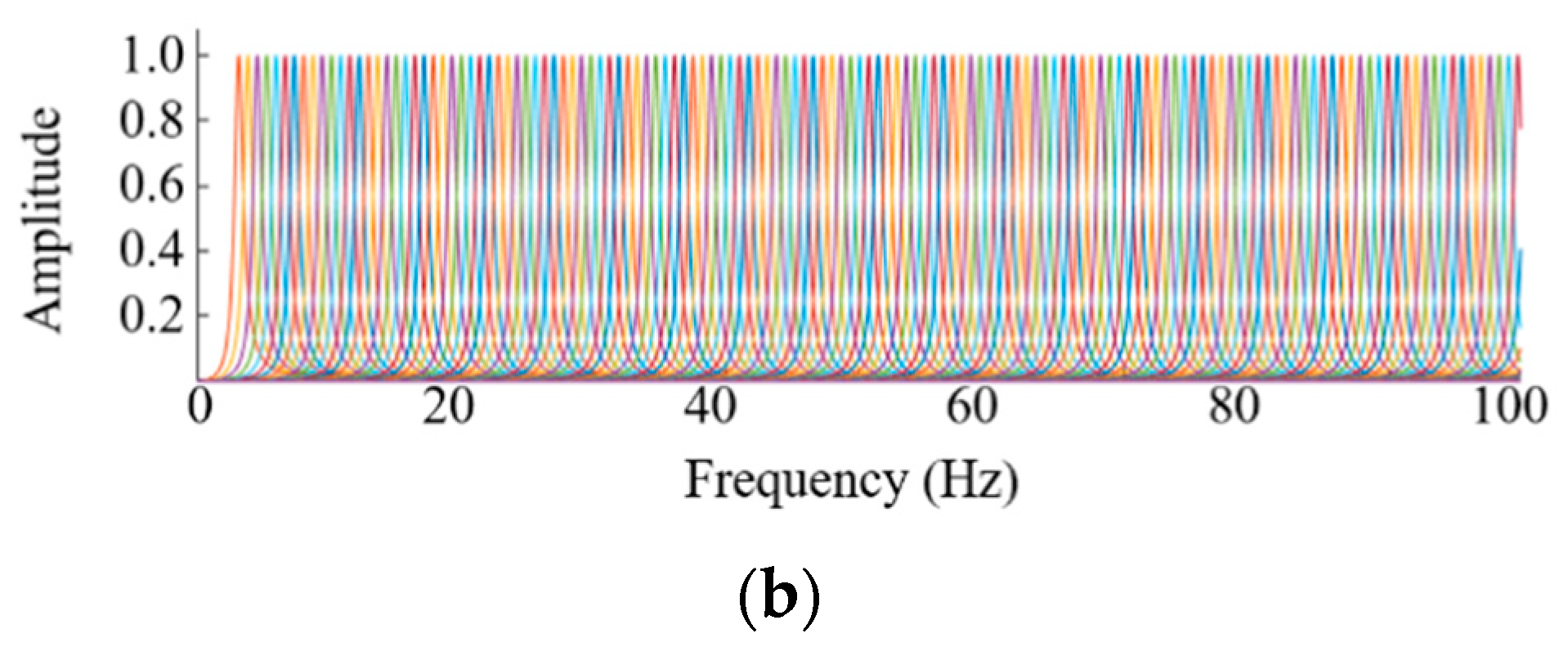
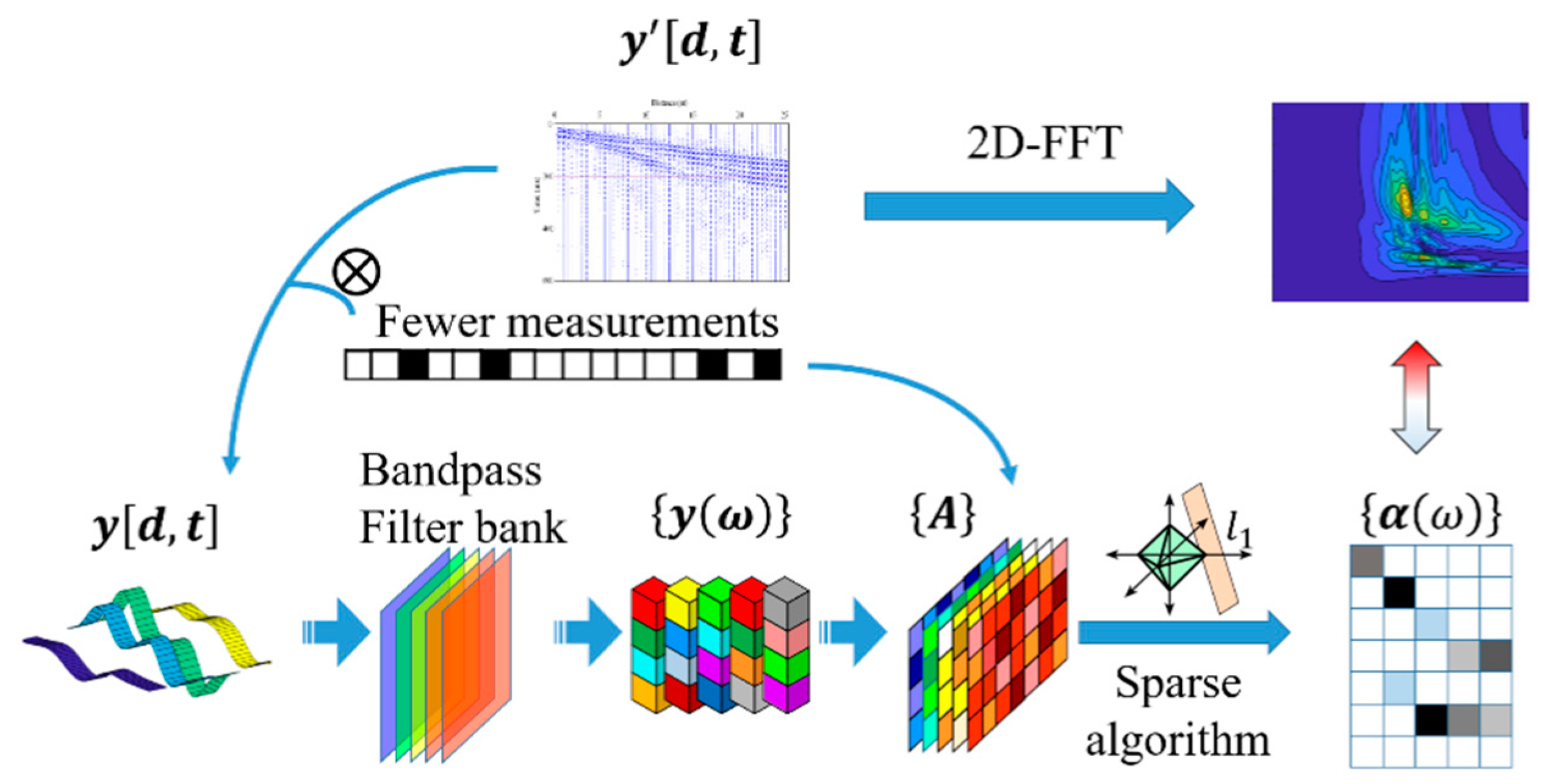
2.1. Compressive Sensing Framework
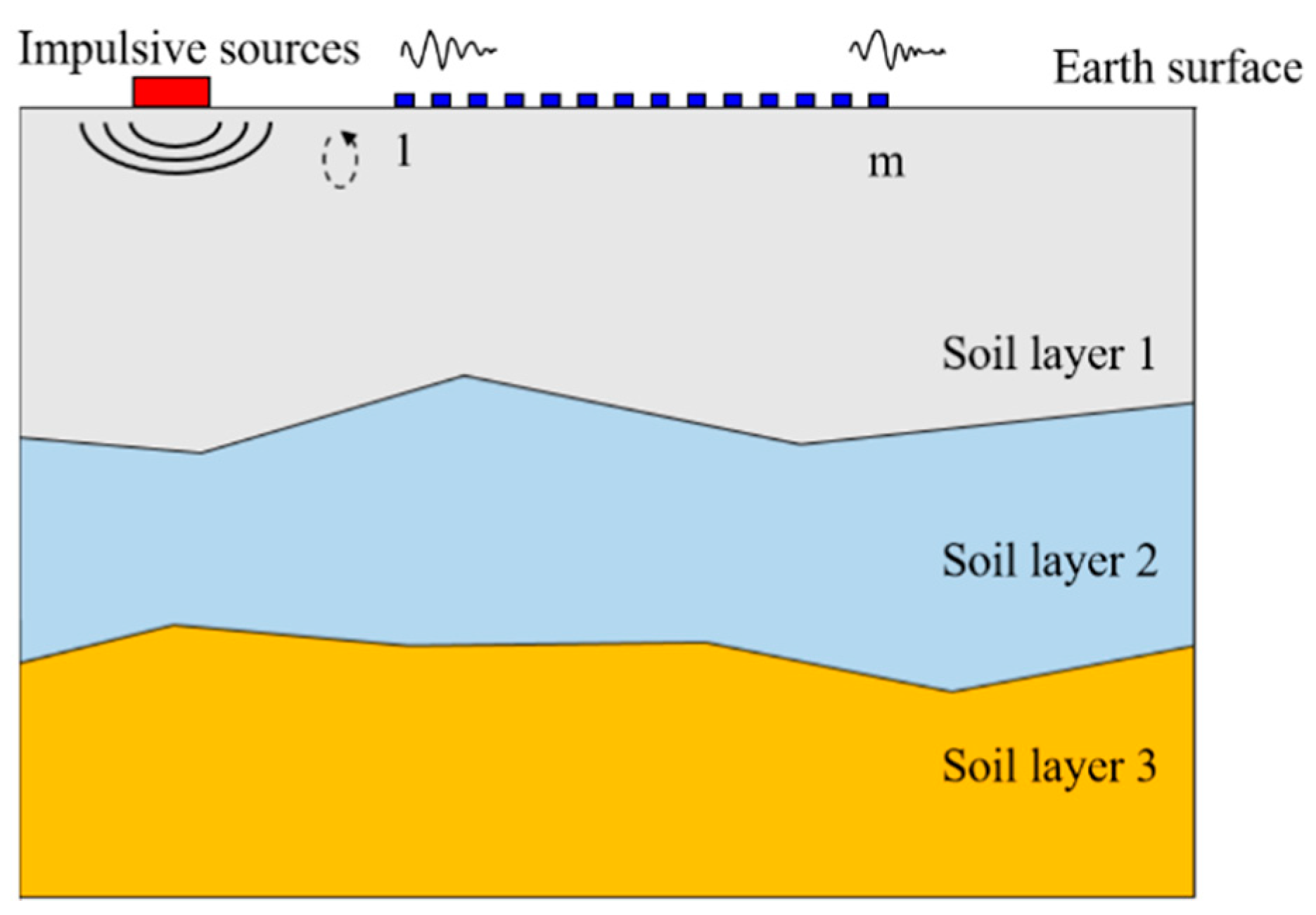
2.2. Wave Field Imaging
3. Results and Discussion
3.1. Conventional Even-Spaced Array Results
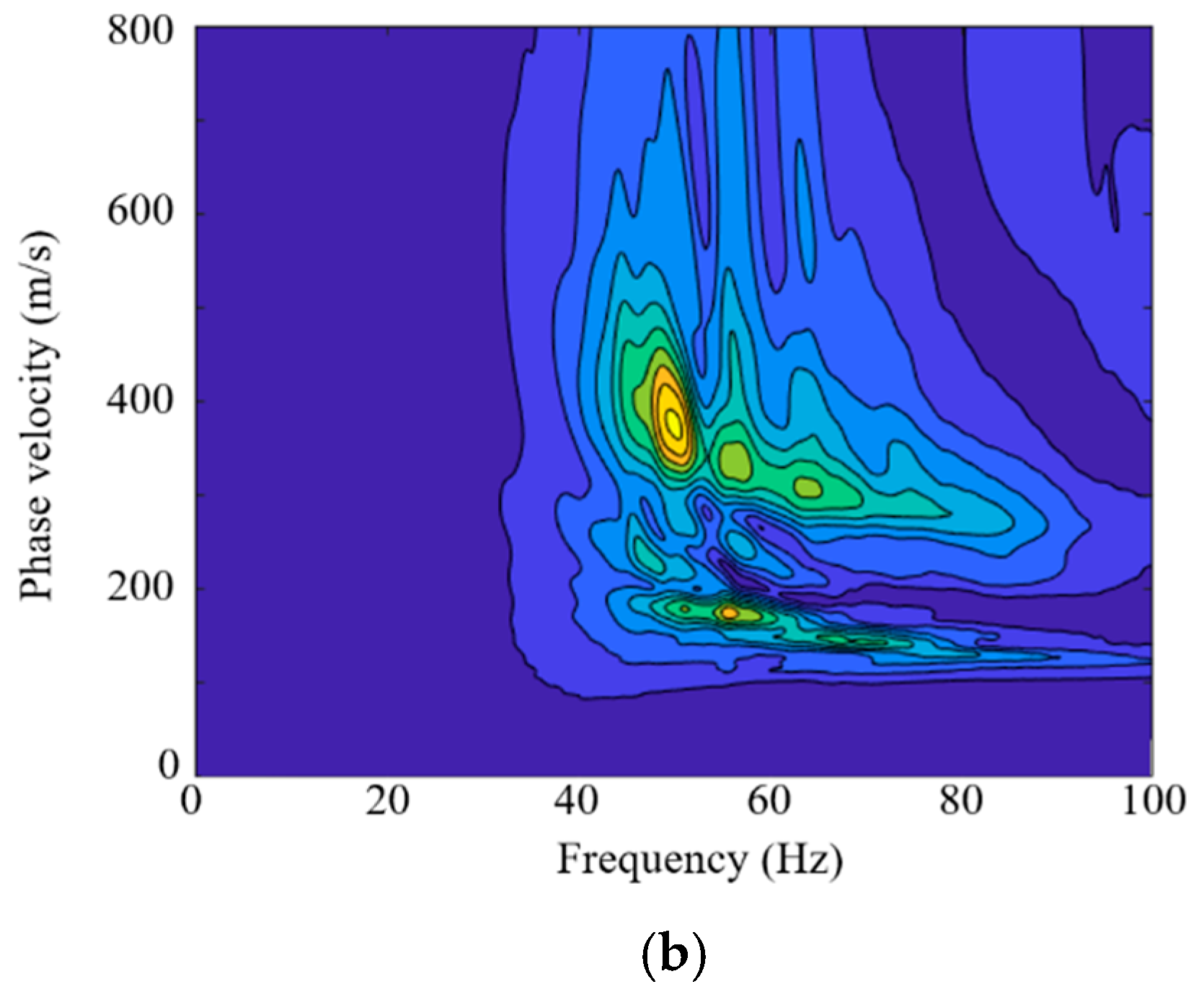
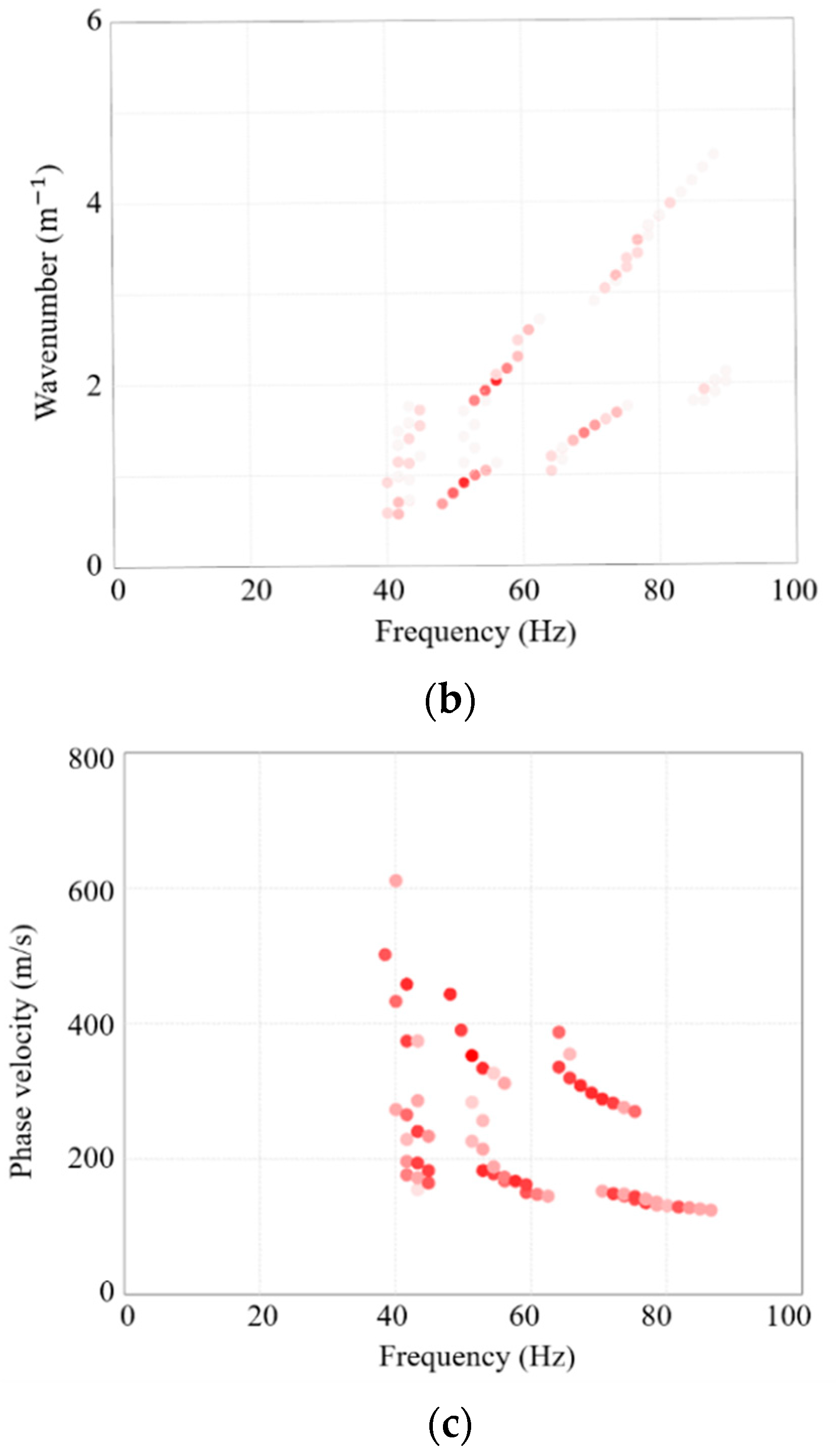
3.2. Results of the Proposed Fast Analysis of Wave Speed (FAWS) Method
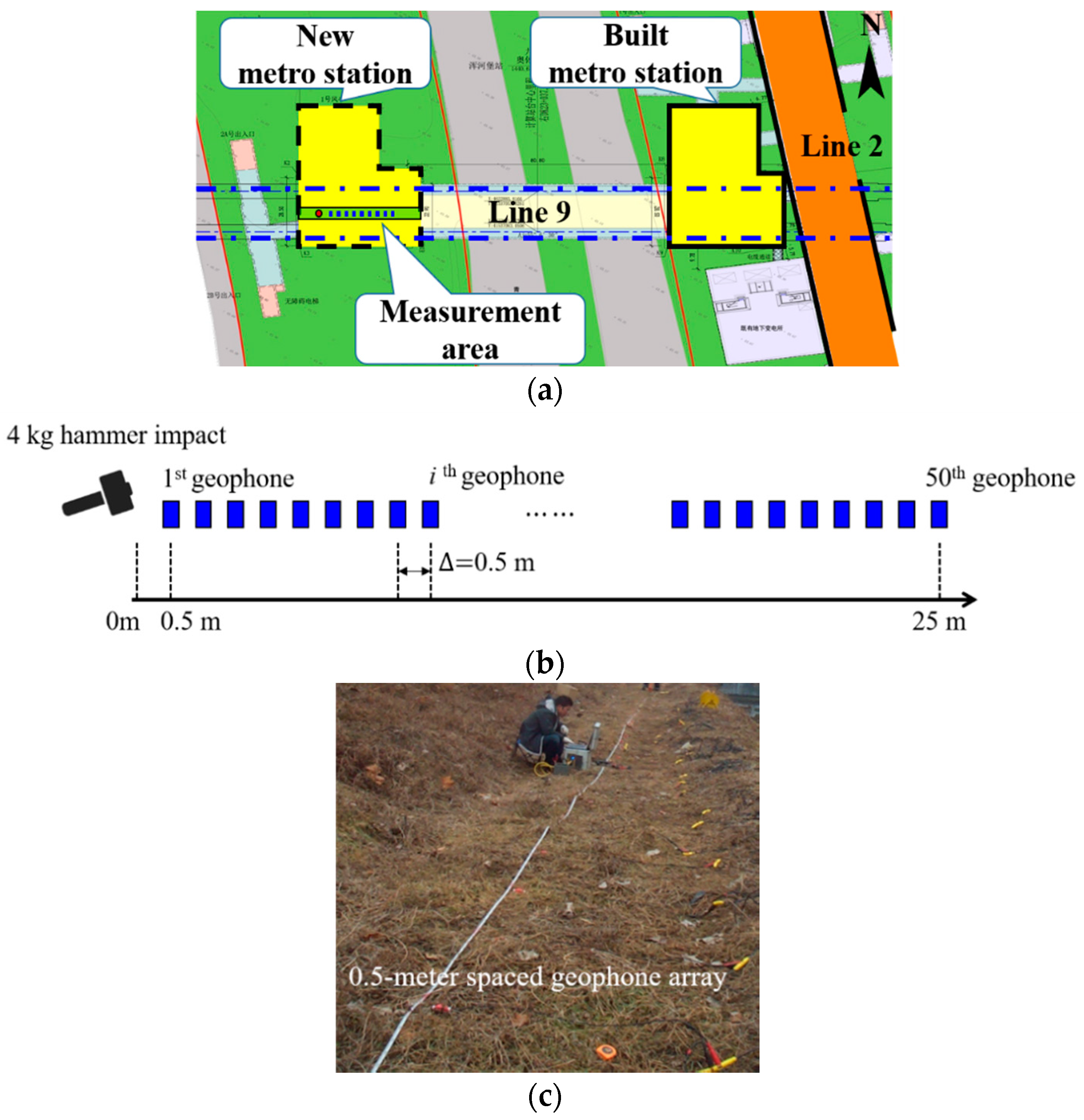
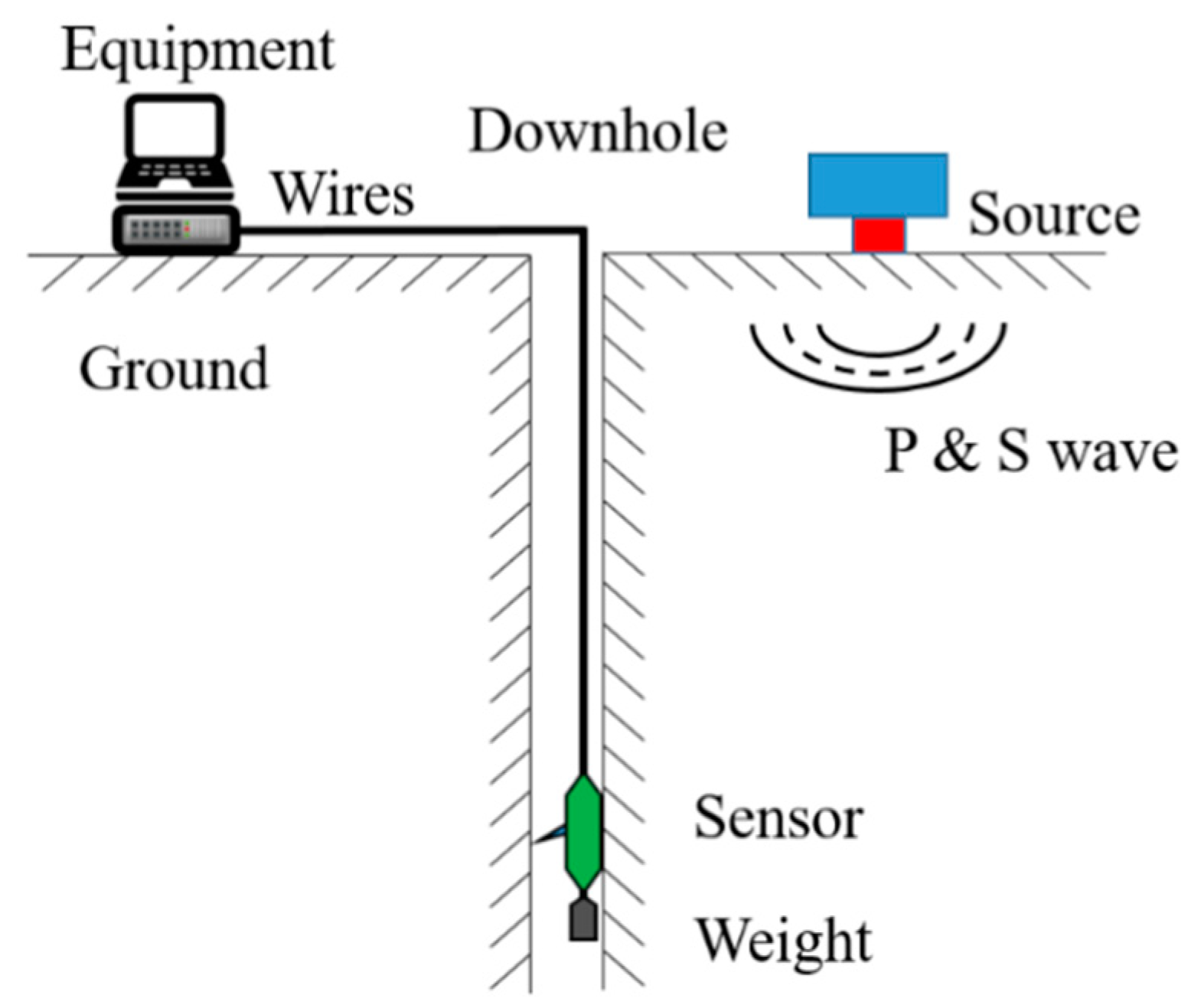
3.3. In-Site Downhole Testing Results
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Feng, L.; Yi, X.; Zhu, D.; Xie, X.; Wang, Y. Damage detection of metro tunnel structure through transmissibility function and cross correlation analysis using local excitation and measurement. Mech. Syst. Signal Process. 2015, 60, 59–74. [Google Scholar] [CrossRef]
- Shen, S.-L.; Wu, H.-N.; Cui, Y.-J.; Yin, Z.-Y. Long-term settlement behaviour of metro tunnels in the soft deposits of Shanghai. Tunn. Undergr. Space Technol. 2014, 40, 309–323. [Google Scholar] [CrossRef]
- Goel, R.K.; Singh, B.; Zhao, J. Underground Infrastructures: Planning, Design, and Construction; Butterworth-Heinemann: Oxford, UK, 2012. [Google Scholar]
- Fang, Q.; Zhang, D.; Wong, L.N.Y. Shallow tunnelling method (STM) for subway station construction in soft ground. Tunn. Undergr. Space Technol. 2012, 29, 10–30. [Google Scholar] [CrossRef]
- Ding, L.; Zhou, C. Development of web-based system for safety risk early warning in urban metro construction. Autom. Constr. 2013, 34, 45–55. [Google Scholar] [CrossRef]
- Wang, M. An overview of development of railways, tunnels and underground works in China. Tunn. Constr. 2010, 4, 351–364. [Google Scholar]
- Foti, S.; Parolai, S.; Albarello, D.; Picozzi, M. Application of surface-wave methods for seismic site characterization. Surv. Geophys. 2011, 32, 777–825. [Google Scholar] [CrossRef]
- Foti, S.; Lai, C.G.; Rix, G.J.; Strobbia, C. Surface Wave Methods for Near-Surface Site Characterization; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Jones, R. Surface wave technique for measuring the elastic properties and thickness of roads: Theoretical development. Br. J. Appl. Phys. 1962, 13, 21. [Google Scholar] [CrossRef]
- Jongmans, D.; Demanet, D. The importance of surface waves in vibration study and the use of Rayleigh waves for estimating the dynamic characteristics of soils. Eng. Geol. 1993, 34, 105–113. [Google Scholar] [CrossRef]
- Nazarian, S. In situ shear wave velocity from spectral analysis of surface waves. In Proceedings of the 8th World Conference on Earthquake Engineering, San Francisco, CA, USA, 21–28 July 1984; pp. 31–38. [Google Scholar]
- Maraschini, M.; Ernst, F.; Foti, S.; Socco, L.V. A new misfit function for multimodal inversion of surface waves. Geophysics 2010, 75, G31–G43. [Google Scholar] [CrossRef]
- Socco, L.V.; Foti, S.; Boiero, D. Surface-wave analysis for building near-surface velocity Models—Established approaches and new perspectives. Geophysics 2010, 75, 83–102. [Google Scholar] [CrossRef]
- Harley, J.B.; Moura, J.M. Sparse recovery of the multimodal and dispersive characteristics of Lamb waves. J. Acoust. Soc. Am. 2013, 133, 2732–2745. [Google Scholar] [CrossRef] [PubMed]
- Di Ianni, T.; De Marchi, L.; Perelli, A.; Marzani, A. Compressive sensing of full wave field data for structural health monitoring applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2015, 62, 1373–1383. [Google Scholar] [CrossRef] [PubMed]
- Harley, J.B. Predictive guided wave models through sparse modal representations. Proc. IEEE 2016, 104, 1604–1619. [Google Scholar] [CrossRef]
- Xu, K.; Minonzio, J.-G.; Ta, D.; Hu, B.; Wang, W.; Laugier, P. Sparse SVD method for high-resolution extraction of the dispersion curves of ultrasonic guided waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 1514–1524. [Google Scholar] [CrossRef] [PubMed]
- Drémeau, A.; Courtois, F.; Bonnel, J. Reconstruction of dispersion curves in the frequency-wavenumber domain using compressed sensing on a random array. IEEE J. Ocean. Eng. 2017, 42, 914–922. [Google Scholar] [CrossRef]
- Esfandabadi, Y.K.; De Marchi, L.; Testoni, N.; Marzani, A.; Masetti, G. Full wavefield analysis and damage imaging through compressive sensing in Lamb wave inspections. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2018, 65, 269–280. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Bao, Y.; Zhou, W.; Li, H. Sparse representation for Lamb-wave-based damage detection using a dictionary algorithm. Ultrasonics 2018, 87, 48–58. [Google Scholar] [CrossRef] [PubMed]
- Jiang, B.; Jia, P.; Zhao, W.; Wang, W. The application of compressive sampling in rapid ultrasonic computerized tomography (UCT) technique of steel tube slab (STS). PLoS ONE 2018, 13, e0190281. [Google Scholar] [CrossRef] [PubMed]
- Jiang, B.; Zhao, W.; Wang, W. Improved ultrasonic computerized tomography method for STS (Steel Tube Slab) structure based on compressive sampling algorithm. Appl. Sci. 2017, 7, 432. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed Sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candès, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Candès, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J.K.; Tao, T. Stable signal recovery from incomplete and inaccurate measurements. Commun. Pure Appl. Math. 2006, 59, 1207–1223. [Google Scholar] [CrossRef] [Green Version]
- Baraniuk, R.G. Compressive sensing. IEEE Signal Process. Mag. 2007, 24, 118–121. [Google Scholar] [CrossRef]
- Malioutov, D.; Cetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef] [Green Version]
- Mesnil, O.; Ruzzene, M. Sparse wavefield reconstruction and source detection using compressed sensing. Ultrasonics 2016, 67, 94–104. [Google Scholar] [CrossRef] [PubMed]
- ASTM. Standard Test Methods for Downhole Seismic Testing; ASTM International: West Conshohocken, PA, USA, 2017. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bore Hole Number | Soil Type | Depth (m) | Shear Wave Velocity (m/s) | Compression Wave Velocity (m/s) |
|---|---|---|---|---|
| ZDBC-01 | Topsoil | 2.9 | 170 | 445 |
| Silt and clay | 5.3 | 200 | 529 | |
| Sand | 7.8 | 269 | 709 | |
| ZDBC-02 | Topsoil | 2.2 | 154 | 424 |
| Silt and clay | 4.3 | 195 | 532 | |
| Sand | 8.5 | 244 | 634 | |
| ZDBC-03 | Topsoil | 3 | 161 | 431 |
| Silt and clay | 5.2 | 199 | 523 | |
| Sand | 6.8 | 261 | 681 | |
| ZDBC-04 | Topsoil | 3.4 | 172 | 439 |
| Silt and clay | 6 | 187 | 488 | |
| Sand | 5.6 | 257 | 678 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Jiang, B.; Song, J.; Wang, W. Accurate Sparse Recovery of Rayleigh Wave Characteristics Using Fast Analysis of Wave Speed (FAWS) Algorithm for Soft Soil Layers. Appl. Sci. 2018, 8, 1204. https://doi.org/10.3390/app8071204
Chen Z, Jiang B, Song J, Wang W. Accurate Sparse Recovery of Rayleigh Wave Characteristics Using Fast Analysis of Wave Speed (FAWS) Algorithm for Soft Soil Layers. Applied Sciences. 2018; 8(7):1204. https://doi.org/10.3390/app8071204
Chicago/Turabian StyleChen, Zhuoshi, Baofeng Jiang, Jingjing Song, and Wentao Wang. 2018. "Accurate Sparse Recovery of Rayleigh Wave Characteristics Using Fast Analysis of Wave Speed (FAWS) Algorithm for Soft Soil Layers" Applied Sciences 8, no. 7: 1204. https://doi.org/10.3390/app8071204
APA StyleChen, Z., Jiang, B., Song, J., & Wang, W. (2018). Accurate Sparse Recovery of Rayleigh Wave Characteristics Using Fast Analysis of Wave Speed (FAWS) Algorithm for Soft Soil Layers. Applied Sciences, 8(7), 1204. https://doi.org/10.3390/app8071204